



-
摘要:
舰载无人机是航母-舰载机系统的重要作战武器,实现舰载无人机在航母甲板上的自主滑行对于提高甲板作业效率具有重要意义。对舰载无人机滑行轨迹控制方法问题进行了研究。首先,描述甲板滑行任务的过程,在此基础上,建立滑行轨迹控制问题的数学模型,包括舰载无人机甲板滑行运动模型、滑行任务约束条件以及评价轨迹控制任务的性能指标。其次,考虑甲板环境和轨迹控制任务要求,基于模型预测控制思想,将在线滑行路径规划与轨迹控制结合,采用滚动优化方法计算出舰载无人机实际滑行轨迹,并且得到控制指令信号。最后,以“尼米兹”级航母为例,对不同停放位置舰载无人机起飞前的滑行轨迹进行仿真计算,结果表明了模型的合理性和算法的有效性。
Abstract:Unmanned aircraft is an important weapon of carrier-aircraft system. Autonomous taxiing of aircraft is significant for the efficiency of deck operation. The trajectory control problem of unmanned aircraft taxiing on deck of an aircraft carrier is studied in this paper. First, the task of aircraft taxiing on the deck is described. On this basis, the mathematical model for taxiing trajectory control problem is established. In this model, the ground motion of aircraft is contained, the constraints of aircraft taxiing are considered, and the performance index is designed to evaluate the trajectory control task. Considering deck environment and trajectory control task requirement, a model predictive control based method is proposed to obtain the feasible taxiing path of aircraft. Trajectory control is integrated into online taxiing path planning, and rolling optimization method is adopted to calculate the practical taxiing trajectory and obtain the control command signal. Taking the Nimitz-class aircraft carrier as an example, the taxiing trajectories of multiple unmanned aircraft at different parking positions are calculated. Simulation results demonstrate the rationality of the established model and the validity of the proposed method.
-
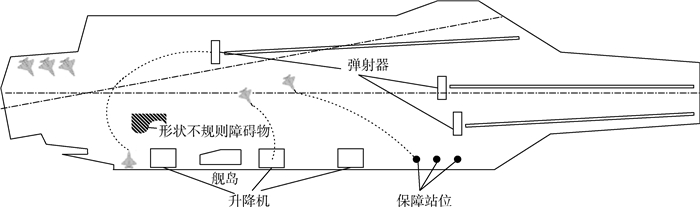
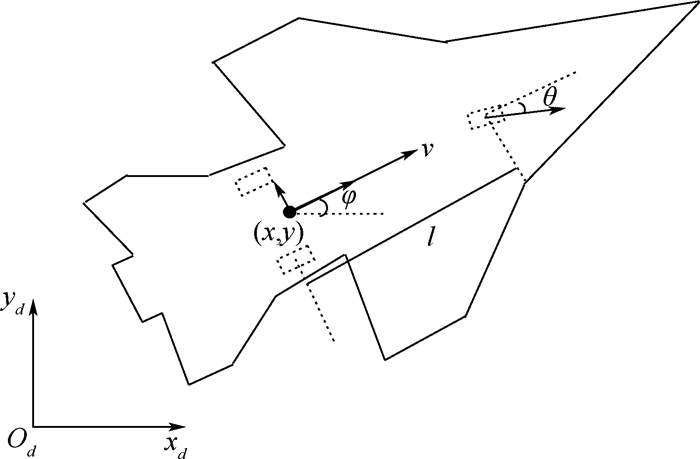
图 2 舰载无人机地面运动模型示意图
Figure 2. Schematic diagram of ground motion model of unmanned carrier aircraft

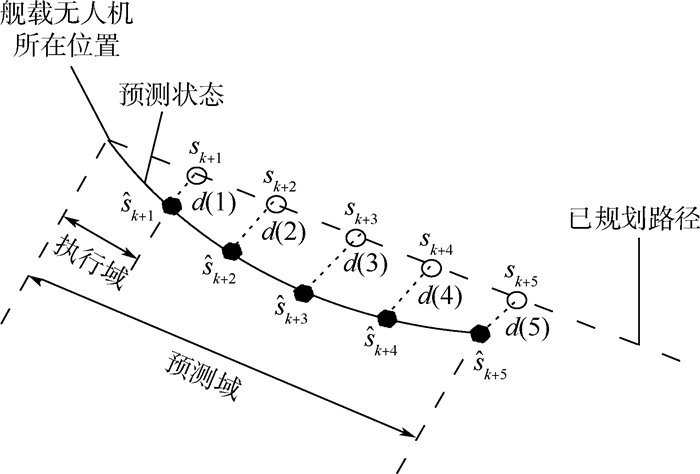
图 5 舰载无人机轨迹控制方法流程
Figure 5. Flowchart of trajectory control method for unmanned carrier aircraft
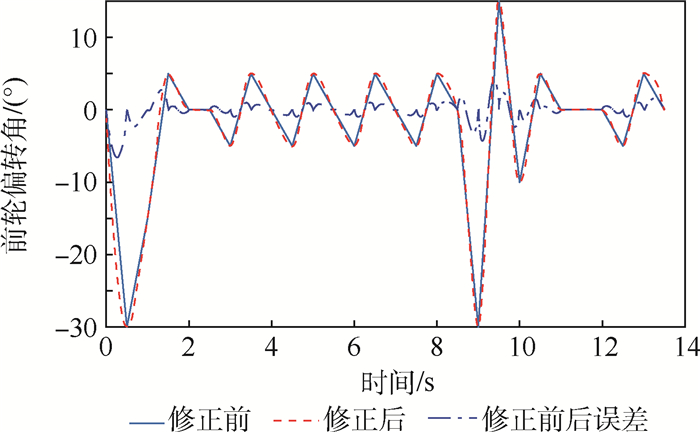
图 8 滑行过程中A1前轮偏转角变化曲线
Figure 8. Curves of nosewheel deflection angle of A1 during taxiing
表 1 舰载无人机起飞位置
Table 1. Launching position of unmanned carrier aircraft
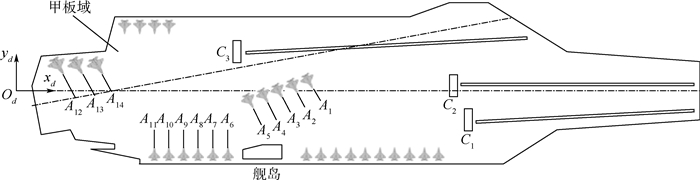
弹射器 舰载无人机 C1 A4、A5、A8、A9、A10、A11 C2 A1、A2、A3、A6、A7 C3 A14、A13、A12  下载: 导出CSV
下载: 导出CSV
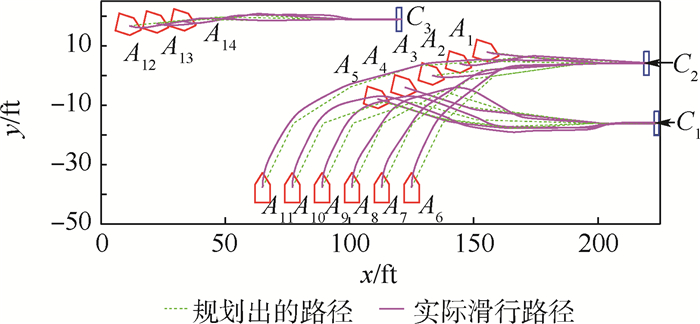
表 2 滑行时间与轨迹控制误差
Table 2. Taxiing time and trajectory control error
舰载机 滑行时间/s 误差/ft A1 13.5 0.6029 A2 15.5 0.5641 A3 18 0.8810 A4 21 0.0172 A5 23 0.9670 A6 23.5 0.2786 A7 25.5 0.2022 A8 29 0.5688 A9 31 0.3452 A10 33.5 0.3191 A11 35 0.3494 A12 22.5 0.6038 A13 20 0.4618 A14 18 0.6635
下载: 导出CSV
-
[1] 夏国清, 栾添添, 孙明晓, 等. 基于主成分约简和突变级数的舰载机出动能力综合评估方法[J]. 系统工程与电子技术, 2018, 40(2): 330-337.XIA G Q, LUAN T T, SUN M X, et al. Reduction and catastrophe progression evaluation method for sortie generation of carrier aircraft[J]. Systems Engineering and Electronics, 2018, 40(2): 330-337(in Chinese). [2] WEISS L G. Autonomous robots in the fog of war[J]. IEEE Spectrum, 2011, 48(8): 30-57. doi: 10.1109/MSPEC.2011.5960163 [3] 袁培龙, 韩维, 苏析超, 等. 不确定环境下舰载机保障预反应式动态调度优化[J]. 系统工程与电子技术, 2019, 41(6): 1265-1277.YUAN P L, HAN W, SU X C, et al. Predictive-reactive dynamic scheduling strategy for carrier aircraft support in uncertain environment[J]. Systems Engineering and Electronics, 2019, 41(6): 1265-1277(in Chinese). [4] CLARE A S, RYAN J C, JACKSON K F, et al. Innovative systems for human supervisory control of unmanned vehicles[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2012, 56(1): 531-535. doi: 10.1177/1071181312561110 [5] 刘翱, 刘克. 舰载机保障作业调度问题研究进展[J]. 系统工程理论与实践, 2017, 37(1): 49-60.LIU A, LIU K. Advances in carrier-based aircraft deck operation scheduling[J]. System Engineering-Theory & Practic, 2017, 37(1): 49-60(in Chinese). [6] RYAN J C, CUMMINGS M L. A systems analysis of the introduction of unmanned aircraft into aircraft carrier operations[J]. IEEE Transactions on Human-Machine Systems, 2016, 46(2): 209-220. doi: 10.1109/THMS.2014.2376355 [7] 苗秀梅. 国外舰载无人机技术的发展动向与分析[J]. 舰船电子工程, 2013, 33(12): 18-22.MIAO X M. Development trend and analysis of the ship-based UAV technology abroad[J]. Ship Electronic Engineering, 2013, 33(12): 18-22(in Chinese). [8] 张智, 林圣琳, 邱兵, 等. 舰载机牵引系统甲板调运避碰路径规划[J]. 系统工程与电子技术, 2014, 36(8): 1551-1557.ZHANG Z, LIN S L, QIU B, et al. Collision avoidance path planning of carrier aircraft traction system in dispatching on deck[J]. System Engineering and Electronics, 2014, 36(8): 1551-1557(in Chinese). [9] ZHANG Z, LIN S, DONG R, et al.Designing a human-computer cooperation decision planning system for aircraft carrier deck scheduling[C]//AIAA Infortech and Aerospace.Reston: AIAA, 2015. [10] 苏析超, 韩维, 萧卫, 等. 基于Memetic算法的舰载机舰面一站式保障调度[J]. 系统工程与电子技术, 2016, 38(10): 2303-2309.SU X C, HAN W, XIAO W, et al. Pit-stop support scheduling on deck of carrier plane based on Memetic algorithm[J]. Systems Engineering and Electronics, 2016, 38(10): 2303-2309(in Chinese). [11] LI B, WANG K, SHAO Z. Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3263-3274. doi: 10.1109/TITS.2016.2546386 [12] LIU J, HAN W, PENG H, et al. Trajectory planning and tracking control for towed carrier aircraft system[J]. Aerospace Science and Technology, 2019, 84: 830-838. doi: 10.1016/j.ast.2018.11.027 [13] 刘洁, 韩维, 徐卫国, 等. 基于滚动时域的舰载机甲板运动轨迹跟踪最优控制[J]. 航空学报, 2019, 40(8): 175-200.LIU J, HAN W, XU W G, et al. Optimal path tracking control of carrier-based aircraft on the deck based on RHC[J]. Acta Aeronauticaet Astronautica Sinica, 2019, 40(8): 175-200(in Chinese). [14] WU Y, QU X J. Obstacle avoidance and path planning for carrier aircraft launching[J]. Chinese Journal of Aeronautics, 2015, 28(3): 695-703. doi: 10.1016/j.cja.2015.03.001 [15] 李晓杰, 谢君. 基于赋权Voronoi图的舰载机飞行甲板调运路径规划[J]. 舰船电子工程, 2016, 36(8): 42-47.LI X J, XIE J. Path planning of carrier-borne aircrafts on flight deck motion schedule based on assigned weights Voronoi diagram[J]. Ship Electronic Engineering, 2016, 36(8): 42-47(in Chinese). [16] ZHANG J, YU J, QU X, et al.Path planning for carrier aircraft based on geometry and dijkstra's algorithm[C]//Proceedings of the 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE).Piscataway: IEEE Press, 2017: 115-119. [17] 刘亚杰, 李忠猛, 陈晓山. 考虑空间约束的机库舰载机调运路径规划方法[J]. 海军工程大学学报, 2014, 26(3): 100-103.LIU Y J, LI Z M, CHEN X S. Path planning for transferring shipborne aircraft restricted to hangar space[J]. Journal of Naval University of Engineering, 2014, 26(3): 100-103(in Chinese). [18] 王国庆. 舰载机甲板调度路径优化方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2012: 67-72.WANG G Q.Optimization method of aircraft scheduling path on deck[D].Harbin: Harbin Engineering University, 2012: 67-72(in Chinese). [19] WU Y, QU X J. Path planning for taxi of carrier aircraft launching[J]. Science China Technological Sciences, 2013, 56(6): 1561-1570. doi: 10.1007/s11431-013-5222-5 [20] 张智, 林圣琳, 夏桂华, 等. 舰载机甲板调运过程避碰路径规划研究[J]. 哈尔滨工程大学学报, 2014, 35(1): 9-15.ZHANG Z, LIN S L, XIA G H, et al. Collision avoidance path planning for an aircraft in scheduling process on deck[J]. Journal of Harbin Engineering University, 2014, 35(1): 9-15(in Chinese). [21] 韩维, 司维超, 丁大春, 等. 基于聚类PSO算法的舰载机舰面多路径动态规划[J]. 北京航空航天大学学报, 2013, 39(5): 610-614. https://bhxb.buaa.edu.cn/CN/Y2013/V39/I5/610HAN W, SI W C, DING D C, et al. Multi-routes dynamic planning on deck of carrier plane based on clustering PSO[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5): 610-614(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2013/V39/I5/610 [22] WU Y, HU N, QU X J. A general trajectory optimization method for aircraft taxiing on flight deck of carrier[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(4): 1340-1353. doi: 10.1177/0954410017752224 [23] LI Y Y, ZHU Y F, LI Q. Analysis of aircraft path planning optimal on carrier flight deck[J]. Advanced Materials Research, 2013, 664: 1122-1127. doi: 10.4028/www.scientific.net/AMR.664.1122 [24] RYAN J C, BANERJEE A G, CUMMINGS M L, et al. Comparing the performance of expert user heuristics and an integer linear program in aircraft carrier deck operations[J]. Cybernetics, 2014, 44(6): 761-773. [25] SEBOK A, WICKENS C, SARTER N, et al. The automation design advisor tool (ADAT): Development and validation of a model-based tool to support flight deck automation design for nextgen operations[J]. Human Factors and Ergonomics in Manufacturing & Service Industries, 2012, 22(5): 378-394. doi: 10.1002/hfm.20389 [26] 吴旭忠, 唐胜景, 郭杰, 等. 基于滚动时域控制的再入轨迹跟踪制导律[J]. 系统工程与电子技术, 2014, 36(8): 1602-1608.WU X Z, TANG S J, GUO J, et al. Trajectory tracking guidance law for reentry based on receding horizon control[J]. Systems Engineering and Electronics, 2014, 36(8): 1602-1608(in Chinese). [27] 祁晓明, 魏瑞轩, 沈东, 等. 基于运动目标预测的多无人机分布式协同搜索[J]. 系统工程与电子技术, 2010, 36(12): 2417-2425.QI X M, WEI R X, SHEN D, et al. Distributed cooperative search methods of multi-UAV based on prediction of moving targets[J]. Systems Engineering and Electronics, 2010, 36(12): 2417-2425(in Chinese). 期刊类型引用(7)
1. 王玉杰,陈清阳,高显忠,邓小龙,侯中喜. 无人机动态撞网回收制导控制方法与飞行试验. 北京航空航天大学学报. 2025(02): 487-497 .  本站查看
本站查看2. 杨伦. 面向复杂任务的无人机飞行轨迹抖动抑制方法研究. 科技资讯. 2025(02): 54-56 .  百度学术
百度学术3. 姚丽萍,陈阳,戴卓辰,张军辉,李明生,谢守勇. 基于模型预测控制的静液压变速器转速控制研究. 西南大学学报(自然科学版). 2024(10): 188-199 . 百度学术4. 吴秋实,郭杰,康振亮,张宝超,王浩凝,唐胜景. 基于γ随机搜索策略的无人机集群海上任务分配. 北京航空航天大学学报. 2024(12): 3872-3883 . 本站查看5. 邓嘉宁,李海旭,安强林,沙恩来,王泽,吴宇. 基于指标关联的舰载机出动架次率预测方法. 系统工程与电子技术. 2023(11): 3507-3515 . 百度学术6. 张玲. 基于粒子滤波的无人机自主轨迹视觉导航控制方法研究. 计算机测量与控制. 2022(09): 99-106 . 百度学术7. 胡伟,万文章,陈谋. 基于神经网络和干扰观测器的UAV自动着舰控制. 航空学报. 2022(S1): 119-128 . 百度学术其他类型引用(0)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 1319
- HTML全文浏览量: 107
- PDF下载量: 113
- 被引次数: 7
