



-
摘要:
针对升力式高超声速飞行器(LHV)再入滑翔过程中的周期性振荡现象,提出了一种基于模糊推理与控制的反馈调节方法以抑制振荡实现平稳滑翔。纵向制导在落点误差预测及指令校正的基础上,在倾侧角外环控制回路增加以高度变化率及空速作为输入的模糊控制器对倾侧角指令进行调节,横侧向制导通过航向角误差走廊约束及倾侧角反转逻辑实现大横程条件下的侧向控制。所提方法不依赖于准平衡滑翔条件(QEGC),同时避免了参数化反馈控制律中的反馈项参数设计问题,具有较强的自适应能力。LHV制导实例仿真表明,所提方法可有效抑制振荡现象,满足终端约束及再入走廊约束,方法的鲁棒性也通过Monte Carlo仿真得到了验证。
-
关键词:
- 升力式高超声速飞行器(LHV) /
- 平稳滑翔 /
- 预测校正 /
- 模糊控制器 /
- 再入走廊
Abstract:Considering the periodic oscillation in reentry glide of Lifting Hypersonic Vehicle (LHV), a feedback correction method based on fuzzy logic and fuzzy control is proposed to reduce the oscillation and keep reentry glide trajectory smooth. First, the longitudinal guidance is developed based on the prediction of the landing error and the correction of the guidance command, and a fuzzy controller whose input consists of altitude ratio and airspeed is applied to outer loop of the bank angle control system. Then, the lateral guidance is designed by the course angle error corridor and bank reversal logic, which realizes the lateral controls in large transverse range conditions. This method is independent of Quasi-Equilibrium Glide Condition (QEGC) and the problem of parameters design in parametric feedback law is avoided, which enhances the adaptive ability. Based on LHV model, the numerical simulations show that periodic oscillation is effectively reduced by the fuzzy feedback control law within terminal and reentry corridor constraints. Meanwhile, the Monte Carlo simulation with random dispersions and errors verifies the robustness of the proposed algorithm.
-
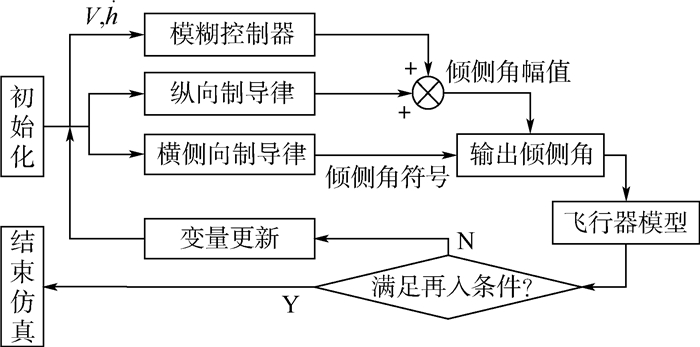
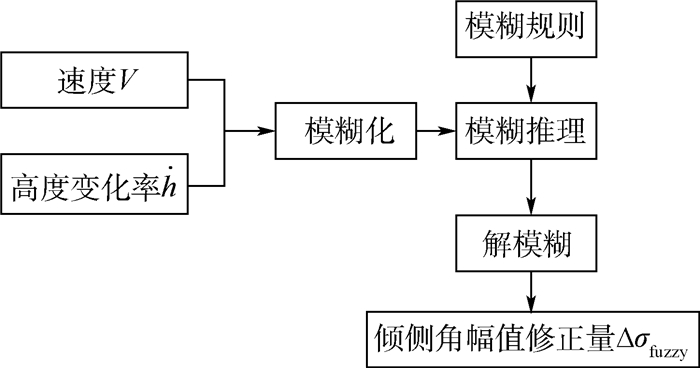
图 7 基于模糊控制的平稳滑翔再入制导律
Figure 7. Reentry steady glide guidance algorithm with fuzzy control
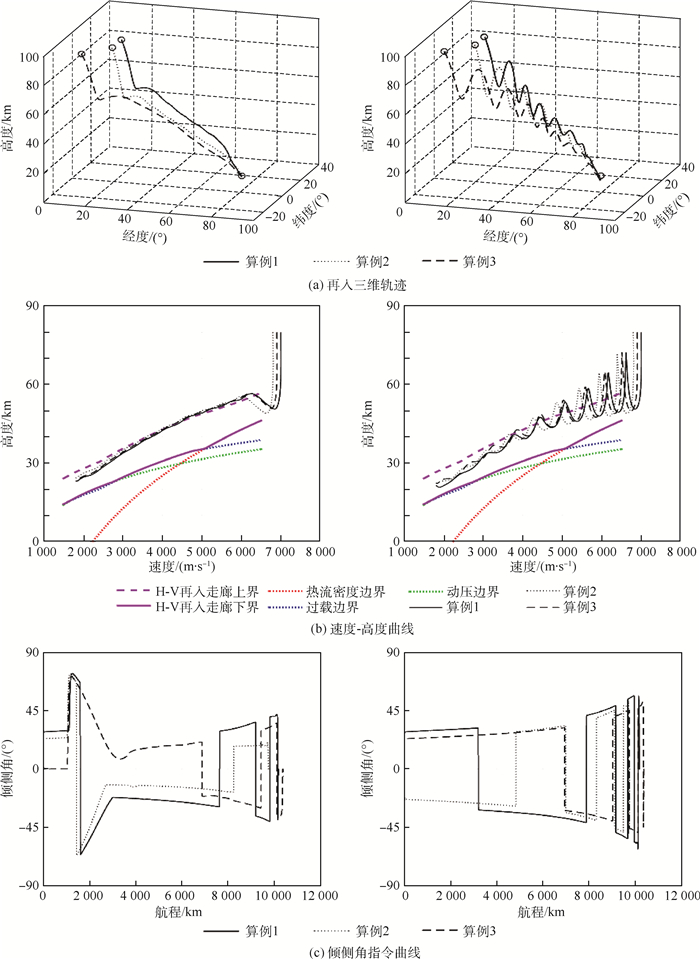
图 8 标准条件下的再入制导仿真结果
Figure 8. Simulation results of reentry guidance in standard conditions
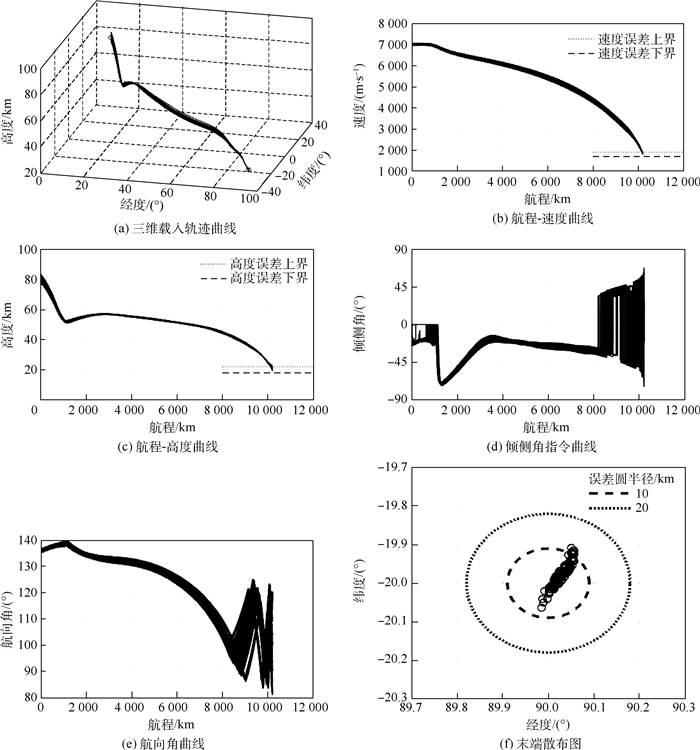
图 9 扰动条件下的再入制导仿真结果
Figure 9. Simulation results of reentry guidance in dispersion conditions
表 1 模糊推理规则
Table 1. Fuzzy logic rules

V NB NM NS NE PE PS PM PB NB NB NB NM NS NS NE PS PM NM NB NB NM NS NS NE PS PM NS NB NB NM NS NS NE PS PM NE NB NB NM NS NS NE PS PM PE NB NM NM NS NE PE PM PB PS NB NM NM NS NE PE PM PB PM NB NM NM NS NE PE PM PB PB NB NM NM NS NE PE PM PB  下载: 导出CSV
下载: 导出CSV
表 2 标准条件下再入初始参数
Table 2. Reentry initial parameters in standard conditions
参数 算例1 算例2 算例3 高度/km 80 80 80 速度/(m·s-1) 7 000 6 800 6 900 经度/(°) 10 10 0 纬度/(°) 30 20 10 航迹俯仰角/(°) -1 -1 -1 航向角/(°) 120 120 100
下载: 导出CSV
表 3 标准条件下再入末端约束
Table 3. Reentry terminal constraint in standard conditions
参数 数值 高度/km 24 速度/(m·s-1) 1 800 经度/(°) 10 纬度/(°) -20
下载: 导出CSV
表 4 标准条件下再入末端误差
Table 4. Reentry terminal error in standard conditions
误差 算例1 算例2 算例3 位置误差/km 9.36/5.20 6.17/8.32 11.92/11.85 高度误差/km 0.83/2.48 0.19/1.47 0.17/1.79 速度误差/(m·s-1) 4/10 1/17 0/7
下载: 导出CSV
表 5 再入扰动参数设置
Table 5. Dispersion parameter setting of reentry guidance
偏差项 分布类型 偏差量 大气密度偏差Δρ 高斯分布 5% 高度偏差Δh 高斯分布 5.0 km 速度偏差ΔV 高斯分布 100 m/s 经度偏差Δθ 高斯分布 0.1° 纬度偏差Δϕ 高斯分布 0.1° 航迹俯仰角偏差Δγ 均匀分布 0.1° 航向角偏差Δψ 均匀分布 1.0° 升力系数偏差ΔCL 高斯分布 10% 阻力系数偏差ΔCD 高斯分布 10%
下载: 导出CSV
表 6 扰动条件下再入初始参数
Table 6. Reentry initial parameters in dispersion conditions
参数 数值 高度/km 80 速度/(m·s-1) 7 000 经度/(°) 10 纬度/(°) 30 航迹俯仰角/(°) -1 航向角/(°) 135
下载: 导出CSV
表 7 扰动条件下再入末端约束
Table 7. Reentry terminal constraint in dispersion conditions
参数 数值 高度/km 20 速度/(m·s-1) 1 800 经度/(°) 90 纬度/(°) -20
下载: 导出CSV
-
[1] LU P. Entry guidance: A unified method[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 713-728. doi: 10.2514/1.62605 [2] WANG Y Y, YANG X X, YAN H C. Reliable fuzzy tracking control of near-space hypersonic vehicle using aperiodic measurement information[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9439-9447. doi: 10.1109/TIE.2019.2892696 [3] WANG F, GUO Y, WANG K, et al. Disturbance observer based robust backstepping control design of flexible air-breathing hypersonic vehicle[J]. IET Control Theory and Applications, 2019, 13(4): 572-583. doi: 10.1049/iet-cta.2018.5482 [4] VOLAND T, HUEBNER D, MCCLINTON R. X-43A hypersonic vehicle technology development[J]. Acta Astronautica, 2006, 59(1): 181-191. [5] 谢愈, 刘鲁华, 汤国建, 等. 多约束条件下高超声速滑翔飞行器轨迹优化[J]. 宇航学报, 2011, 32(12): 2499-2504.XIE Y, LIU L H, TANG G J, et al. Trajectory optimization for hypersonic glide vehicle with multi-constraints[J]. Journal of Astronautics, 2011, 32(12): 2499-2504(in Chinese). [6] 徐明亮, 陈克俊, 刘鲁华, 等. 高超声速飞行器准平衡滑翔自适应制导方法[J]. 中国科学: 技术科学, 2012, 42(4): 378-387.XU M L, CHEN K J, LIU L H, et al. Quasi-equilibrium gliding adaptive guidance method for hypersonic vehicles[J]. Scientia Sinica Technologica, 2012, 42(4): 378-387(in Chinese). [7] 熊子豪, 任章, 江若冲, 等. 标准轨迹制导中准平衡滑翔条件优化研究[J]. 导航定位与授时, 2016, 3(4): 47-52.XIONG Z H, REN Z, JIANG R C, et al. Demonstration and improvement of quasi-equilibrium glide condition in reference trajectory reentry guidance[J]. Navigation, Position and Timing, 2016, 3(4): 47-52(in Chinese). [8] 赵汉元. 航天器再入制导方法综述[J]. 航天控制, 1994, 1(1): 26-33.ZHAO H Y. A survey of guidance methods for spacecraft reentry[J]. Aerospace Control, 1994, 1(1): 26-33(in Chinese). [9] 赵江, 周锐. 基于倾侧角反馈控制的预测校正再入制导方法[J]. 兵工学报, 2015, 36(5): 823-830.ZHAO J, ZHOU R. Predictor-corrector reentry guidance based on feedback bank angle control[J]. Acta Armamentarii, 2015, 36(5): 823-830(in Chinese). [10] 赫泰龙, 陈万春, 刘芳. 高超声速飞行器平稳滑翔弹道扰动运动伴随分析[J]. 北京航空航天大学学报, 2019, 45(1): 109-122. doi: 10.13700/j.bh.1001-5965.2017.0545HE T L, CHEN W C, LIU F. Adjoint analysis of steady glide trajectory with disturbance motion for hypersonic vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(1): 109-122(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0545 [11] 梁子璇, 任章. 基于在线气动参数修正的预测制导方法[J]. 北京航空航天大学学报, 2013, 39(7): 853-857. https://bhxb.buaa.edu.cn/CN/Y2013/V39/I7/853LIANG Z X, REN Z. Predictive reentry guidance with aerodynamic parameter online correction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(7): 853-857(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2013/V39/I7/853 [12] JOSHI A, SIVAN K. Predictor corrector reentry guidance algorithm with path constraints for atmospheric entry vehicles[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1307-1318. doi: 10.2514/1.26306 [13] 雍恩米, 刘深深, 程艳青, 等. 面向弹道优化的高超声速再入飞行器模态稳定性分析[J]. 航空学报, 2019, 40(7): 42-51.YONG E M, LIU S S, CHENG Y Q, et al. Mode stability analysis of hypersonic reentry vehicle for trajectory optimization[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7): 42-51(in Chinese). [14] WAN Z J, LIU L, TANG G, et al.Optimal guidance with multi-targets for hypersonic vehicle in dive phase[C]//20136th International Conference on Recent Advances in Space Technologies(RAST).Piscataway: IEEE Press, 2013: 13710685. [15] WANG H L, HUA Y Z, LI Q D.Constrained predictor corrector entry guidance for common aero vehicle[C]//Chinese Control Conference(CCC), 2015: 934-1768. [16] 王智, 唐硕, 闫晓东. 高超声速滑翔飞行器约束预测校正再入制导[J]. 飞行力学, 2012, 30(2): 175-180.WANG Z, TANG S, YAN X D. Constrained predictor-corrector reentry guidance for hypersonic glide vehicle[J]. Flight Dynamics, 2012, 30(2): 175-180(in Chinese). [17] XI Y, MENG Y. Adaptive actuator failure compensation control for hypersonic vehicle with full state constraints[J]. Aerospace Science and Technology, 2019, 85: 464-473. doi: 10.1016/j.ast.2018.12.032 [18] GILEFERNANDEZ J, TIERNO M. Practical method for optimization of low-thrust transfers[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(6): 1927-1931. doi: 10.2514/1.50739 [19] 梅映雪, 冯玥, 王容顺, 等. 高超声速飞行器多约束再入轨迹快速优化[J]. 宇航学报, 2019, 40(7): 758-767.MEI Y X, FENG Y, WANG R S, et al. Fast optimization of reentry trajectory for hypersonic vehicles with multiple constraints[J]. Journal of Astronautics, 2019, 40(7): 758-767(in Chinese). [20] 王青, 莫华东, 吴振东, 等. 考虑禁飞圆的高超声速飞行器再入预测制导[J]. 哈尔滨工业大学学报, 2015, 47(2): 104-109.WANG Q, MO H D, WU Z D, et al. Predictive reentry guidance for hypersonic vehicles considering no fly zone[J]. Journal of Harbin Institute of Technology, 2015, 47(2): 104-109(in Chinese) [21] 管萍, 和志伟. 高超声速飞行器姿态的自适应模糊滑模控制[J]. 控制工程, 2018, 25(7): 1139-1144.GUAN P, HE Z W. Adaptive fuzzy sliding mode control for hypersonic vehicle attitude[J]. Control Engineering of China, 2018, 25(7): 1139-1144(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1398
- HTML全文浏览量: 374
- PDF下载量: 374
- 被引次数: 0
