



-
摘要:
针对存在随机分布目标的区域快速搜索问题开展研究,考虑无人机有限通信能力和探测信息的实时回传需求,提出了一种基于角色切换策略的多无人机协同区域搜索方法。首先,考虑各无人机平台的历史搜索信息和协同搜索收益,基于概率传感器模型构建了多无人机协同区域搜索求解框架;其次,基于4项无人机节点重要性的评价指标,采用改进逼近理想解排序法(TOPSIS)完成无人机节点重要性评估,通过无人机角色动态切换实现了区域搜索过程中协同搜索收益与网络连通性的平衡;最后,考虑机间防撞、通信保持、无人机运动学等约束条件,利用分布式滚动时域优化方法完成各无人机在线运动规划,实现多无人机协同区域搜索。仿真结果表明了所提方法的可行性和有效性。
-
关键词:
- 无人机 /
- 节点重要性 /
- 角色切换策略 /
- 协同区域搜索 /
- 改进逼近理想解排序法(TOPSIS)
Abstract:With limited communication range and real-time information transmission via multihop communications, a novel multi-UAV cooperative surveillance method based on role switch strategy is proposed for searching unknown region and monitoring some hotspots. Firstly, considering history detection information and cooperative surveillance, a multi-UAV cooperative surveillance frame is implemented based on probabilistic sensor model. Secondly, four attributes are proposed to characterize differences among UAV alternatives in communication network containing ground station, and a novel UAVs role switch strategy is proposed based on UAV node importance evaluation to achieve tradeoff between surveillance mission and connectivity maintenance with improved Technique for Order Preferenceby Similarity to Ideal Solution (TOPSIS). Finally, considering collision avoidance, connectivity maintenance and UAV dynamics constraints, UAVs motion plan is optimized by distributed receding horizon control based on different UAV roles to achieve multi-UAV cooperative surveillance. Simulation results demonstrate the feasibility and effectiveness of the proposed methods in multi-UAV cooperative surveillance.
-

图 2 协同区域搜索任务中无人机角色切换关系
Figure 2. Role switch relationship among UAVs in cooperative surveillance
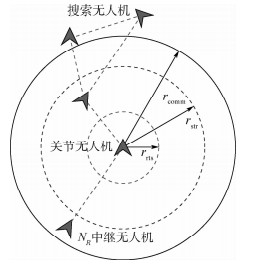
图 3 角色调整阶段无人机相对位置关系
Figure 3. Geometry relationship among different UAVs in role conversion stage
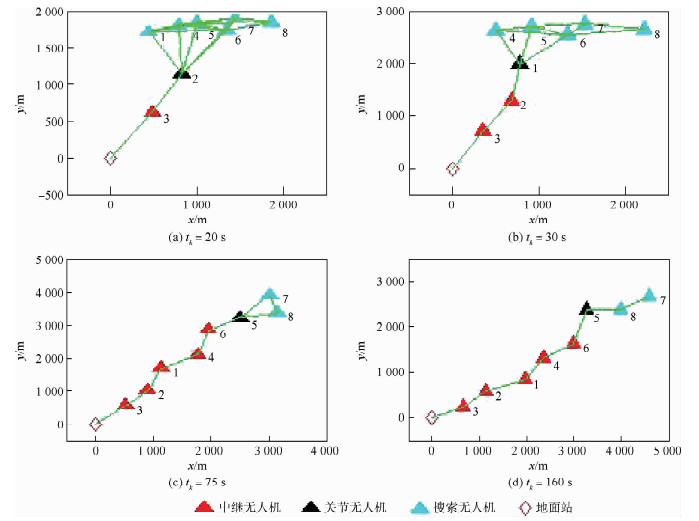
图 7 多无人机协同区域搜索中无人机角色切换
Figure 7. UAV role switch in multi-UAV cooperative surveillance

图 9 不同传感器能力下的协同搜索收益
Figure 9. Cooperative search payoff under differentsensor capacities
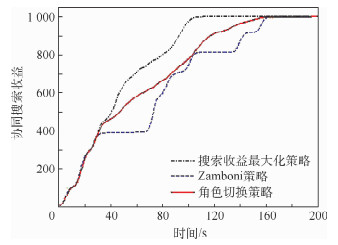
图 10 不同搜索策略下的协同搜索收益
Figure 10. Cooperative search payoff under different search strategies
表 1 协同区域搜索任务中无人机角色信息
Table 1. UAV roles in cooperative surveillance
角色 功能 目标 中继无人机 提供机间数据传输服务 确保地面站与关节无人机间的通信连接 关节无人机 连接搜索无人机和中继无人机 平衡搜索任务和网络连通性 搜索无人机 搜索未知区域获取目标信息 最大化协同搜索收益  下载: 导出CSV
下载: 导出CSV
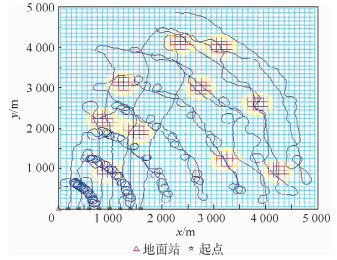
表 2 不同传感器能力下的多无人机协同区域搜索结果
Table 2. Multi-UAV cooperative surveillance results under different sensor capacities
传感器能力(距离、方位角、俯仰角) 平均发现目标数目 平均网格探测比例/% 平均最小完成任务时间/s 600 m, 75°, 30° 10 0.904 32 127.55 600 m, 60°, 30° 10 0.906 16 130.1 500 m, 60°, 30° 10 0.861 2 133.3 400 m, 45°, 30° 8.7 0.714 76 178.75 300 m, 45°, 30° 7.4 0.566 24 183.2
下载: 导出CSV
-
[1] HU J, XIE L, LUM K Y, et al. Multiagent information fusion and cooperative control in target search[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1223-1235. doi: 10.1109/TCST.2012.2198650 [2] ZHU Q, ZHOU R, ZHANG J. Connectivity maintenance based on multiple relay UAVs selection scheme in cooperative surveillance[J]. Applied Science, 2017, 7(1): 8. [3] HUANG Q, YAO J, LI Q, et al.Cooperative searching strategy for multiple unmanned aerial vehicles based on modified probability map[C]//Asian Simulation Conference.Berlin: Springer, 2016: 279-287. [4] KUIPER E, NADJM-TEHRANI S.Mobility models for UAV group reconnaissance applications[C]//International Conference on Wireless and Mobile Communications.Piscataway: IEEE Press, 2006: 33-39. [5] SHEN D, WEI R X, RU C J. Digital-pheromone-based control method for UAV swarm search[J]. Systems Engineering and Electronics, 2013, 35(3): 591-596. [6] GIL A E, PASSINO K M, CRUZ JR J B. Stable cooperative surveillance with information flow constraints[J]. IEEE Transactions on Control Systems Technology, 2008, 16(5): 856-868. doi: 10.1109/TCST.2007.916329 [7] DI B, ZHOU R, DUAN H. Potential field based receding horizon motion planning for centrality-aware multiple UAV cooperative surveillance[J]. Aerospace Science and Technology, 2015, 46: 386-397. doi: 10.1016/j.ast.2015.08.006 [8] TUNA G, NEFZI B, CONTE G. Unmanned aerial vehicle-aided communications system for disaster recovery[J]. Journal of Network and Computer Applications, 2014, 41: 27-36. doi: 10.1016/j.jnca.2013.10.002 [9] WAHARTE S, TRIGONI N.Supporting search and rescue operations with UAVs[C]//2010 International Conference on Emerging Security Technologies.Piscataway: IEEE Press, 2010: 142-147. [10] YAO P, XIE Z, REN P. Optimal UAV route planning for coverage search of stationary target in river[J]. IEEE Transactions on Control Systems Technology, 2019, 27(2): 822-829. doi: 10.1109/TCST.2017.2781655 [11] ERDELJ M, NATALIZIO E, CHOWDHURY K R, et al. Help from the sky: Leveraging UAVs for disaster management[J]. IEEE Pervasive Computing, 2017, 16(1): 24-32. doi: 10.1109/MPRV.2017.11 [12] ZHU S, WANG D. Adversarial ground target tracking using UAVs with input constraints[J]. Journal of Intelligent & Robotic Systems, 2012, 65(1-4): 521-532. [13] 朱黔, 周锐, 董卓宁, 等. 角度测量下双机协同standoff目标跟踪[J]. 北京航空航天大学学报, 2015, 41(11): 2116-2123. doi: 10.13700/j.bh.1001-5965.2014.0716ZHU Q, ZHOU R, DONG Z N, et al. Coordinated standoff target tracking using two UAVs with only bearing measurement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 2116-2123(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0716 [14] AKBARZADEH V, GAGNÉ C, PARIZEAU M, et al. Probabilistic sensing model for sensor placement optimization based on line-of-sight coverage[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(2): 293-303. doi: 10.1109/TIM.2012.2214952 [15] REN W, BEARD R W, ATKINS E M. Information consensus in multivehicle cooperative control[J]. IEEE Control Systems, 2007, 27(2): 71-82. doi: 10.1109/MCS.2007.338264 [16] GODDEMEIER N, DANIEL K, WIETFELD C. Role-based connectivity management with realistic air-to-ground channels for cooperative UAVs[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 951-963. doi: 10.1109/JSAC.2012.120610 [17] 任晓龙, 吕琳媛. 网络重要节点排序方法综述[J]. 科学通报, 2014, 59(13): 1175-1197.REN X L, LV L Y. Review of ranking nodes in complex networks[J]. Chinese Science Bulletin, 2014, 59(13): 1175-1197(in Chinese). [18] JACKSON M O. Social and economic networks[M]. Princeton: Princeton University Press, 2008: 39-83. [19] OKAMOTO K, CHEN W, LI X Y.Ranking of closeness centrality for large-scale social networks[C]//International Workshop on Frontiers in Algorithmics.Berlin: Springer, 2008: 186-195. [20] ESTRADA E, RODRIGUEZ-VELAZQUEZ J A. Subgraph centrality in complex networks[J]. Physical Review E, 2005, 71(5): 056103. doi: 10.1103/PhysRevE.71.056103 [21] BORGATTI S P. Centrality and network flow[J]. Social Networks, 2005, 27(1): 55-71. doi: 10.1016/j.socnet.2004.11.008 [22] WICHMANN A, KORKMAZ T, TOSUN A S.Minimum hop and/or minimum distance robot movement with connectivity constraints in WSRNs[C]//2014 IEEE Global Communications Conference.Piscataway: IEEE Press, 2014: 523-529. [23] LIU Z, JIANG C, WANG J, et al. The node importance in actual complex networks based on a multi-attribute ranking method[J]. Knowledge-Based Systems, 2015, 84: 56-66. doi: 10.1016/j.knosys.2015.03.026 [24] 赵萌, 邱菀华, 刘北上. 基于相对熵的多属性决策排序方法[J]. 控制与决策, 2010, 25(7): 1098-1100.ZHAO M, QIU W H, LIU B S. Relative entropy evaluation method for multiple attribute decision making[J]. Control and Decision, 2010, 25(7): 1098-1100(in Chinese). [25] CAMPONOGARA E, JIA D, KROGH B H, et al. Distributed model predictive control[J]. IEEE Control Systems, 2002, 22(1): 44-52. doi: 10.1109/37.980246 [26] FLINT M, POLYCARPOU M, FERNANDEZ-GAUCHERAND E.Cooperative control for multiple autonomous UAV's searching for targets[C]//Proceedings of the 41st IEEE Conference on Decision and Control.Piscataway: IEEE Press, 2002: 2823-2828. 期刊类型引用(5)
1. 董洁,段丁丁,宋博,王兴中. 基于多无人机协同测绘技术的山区地表覆被变化成像分析. 物探化探计算技术. 2025(01): 132-140 .  百度学术
百度学术2. 郑锴,李明明,郑献民,殷少锋,丁学亮. 面向影像拼接的多无人机覆盖搜索规划方法. 火力与指挥控制. 2025(02): 70-77 . 百度学术3. 王尔申,郭靖,宏晨,任虹帆,陈艾东,商新娜. 基于随机空间网络的无人机集群协同对抗模型. 北京航空航天大学学报. 2023(01): 10-16 .  本站查看
本站查看4. 刘正元,吴元清,李艳洲,王超. 多无人机群任务规划和编队飞行的综述和展望. 指挥与控制学报. 2023(06): 623-636 . 百度学术5. 华翔,石成泷,李宝华,张杰韬,左嘉娴. 一种自适应的无人集群中心节点选择方法. 系统仿真学报. 2021(11): 2636-2646 . 百度学术其他类型引用(3)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 893
- HTML全文浏览量: 219
- PDF下载量: 218
- 被引次数: 8
