



-
摘要:
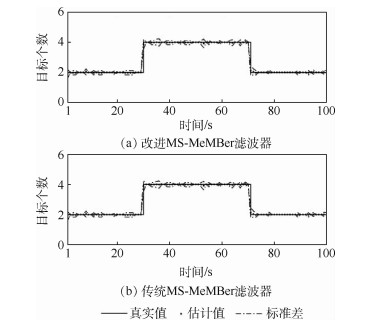
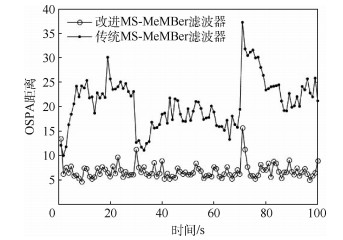
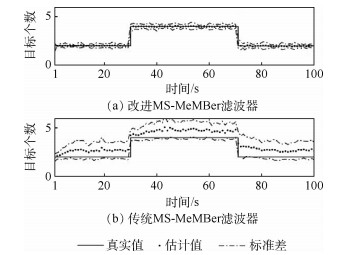
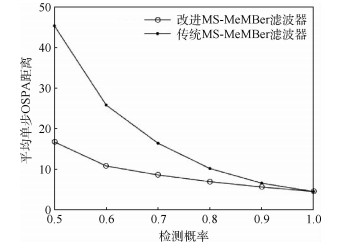
针对高杂波密度场景下,传统多传感器多目标多伯努利(MS-MeMBer)滤波器存在的量测划分假设质量下降、势估计结果出现偏差等问题,提出了一种基于杂波量测集约束的改进MS-MeMBer滤波器。首先,通过将杂波量测集的影响引入到更新过程中,优化了目标量测集的权重,并给出了杂波场景下的单目标多传感器似然函数。然后,通过两步贪婪划分机制,得到了改进的多传感器量测划分假设。通过仿真将所提方法与传统MS-MeMBer滤波器进行了比较,实验结果表明:在高杂波密度场景下,改进MS-MeMBer滤波器具有更优的多目标跟踪性能。
-
关键词:
- 多目标跟踪 /
- 多传感器多目标多伯努利(MS-MeMBer)滤波器 /
- 杂波量测集 /
- 量测划分假设 /
- 高杂波密度
Abstract:To solve the problems existing in the traditional Multi-Sensor Multi-Target Multi-Bernoulli (MS-MeMBer) filter in the high clutter density scene, such as poor quality of measurement partitioning hypothesis and biases of cardinality estimation, an improved MS-MeMBer filter based on clutter measurement set constraint is proposed. By introducing the influence of the clutter measurement set into the update step, the weight of the target measurement set is optimized and the single target multi-sensor likelihood function in the clutter scene is given. After that, the improved multi-sensor measurement partitioning hypothesis is obtained by two-step greedy partition mechanism. The proposed method is compared with the traditional MS-MeMBer filter by simulation. The experimental results show that the proposed method has better multi-target tracking performance in high clutter density scene.
-
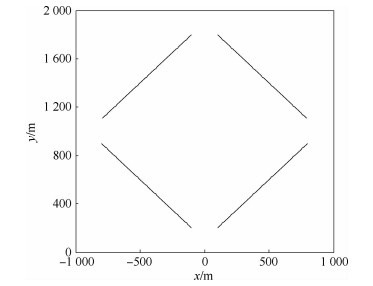
表 1 目标真实运动情况
Table 1. True movement of targets
初始状态 存活时间/s [-100 m,-10 m/s,1 800 m,-10 m/s] 1~70 [100 m,10 m/s,1 800 m,-10 m/s] 1~70 [-100 m,-10 m/s,200 m,10 m/s] 30~100 [100 m,10 m/s,200 m,10 m/s] 30~100  下载: 导出CSV
下载: 导出CSV
表 2 平均单步运行时间
Table 2. Average single-step running time
杂波密度λk 平均单步运行时间/ms 改进MS-MeMBer滤波器 传统MS-MeMBer滤波器 10 23.54 23.22 50 28.85 28.09 100 32.46 33.10
下载: 导出CSV
-
[1] REID D. An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1979, 24(6): 843-854. doi: 10.1109/TAC.1979.1102177 [2] KIRUBARAJAN T, BAR-SHALOM Y. Probabilistic data association techniques for target tracking in clutter[J]. Proceedings of the IEEE, 2004, 92(3): 536-557. doi: 10.1109/JPROC.2003.823149 [3] MAHLER R. Statistical multisource-multitarget information fusion[M]. Norwood: Artech House Press, 2007. [4] 王颖. 一种鲁棒的多目标概率假设密度算法[J]. 火力与指挥控制, 2018, 43(8): 143-146. doi: 10.3969/j.issn.1002-0640.2018.08.030WANG Y. A robust multi-target probability hypothesis density algorithm[J]. Fire Control & Command Control, 2018, 43(8): 143-146(in Chinese). doi: 10.3969/j.issn.1002-0640.2018.08.030 [5] VO B T, VOB N, CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553-3567. doi: 10.1109/TSP.2007.894241 [6] VO B T, VO B N, CANTONI A. On multi-Bernoulli approximations to the Bayes multi-target filter[C]//Proceeding of the International Conference on Information Fusion, 2007: 1-10. [7] 陈树新, 洪磊, 吴昊, 等. 学生t混合势均衡多目标多伯努利滤波器[J]. 电子与信息学报, 2019, 41(10): 2457-2463. doi: 10.11999/JEIT181121CHEN S X, HONG L, WU H, et al. Student's t mixture cardinality balanced multi-target multi-Bernoulli filter[J]. Journal of Electronics & Information Technology, 2019, 41(10): 2457-2463(in Chinese). doi: 10.11999/JEIT181121 [8] 王佰录, 易伟, 李溯琪, 等. 分布式多目标伯努利滤波器的网络共识技术[J]. 信号处理, 2018, 34(1): 1-12.WANG B L, YI W, LI S Q, et al. Consensus for distributed multi-Bernoulli filter[J]. Journal of Signal Processing, 2018, 34(1): 1-12(in Chinese). [9] 彭华甫, 黄高明, 田威. 随机有限集理论及其在多目标跟踪中的应用和实现[J]. 控制与决策, 2019, 34(2): 225-232.PENG H F, HUANG G M, TIAN W. Random finite set: Theory, application and implementation for multi-target tracking[J]. Control and Decision, 2019, 34(2): 225-232(in Chinese). [10] 冯新喜, 迟珞珈, 王泉, 等. 基于箱粒子滤波的混合标签多伯努利跟踪算法[J]. 控制与决策, 2020, 35(2): 507-512.FENG X X, CHI L J, WANG Q, et al. A hybrid labeled multi-Bernoulli tracking algorithm based on box particle filter[J]. Control and Decision, 2020, 35(2): 507-512(in Chinese). [11] MAHLER R. The multisensor PHD filter: I. General solution via multitarget calculus[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2009, 7336: 73360E-1-73360E-12. doi: 10.1117/12.818024 [12] MAHLER R. Approximate multisensor CPHD and PHD filters[C]//Proceedings of the International Conference on Information Fusion, 2010: 1-8. [13] NANNURU S, BLOUIN S, COATES M, et al. Multisensor CPHD filter[J]. IEEE Transactions on Aerospace and Electronics Systems, 2016, 52(4): 1834-1854. doi: 10.1109/TAES.2016.150265 [14] SAUCAN A A, COATES M, RABBAT M. A multi-sensor multi-Bernoulli filter[EB/OL]. (2016-09-16)[2020-07-01]. [15] SCHUHMACHER D, VO B T, VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457. doi: 10.1109/TSP.2008.920469 [16] RISTIC B, VO B N, CLARK D. Performance evaluation of multi-target tracking using the OSPA metric[C]//Proceedings of the International Conference on Information Fusion, 2010: 1-7. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 391
- HTML全文浏览量: 45
- PDF下载量: 56
- 被引次数: 0
