



Design of non-cooperative target's safe corridor and optimization of fly-by approach trajectory
-
摘要:
为提高空间非合作目标近距离逼近轨迹的安全性,同时对接近时间及所消耗燃料进行优化,针对空间失效自旋非合作目标近距离接近问题,给出了失效卫星动态安全走廊,并以飞越逼近方式抵达走廊入口,进一步提出了飞越逼近轨迹优化方法。首先,在建立失效卫星自旋模型的基础上,规划了安全区与禁飞区,提出了2种安全走廊的选择依据。其次,采用飞越逼近作为近距离接近方式,以节约燃料和缩短逼近时间为目标对两脉冲机动模型进行优化,选择3种优化算法得到接近轨迹。仿真结果表明:安全走廊的选择与卫星失效自旋的形式、外形以及接口位置有关;在飞越逼近两脉冲机动模型的优化问题中,采用Fgoalattain算法进行优化处理更具优越性。
Abstract:In order to improve the safety of non-cooperative target's close-range approach trajectory, and optimize the approach time and fuel consumption at the same time, this paper designs the dynamic safety corridors of uncontrolled rotating satellite for the proximity to rotating non-cooperative target. The fly-by approach is chosen to reach the corridor entrance and the fly-by approach trajectory optimization method is proposed. First, based on the establishment of an uncontrolled rotating satellite spin model, the safety zone and the keep-out-zone are planned, and the basis for selecting two safety corridors is analyzed. Second, the fly-by approach is used as a close-range approach method, and with the goal of saving fuel and shortening the approach time, the two-pulse maneuver model is optimized and three optimization algorithms are selected to obtain the approach trajectory. The simulation results show that the choice of the safe corridor is related to the form, shape and interface position of the uncontrolled satellite spin. In the optimization problem of fly-by approaching two-pulse maneuver model, it is more advantageous to use the fgoalattain algorithm for optimization.
-

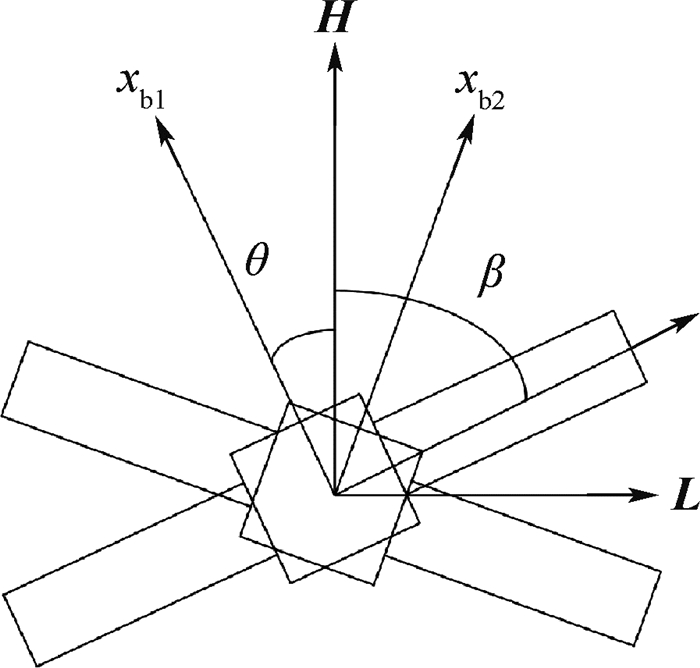
图 4 本体坐标系与计算坐标系关系图
Figure 4. Relationship between ontology coordinate system and computational coordinate system

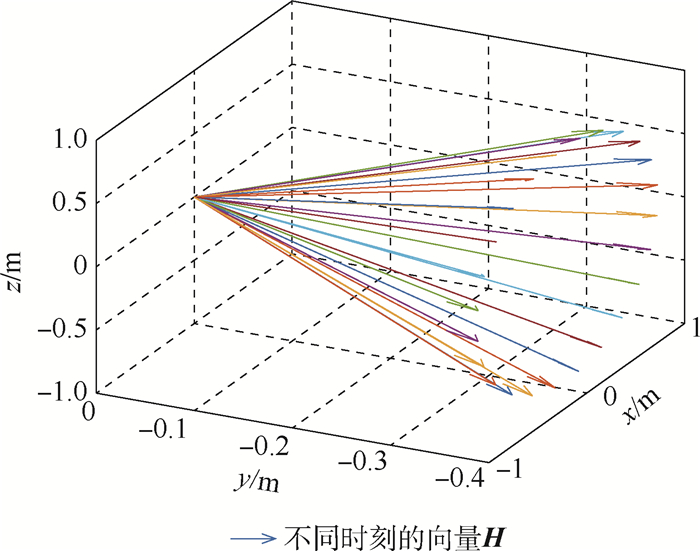
图 5 动量矩矢量在轨道坐标系随时间的变化
Figure 5. Change of momentum moment vector in orbit coordinate system with time

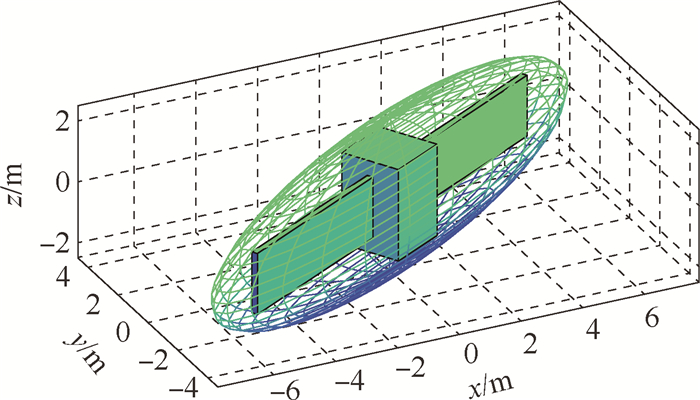
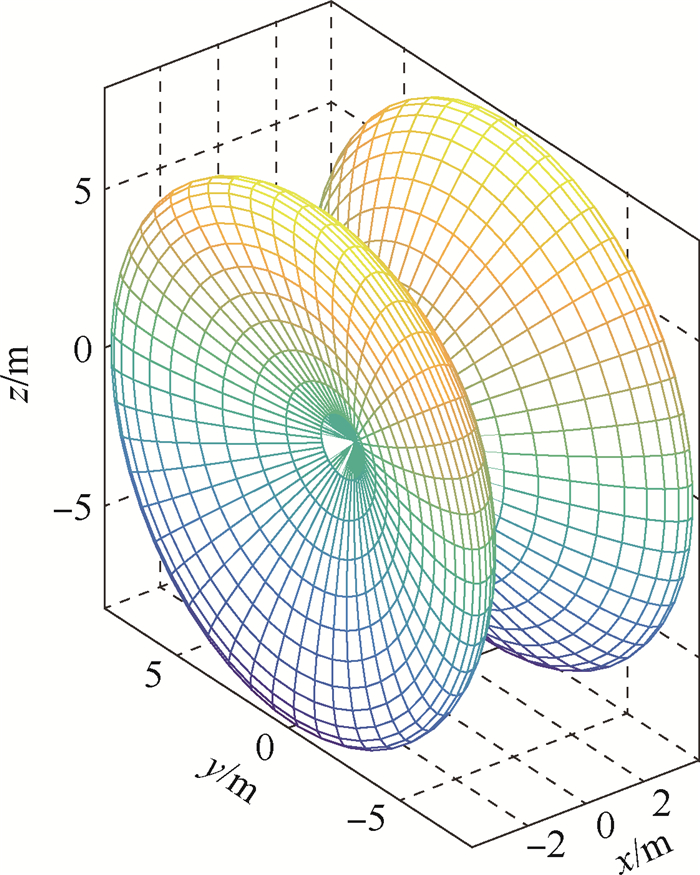
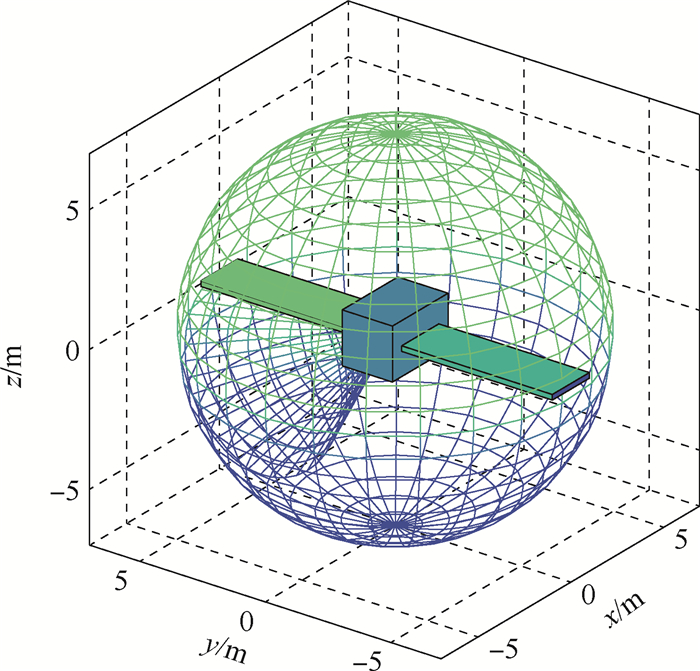
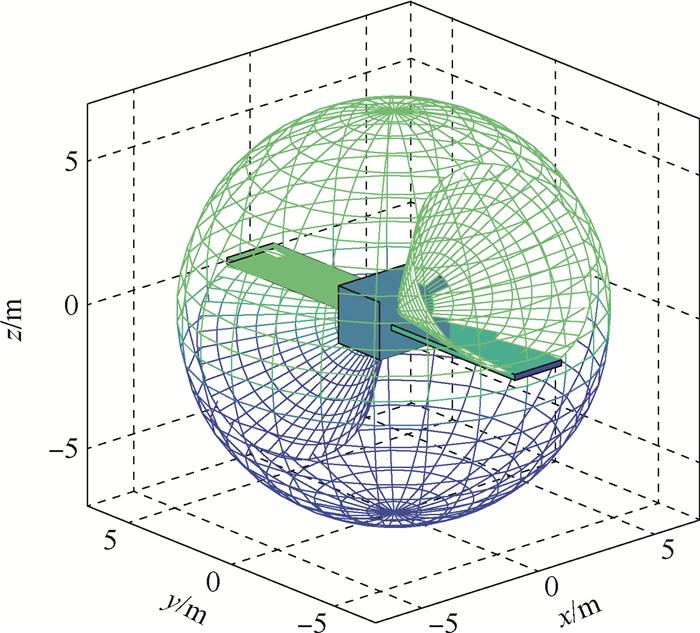
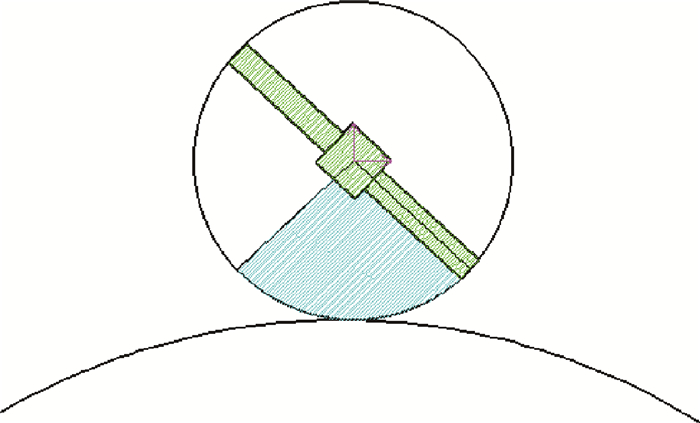
图 10 当H方向变化时不同的走廊示意图
Figure 10. Schematic of different corridors when H direction changes

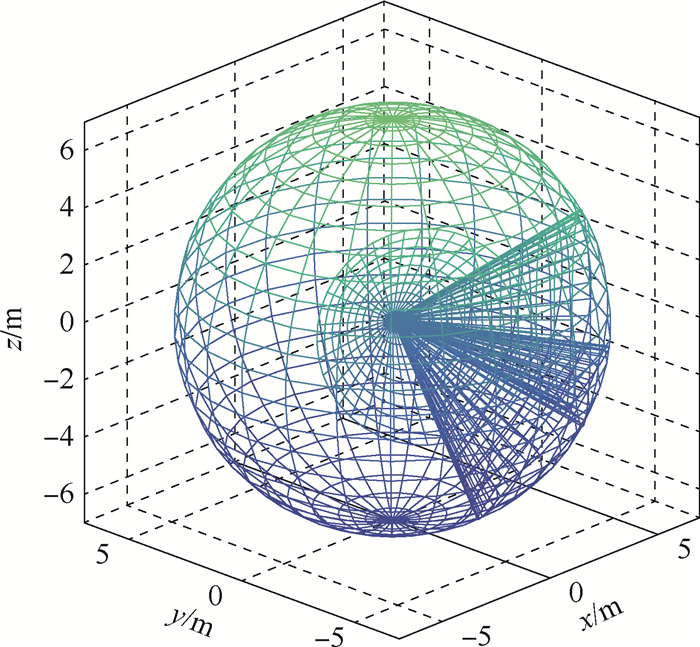
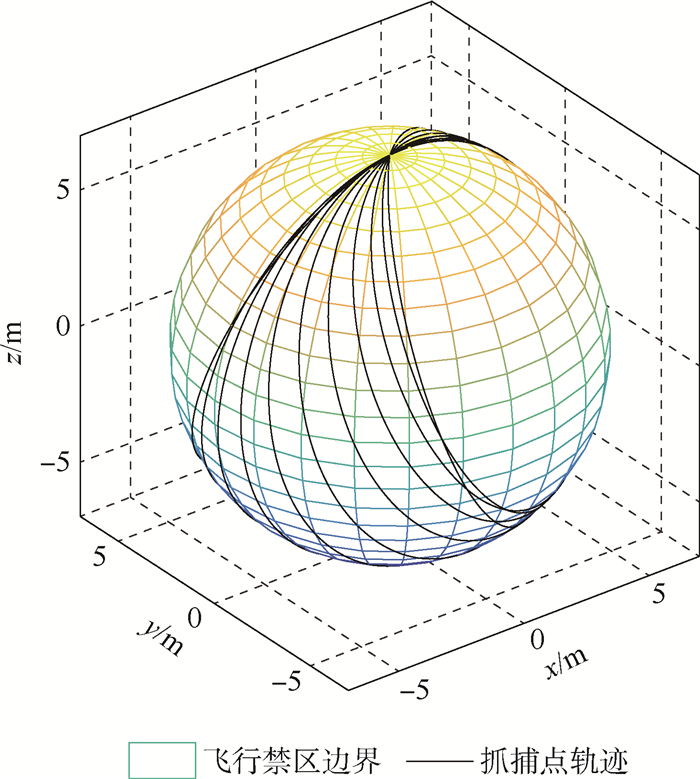
图 15 章动存在时入口在禁飞球上的投影
Figure 15. Projection of entrance to no-fly ball when nutation exists

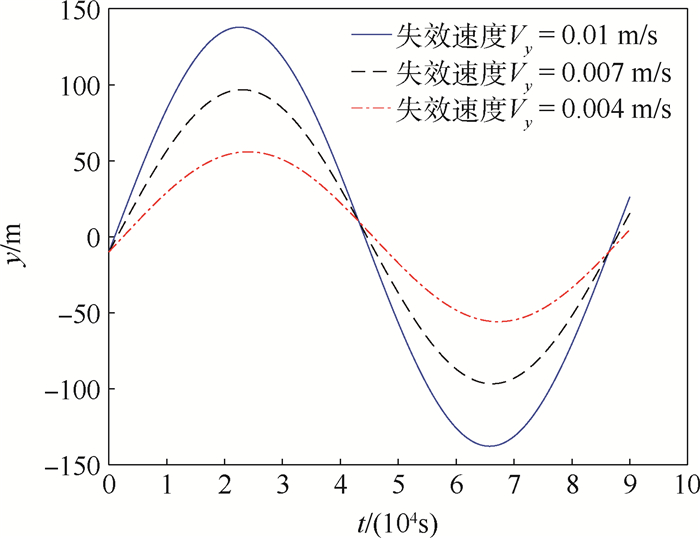
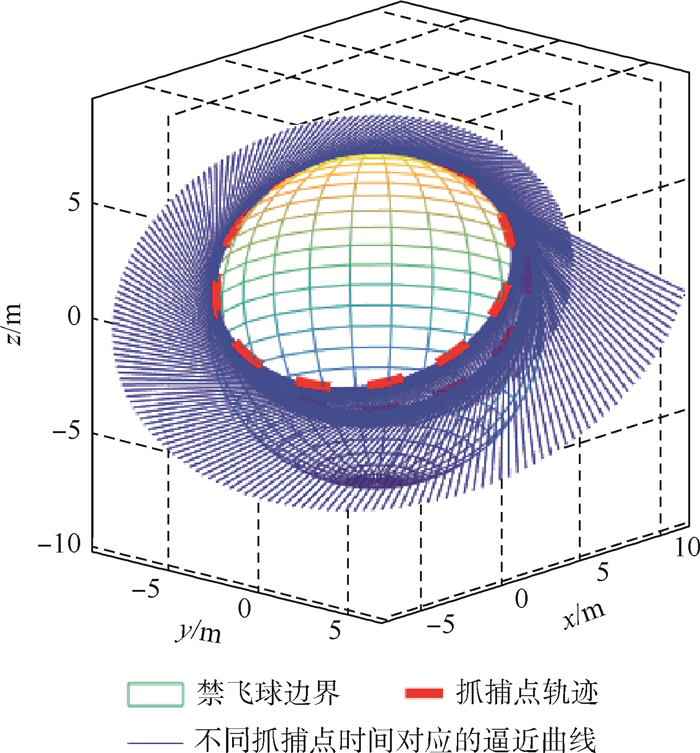
图 16 三维飞越逼近(有章动)初始位置曲线
Figure 16. Initial position curve of 3D fly-by approach (when nutation exists)

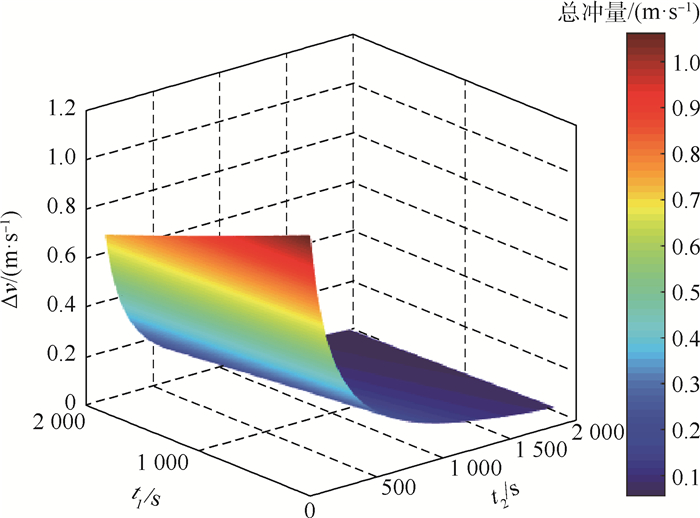
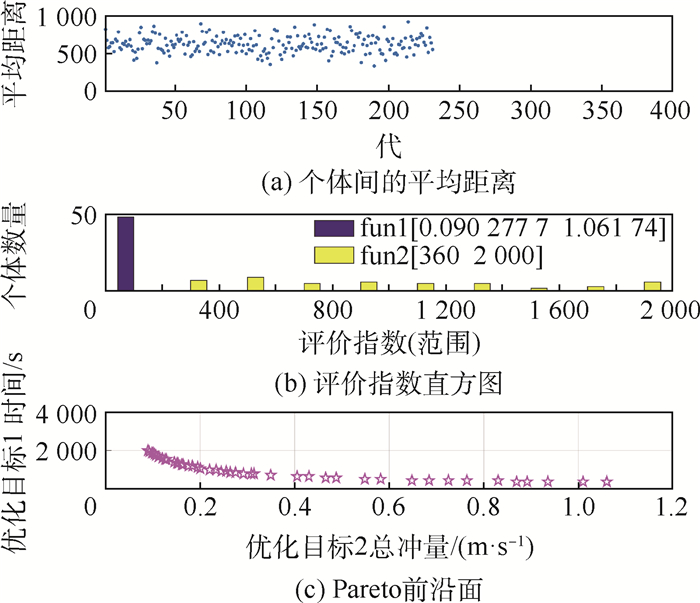
图 17 总冲量与2段转移时间的关系
Figure 17. Relationship between total impulse and two transition time

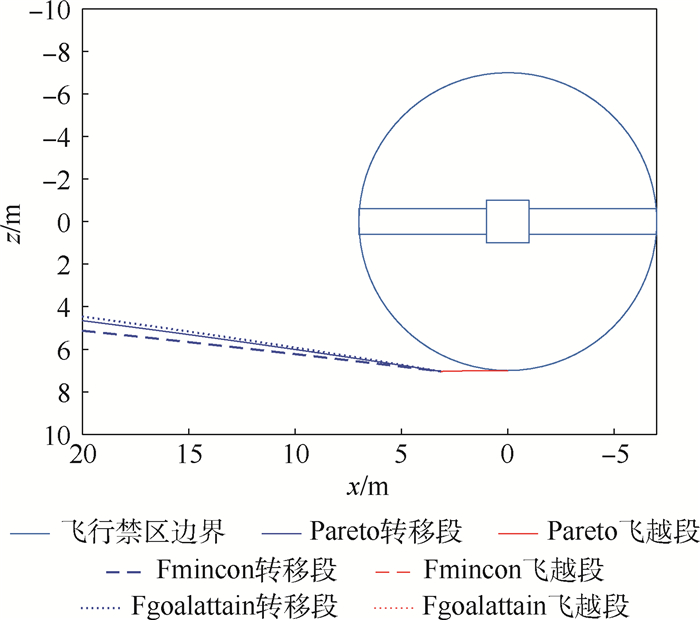
图 20 三种不同优化算法在三维逼近下的结果
Figure 20. Results of three different optimization algorithms under 3D approach
表 1 Pareto所选解集
Table 1. Pareto selected solution set
维数 Δ v/(m·s-1) T/s t1/s t2/s 二维 0.154 745 1 312.043 1 131.516 180.526 7 三维 0.188 1 273.956 1 092.404 181.552  下载: 导出CSV
下载: 导出CSV
表 2 Fmincon算法优化结果
Table 2. Optimization results of Fmincon algorithm
维数 v/(m·s-1) T/s t1/s t2/s 二维 0.286 852 672 180 三维 0.438 6 1 091.5 911.433 2 180.066 8
下载: 导出CSV
表 3 Fgoalattain算法优化结果
Table 3. Optimization results of Fgoalattain algorithm
维数 Δ v/(m·s-1) T/s t1/s t2/s 二维 0.130 6 1 497.5 1 317.5 180 三维 0.156 5 1 497.5 1 317.5 180
下载: 导出CSV
表 4 优化性能对比
Table 4. Optimized performance comparison
性能指标 Gamultiobj Fmincon Fgoalattain 二维仿真时间/s 14 1 1 三维仿真时间/s 1 390 19 3 二维燃料消耗/(m·s-1) 0.154 745 0.286 0.130 6 三维燃料消耗/(m·s-1) 0.188 0.438 6 0.156 5 二维逼近时间/s 1 312.043 852 1 497.5 三维逼近时间/s 1 273.956 1 091.5 1 497.5
下载: 导出CSV
-
[1] 陈小前, 袁建平, 赵勇, 等. 航天器在轨服务技术[M]. 北京: 中国宇航出版社, 2009: 24-28.CHEN X Q, YUAN J P, ZHAO Y, et al. On-orbit service technology of spacecraft[M]. Beijing: China Aerospace Press, 2009: 24-28(in Chinese). [2] 李侃. 全球首个商业在轨服务航天器任务拓展飞行器-1[J]. 国际太空, 2019(11): 4-7. doi: 10.3969/j.issn.1009-2366.2019.11.002LI K. The world's first commercial on orbit service spacecraft MEV-1[J]. Space International, 2019(11): 4-7(in Chinese). doi: 10.3969/j.issn.1009-2366.2019.11.002 [3] 解永春, 陈长青. 一类禁飞区后方安全撤离轨迹的设计方法研究[J]. 空间控制技术与应用, 2009(3): 1-5. doi: 10.3969/j.issn.1674-1579.2009.03.001XIE Y C, CHEN C Q. Safe retreat trajectory design for rendezvous behind a keep-out-zone[J]. Aerospace Control and Application, 2009(3): 1-5(in Chinese). doi: 10.3969/j.issn.1674-1579.2009.03.001 [4] 李学辉, 宋申民. 慢旋非合作目标快速绕飞避碰控制[J]. 控制与决策, 2018(9): 1612-1618. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201809011.htmLI X H, SONG S M. Slowly rotating non-cooperative target fast fly-around collision avoidance control[J]. Control and Design, 2018(9): 1612-1618(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201809011.htm [5] 石昊. 非合作目标接近轨迹设计与安全评估方法研究[D]. 北京: 北京航空航天大学, 2017: 11-15.SHI H. Research on approach trajectory design and safety assessment method of non cooperative target[D]. Beijing: Beihang University, 2017: 11-15(in Chinese). [6] XU W F, YAN L, HU Z H, et al. Area-oriented coordinated trajectory planning of dual-arm space robot for capturing a tumbling target[J]. Chinese Journal of Aeronautics, 2019, 32(9): 2151-2163. doi: 10.1016/j.cja.2019.03.018 [7] 王逍, 温昶煊, 赵育善, 等. 翻滚目标安全走廊内的碰撞可能性判断方法[J]. 哈尔滨工业大学学报, 2018, 50(4): 94-101. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201804015.htmWANG X, WEN C X, ZHAO Y S, et al. Collision possibility detection in the safe corridor of a tumbling target[J]. Journal of Harbin Institute of Technology, 2018, 50(4): 94-101(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201804015.htm [8] 石昊, 赵育善, 师鹏. 航天器近距离相对运动的轨迹偏差分析[J]. 北京航空航天大学学报, 2017, 43(3): 636-644. doi: 10.13700/j.bh.1001-5965.2016.0641SHI H, ZHAO Y S, SHI P. Analysis of trajectory deviation for spacecraft relative motion in close-range[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3): 636-644(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0641 [9] WEN C X, GURFIL P. Relative reachable domain for spacecraft with initial state uncertainties[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(3): 462-473. doi: 10.2514/1.G000721 [10] WEN C X, MA J. Reachable domain for satellite relative motion along elliptic orbit with uncertainty and process noise[J]. Proceedings of the Institution of Mechanical Engineers. Part G. Journal of Aerospace Engineering, 2020, 234(7): 095441001990072. [11] ZAGARIS C, ROMANO M. Reachability analysis of planar spacecraft docking with rotating body in close proximity[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(6): 1416-1422. doi: 10.2514/1.G003389 [12] WEN C X, ZHAO Y S, LI B J, et al. Solving the relative Lambert's problem and accounting for its singularities[J]. Acta Astronautica, 2014, 97: 122-129. doi: 10.1016/j.actaastro.2013.12.016 [13] 姚玮, 罗建军, 谢剑锋, 等. 连续推力机动轨道优化设计的贝塞尔曲线法[J]. 宇航学报, 2019, 40(11): 28-39. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201911004.htmYAO W, LUO J J, XIE J F, et al. A novel Bezier method for continuous thrust maneuver orbit optimal design[J]. Journal of Astronautics, 2019, 40(11): 28-39(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201911004.htm [14] BREGER L S, HOW J P. Safe trajectories for autonomous rendezvous of spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1478-1489. doi: 10.2514/1.29590 [15] 梁立波. 近距离导引段交会轨迹安全性的定量评价和设计优化方法[D]. 长沙: 国防科学技术大学, 2011: 60.LIANG L B. Quantitative performance and design optimization approach of close-range rendezvous trajectory safety[D]. Changsha: National University of Defense Science and Technology, 2011: 60(in Chinese). [16] 武冠群. 在轨服务航天器交会轨迹优化与近距离安全接近控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2019: 30-33.WU G Q. Research on rendezvous trajectory optimization and close-range safe approach control of spacecraft for on-orbit servicing[D]. Harbin: Harbin Institute of Technology, 2019: 30-33(in Chinese). [17] 赵育善, 师鹏. 航天器飞行动力学建模理论与方法[M]. 北京: 北京航空航天大学出版社, 2012: 52-53.ZHAO Y S, SHI P. Modeling theory and method of spacecraft flight dynamics[M]. Beijing: Beihang University Press, 2012: 52-53(in Chinese). [18] 王石, 祝开建, 戴金海, 等. 用EA求解非固定时间轨道转移和拦截问题[J]. 国防科技大学学报, 2001, 23(5): 1-4. https://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ200105000.htmWANG S, ZHU K J, DAI J H, et al. Solving orbital transformation and interception problems based on EA[J]. Journal of National University of Defense Technology, 2001, 23(5): 1-4(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ200105000.htm [19] 马昌凤, 柯艺芬, 谢亚君. 最优化计算方法及其MATLAB程序实现[M]. 北京: 国防工业出版社, 2015: 51-57.MA C F, KE Y F, XIE Y J. Optimization calculation method and MATLAB program realization[M]. Beijing: National Defense Industry Press, 2015: 51-57(in Chinese). -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 620
- HTML全文浏览量: 142
- PDF下载量: 69
- 被引次数: 0
