



Maneuver trajectory optimization method of multicopter under space-time constraints
-
摘要:
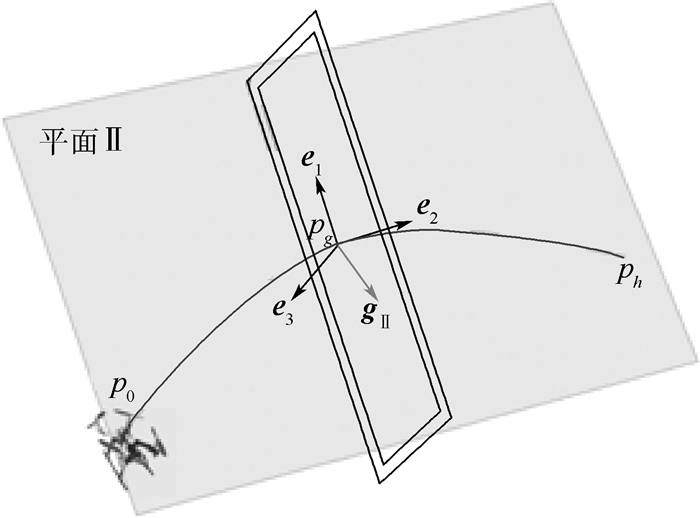
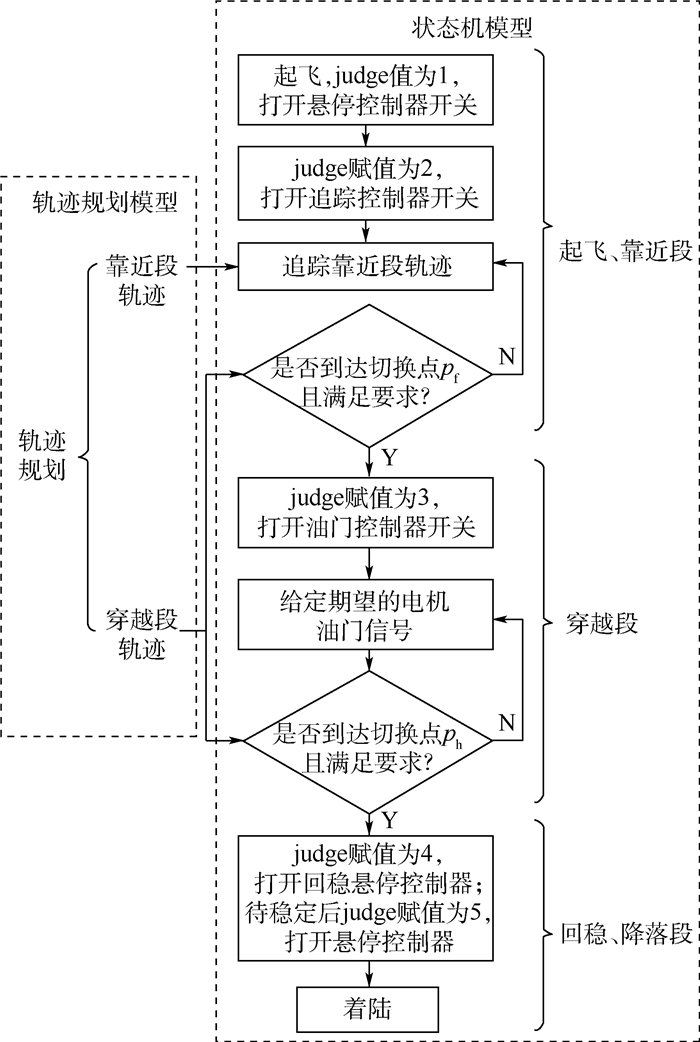
多旋翼飞行器常应用于震后搜救、地质勘探等复杂多变的场景中,考虑到其续航能力及环境特点,优化多旋翼的飞行轨迹以更好更快地完成任务已成为关键问题之一。为此,设定多旋翼穿越室内斜缝的任务场景,提出了一种基于抛物原理和庞特里亚金极小值原理的多约束条件下轨迹优化方法。模仿将东西抛过窄窗的过程,从分析斜缝角度出发,设计一条抛物线轨迹,引导飞行器借助惯性越过斜缝,对于抛掷飞机所需的初始状态,利用庞特里亚金极小值原理设计状态转换轨迹实现。在MATLAB中搭建3D模型验证穿越效果,试验显示,多旋翼最大能穿越竖直方向63°倾斜或水平方向32°倾斜的斜缝。
Abstract:Multicopter are often used in complex and variable scenarios such as post-earthquake search and rescue, geological exploration, etc. Considering their endurance and environmental characteristics, optimizing the flight trajectory of multicopter to complete tasks better and faster has become a key issue. To this end, a multicopter's traversing indoor diagonal slit mission is set up, and a trajectory optimization method under multi-constraint based on the parabolic principle and the Pontryagin's minimum principle is proposed. By imitating the process of throwing things through a narrow window and from the perspective of analyzing the oblique slit of the task object, a parabolic trajectory is designed to guide the aircraft to cross the oblique slit with inertia. For the initial state required to throw the aircraft, Pontryagin's minimum principle is usedto realize the state transition trajectory. A 3D model was built in MATLAB to verify the crossing effect. The experiment shows that the multicopter can pass through the inclined seam with a vertical tilt of 63° or a horizontal tilt of 32°.
-
Key words:
- multicopter /
- multi-constraint /
- trajectory optimization /
- parabolic principle /
- state transition
-
表 1 状态机参数
Table 1. State machine parameters
切换点 位置误差/cm 速度误差/(cm·s-1) 加速度误差/(cm·s-2) 穿缝起飞点 1 5 抛出点 2 5 250 回稳点 15 着陆时刻 300  下载: 导出CSV
下载: 导出CSV
表 2 四旋翼穿缝性能
Table 2. Sewing ability of quadrotor
斜缝状态 4 m/s 5 m/s 竖直方向倾斜 65° 50° 水平方向倾斜 32° 30° 组合倾斜 60°+10°
45°+15°
24°+30°50°+10°
30°+20°
5°+30°
下载: 导出CSV
-
[1] 韦意豪. 四旋翼无人机轨迹跟踪与避障控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2018: 6-7.WEI Y H.Trajectory tracking and obstacle avoidanceof quadrotor[D]. Harbin: Harbin Institute of Technology, 2018: 6-7(in Chinese). [2] 王维平, 刘娟. 无人飞行器航迹规划方法综述[J]. 飞行力学, 2010, 28(2): 6-10.WANG W P, LIU J. Introduction to unmanned air vehicle route planning methods[J]. Flight Dynamics, 2010, 28(2): 6-10(in Chinese). [3] 杜萍, 杨春. 飞行器航迹规划算法综述[J]. 飞行力学, 2005, 23(2): 10-14.DU P, YANG C. Introduction of air vehicle path planning algorithms[J]. Flight Dynamics, 2005, 23(2): 10-14(in Chinese). [4] 张广林, 胡小梅, 柴剑飞, 等. 路径规划算法及其应用综述[J]. 现代机械, 2011(5): 85-90.ZHANG G L, HU X M, CHAI J F, et al. Summary of path planning algorithm and its application[J]. Modern Machinery, 2011(5): 85-90(in Chinese). [5] 陈功, 傅瑜, 郭继峰. 飞行器轨迹优化方法综述[J]. 飞行力学, 2011, 29(4): 1-5.CHEN G, FU Y, GUO J F. Survey of aircraft trajectory optimization methods[J]. Flight Dynamics, 2011, 29(4): 1-5(in Chinese). [6] MELLINGER D, MICHAEL N, KUMAR V. Trajectory generation and control for precise aggressive maneuvers with quadrotors[J]. The International Journal of Robotics Research, 2012, 31(5): 664-674. doi: 10.1177/0278364911434236 [7] LIU S K, MOHTA K, ATANASOV N, et al. Search-based mot-ion planning for aggressive flight in SE(3)[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2439-2446. doi: 10.1109/LRA.2018.2795654 [8] TORDESILLAS J, LOPEZ B T, EVERETT M, et al.FASTER: Fast and safe trajectory planner for flights in unknown environments[EB/OL]. (2020-01-09)[2020-07-25]. [9] 曾佳, 申功璋. 一种无人机平滑飞行轨迹规划方法[J]. 系统仿真学报, 2008, 20(S1): 470-473.ZENG J, SHEN G Z. A method of smooth trajectory planning for UAV[J]. Journal of System Simulation, 2008, 20(S1): 470-473(in Chinese). [10] 陈杰, 董伟, 盛鑫军, 等. 基于螺旋样条的旋翼无人机区域轨迹规划[J]. 中国机械工程, 2019, 30(12): 1453-1459.CHEN J, DONG W, SHENG X J, et al. Regional trajectory planning of unmanned aerial vehicles based on spiral spline[J]. China Mechanical Engineering, 2019, 30(12): 1453-1459(in Chinese). [11] 孟少华, 向锦武, 罗漳平, 等. 微小型无人直升机避障最优轨迹规划[J]. 北京航空航天大学学报, 2014, 40(2): 246-251. https://bhxb.buaa.edu.cn/CN/Y2014/V40/I2/246MENG S H, XIANG J W, LUO Z P, et al. Optimal trajectory planning for small-scale unmanned helicopter obstacle avoidance[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2): 246-251(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2014/V40/I2/246 [12] WANG T, WANG L, LIANG J, et al.Autonomous control and trajectory tracking of quadrotor helicopter[C]//2012 IEEE International Conference on Computer Society and Automation Engineering(CSAE).Piscataway: IEEE Press, 2012: 251-255. [13] 全权. 多旋翼飞行器设计与控制[M]. 北京: 电子工业出版社, 2018: 73-79.QUAN Q. Introduction to multicopter design and control[M]. Beijing: Publishing House of Electtronics Industry, 2018: 73-79(in Chinese). [14] FALANGA D, MUEGGLER E, FAESSLER M, et al.Aggressive quadrotor flight through narrow gaps with on-board sensing and computing using active vision[C]//International Conference on Robotics and Automation (ICRA).Piscataway: IEEE Press, 2017: 5774-5781. [15] 胡寿松, 王执铨, 胡维礼. 最优控制理论与系统[M]. 3版. 北京: 科学出版社, 2017: 49-76.HU S S, WANG Z Q, HU W L. Optimal control theory and system[M]. 3rd ed. Beijing: Science Press, 2017: 49-76(in Chinese). -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 1156
- HTML全文浏览量: 234
- PDF下载量: 82
- 被引次数: 0
