



Novel damping-variable sliding mode cascade control for electro-hydrostatic actuator
-
摘要:
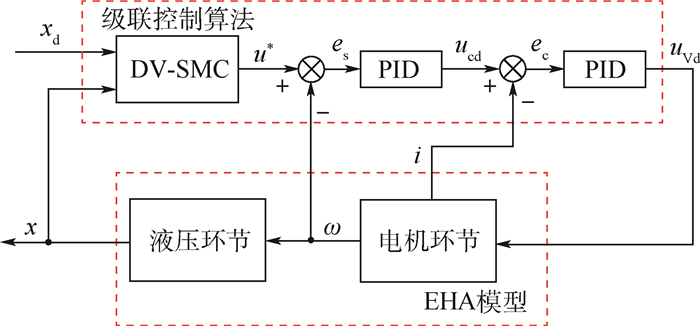
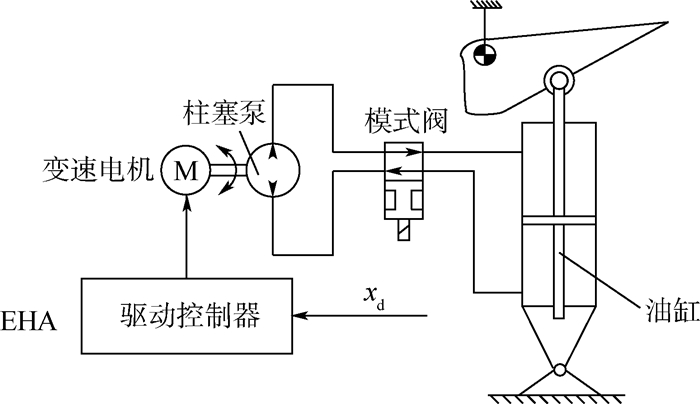
为改善电动静液作动器(EHA)的动态性能,提出了一种基于新型准自适应变阻尼滑模控制(DV-SMC)和PID控制的级联控制(CC)算法。所提算法将高阶EHA分为液压和机械2个低阶系统,分别对2个低阶系统采用了DV-SMC和双环PID控制策略。DV-SMC方法能够自适应调整滑模面阻尼。在起始阶段采用欠阻尼、末段自适应调节为过阻尼,从而在保证EHA快速性的同时也能够完全抑制超调现象。通过仿真验证了所提算法的有效性,并讨论给出了DV-SMC滑模面最优参数。
-
关键词:
- 滑模控制(SMC) /
- 准自适应 /
- 变阻尼 /
- 电动静液作动器(EHA) /
- 级联控制(CC)
Abstract:Aimed at improving the performance of an Electro-Hydrostatic Actuator (EHA), a novel Cascade Control (CC) algorithm based on Damping-Variable Sliding Mode Control (DV-SMC) and PID is proposed in this paper. A high-order model of EHA was divided into two low-order subsystems, i.e. mechanical subsystem and hydraulic subsystem. Furthermore, double-loop PID and DV-SMC were applied for the two subsystems, respectively. The proposed method can adjust the damping ratio of the subsystem adaptively. At the beginning of sliding, small damping ratio was used, while an overdamped subsystem was obtained in the end by adaptive adjustment. Therefore, the EHA rapidness and the suppression of overshoot can be guaranteed simultaneously. Finally, simulative validation was carried out to verify the effectiveness of the proposed method, and the optimal parameters of the sliding mode surface are discussed and given.
-

图 2 阻尼比的影响随敏感因子变化示意图
Figure 2. Schematic diagram of damping ratio influence changing with sensitivity factor

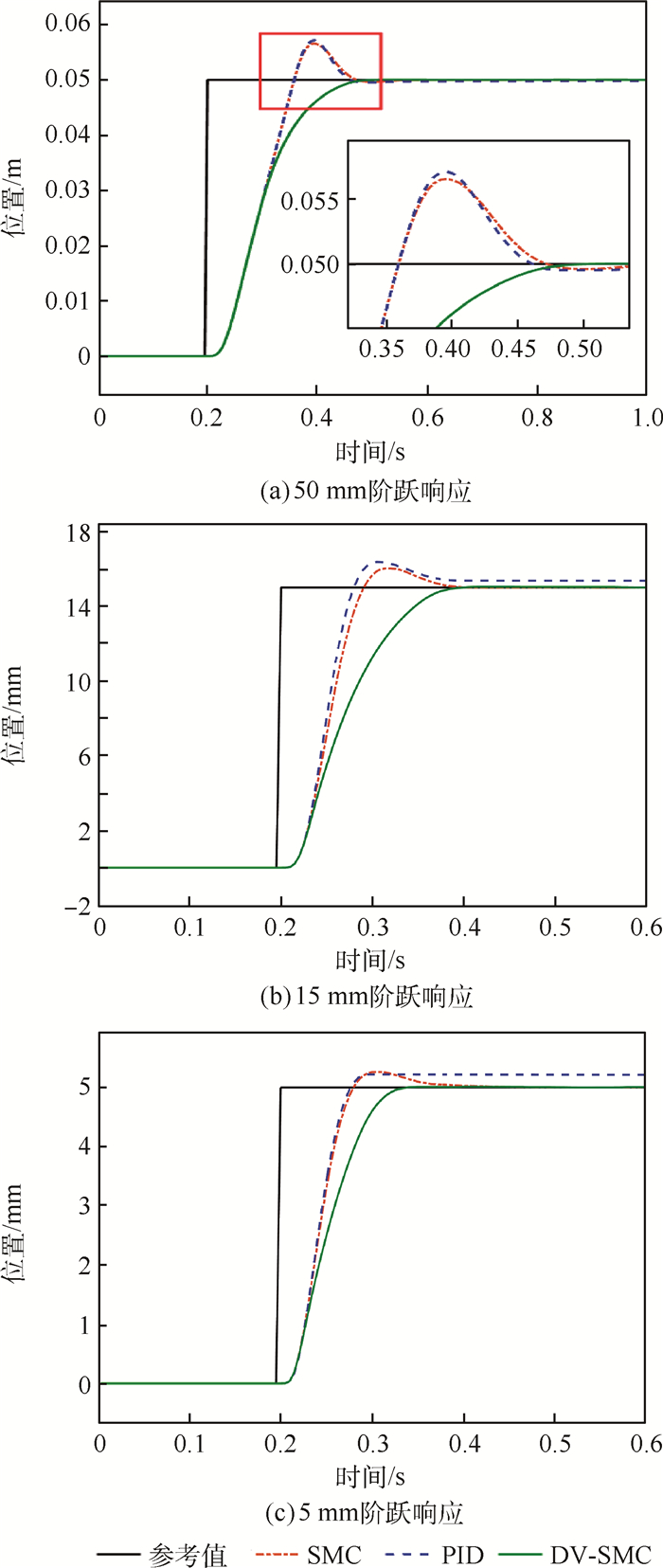
图 5 15 mm阶跃EHA控制量输入仿真结果
Figure 5. Simulation results of EHA control input with 15 mm step signal
表 1 EHA模型参数
Table 1. Parameters of EHA model
参数 数值 活塞有效面积A/m2 1.134×10-3 有效行程/m 0.1 油缸内泄系数Lc/(m3·(s·Pa-1)-1) 2.5×10-11 油液弹性模量βe/(N·m-2) 6.86×108 容腔有效体积V0/m3 4×10-4 油缸黏性摩擦系数Bc/(N·(m·s-1)-1) 1 000 油缸及负载质量M/kg 243 柱塞泵排量Dp/(m3·rad-1) 3.98×10-7 电机黏性摩擦系数Bm/(N·m·(rad·s-1)-1) 6×10-4 线电阻R/Ω 0.2 线电感L/mH 1.33 柱塞泵和电机转动惯量Ja/(kg·m2) 4×10-4 电机扭矩系数Kt/(N·m·A-1) 0.351 反电动势系数Ke/(V·(rad·s-1)-1) 0.234 弹性负载系数Ks/(N·m-1) 8×108 母线电压/VDC 270  下载: 导出CSV
下载: 导出CSV
-
[1] QI H T, FU Y L, QI X Y, et al. Architecture optimization of more electric aircraft actuation system[J]. Chinese Journal of Aeronautics, 2011, 24(4): 506-513. doi: 10.1016/S1000-9361(11)60058-7 [2] MARE J, FU J. Review on signal-by-wire and power-by-wire actuation for more electric aircraft[J]. Chinese Journal of Aeronautics, 2017, 30(3): 857-870. doi: 10.1016/j.cja.2017.03.013 [3] ALLE N, HIREMATH S S, MAKARAM S, et al. Review on electro hydrostatic actuator for flight control[J]. International Journal of Fluid Power, 2016, 17(2): 125-145. doi: 10.1080/14399776.2016.1169743 [4] NAVATHAA A, BELLADA K, HIREMATHA S S, et al. Dynamic analysis of electro hydrostatic actuation system[J]. Procedia Technology, 2016, 25: 1289-1296. doi: 10.1016/j.protcy.2016.08.223 [5] YAO Z K, YAO J Y, YAO F Y, et al. Model reference adaptive tracking control for hydraulic servo systems with nonlinear neural-networks[J]. ISA Transactions, 2019, 100: 396-404. [6] WANG C W, QUAN L, JIAO Z X, et al. Nonlinear adaptive control of hydraulic system with observing and compensating mismatching uncertainties[J]. IEEE Transactions on Control Systems Technology, 2018, 26(3): 927-937. doi: 10.1109/TCST.2017.2699166 [7] 寇荣发. EHA汽车电控主动悬架的模糊控制实验[J]. 西安科技大学学报, 2009, 29(5): 589-594. doi: 10.3969/j.issn.1672-9315.2009.05.017KOU R F. Test on fuzzy control for vehicle active suspension with EHA[J]. Journal of Xi'an University of Science and Technology, 2009, 29(5): 589-594(in Chinese). doi: 10.3969/j.issn.1672-9315.2009.05.017 [8] 张振, 李海军, 诸德放. EHA反馈线性化最优滑模面双模糊滑模控制[J]. 北京航空航天大学学报, 2016, 42(7): 1398-1405. doi: 10.13700/j.bh.1001-5965.2015.0454ZHANG Z, LI H J, ZHU D F. Double fuzzy sliding mode control for EHA based on feedback linearization optimal sliding surface[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1398-1405(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0454 [9] YANG R R, FU Y L, ZHANG L, et al. A novel sliding mode control framework for electrohydrostatic actuator[J]. Mathematical Problems in Engineering, 2018(11): 1-22. [10] ALEMU A E, FU Y L. Sliding mode control of electro-hydrostatic actuator based on extended state observer[C]//29th Chinese Control and Decision Conference. Piscataway: IEEE Press, 2017: 758-763. [11] WANG S, HABIBI S, BURTON R. Sliding mode control for an electrohydraulic actuator system with discontinuous non-linear friction[J]. Journal of Systems and Control Engineering, 2008, 222(8): 799-815. [12] SOON C C, GHAZALI R, JAAFAR H I, et al. Sliding mode controller design with optimized PID sliding surface using particle swarm algorithm[J]. Procedia Computer Science, 2017, 105: 235-239. doi: 10.1016/j.procs.2017.01.216 [13] 张英臣, 祁晓野. 基于PID和滑模控制的电动静液作动器的研究[J]. 机床与液压, 2017, 45(21): 122-126.ZHANG Y C, QI X Y. Study of electro-hydraulic actuator based on PID and sliding mode control[J]. Machine Tool & Hydraulics, 2017, 45(21): 122-126(in Chinese). [14] AHN K K, NAM D N C, JIN M L. Adaptive backstepping control of an electrohydarulic actuator[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 987-995. doi: 10.1109/TMECH.2013.2265312 [15] REN G G, ESFANDIARI M, SONG J C, et al. Position control of an electrohydrostatic actuator with tolerance to internal leakage[J]. IEEE Transactions on Control Systems Technology, 2016, 24(6): 2224-2232. doi: 10.1109/TCST.2016.2517568 [16] ZHANG H, LIU X T, WANG J M, et al. Robust H∞ sliding mode control with pole placement for a fluid power electrohydraulic actuator (EHA) system[J]. International Journal of Advanced Manufacturing Technology, 2014, 73: 1095-1104. [17] 王永宾, 林辉. 基于滑模控制的机载作动器摩擦转矩补偿研究[J]. 中国机械工程, 2010, 21(7): 809-814.WANG Y B, LIN H. Friction compensation of aircraft actuator based on sliding model control[J]. China Mechanical Engineering, 2010, 21(7): 809-814(in Chinese). [18] 李小虎, 王孙安, 张育林, 等. 基于反馈变结构控制电动静液作动器的研究[J]. 机床与液压, 2008, 36(12): 71-74.LI X H, WANG S A, ZHANG Y L, et al. Study on sliding mode control based on feedback for electro-hydrostatic actuator[J]. Machine Tool & Hydraulics, 2008, 36(12): 71-74(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 661
- HTML全文浏览量: 213
- PDF下载量: 82
- 被引次数: 0
