



Autonomous planning of on-orbit evasion path based on Frenet and improved artificial potential field
-
摘要:
在轨道间机动的航天器规避空间目标,需兼顾沿转移轨道飞行的绝对运动和规避空间目标的相对运动,路径自主规划难度较大且目前国内外公开研究成果较少。针对上述问题,提出了一种将Frenet坐标系与改进人工势场相结合的在轨规避路径自主规划方法。首先,构建Frenet坐标系表述空间规避运动,解决了路径规划中航天器与既定转移轨道相对位置不易表述的难题,实现了空间规避运动的简便表示;其次,改进人工势场函数、调整势场作用区域,避免了传统人工势场法存在过早轨迹偏离以及局部震荡现象,实现了对空间目标的自主规避;最后,考虑规避安全、轨道保持、制动时效以及燃料消耗因素构建全局优化函数,能够满足不同任务的需求与偏好,实现了沿转移轨道飞行的最小偏移与快速恢复。算法比对与算例求解表明:所提方法应用优势明显,路径平滑、偏移量小,满足航天器规避空间目标的路径规划需求。
Abstract:In the process of evading the space target, the spacecraft should take into account the absolute motion of flight along the transfer orbit and the relative motion of evading the space target. The corresponding path automatic planning is difficult, and there are few public research results at home and abroad. In view of the above problems, a method of autonomous planning of on-orbit evasion path combining Frenet coordinate system and improved artificial potential field is proposed. Firstly, this method constructs Frenet coordinate system to express spacial evasive motion, solves the problem that the relative position of spacecraft and the given transfer orbit is not easy to express in path planning, and achieves a simple representation of spatial evasive motion. Secondly, this method improves the artificial potential field function, adjusts the area of action of the potential field, and avoids the phenomena of premature trajectory deviation and local oscillation in the traditional artificial potential field method, so as to achieve the autonomous evasion of the space target. Finally, the global optimization function is constructed by taking into account the factors of evasion safety, orbit holding, braking time and fuel consumption, which can meet the requirements and preferences of different tasks, so as to realize the minimum deviation and fast recovery of the flight along the transfer orbit. The results of algorithm comparison and numerical examples show that this method has obvious advantages in application, with smooth path and small offset, and can meet the requirements of path planning for spacecraft to evade space targets.
-

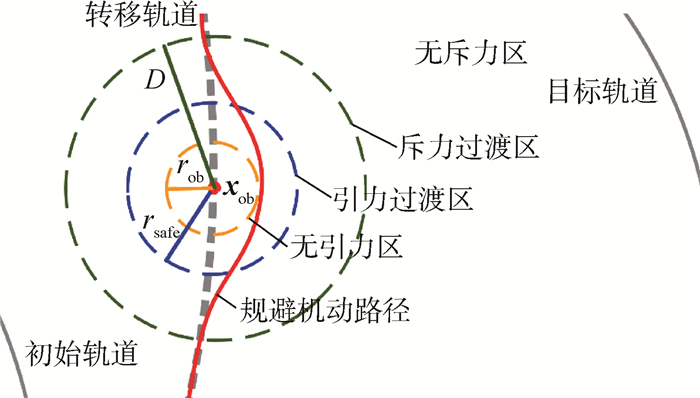
图 1 基于Frenet坐标系的航天器空间运动
Figure 1. Space motion of spacecraft based on Frenet coordinate system

图 2 航天器规避机动人工势场示意图
Figure 2. Schematic diagram of artificial potential field of spacecraft evasive maneuver

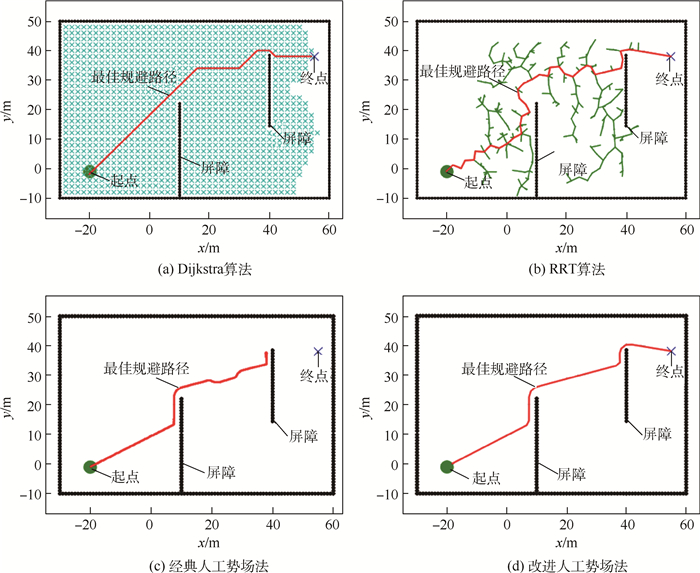
图 3 屏障规避问题的不同算法求解效果
Figure 3. Different algorithms to solve the problem of barrier evasion

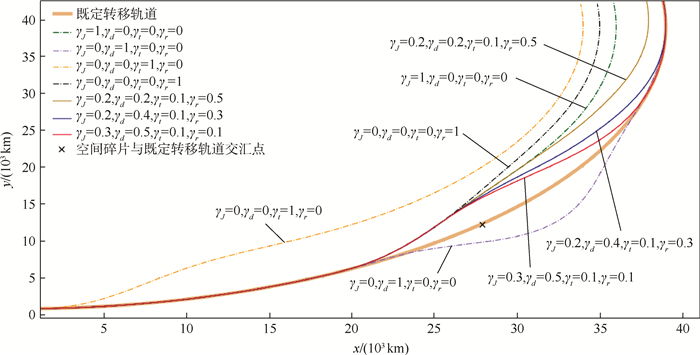
图 4 不同全局优化权重下的航天器机动规避路径
Figure 4. Maneuvering evasion path of spacecraft under different global optimization weights

图 5 不同全局优化权重下的横向偏移加速度
Figure 5. Lateral deviation acceleration under different global optimization weights
-
[1] BOMBARDELLI C, ALESSI E M, ROSSI A. Reflectance spec-troscopy characterization of space debris[J]. Advances in Space Research, 2017, 59(10): 2488-2500. doi: 10.1016/j.asr.2017.02.033 [2] ZHANG B, WANG Z, ZHANG Y. An analytic method of space debris cloud evolution and its collision evaluation for constellation satellites[J]. Advances in Space Research, 2016, 58(6): 903-913. doi: 10.1016/j.asr.2016.03.016 [3] 苏飞, 刘静, 张耀, 等. 航天器面内机动规避最优脉冲分析[J]. 系统工程与电子技术, 2018, 40(12): 2782-2789. doi: 10.3969/j.issn.1001-506X.2018.12.23SU F, LIU J, ZHANG Y, et al. Analysis of optimal impulse for in-plane collision avoidance maneuver[J]. Systems Engineering and Electronics, 2018, 40(12): 2782-2789(in Chinese). doi: 10.3969/j.issn.1001-506X.2018.12.23 [4] LEE S C, KIM H D, SUK J. Collision avoidance maneuver planning using UA for LEO and UEO satellite maintained in keeping area[J]. International Journal of Aeronautical & Space Sciences, 2012, 13(4): 474-483. [5] 于大腾, 王华, 孙福煜. 考虑潜在威胁区的航天器最优规避机动策略[J]. 航空学报, 2017, 38(1): 281-289.YU D T, WANG H, SUN F Y. Optimal evasive maneuver strategy with potential threatening area being considered[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(1): 281-289(in Chinese). [6] 李学辉. 航天器轨道构型和自主交会对接控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 101-106.LI X H. Research on spacecraft orbital configuration and autonomous rendezvous and docking control method[D]. Harbin: Harbin Institute of Technology, 2018: 101-106(in Chinese). [7] 缪远明, 潘腾. 规避姿态禁区的航天器姿态机动路径规划[J]. 航天器工程, 2015, 24(4): 33-37. doi: 10.3969/j.issn.1673-8748.2015.04.006MIAO Y M, PAN T. Path planning method for space-craft attitude slew to avoid forbidden celestial[J]. Spacecraft Engineering, 2015, 24(4): 33-37(in Chinese). doi: 10.3969/j.issn.1673-8748.2015.04.006 [8] 高鹏, 罗建军. 航天器规避动态障碍物的自适应人工势函数制导[J]. 中国空间科学技术, 2012, 32(5): 1-8.GAO P, LUO J J. Adaptive artificial potential function guidance for dynamic obstacle avoidance of space-craft[J]. Chinese Space Science and Technology, 2012, 32(5): 1-8(in Chinese). [9] 曾祥鑫. 自由漂浮空间机器人路径规划及控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 36-39.ZHEN X X. Research on path planning and control method for free-floating space robot[D]. Harbin: Harbin Institute of Technology, 2018: 36-39(in Chinese). [10] HOWARD T, KELLY A. Optimal rough terrain trajectory generation for wheeled mobile robots[J]. The International Journal of Robotics Research, 2007, 26(2): 141-166. doi: 10.1177/0278364906075328 [11] MONTEMERLO M, BECKER J, BHAT S, et al. Junior: The stanford entry in the urban challenge[J]. Journal of Field Robotics, 2008, 25(9): 569-597. doi: 10.1002/rob.20258 [12] 王沙晶, 陈建业. 基于Frenet坐标系的智能车运动规划研究[J]. 移动电源与车辆, 2019(1): 22-29.WANG S J, CHEN J Y. Motion planning of autonomous vehicle based on Frenet coordinate system[J]. Movable Power Station & Vehicle, 2019(1): 22-29(in Chinese). [13] WERLING M, KAMMEL S, ZIEGLER J, et al. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J]. The International Journal of Robotics Research, 2012, 31(3): 346-359. doi: 10.1177/0278364911423042 [14] 王威, 陈慧岩, 马建昊, 等. 基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪[J]. 兵工学报, 2019, 40(11): 2336-2351. doi: 10.3969/j.issn.1000-1093.2019.11.019WANG W, CHEN H Y, MA J H, et al. Path tracking for intelligent vehicles based on Frenet coordinates and delayed control[J]. Acta Armamentarii, 2019, 40(11): 2336-2351(in Chinese). doi: 10.3969/j.issn.1000-1093.2019.11.019 [15] 龙翔, 高建博, 隗寒冰. 一种自动驾驶汽车系统架构开发与测试验证[J]. 重庆理工大学学报(自然科学), 2019, 33(12): 45-54.LONG X, GAO J B, WEI H B. Development and test validation of a systematic architecture for autonomous vehicle[J]. Journal of Chongqing University of Technology(Natural Science), 2019, 33(12): 45-54(in Chinese). [16] 熊菁, 程文科, 秦子增. 基于Serret-Frenet坐标系的翼伞系统轨迹跟踪控制[J]. 动力学与控制学报, 2005, 3(2): 89-93.XIONG J, CHEN W K, QIN Z Z. Path-following of parafoil system based on Serret-Fremet[J]. Journal of Dynamics and Control, 2005, 3(2): 89-93(in Chinese). [17] 严永锁. 基于反馈-滑模策略的水面无人艇路径跟踪控制[D]. 哈尔滨: 哈尔滨工程大学, 2019: 58-61.YAN Y S. Path tracking control of unmanned surface vehicles based on feedback-sliding mode strategy[D]. Harbin: Harbin Engineering University, 2019: 58-61(in Chinese). [18] 赵宁宁, 徐德民, 高剑, 等. 基于Serret-Frenet坐标系的多AUV编队路径跟踪控制[J]. 鱼雷技术, 2015, 23(1): 35-39. doi: 10.3969/j.issn.1673-1948.2015.01.008ZHAO N N, XU D M, GAO J, et al. Formation path following control of multiple AUVs based on Serret-Frenet coordinate system[J]. Torpedo Technology, 2015, 23(1): 35-39(in Chinese). doi: 10.3969/j.issn.1673-1948.2015.01.008 [19] 王华, 韩璐, 楚世理, 等. 基于Frenet标架下三维元胞自动机的航母舰载机集群运动建模[J]. 计算机辅助设计与图形学学报, 2018, 30(9): 1719-1727.WANG H, HAN L, CHU S L, et al. Shipboard aircraft swarm modeling using a 3D cellular automata model under the Frenet frame[J]. Journal of Computer-Aided Design & Computer Graphics, 2018, 30(9): 1719-1727(in Chinese). [20] 丁家如, 杜昌平, 赵耀, 等. 基于改进人工势场法的无人机路径规划算法[J]. 计算机应用, 2016, 36(1): 287-290.DING J R, DU C P, ZHAO Y, et al. Path planning algorithm for unmanned aerial vehicles based on improved artificial potential field[J]. Journal of Computer Applications, 2016, 36(1): 287-290(in Chinese). [21] 杨丽春, 顾颖彦, 白宇. 基于改进人工势场法的无人机在线航路规划算法[J]. 电子技术应用, 2018, 44(4): 5-9.YANG L C, GU Y Y, BAI Y. UAV's online route planning algorithm based on improved artificial po-tential field[J]. Application of Electronic Technique, 2018, 44(4): 5-9(in Chinese). [22] 何仁珂, 魏瑞轩, 张启瑞, 等. 基于拟态电势能的飞行器航路规划方法[J]. 北京航空航天大学学报, 2016, 42(7): 1543-1549. doi: 10.13700/j.bh.1001-5965.2015.0430HE R K, WEI R X, ZHANG Q R, et al. Mimetism electric potential energy motion planning algorithm for aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1543-1549(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0430 [23] LUGO C I, FLORES G, SALAZA R S, et al. Dubins path generation for a fixed wing UAV[C]//International Conference on Unmanned Aircraft Systems(ICUAS). Piscataway: IEEE Press, 2014: 339-346. [24] 尚璞. 旋翼无人机路径规划与自主避障控制系统研究[D]. 西安: 西安科技大学, 2019: 89-93.SHANG P. Research on path planning arid autono-mous obstacle avoidance control system of quad-rotor[D]. Xi'an: Xi'an University of Science and Technology, 2019: 89-93(in Chinese). [25] 张大志, 刘万辉, 缪存孝, 等. 全向移动机器人动态避障方法研究[J]. 北京航空航天大学学报, (2020-07-13)[2020-07-28]. https://doi.org/10.13700/j.bh.1001-5965.2020-0155.ZHANG D Z, LIU W H, MIAO C X, et al. Dynamic obstacle avoidance method for omnidirectional mobile robots[J]. Journal of Beijing University of Aeronautics and Astronautics, (2020-07-13)[2020-07-28]. https://doi.org/10.13700/j.bh.1001-5965.2020-0155(in Chinese). [26] 贾正荣, 王航宇, 卢发兴. 基于障碍凸化的改进环流APF路径规划[J]. 航空学报, 2019, 40(10): 323189.JIA Z R, WANG H Y, LU F X. Improved circulating APF route planning based on obstacle convexifica-tion[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(10): 323189(in Chinese). [27] 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. doi: 10.3969/j.issn.1000-1093.2019.03.025CHEN T D, HUANG Y Y, SHEN W. Non-oscillation path planning pased on virtual obstacle method[J]. Acta Armamentarii, 2019, 40(3): 651-658(in Chinese). doi: 10.3969/j.issn.1000-1093.2019.03.025 [28] MOHANAN M G, SALGOANKA R A. A survey of robotic motion planning in dynamic environments[J]. Robotics & Autonomous Systems, 2018, 100: 171-185. [29] 钱宇, 徐敏, 郭东, 等. 航天器短期规避路径规划研究[J]. 飞行力学, 2010, 28(5): 67-70.QIAN Y, XU M, GUO D, et al. Route planning for spacecraft collision avoidance maneuver with short-term encounters[J]. Flight Dynamics, 2010, 28(5): 67-70. [30] 于大腾. 航天器反交会规避机动方法研究[D]. 长沙: 国防科学技术大学, 2013: 48-56.YU D T. Research on spacecraft anti-rendezvous evasion maneuver method[D]. Changsha: Graduate School of National University of Defense Technology, 2013: 48-56(in Chinese). [31] 王沙晶. 基于Frenet坐标系采样的自动驾驶轨迹规划算法研究[D]. 兰州: 兰州理工大学, 2019: 44-48.WANG S J. Research of trajectory planning for autonomous driving based frenet coordinate and sampling[D]. Lanzhou: Lanzhou University of Technology, 2019: 44-48(in Chinese). [32] JURE B, MARIJAN H, IVAN R, et al. Trajectory planning for autonomous vehicle using digital map[C]//IEEE International Conference on Vehicular Electronics 2019 Zooming Innovation in Consumer Technologies. Piscataway: IEEE Press, 2019: 136-142. [33] FASSBENDER D, HEINRICH B C, WUENSCHE H J. Motion planning for autonomous vehicles in highly constrained urban environments[C]//International Conference on Intelligent Robots and Systems (IROS), 2016: 4708-4713. [34] WERLING M, ZIEGLER J, SÖREN K, et al. Optimal trajectory generation for dynamic street scenarios in a frenet frame[J]. Robotics & Automation, 2010, 4(5): 5-6. [35] 张玉. 自动驾驶车辆混合运动规划研究[D]. 北京: 北京理工大学, 2018: 98-104.ZHANG Y. Hybrid motion planning for autonomous vehicles[D]. Beijing: Beijing Institute of Technology, 2018: 98-104(in Chinese). [36] 王文彬, 秦小林, 张力戈, 等. 基于滚动时域的无人机动态航迹规划[J]. 智能系统学报, 2018, 13(4): 524-533.WANG W B, QIN X L, ZHANG L G, et al. Dynamic UAV trajectory planning based on receding horizon[J]. CAAI Transactions on Intelligent Systems, 2018, 13(4): 524-533(in Chinese). [37] HUANG Z C, WU Q, MA J, et al. An APF and MPC combined collaborative driving controller using vehicular communication technologies[J]. Chaos, Solitons & Fractals, 2016, 89: 232-242. [38] 范世鹏, 祁琪, 路坤锋, 等. 基于改进人工势场法的巡航导弹自主避障技术[J]. 北京理工大学学报, 2018, 38(8): 828-834.FAN S P, QI Q, LU K F, et al. Autonomous collision avoidance technique of cruise missiles based on modified artificial potential method[J]. Transactions of Beijing Institute of Technology, 2018, 38(8): 828-834(in Chinese). [39] 张相宇. 特定推力方向约束下的航天器轨道最优控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.ZHANG X Y. Research on optimal orbit control of spacecraft with specific thrust direction[D]. Harbin: Harbin Institute of Technology, 2016(in Chinese). [40] 崔红正, 刘文玲, 唐歌实, 等. 不同推力下的非合作空间目标轨道机动检测[J]. 宇航学报, 2016, 37(3): 253-261. doi: 10.3873/j.issn.1000-1328.2016.03.002CUI H Z, LIU W L, TANG G S, et al. Different thrust maneuvers detection of uncooperative space objects[J]. Journal of Astronautics, 2016, 37(3): 253-261(in Chinese). doi: 10.3873/j.issn.1000-1328.2016.03.002 [41] 张晨, 赵育善. 混合推进最省燃料轨道设计方法[J]. 宇航学报, 2015, 36(8): 869-876. doi: 10.3873/j.issn.1000-1328.2015.08.002ZHANG C, ZHAO Y S. A method for hybrid propul-sion minimum fuel trajectory optimization[J]. Journal of Astronautics, 2015, 36(8): 869-876(in Chinese). doi: 10.3873/j.issn.1000-1328.2015.08.002 [42] 周婷. 空间交会接近段联合机动及燃料优化问题研究[D]. 北京: 清华大学, 2010: 88-93.ZHOU T. Study on joint maneuver and fuel optimization in approach phase for space rendezvous[D]. Beijing: Tsinghua University, 2010: 88-93(in Chinese). [43] TAKAHASHI A, HONGO T, NINOMIYA Y, et al. Local path planning and motion control for AGV in positioning[C]//Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots & Systems. Piscataway: IEEE Press, 1989: 392-397. [44] DIJKSTRA E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1(1): 269-271. doi: 10.1007/BF01386390 [45] 吴红波, 王英杰, 杨肖肖. 基于Dijkstra算法优化的城市交通路径分析[J]. 北京交通大学学报, 2019, 43(4): 116-121.WU H B, WANG Y J, YANG X X. Analysis of urban traffic vehicle routing based on Dijkstra algorithm optimization[J]. Journal of Beijing Jiaotong University, 2019, 43(4): 116-121(in Chinese). [46] 张菁, 何友, 彭应宁, 等. 基于神经网络和人工势场的协同博弈路径规划[J]. 航空学报, 2019, 40(3): 322493.ZHANG J, HE Y N, PENG Y, et al. Neural network and artificial potential field based cooperative and adversarially path planning[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(3): 322493(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1032
- HTML全文浏览量: 285
- PDF下载量: 141
- 被引次数: 0
