



-
摘要:
近年来,随着自主控制技术与任务载荷的快速发展,越来越多的无人机(UAV)具备了良好的任务自主能力。在执行任务过程中,降落阶段的安全风险最大,导航定位精度较差、人员决策失误等是造成降落过程中事故多发的主要原因。通过总结无人机自主降落过程中对引导控制的需求,对国内外无人机军用和民用自主降落解决方案进行了梳理和介绍,对无人机自主降落关键技术和研究现状进行了分析,提出了该领域未来发展的重点方向。
Abstract:In recent years, with the rapid development of autonomous control technology and mission loads, more and more Unmanned Aerial Vehicles (UAVs) have mission autonomy capability. During the execution of the mission, the safety risk of the landing phase is the greatest, and poor navigation and positioning accuracy, personnel decision errors and other reasons are the main causes of accidents during the landing process. By summarizing the demand for guidance control in the process of UAV autonomous landing, the autonomous landing solutions for the military and civilian application are introduced, the key technologies and research status of UAV autonomous landing are analyzed, and the main directions of future development in this field are proposed.
-

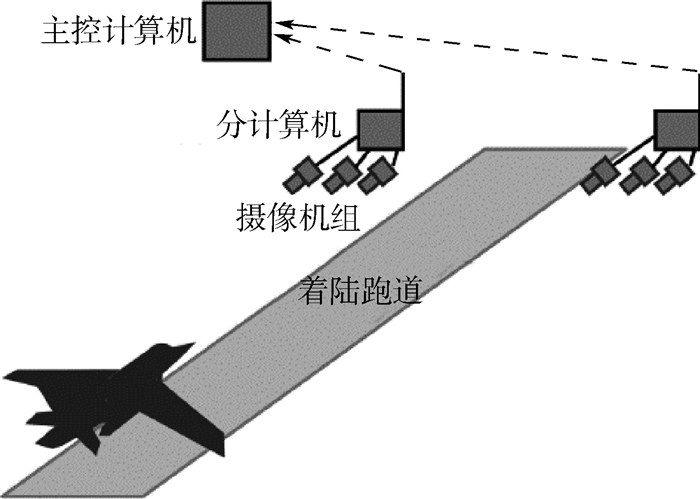
图 2 无人机美军帕塔克森特河着陆验证基地
Figure 2. UAV verifies base station during landing at Patuxent River
-
[1] 李强, 张淑丽, 蒙文巩. 国外舰载无人机着舰引导技术发展现状[J]. 无人系统技术, 2018(2): 43-48.LI Q, ZHANG S L, MENG W G. Current situation of foreign carrier-borne UAV landing guidance technology[J]. Unmanned System Technology, 2018(2): 43-48(in Chinese). [2] 谭立国, 杨小艳, 宋申民, 等. 面向小型舰船的固定翼无人机海上回收方法综述[J]. 哈尔滨工业大学学报, 2019, 51(10): 1-10.TAN L G, YANG X Y, SONG S M, et al. An overview of marine recovery methods of UAV for small ships[J]. Journal of Harbin Institute of Technology, 2019, 51(10): 1-10(in Chinese). [3] ARRABITO G R, HO G, LAMBERT A, et al.Human factors issues for controlling uninhabited aerial vehicles: Preliminary findings in support of the Canadian forces joint unmanned aerial vehicle surveillance target qcquisition system project[R].National Technical Information Service, 2010. [4] WILLIAMS K W.A summary of unmanned aircraft accident/incident data: Human factors implications[R].Federal Aviation Administration Oklahoma City Ok Civil Aeromedical Inst, 2004. [5] 大数据解读航班准点率[EB/OL]. (2015-01-31)[2020-05-30].Big data on flight punctuality[EB/OL].(2015-01-31)[2020-05-30].(in Chinese). [6] 美国海军完成联合精确进场与着舰系统舰载系统的工程和制造开发阶段[EB/OL]. (2014-01-06)[2020-05-30].The U.S.Navy has completed the engineering and manufacturing development phase of the shipboard system for the joint precision approach and landing system[EB/OL].(2014-01-06)[2020-05-30].(in Chinese). [7] X-47B unmanned combat air system carrier (UCAS)[EB/OL].(2005-03-01)[2020-05-30]. [8] DCNS公司首次完成无人机在舰上自动降落试验[EB/OL]. (2008-10-15)[2020-05-30].DCNS completed the first automatic landing test of drones on ships[EB/OL].(2008-10-15)[2020-05-30].(in Chinese). [9] Unmanned little bird H-6U[EB/OL].(2013-02-04)[2020-05-30]. [10] HUH S, SHIM D H. A vision-based landing system for small unmanned aerial vehicles using an airbag[J]. Control Engineering Practice, 2010, 18(7): 812-823. doi: 10.1016/j.conengprac.2010.05.003 [11] KIM H J, KIM M, LIM H, et al. Fully autonomous vision-based net-recovery landing system for a fixed-wing UAV[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4): 1320-1333. doi: 10.1109/TMECH.2013.2247411 [12] 朱建明. 无人驾驶直升机自主降落的算法研究与实现[D]. 成都: 电子科技大学, 2009.ZHU J M.Research and implementation of autonomous landing algorithm of unmanned helicopter[D].Chengdu: University of Electronic Science and Technology of China, 2009(in Chinese). [13] SHAKERNIA O.Vision-based control and coordination of unmanned vehicles[D].Berkeley: University of California, Berkeley, 2003: 24-26. [14] KARAS O.UAV simulation environment for autonomous flight control algorithms[D].Morgantown: West Virginia University, 2012: 18-19. [15] 桂阳. 基于机载视觉的无人机自主着舰引导关键技术研究[D]. 长沙: 国防科学技术大学, 2013.GUI Y.Research on key techniques of airborne vision-based navigation for autonomous landing of a UAV on a ship deck[D].Changsha: National University of Defense Technology, 2013(in Chinese). [16] 张宇. 基于红外探测器的无人机地基视觉引导着陆关键技术研究[D]. 长沙: 国防科学技术大学, 2013.ZHANG Y.Research on ground-based visual landing technology for an unmanned aerial vehicle with infrared detectors[D].Changsha: National University of Defense Technology, 2013(in Chinese). [17] KONG W W, ZHOU D L, ZHANG Y, et al.A ground-based optical system for autonomous landing of a fixed wing UAV[C]//Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Piscataway: IEEE Press, 2014: 4797-4804. [18] KELNER J M, ZIÓŁKOWSKI C. Errors of UAV autonomous landing system for different radio beacon configurations[J]. TransNav the International Journal on Marine Navigation and Safety of Sea Transportation, 2019, 13(2): 429-435. doi: 10.12716/1001.13.02.22 [19] YANG T, LI Z, ZHANG F, et al. Panoramic UAV surveillance and recycling system based on structure-free camera array[J] IEEE Access, 2019, 7: 25763-25778. doi: 10.1109/ACCESS.2019.2900167 [20] 乌兰巴根, 胡继忠, 徐元铭. 无人直升机自主着舰系统设计及仿真试验[J]. 北京航空航天大学学报, 2010, 36(8): 986-990. https://bhxb.buaa.edu.cn/CN/Y2010/V36/I8/986WULAN B G, HU J Z, XU Y M. Unmanned helicopter autonomous board landing system and simulation experiment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(8): 986-990(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2010/V36/I8/986 [21] 朱创创, 梁晓龙, 张佳强, 等. 无人机集群编队控制演示验证系统[J]. 北京航空航天大学学报, 2018, 44(8): 1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600ZHU C C, LIANG X L, ZHANG J Q, et al. Demonstration and verification system for UAV swarm formation control[J]. Journal of Beijing University of Aeronautics and Astronsutics, 2018, 44(8): 1739-1747(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0600 [22] 孔维玮. 基于多传感器的无人机自主着舰引导与控制系统研究[D]. 长沙: 国防科学技术大学, 2017.KONG W W.Multi-sensor based autonomous landing guidance and control system of a fixed-wing unmanned aerial vehicle[D].Changsha: National University of Defense Technology, 2017(in Chinese). -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 1999
- HTML全文浏览量: 436
- PDF下载量: 497
- 被引次数: 0
