



Dynamic automatic docking technology of gas-liquid composite umbilical connector for launch vehicle
-
摘要:
为实现未来重型运载火箭地面组合连接器与箭上接口的自动对接,提高发射准备流程安全性、可靠性,降低人员保障要求,开展了组合连接器自动对接的技术研究及总体策略分析,提出了由检测、智能控制、位姿调整系统组成的技术方案及非接触式检测+主动位姿调整+被动随动的自动对接策略,并开展了组合连接器自动对接试验系统研制,进行了组合连接器自动对接、低温加注、自动分离等全流程试验验证工作。结果表明:自动对接装置检测、智能控制、位姿调整等各项功能正常,自动对接策略准确、可行,解决了大载荷组合连接器在箭上接口大范围、高速运动条件下的自动对接难题,综合跟踪范围达±600 mm,综合跟踪速度达500 mm/s,各综合工况下完成自动对接时间约为3~5 min。
Abstract:In order to realize the automatic docking of ground composite umbilical connector for heavy launch vehicle with rocket interface, enhance the safety and reliability, and reduce safeguards of launch preparation process, first, the technology and overall strategy of automatic docking of composite umbilical connector were analyzed in this paper, the technical scheme which is composed of detection, control and pose adjustment system was proposed, and the strategy of non-contact detecting, active tracking and passive servo was designed. Then, the experimental automatic docking system of composite umbilical connector was developed. Finally, a series of experimental verification work were carried out including automatic docking, low temperature filling and automatic separating. The results show that the detection, control and pose adjustment function of the automatic docking equipment are normal, the automatic docking strategy is accurate and feasible, the automatic docking problem of heavy-load composite umbilical connector under large scale and high speed condition is solved, the comprehensive tracking range reaches±600 mm, the comprehensive tracking speed reaches 500 mm/s, and the time for automatic docking under various operation conditions is about 3-5 min.
-
Key words:
- automatic docking /
- composite umbilical connector /
- docking strategy /
- dynamic tracking /
- launch vehicle
-

图 1 组合连接器自动对接技术应用部位
Figure 1. Application site of composite umbilical connector's automatic docking technology
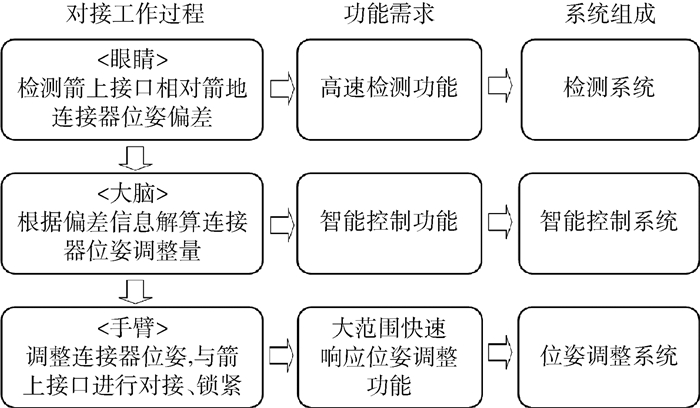
图 2 组合连接器自动对接技术路线
Figure 2. Automatic docking technical route of composite umbilical connector

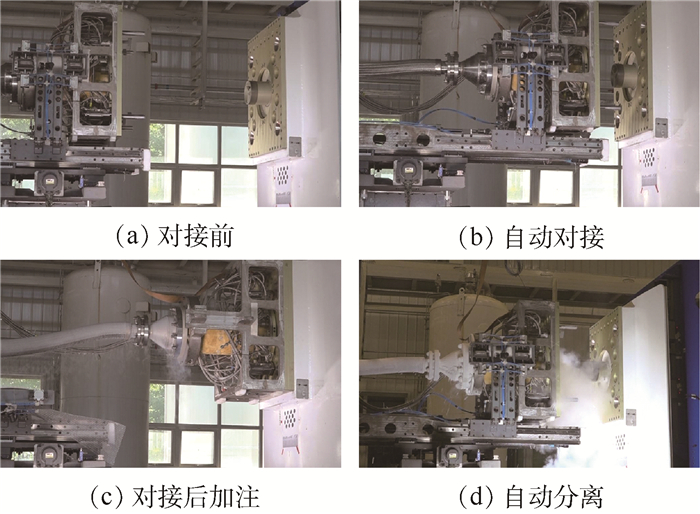
图 3 组合连接器自动对接试验系统实物
1—自动对接装置;2—组合连接器;3—箭上接口;4—箭体模拟运动台。
Figure 3. Practical experimental automatic docking system of composite umbilical connector
表 1 自动对接策略分析
Table 1. Automatic docking strategy analysis
项目 策略 分析 检测环节 ①非接触式检测:采用光学、激光等传感器 应用普遍、技术成熟、对箭体无附加载荷;但受外界雨、雪等环境影响 ②接触式检测:对接装置、箭上接口设计机械定位结构 结构简单;但机械定位对箭体产生附加载荷 位姿调整环节 ①主动调整:同时调整3平动、3转动自由度 调整精度高;但动作多、过程复杂,控制难度大 ②主动调整:同时调整3平动自由度,3转动自由度自适应调整 平动自由度调整精度较高,控制简单;但需设计转动自由度偏差自适应调整结构 ③被动调整:由对接装置、箭上接口机械定位 结构简单,无复杂控制,可靠性高;但对箭体产生附加载荷 随动控制环节 ①主动随动:连接器与箭上接口对接锁紧后,对接装置与连接器不分离,加注过程同步随动 实时控制、流程简单;但检测、控制系统长时间工作,可靠性要求高 ②被动随动:连接器与箭上接口对接锁紧后,与对接装置分离,加注过程同步随动 降低检测、控制系统长时间工作可靠性要求;但需设计对接装置与连接器的解脱机构,自动分离时需进行二次对接  下载: 导出CSV
下载: 导出CSV
表 2 自动对接装置主要设计技术指标
Table 2. Main technical parameters of automatic docking equipment
指标 数值 检测距离/mm 400~2 000 检测精度/mm 0.5~3 检测频率/Hz 200 综合跟踪范围/mm ±600 综合跟踪速度/(mm·s-1) ±725 综合跟踪误差/mm 不大于±30 承载能力/kg 150 整机质量/kg 750
下载: 导出CSV
-
[1] 何家声. 航天发射地面支持技术[M]. 北京: 北京理工大学出版社, 2015.HE J S. Space launch ground support technology[M]. Beijing: Beijing Institute of Technology Press, 2015(in Chinese). [2] 符锡理. 运载火箭脐带自动脱落连接器[J]. 导弹与航天运载技术, 1988(9): 62-69.FU X L. Umbilical automatic dis-connector of launch vehicles[J]. Missiles and Space Vehicles, 1988(9): 62-69(in Chinese). [3] DANDAGE S R, HERMAN N A, GODFREY S E, et al. Design and development of the space shuttle tail service masts: NASA-1979-21357[R]. Washington, D.C. : NASA, 1979. [4] NASA. The perfect mate for safe fueling[EB/OL]. (2004-01-01)[2016-03-20]. [5] GOSSELIN A M. Automated ground umbilical systems (AGUS) project: NASA-20130011368[R]. Washington, D.C. : NASA, 2007. [6] MANLEY W C, TAMASY G J, MALONEY P. Ares I linear mate umbilical plate and collet: NASA-N20130008828[R]. Washington, D.C. : NASA, 2012. [7] 郑国昆, 王小军, 李道平. 基于运载火箭加泄连接器自动对接系统的控制流程研究[J]. 导弹与航天运载技术, 2015(1): 25-28.ZHENG G K, WANG X J, LI D P. Study on control flow based on auto-docking system of launch vehicle fuel connector[J]. Missiles and Space Vehicles, 2015(1): 25-28(in Chinese). [8] 白文龙, 李泳峄, 翟旺, 等. 运载火箭连接器自动对接技术应用分析[J]. 导弹与航天运载技术, 2017(6): 65-71.BAI W L, LI Y Y, ZHAI W, et al. Application analysis of automated mating technique used on launch vehicle filling connectors[J]. Missiles and Space Vehicles, 2017(6): 65-71(in Chinese). [9] 李泳峄, 吴新跃, 翟旺, 等. 基于柔性直角坐标机器人的火箭连接器自动对接过程分析及试验[J]. 导弹与航天运载技术, 2019(1): 116-121.LI Y Y, WU X Y, ZHAI W, et al. Analysis and experiment on the launch vehicle's umbilical connector autonomous mating process based on flexible rectangular robot[J]. Missiles and Space Vehicles, 2019(1): 116-121(in Chinese). [10] 李泳峄, 翟旺, 张国栋, 等. 火箭推进剂输送连接器自动对接装置及其动态特性研究[J]. 机床与液压, 2020, 48(4): 13-18.LI Y Y, ZHAI W, ZHANG G D, et al. Research on dynamic characteristics of the autonomous mating equipment of launch vehicle's umbilical connector[J]. Machine Tool & Hydraulics, 2020, 48(4): 13-18(in Chinese). [11] 黄小妮, 顿向明, 张育林, 等. 运载火箭推进剂加注自动对接与脱离机器人本体设计[J]. 机器人, 2010, 32(2): 145-149.HUANG X N, DUN X M, ZHANG Y L, et al. The auto-docking and auto-separating mechanism designed for the rocket fuel loading[J]. Robot, 2010, 32(2): 145-149(in Chinese). [12] 游嘉伟, 顿向明, 山磊, 等. 运载火箭推进剂加注机器人机构设计[J]. 机电一体化, 2016, 22(4): 41-44.YOU J W, DUN X M, SHAN L, et al. Mechanism design of carrier rocket propellant filling robot[J]. Mechatronics, 2016, 22(4): 41-44(in Chinese). [13] 张鑫, 李志刚, 徐华, 等. 运载火箭自动对接连接器液压系统研究[J]. 兵器装备工程学报, 2016, 37(3): 146-150.ZHANG X, LI Z G, XU H, et al. Research of hydraulic system of automatic butt-joint connector for carrier booster[J]. Journal of Ordnance Equipment Engineering, 2016, 37(3): 146-150(in Chinese). [14] 董霞, 陈康宁, 李天石. 机械控制理论基础[M]. 西安: 西安交通大学出版社, 2005.DONG X, CHEN K N, LI T S. Fundamentals of mechanical control theory[M]. Xi'an: Xi'an Jiaotong University Press, 2005(in Chinese). [15] 刘金琨. 先进PID控制MATLAB仿真[M] 4版. 北京: 电子工业出版社, 2016.LIU J K. Advanced PID control and MATLAB simulation[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2016(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 750
- HTML全文浏览量: 128
- PDF下载量: 108
- 被引次数: 0
