



-
摘要:
四旋翼飞行器(QUAV)的位置、姿态运动控制效果决定了其机动性。为了克服四旋翼系统欠驱动的缺陷,基于四元数表达对一种双向电机驱动的四旋翼进行了动力学建模,包括双向推力作用情况下的全向运动过程分析,并提出了一种姿态与位置控制器及控制分配矩阵设计方法。面向四旋翼的
x -z 平面模型,设定合理的参数和限制,使用最优规划方法提出了适用于新型四旋翼翻转、竖直等机动飞行轨迹的生成方法,其中推力与转矩都是实现时间最短的最优方案。搭建了包括电子调速器、电机、桨叶、机架等部件在内的详细的仿真试验环境。仿真试验的结果验证了双向电机驱动的四旋翼相比于传统四旋翼,能有效提高姿态跟踪与位置跟踪的精度,提升了飞行器的机动性。-
关键词:
- 四旋翼飞行器(QUAV) /
- 四元数建模 /
- 机动性 /
- 双向推力 /
- 轨迹规划
Abstract:The position and attitude control of Quadrotor Unmanned Aerial Vehicle (QUAV) determines its maneuverability. First, to overcome the mobility defect of the under-actuated system, the dynamic model of bi-directional-motor-driven QUAV based on quaternion is presented, including the analysis on omnidirectional movement process. The attitude and position controllers and QUAV's control allocation matrix are illustrated. Then, considering the vertical
x -z plane model custom-built for the new QUAV, the optimal planning tool is used to propose the maneuvering flight trajectory generation method suitable for QUAV by setting reasonable parameters and restrictions. The trajectories are produced but not limited within flip, vertical roll and point-to-point. The thrust and torque outputs are optimal to achieve rapidity under the conditions above. Finally, a QUAV simulation environment with circuit, electronic speed controllers, motors, blades and frames is established. By evaluating the results of simulation, this paper demonstrates that compared with unidirectional-rotor-driven QUAV, the bi-directional-motor-driven one effectively improves the accuracy of attitude and position tracking and promotes maneuverability. -

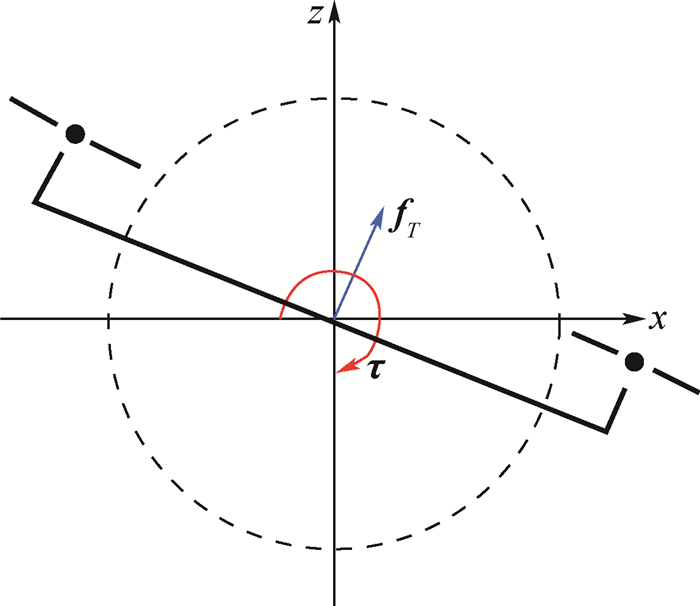
图 1 机体坐标系重心到电机中心的坐标变换
Figure 1. Coordinate transformation from the center of gravity axis to the center of motor axis
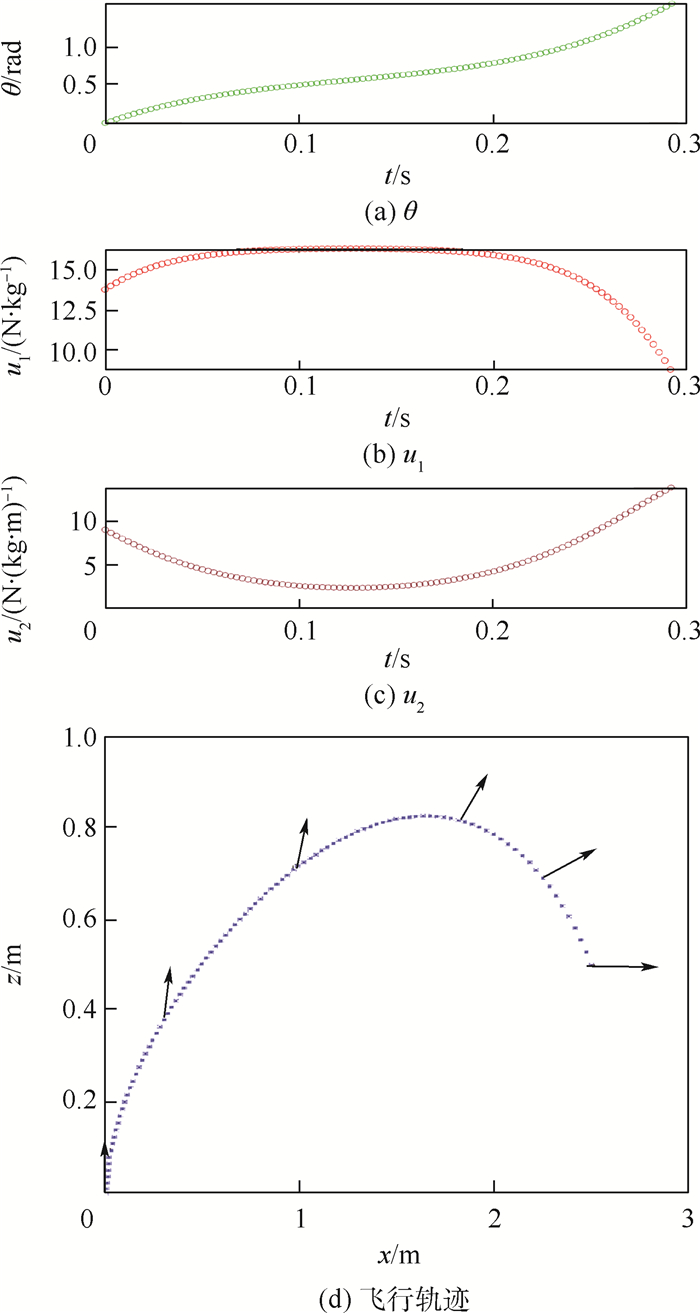
图 7 点到竖直悬停的θ、u1、u2及飞行轨迹
Figure 7. Trajectory graph of point-vertical hover with θ, u1, u2
表 1 系统参数与状态、输入限制
Table 1. System parameters, status and input limits
系统参数 状态限制 输入限制 m=0.5 kg
J=3×10-3 kg·m2
g=9.81 m/s2
T=12 N
T=1 N
τ=0.2 N·m
τ=-0.2 N·m 下载: 导出CSV
下载: 导出CSV
表 2 三个典型机动设计
Table 2. Design of three typical maneuvers
机动 中间条件 结束条件 点到点 无 pf=[xg zg 0]T
ṗf=[0 0 0]T点到竖直悬停 无 
ṗf=[0 0 0]T翻转 
pf=[xg 0 π]T
ṗf=[0 0 0]T
下载: 导出CSV
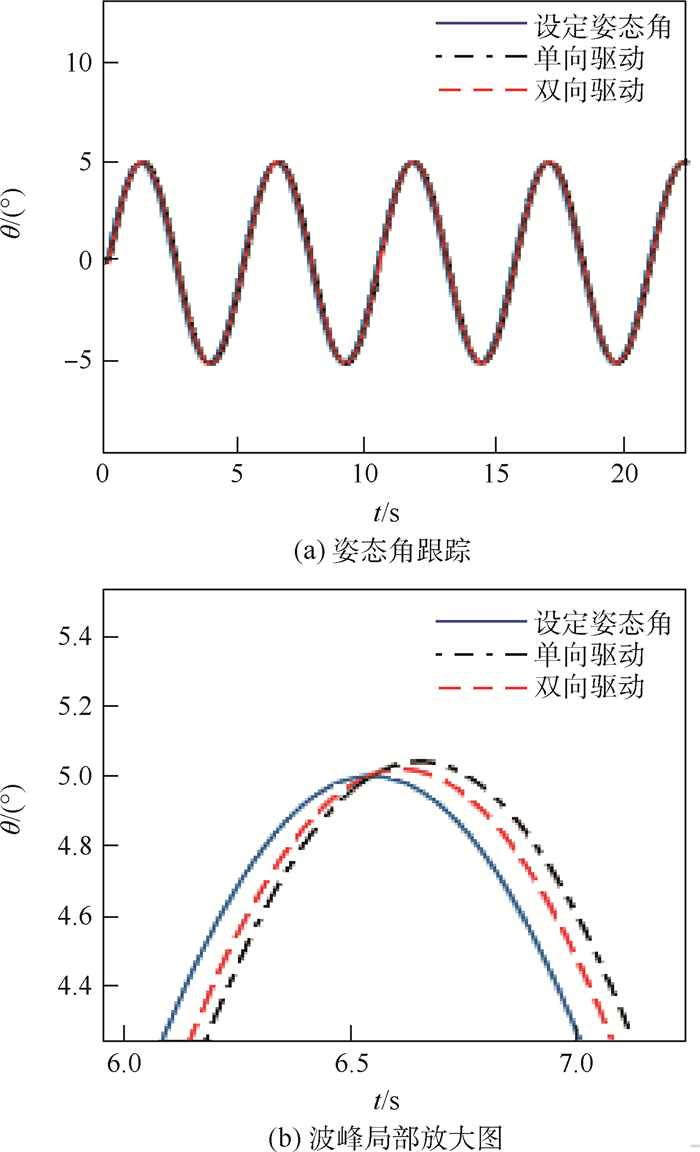
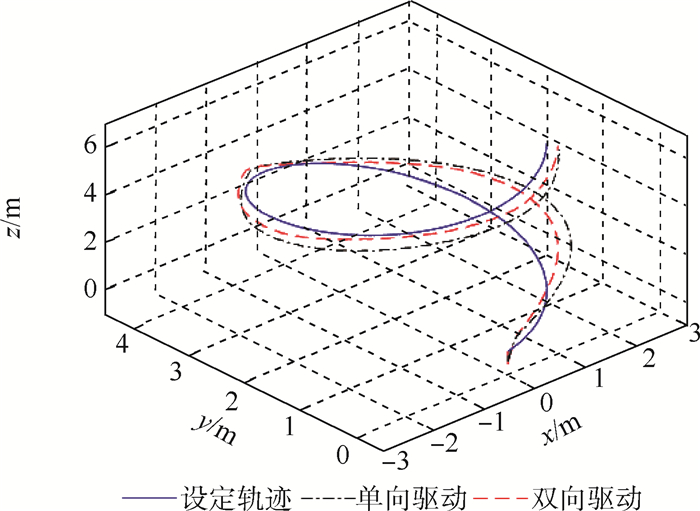
表 3 两种模型与目标螺旋曲线轨迹之间误差的方差
Table 3. Variance of errors between two models and target spiral trajectory
三轴目标轨迹函数 单向驱动 双向驱动 x(t)=2sin(0.1t) 0.153 8 0.100 9 y(t)=-2cos(0.1t) 0.062 0 0.014 8 z(t)=0.1t 0.009 0 0.007 4
下载: 导出CSV
-
[1] CUTLER M, HOW J P. Analysis and control of a variable-pitch quadrotor for agile flight[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(10): 101002. doi: 10.1115/1.4030676 [2] GUPTA N, KOTHARI M.Flight dynamics and nonlinear control design for variable-pitch quadrotors[C]//2016 American Control Conference.Piscataway: IEEE Press, 2016: 3150-3155. [3] PAULOS J, YIM M.Flight performance of a swashplateless micro air vehicle[C]//2015 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2015: 5284-5289. [4] PAULOS J, YIM M. Cyclic blade pitch control without a swashplate for small helicopter[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(3): 689-700. doi: 10.2514/1.G002683 [5] BRESCIANINI D, D'ANDREA R.Design, modeling and control of an omni-directional aerial vehicle[C]//2016 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2016: 3261-3266. [6] JIANG G, VOYLES R.Hexrotor UAV platform enabling dextrous interaction with structures-flight test[C]//2013 IEEE International Symposium on Safety, Security, and Rescue Robotics.Piscataway: IEEE Press, 2013: 14046745. [7] RYLL M. 6D interaction control with aerial robots: The flying end-effector paradigm[J]. International Journal of Robotics Research, 2019, 38(9): 1045-1062. doi: 10.1177/0278364919856694 [8] TOMIC T, OTT C, HADDADIN S. External wrench estimation, collision detection, and reflex reaction for flying robots[J]. IEEE Transactions on Robotics, 2017, 33(6): 1467-1482. doi: 10.1109/TRO.2017.2750703 [9] KUIPERS J.Quaternions and rotation sequences: A primer with applications to orbits, aerospace, and virtual reality[M].[S.l.]: Princeton University Press, 2002. [10] LUPASHIN S, SCHOELLIG A, SHERBACK M, et al.A simple learning strategy for high-specd quadrocopter multi-flips[C]//International Conference on Robotics and Automation.Piscataway: IEEE Press, 2010: 1642-1648. [11] FAESSLER M, FRANCHI A, SCARAMUZZA D. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 620-626. doi: 10.1109/LRA.2017.2776353 [12] YU Y, YANG S, WANG M, et al.High performance full attitude control of a quadrotor on SO(3)[C]//2015 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2015: 1698-1703. [13] HAMEL T, MAHONY R.Dynamic modelling and configuration stabilization for an x4-flyer[C]//15th Triennial World Congress, 2002: 217-222. [14] GILLULA J, HUANG H, VITUS M, et al.Design of guaranteed safe maneuvers using reachable sets: Autonomous quadrotor aerobatics in theory and practice[C]//2010 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2010: 1649-1654. [15] DARBY C, HAGER W, RAO A. An hp-adaptive pseudospectral method for solving optimal control problems[J]. Optimal Control Applications and Methods, 2010, 32(4): 476-502. doi: 10.1002/oca.957 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 1030
- HTML全文浏览量: 65
- PDF下载量: 61
- 被引次数: 0
