



-
摘要:
在分布式事件触发机制的基础上对多航天器分组姿态协同控制问题进行了研究。系统内包含若干个分组,并且航天器间的信息交互被抽象为无向拓扑。以修正罗德里格斯参数(MRP)描述航天器的姿态,构造了包含姿态和角速度的辅助变量,并设计了分布式的控制输入。在分布式事件触发机制下,对每个航天器设计了触发函数,并结合代数图论和Lyapunov稳定性理论证明了多航天器能够渐近达到分组姿态协同,同时证明了系统内不会发生Zeno现象。仿真结果验证了在分布式事件触发机制下提出的控制输入的有效性。
Abstract:Group attitude coordinated control of multi-spacecraft on the basis of distributed event-triggered mechanism is investigated. The multi-spacecraft system contains several subgroups, and the information exchange among spacecraft is regarded as undirected topology. The attitude of spacecraft is described by Modified Rodrigues Parameters (MRP), an auxiliary variable with attitude and angular velocity is constructed, and distributed control input is designed. Under distributed event-triggered mechanism, triggering function is designed for every spacecraft. It is proved with algebraic graph theory and Lyapunov stability theory that multi-spacecraft can reach group attitude coordination asymptotically, and it is also proved that Zeno behavior will not occur in the system. The effectiveness of the control input proposed under distributed event-triggered mechanism is verified by simulation results.
-
Key words:
- multi-spacecraft /
- group /
- attitude control /
- event-triggered /
- undirected topology /
- triggering function
-
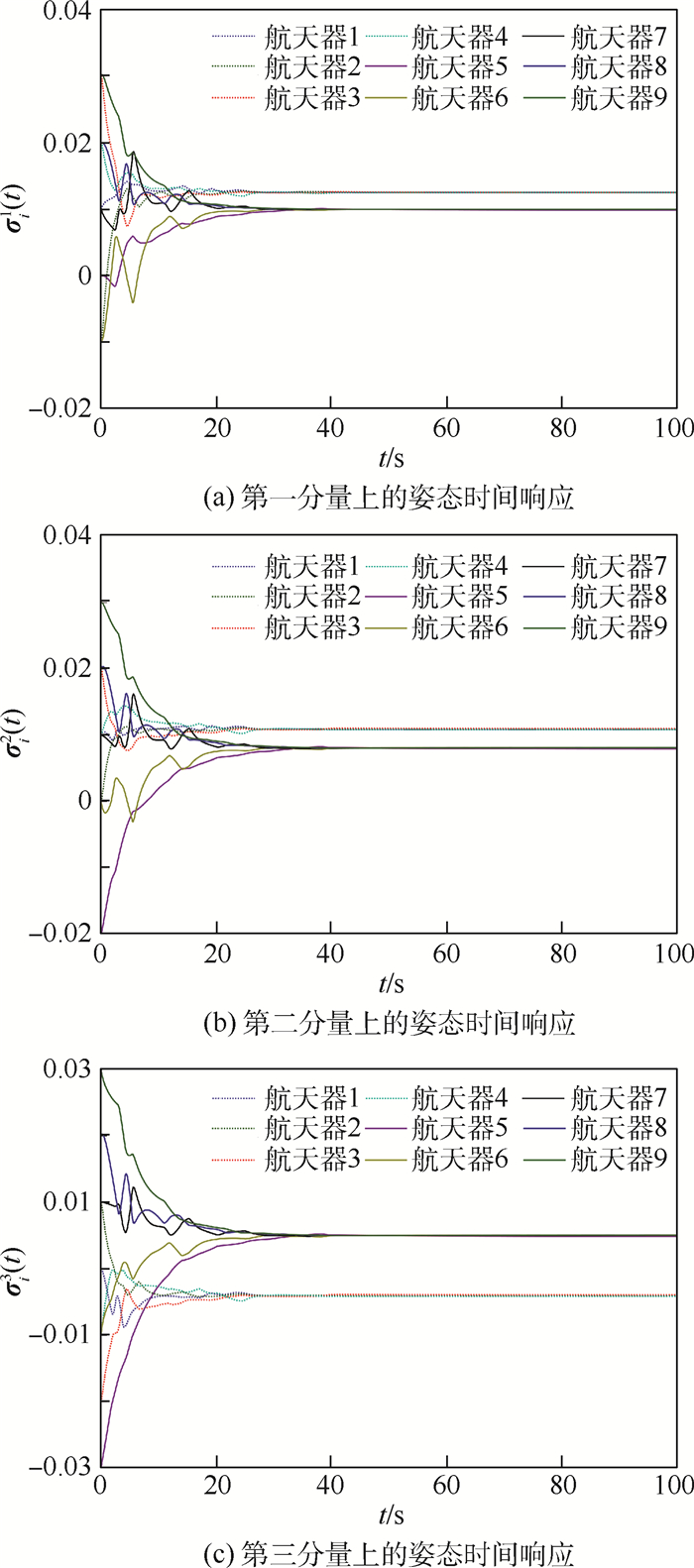
图 2 航天器在3个分量上的姿态时间响应
Figure 2. Attitude time response of spacecraft on three components

图 3 航天器在3个分量上的角速度时间响应
Figure 3. Angular velocity time response of spacecraft on three components
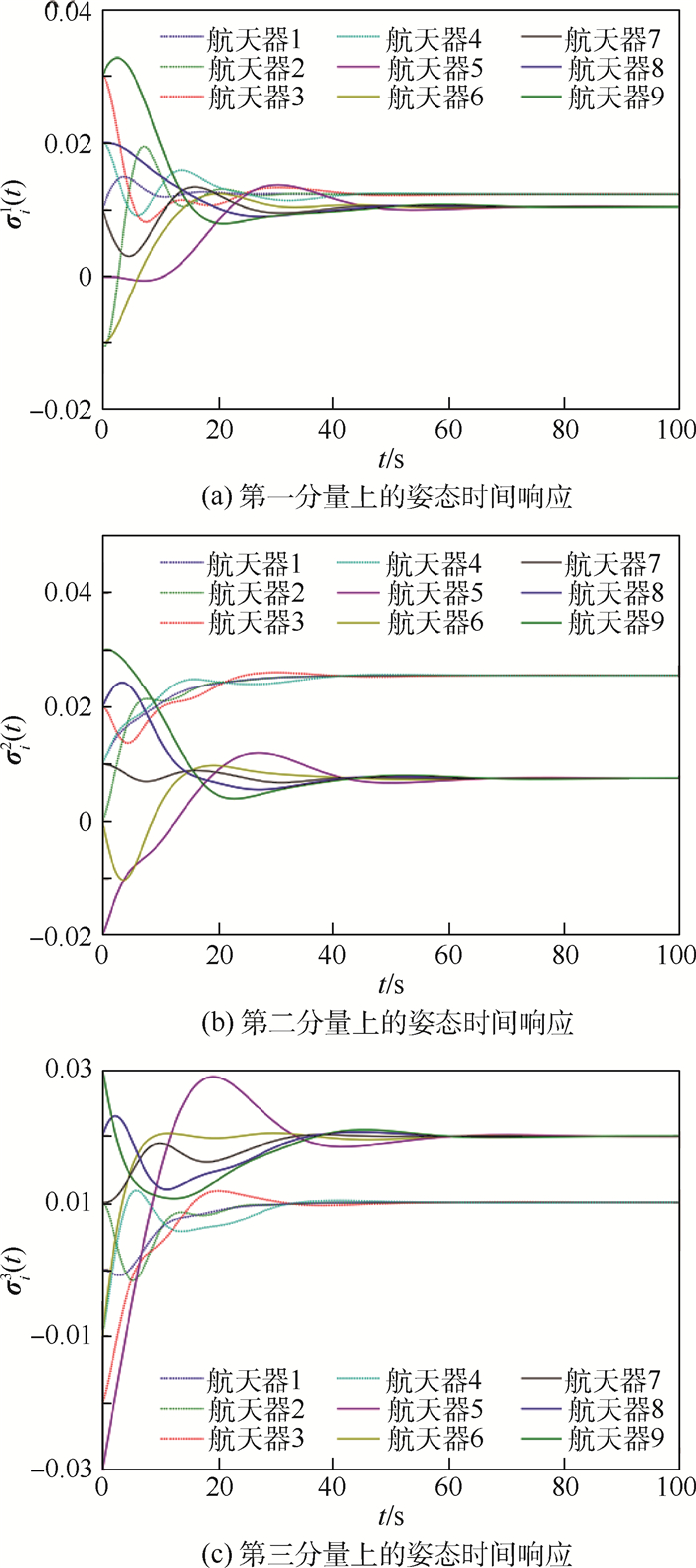
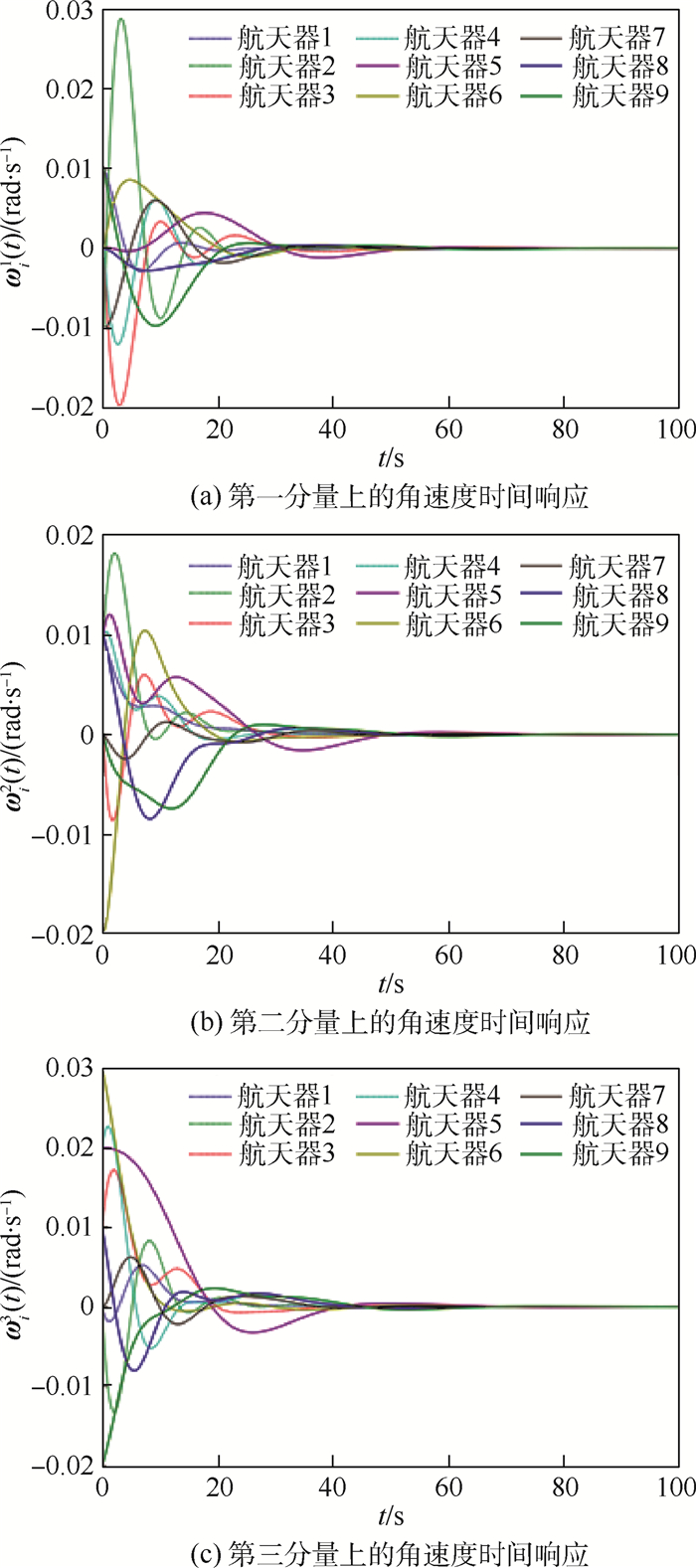

图 6 大角度初值条件下航天器在3个分量上的姿态时间响应
Figure 6. Attitude time response of spacecraft on three components with large initial angles

图 7 大角度初值条件下航天器在3个分量上的角速度时间响应
Figure 7. Angular velocity time response of spacecraft on three components with large initial angles
表 1 触发结果统计
Table 1. Statistical triggering result
编号 触发次数 最小时间间隔/s 最大时间间隔/s 1 1 038 1.776 4×10-5 5.558 9 2 870 4.440 9×10-2 5.278 8 3 1 434 5.211 9×10-4 9.953 6 4 1 771 3.041 6×10-3 8.723 3 5 1 203 5.781 4×10-5 14.985 0 6 1 133 1.141 2×10-3 16.095 6 7 895 3.587 2×10-3 8.142 4 8 507 2.224 3×10-2 8.102 8 9 2 469 1.193 5×10-5 0.613 8  下载: 导出CSV
下载: 导出CSV
-
[1] LIANG H Z, SUN Z W, WANG J Y. Robust decentralized attitude control of spacecraft formations under time-varying topologies, model uncertainties and disturbances[J]. Acta Astronautica, 2012, 81(2): 445-455. doi: 10.1016/j.actaastro.2012.08.017 [2] SHASTI B, ALASTY A, ASSADIAN N. Robust distributed control of spacecraft formation flying with adaptive network topology[J]. Acta Astronautica, 2017, 136(7): 281-296. [3] 蔡光斌, 闫杰, 赵玉山, 等. 具有随机多跳时变时延的多航天器协同编队姿态一致性[J]. 控制理论与应用, 2018, 35(10): 1415-1421.CAI G B, YAN J, ZHAO Y S, et al. Attitude consensus of multi-spacecraft cooperative formation with stochastic multi-hop time-varying delay[J]. Control Theory & Applications, 2018, 35(10): 1415-1421(in Chinese). [4] YI H, LIU M, LI M. Event-triggered fault tolerant control for spacecraft formation attitude synchronization with limited data communication[J]. European Journal of Control, 2019, 48(7): 97-103. [5] CAI H, HUANG J. Leader-following attitude consensus of multiple rigid body systems by attitude feedback control[J]. Automatica, 2016, 69(7): 87-92. [6] CAI H, HUANG J. Leader-following adaptive consensus of multiple rigid spacecraft systems[J]. Science China Information Sciences, 2016, 59(1): 1-13. doi: 10.1007/s11432-015-5442-3/email/correspondent/c1/new [7] CAI H, HUANG J. Leader-following attitude consensus of multiple uncertain systems subject to external disturbance[J]. International Journal of Robust & Nonlinear Control, 2017, 27(5): 742-760. doi: 10.1002/rnc.3595/abstract [8] 马鸣宇, 董朝阳, 王青, 等. 基于时变增益ESO的多航天器SO(3)姿态协同控制[J]. 北京航空航天大学学报, 2018, 44(9): 1797-1807. doi: 10.13700/j.bh.1001-5965.2017.0719MA M Y, DONG C Y, WANG Q, et al. Cooperative attitude control on SO(3) for multiple spacecraft with time-varying gain ESO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9): 1797-1807(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0719 [9] LIU T, HUANG J. Leader-following attitude consensus of multiple rigid body systems subject to jointly connected switching networks[J]. Automatica, 2018, 92(6): 63-71. [10] LU M, LIU L. Leader-following attitude consensus of multiple rigid spacecraft systems under switching networks[J]. IEEE Transactions on Automatic Control, 2019, 2020, 65(2): 839-845. [11] MA L, WANG S C, MIN H B, et al. Distributed attitude consensus for multiple rigid spacecraft under jointly connected awitching toplogies[J]. Journal of Control Science and Engineering, 2018, 2016: 63-71. [12] HUANG D, WANG Q, DUAN Z. Distributed attitude control for multiple flexible spacecraft under actuator failures and saturation[J]. Nonlinear Dynamics, 2017, 88(1): 529-546. doi: 10.1007/s11071-016-3258-3 [13] 张亚博, 师鹏, 张皓, 等. 电磁航天器编队悬停鲁棒协同控制方法[J]. 北京航空航天大学学报, 2019, 45(2): 388-397. doi: 10.13700/j.bh.1001-5965.2018.0282ZHANG Y B, SHI P, ZHANG H, et al. A robust coordinated control method for hovering of electromagnetic spacecraft formation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 388-397(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0282 [14] 魏春岭, 袁泉, 张军, 等. 空间多体系统轨道姿态及机械臂一体化控制[J]. 北京航空航天大学学报, 2020, 46(2): 252-258. doi: 10.13700/j.bh.1001-5965.2019.0204WEI C L, YUAN Q, ZHANG J, et al. Integrated orbit, attitude and manipulator control of space multi-body system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 252-258(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0204 [15] WENG S, YUE D. Distributed event-triggered cooperative attitude control of multiple rigid bodies with leader-follower architecture[J]. International Journal of Systems Science, 2016, 47(3): 631-643. doi: 10.1080/00207721.2014.891777 [16] ZHANG C X, WANG J H, SUN R. Multi-spacecraft attitude cooperative control using model-based event-triggered methodology[J]. Advances in Space Research, 2018, 62(9): 2620-2630. doi: 10.1016/j.asr.2018.07.019 [17] XU C, WU B L, CAO X B, et al. Distributed adaptive event-triggered control for attitude synchronization of multiple spacecraft[J]. Nonlinear Dynamics, 2019, 95(3): 2625-2638. doi: 10.1007/s11071-018-4706-z [18] FU J B, LIU M, LIU H Y, et al. Coordinated attitude control for synthetic aperture radar satellites with quatization and communication delay[J]. International Journal of Control, Automation, and Systems, 2019, 17(23): 1770-1780. doi: 10.1007/s12555-018-0788-0 [19] 周绍磊, 王帅磊, 刘伟, 等. 基于分组一致性的刚体集群姿态协同控制[J]. 中国科学: 技术科学, 2020, 50(5): 493-505.ZHOU S L, WANG S L, LIU W, et al. Cooperative attitude control in rigid body swarms based on group consensus[J]. Scientia Sinica Technologica, 2020, 50(5): 493-505(in Chinese). [20] 周绍磊, 王帅磊, 刘伟. 有向切换拓扑条件下多航天器分组姿态协同控制[J/OL]. 控制与决策, 2020: 1-9[2020-07-19]. https://doi.org/10.13195/j.kzyjc.2020.0311.ZHOU S L.WANG S L, LIU W.Group attitude coordinated control of multi-spacecraft with directed switching topologies[J/OL].Control and Decision, 2020: 1-9[2020-07-19].https://doi.org/10.13195/j.kzyjc.2020.0311 (in Chinese). [21] WENG S X, YUE D, XIE X P, et al. Distributed event-triggered cooperative attitude control of multiple groups of rigid bodies on manifold SO(3)[J]. Information Sciences, 2016, 370(11): 636-649. [22] YU J Y, WANG L. Group consensus of multi-agent systems with directed information exchange[J]. International Journal of Systems Science, 2012, 43(2): 334-348. doi: 10.1080/00207721.2010.496056 [23] SHANG Y L. Group consensus of multi-agent systems in directed networks with noises and time delays[J]. International Journal of Systems Science, 2015, 46(14): 2481-2492. doi: 10.1080/00207721.2013.862582 [24] HUANG J, WEN G Y, PENG Z X, et al. Group consensus with reference states for heterogeneous multiagent systems via pinning control[J]. International Journal of Control, Automation, and Systems, 2019, 17(1): 1096-1106. doi: 10.1007/s12555-017-0706-x [25] KHALIL K H. Nonlinear systems[M]. Upper Saddle River: Prentice Hall, 2002: 128. [26] 王智鹏, 郭凤至, 孙兆伟, 等. 事件驱动的卫星编队姿态分布式协同控制[J]. 哈尔滨工业大学学报, 2018, 50(10): 41-47.WANG Z P, GUO F Z, SUN Z W, et al. Event-triggered distributed attitude coordination control of satellite formation[J]. Journal of Harbin Institute of Technology, 2018, 50(10): 41-47(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 1529
- HTML全文浏览量: 264
- PDF下载量: 104
- 被引次数: 0
