



-
摘要:
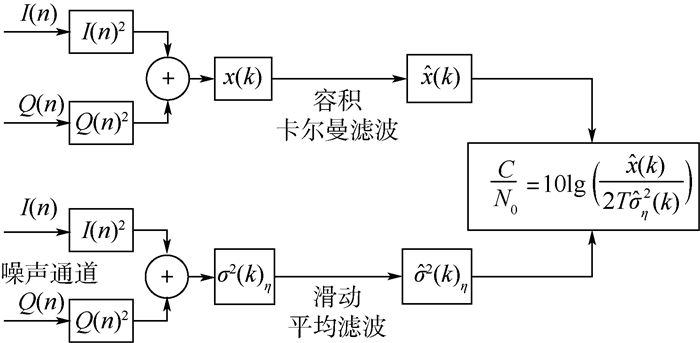
全球导航卫星系统(GNSS)信号的载噪比(CNR)是衡量接收机工作性能的一个重要参数。为了准确得到载噪比估计值,推导并分析了2种常用的GNSS信号载噪比估计方法(方差求和法(VSM)、窄带宽带功率比值法(PRM)),并同时提出一种基于渐消因子容积卡尔曼滤波的自适应载噪比估计方法,比较了3种方法在通常的信号环境下和弱信号环境下的载噪比估计能力。结果显示:在信号较弱环境或信号受到遮挡产生突变等情况时,VSM方法与PRM方法均会产生较大的误差,而自适应载噪比估计方法能准确估计出信号的载噪比。
-
关键词:
- 全球导航卫星系统(GNSS)信号 /
- GNSS接收机 /
- 载噪比(CNR)估计 /
- 容积卡尔曼滤波 /
- 渐消因子
Abstract:The Carrier-to-Noise Ratio (CNR) of Global Navigation Satellite System (GNSS) signals is an important parameter to describe GNSS receiver's performance. In this paper, we derive and analyze two commonly used GNSS signal CNR estimation methods: Variance Summing Method (VSM) and Power Ratio Method (PRM). Meanwhile, we propose an adaptive CNR estimation method which is based on fading factor cubature Kalman filter. We compare the three methods to assess the CNR estimation ability in normal and weak signal environment. The results show that, when signal suddenly changes or signal is weak, the VSM and PRM will produce large estimation errors, while the adaptive CNR estimation methods can still accurately estimate the CNR of signal.
-

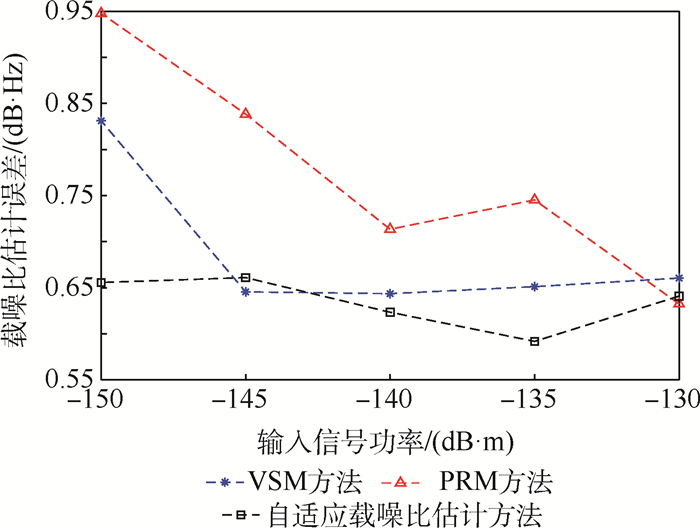
图 3 三种估计方法在载噪比突变环境中的估计误差
Figure 3. Three estimation methods' estimation errors in the environment of abrupt CNR change
表 1 三种算法在不同载噪比环境下的估计误差
Table 1. Estimation errors of three method in different C/N0 environments
载噪比/ (dB·Hz) 载噪比估计误差/(dB·Hz) VSM方法 PRM方法 自适应载噪比估计方法 45 0.54 0.55 0.40 35 0.77 1.03 0.47 25 0.81 1.66 0.52  下载: 导出CSV
下载: 导出CSV
-
[1] 鲁郁. 北斗/GPS双模软件接收机原理与实现技术[M]. 北京: 电子工业出版社, 2016: 197-203.LU Y. Principle and implementation technology of Beidou/GPS dual-mode software receiver[M]. Beijing: Publishing House of Electronics Industry, 2016: 197-203(in Chinese). [2] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2017: 362-364.XIE G. Principles of GPS and receiver design[M]. Beijing: Publishing House of Electronics Industry, 2017: 362-364(in Chinese). [3] 蒋君伟, 段晓辉, 林阳. 一种GPS信号载噪比估计的新算法[J]. 系统仿真学报, 2009, 21(24): 7786-7788. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200924022.htmJIANG J W, DUAN X H, LIN Y. New algorithm for GPS C/N0 estimation[J]. Journal of System Simulation, 2009, 21(24): 7786-7788(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200924022.htm [4] GROVES P D. GPS signal-to-noise measurement in weak signal and high-interference environments[J]. Navigation, 2005, 52(2): 83-94. doi: 10.1002/j.2161-4296.2005.tb01734.x [5] SHARAWI M S, AKOS D M, ALOI D N. GPS C/N0/estimation in the presence of interference and limited quantization levels[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(1): 227-238. doi: 10.1109/TAES.2007.357129 [6] FALLETTI E, PINI M, PRESTI L L, et al. Assessment on low complexity C/N0 estimators based on M-PSK signal model for GNSS receivers[C]//2008 IEEE/ION Position, Location and Navigation Symposium. Piscataway: IEEE Press, 2008: 167-172. [7] LASHLEY M. Modeling and performance analysis of GPS vector tracking algorithms[M]. Auburn: Auburn University, 2009: 318-324. [8] 巴晓辉, 刘海洋, 郑睿, 等. 一种有效的GNSS接收机载噪比估计方法[J]. 武汉大学学报(信息科学版), 2011, 36(4): 457-460. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201104019.htmBA X H, LIU H Y, ZHENG R, et al. An effective carrier-to-noise ratio estimation method for GNSS receivers[J]. Geomatics and Information Science of Wuhan University, 2011, 36(4): 457-460(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201104019.htm [9] 徐昌元, 唐小妹, 倪少杰, 等. 电离层闪烁背景下不同载噪比估计算法的性能分析[J]. 全球定位系统, 2016, 41(5): 23-27. https://www.cnki.com.cn/Article/CJFDTOTAL-QUDW201605005.htmXU C Y, TANG X M, NI S J, et al. Ionospheric anomalies preceding kumamoto earthquake detected by GNSS[J]. GNSS World of China, 2016, 41(5): 23-27(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-QUDW201605005.htm [10] 王姣, 姜苏洋, 狄世超, 等. GNSS系统中一种低复杂度的载噪比估计算法[J]. 哈尔滨工程大学学报, 2018, 39(6): 1087-1092. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201806018.htmWANG J, JIANG S Y, DI S C, et al. A low complexity carrier-to-noise ratio estimation algorithm in GNSS systems[J]. Journal of Harbin Engineering University, 2018, 39(6): 1087-1092(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201806018.htm [11] 何文涛, 徐建华, 叶甜春. GPS弱信号的自适应载噪比估计算法[J]. 电子技术应用, 2010, 36(6): 111-114. https://www.cnki.com.cn/Article/CJFDTOTAL-DZJY201006049.htmHE W T, XU J H, YE T C. Adaptive C/N estimation method of GPS weak signal[J]. Application of Electronic Technology, 2010, 36(6): 111-114(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DZJY201006049.htm [12] ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109%2FTAC.2009.2019800 [13] 周东华, 席裕庚, 张钟俊. 非线性系统带次优渐消因子的扩展卡尔曼滤波[J]. 控制与决策, 1990, 5(5): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC199005000.htmZHOU D H, XI Y G, ZHANG Z J. Extended Kalman filter with suboptimal fading factors for nonlinear systems[J]. Control and Decision, 1990, 5(5): 1-6(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC199005000.htm [14] 鲍水达, 张安, 高飞. 一种新的多渐消因子容积卡尔曼滤波[J]. 计算机测量与控制, 2019, 27(2): 241-245. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201902053.htmBAO S D, ZHANG A, GAO F. A new multi-decay factor volume Kalman filter[J]. Computer Measurement and Control, 2019, 27(2): 241-245(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201902053.htm [15] 朱珍珍. 卫星导航矢量跟踪关键技术研究[D]. 长沙: 国防科学技术大学, 2011: 84-88.ZHU Z Z. Research on key techniques of vector tracking for satellite navigation[D]. Changsha: National University of Defense Technology, 2011: 84-88(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1001
- HTML全文浏览量: 101
- PDF下载量: 119
- 被引次数: 0
