



-
摘要:
针对单滑块滚控式变质心飞行器的欠驱动问题,提出基于自抗扰思想的控制器,利用横向配置单滑块实现指令滚转角跟踪和侧滑角镇定控制。应用质点系动量矩定理建立了系统姿态动力学模型,分析表明,滚转和偏航通道拥有同一控制输入,且存在滑块惯性和运动耦合,滑块横向偏移会影响偏航通道。为此,设计自抗扰控制(ADRC)器进行滚偏耦合控制,将模型误差、滑块耦合和不确定干扰视作总和扰动,对滚转角跟踪子系统和侧滑角镇定子系统同时进行状态观测和总和扰动动态补偿,该控制器能够较好地抵抗系统内外干扰,且结构简单、易于实现。摄动仿真结果验证了所提控制器的有效性和鲁棒性。
-
关键词:
- 变质心控制(MMC) /
- 再入飞行器 /
- 欠驱动系统 /
- 自抗扰控制(ADRC) /
- 耦合非线性
Abstract:Considering the underactuated problem of flight vehicles with single moving mass roll control system, this paper proposes a controller based on the idea of active disturbance rejection, which achieves the command roll angle tracking and sideslip angle stabilization control only with the laterally configured single moving mass. The system attitude dynamics is modeled based on the momentum theorem of particle system, analysis shows that the roll and yaw channels share the same control input and are coupled by moving mass inertial and movement terms, and the lateral offset of the moving mass will impact the yaw channel. Therefore, an Active Disturbance Rejection Controller (ADRC) is designed to deal with the roll-yaw coupling control problem, where the modeling error, moving mass coupling and uncertainties are regarded as total disturbances, and extended state observation and dynamic compensation of total disturbances for both the roll angle control and sideslip angle stabilization subsystems are conducted, the controller with simple structure is easy to implement and it is capable of resisting both internal and external disturbances. Finally, the effectiveness and robustness of the proposed controller are verified by numerical simulations with perturbations.
-

图 1 单滑块滚控式变质心飞行器示意图
Figure 1. Sketch map of flight vehicle with single movingmass roll control
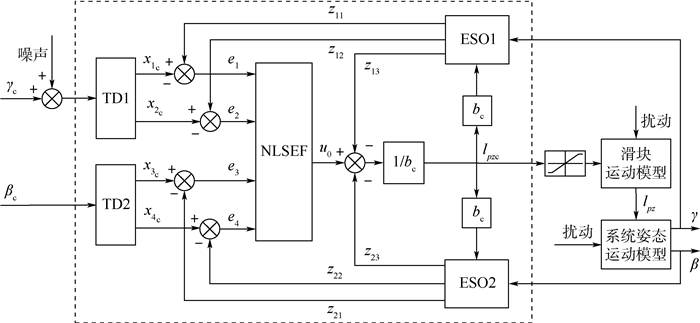
图 2 变质心耦合欠驱动自抗扰控制框图
Figure 2. Block diagram of ADRC-based moving mass coupling underactuated control
-
[1] LI J Q, GAO C S, LI C Y, et al. A survey on moving mass control technology[J]. Aerospace Science and Technology, 2018, 82-83: 594-606. doi: 10.1016/j.ast.2018.09.033 [2] ROBINETT R D, STURGIS B R, KERR S A. Moving mass trim control for aerospace vehicles[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(5): 1064-1070. doi: 10.2514/3.21746 [3] ROGERS J, COSTELLO M. Control authority of a projectile equipped with a controllable internal translating mass[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1323-1333. doi: 10.2514/1.33961 [4] MENON P K, SWERIDUK G D, OHLMEYER E J, et al. Integrated guidance and control of moving mass actuated kinetic war-heads[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 118-126. doi: 10.2514/1.9336 [5] VADDI S, MENON P K, OHLMEYER E J. Numerical state-dependent riccati equation approach for missile integrated guidance control[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 699-703. doi: 10.2514/1.34291 [6] 高长生, 荆武兴, 李君龙. 导弹质量矩控制技术发展综述[J]. 宇航学报, 2010, 31(2): 307-323.GAO C S, JING W X, LI J L, et al. Key technique and development for moving mass actuated kinetic missile[J]. Journal of Astronautics, 2010, 31(2): 307-323(in Chinese). [7] 廖国兵, 于本水, 杨宇光. 质量矩控制技术的机理分析及方程简化研究[J]. 系统工程与电子技术, 2004, 26(11): 1635-1639.LIAO G B, YU B S, YANG Y G. Study on the theory and simplified equations of mass moment control missile[J]. Systems Engineering and Electronics, 2004, 26(11): 1635-1639(in Chinese). [8] 林鹏, 周凤岐, 周军. 基于变质心控制方式的再入弹头控制模式研究[J]. 航天控制, 2007, 25(2): 16-20.LIN P, ZHOU F Q, ZHOU J. Moving centroid control mode for reentry warhead[J]. Aerospace Control, 2007, 25(2): 16-20(in Chinese). [9] 易彦, 周凤岐, 周军. 基于变质心控制导弹的运动分析[J]. 航天控制, 2000, 18(3): 1-5.YI Y, ZHOU F Q, ZHOU J. Motion analysis on moving center of mass controlled missile[J]. Aerospace Control, 2000, 18(3): 1-5(in Chinese). [10] LI J Q, CHEN S, LI C Y, et al. Adaptive control of underactuated flight vehicles with moving mass[J]. Aerospace Science and Technology, 2019, 85: 75-84. doi: 10.1016/j.ast.2018.12.003 [11] LIU Z T, GAO C S, LI J Q, et al. Closed-loop bifurcation analysis for a novel moving mass flight vehicle[J]. International Journal of Aeronautical and Space Sciences, 2018, 19(4): 962-975. doi: 10.1007/s42405-018-0082-7 [12] 秦莉, 杨明, 郭庆. 遗传算法在质量矩导弹姿态控制中的应用[J]. 北京航空航天大学学报, 2007, 33(7): 769-772. https://bhxb.buaa.edu.cn/CN/Y2007/V33/I07/769QIN L, YANG M, GUO Q. Moving-mass attitude control law based on genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(7): 769-772(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2007/V33/I07/769 [13] 王松艳, 杨明, 王子才. 旋转弹的神经网络变质心姿态控制[J]. 北京航空航天大学学报, 2006, 32(8): 962-965. https://bhxb.buaa.edu.cn/CN/Y2006/V32/I08/962WANG S Y, YANG M, WANG Z C. Moving-mass attitude control system for spinning vehicles based on neural networks[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(8): 962-965(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2006/V32/I08/962 [14] LI G L, CHAO T, WANG S Y, et al. Integrated guidance and control for the fixed-trim vehicle against the maneuvering target[J]. International Journal of Control, Automation, and Systems, 2020, 18(6): 1518-1529. doi: 10.1007/s12555-018-0824-0 [15] DONG K X, ZHOU J, ZHOU M, et al. Roll control for single moving-mass actuated fixed-trim reentry vehicle considering full state constraints[J]. Aerospace Science and Technology, 2019, 94: 1-14. [16] NI K, WANG Z B, ZHANG Q Z, et al. Antiwindup spinning guidance for fixed-trim entry vehicles by active disturbance rejection control[J]. Journal of Spacecraft and Rockets, 2019, 56(4): 1092-1106. doi: 10.2514/1.A34240 [17] PETSOPOULOS T, REGAN F J, BARLOW J. Moving-mass roll control system for fixed trim re-entry vehicle[J]. Journal of Spacecraft and Rockets, 1996, 33(1): 54-60. doi: 10.2514/3.55707 [18] 王林林, 于剑桥, 王亚飞, 等. 单滑块变质心非对称再入飞行器建模及控制[J]. 系统工程与电子技术, 2015, 37(5): 1116-1123.WANG L L, YU J Q, WANG Y F, et al. Single moving-mass asymmetrical reentry vehicle modeling and control[J]. Systems Engineering and Electronics, 2015, 37(5): 1116-1123(in Chinese). [19] SU X L, YU J Q, WANG Y F, et al. Moving mass actuated reentry vehicle control based on trajectory linearization[J]. International Journal of Aeronautical and Space Sciences, 2013, 14(3): 247-255. doi: 10.5139/IJASS.2013.14.3.247 [20] 李自行, 李高风. 移动质心再入飞行器建模及自抗扰滚动控制[J]. 航空学报, 2012, 33(11): 2121-2129.LI Z X, LI G F. Moving centroid reentry vehicle modeling and active disturbance rejection roll control[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(11): 2121-2129(in Chinese). [21] 范一迪, 荆武兴, 高长生, 等. 滚控式变质心飞行器动力学特性分析与控制[J]. 宇航学报, 2019, 40(4): 386-395.FAN Y D, JING W X, GAO C S, et al. Analysis of dynamics characteristics and control of a flight vehicle with a moving-mass roll control system[J]. Journal of Astronautics, 2019, 40(4): 386-395(in Chinese). [22] OLFATI-SABER R. Normal forms for underactuated mechanical systems with symmetry[J]. IEEE Transactions on Automatic Control, 2002, 47(2): 305-308. doi: 10.1109/9.983365 [23] HUSSEIN I I, BLOCH A M. Optimal control of underactuated nonholonomic mechanical systems[J]. IEEE Transactions on Automatic Control, 2008, 53(3): 668-682. doi: 10.1109/TAC.2008.919853 [24] HU G, DIXON W E, MAKKAR C. Energy-based nonlinear control of underactuated Euler-Lagrange systems subject to impacts[J]. IEEE Transactions on Automatic Control, 2007, 52(9): 1742-1748. doi: 10.1109/TAC.2007.904319 [25] HAN J Q. From pid to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. doi: 10.1109/TIE.2008.2011621 [26] SUN M W, WANG Z H, WANG Y K, et al. On low-velocity compensation of brushless DC servo in the absence of friction model[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3897-3905. doi: 10.1109/TIE.2012.2208434 [27] XIA Y Q, ZHU Z, FU M Y, et al. Attitude tracking of rigid spacecraft with bounded disturbances[J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 647-659. doi: 10.1109/TIE.2010.2046611 [28] SU J B, MA H Y, QIU W B, et al. Task-independent robotic uncalibrated hand-eye coordination based on the extended state observer[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2004, 34(4): 1917-1922. doi: 10.1109/TSMCB.2004.827615 [29] LI C Y, JING W X, GAO C S. Adaptive backstepping-based flight control system using integral filters[J]. Aerospace Science and Technology, 2009, 13: 105-113. doi: 10.1016/j.ast.2008.05.002 [30] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 243-280.HAN J Q. Active disturbance rejection control technique-The technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 243-280(in Chinese). [31] BERGH F V D, ENGELBRECHT A P. A study of particle swarm optimization particle trajectories[J]. Information Sciences, 2006, 176(8): 937-971. doi: 10.1016/j.ins.2005.02.003 期刊类型引用(2)
1. 李卓轩,沙云东,骆丽. 涡轮叶片气热耦合壁温及压力分布计算与分析. 沈阳航空航天大学学报. 2024(01): 1-8 .  百度学术
百度学术2. 宋洋,王威,耿瑞,罗磊,周海盟. 基于涡轮导叶复合结构设计平台的叶片强度分析技术. 汽轮机技术. 2023(02): 81-86 . 百度学术其他类型引用(4)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 1237
- HTML全文浏览量: 89
- PDF下载量: 87
- 被引次数: 6
