



Improved conflict detection model of low-altitude flight based on support vector machine
-
摘要:
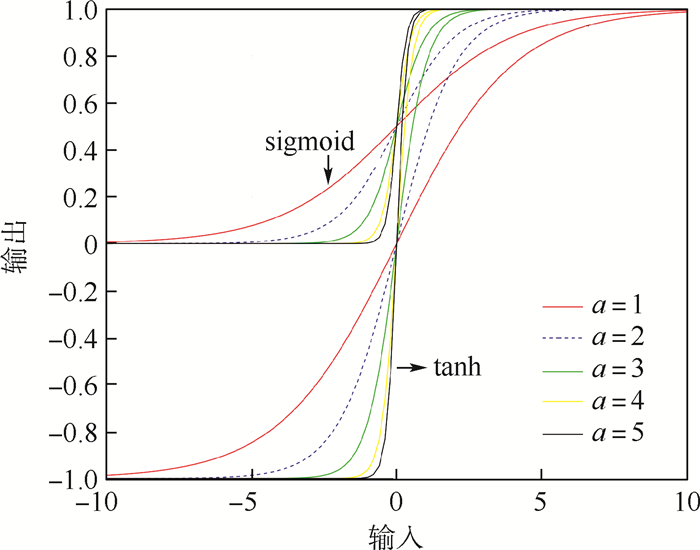
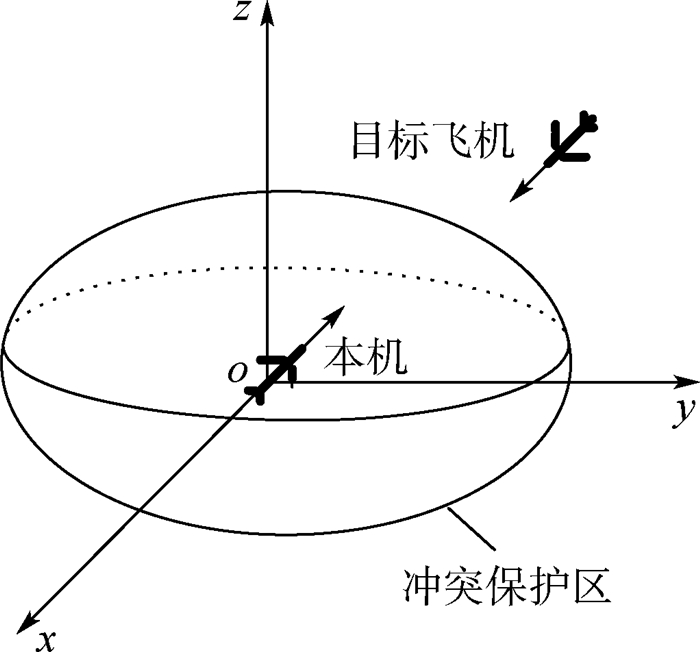
为保障通航飞行器在低空空域的飞行安全,提出了一种基于支持向量机(SVM)的飞行冲突探测改进模型。首先,建立适应于飞行器的保护区。然后,利用改进型ID3决策树算法将搜索空间降低到局部的方法筛选具有潜在飞行冲突的飞行器,并利用随机森林(RF)选择合适训练集。最后,利用tanh函数优化容易饱和的sigmoid函数对SVM分类结果的概率映射。通过仿真验证和对比分析,结果表明:利用基于密度聚类的DBSACN算法去除异常点,将剔除产生误报和虚报的数据作为训练集优化SVM分类器,改进的飞行冲突探测模型的误报率和虚报率分别降低了0.6%和1.9%,算法执行效率得到提高,而且具有较好的抗干扰能力与稳定性。
-
关键词:
- 通航飞行器 /
- 低空空域 /
- 冲突探测 /
- 支持向量机(SVM) /
- 决策树
Abstract:In order to ensure the flight safety of general aviation aircraft in low-altitude airspace, an improved model of flight conflict detection based on support vector machine (SVM) is proposed. First, according to the physical form and flight status of the aircraft, a protection zone suitable for the general aircraft is established. Then, the improved ID3 decision tree algorithm is used to reduce the search space to a local method to select aircraft with potential flight conflicts, and choose the appropriate training set by random forest (RF) method. Finally, the tanh function is used to optimize the probability mapping of the easily saturated sigmoid function to the SVM classification results. Through simulation verification and contrastive analysis, the results show that the DBSACN algorithm based on density clustering is used to remove outliers, and the data generated by false alarms and missing alarms are removed as the training set to optimize the SVM classifier. Therefore, using improved flight conflict detection model, the false alarms and missing alarms are reduced by 0.6% and 1.6% respectively, and the execution efficiency of the algorithm is improved. The model has better anti-interference ability and stability.
-

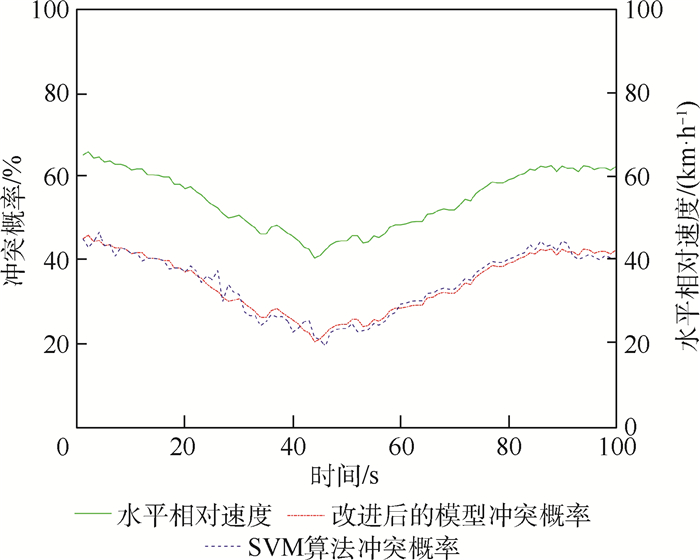
图 3 水平冲突概率变化值曲线与映射函数曲线
Figure 3. Horizontal conflict probability curve and mapping function curve
表 1 锐翔RX1E通航飞行器参数
Table 1. Parameters of RX1E general aircraft
参数 数值 机长/m 6.61 翼展/m 14.5 最大速度/(km·h-1) 120 巡航速度/(km·h-1) 150 飞行时间/min ≤100  下载: 导出CSV
下载: 导出CSV
表 2 三种探测方法的准确率比较
Table 2. Comparison of accuracy among three detection methods
参数 SVM算法 几何模型 改进后的模型 误报率/% 2.5 2.4 1.9 虚报率/% 2.9 1.5 1.0 时间/s 2.96 3.24 2.75
下载: 导出CSV
-
[1] 黄俊, 杨凤田. 新能源电动飞机发展与挑战[J]. 航空学报, 2016, 37(1): 57-68.HUANG J, YANG F T. Development and challenges of electric aircraft with new energies[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 57-68(in Chinese). [2] 全权, 李刚, 柏艺琴, 等. 低空无人机交通管理概览与建议[J]. 航空学报, 2020, 41(1): 323238.QUAN Q, LI G, BAI Y Q, et al. Low altitude UAV traffic UAV traffic management: An introductory overview and proposal[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 323238(in Chinese). [3] GARIEL M, HANSMAN R, FRAZZOLI E. Impact of GPS and ADS-B reported accuracy on conflict detection performance in dense traffic: AIAA-2011-6893[R]. Reston: AIAA, 2011. [4] SHI L, WU R B. Multi-route mid-term conflict detection algorithm based on discretization of predicted position space[J]. Signal Processing, 2012, 28(11): 1521-1528. http://en.cnki.com.cn/Article_en/CJFDTOTAL-XXCN201211004.htm [5] 沈笑云, 周波, 曹博, 等. 基于冲突概率的低空自由飞行冲突检测算法[J]. 电光与控制, 2014, 21(6): 43-47. doi: 10.3969/j.issn.1671-637X.2014.06.009SHEN X Y, ZHOU B, CAO B, et al. A free flight conflict detection algorithm of low altitude airspace based on conflict probability[J]. Electronics Optics & Control, 2014, 21(6): 43-47(in Chinese). doi: 10.3969/j.issn.1671-637X.2014.06.009 [6] 王泽坤, 吴明功, 温祥西, 等. 基于速度障碍法的飞行冲突解脱与恢复策略[J]. 北京航空航天大学学报, 2019, 45(7): 1294-1302. doi: 10.13700/j.bh.1001-5965.2018.0650WANG Z K, WU M G, WEN X X, et al. Flight collision resolution and recovery strategy based on velocity obstacle method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1294-1302(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0650 [7] GOSS J, RAJVANSHI R, SUBBARAO K. Aircraft conflict detection and resolution using mixed geometric and collision cone approaches[C]//AIAA Guidance, Navigation, and Control Conference and Exhibition. Reston: AIAA, 2004: 20-48. [8] VAN DAALEN C E, JONES T. Fast conflict detection using probability flow[J]. Automatica, 2009, 45(8): 1903-1909. doi: 10.1016/j.automatica.2009.04.010 [9] 黄洋, 汤俊, 老松杨. 基于复杂网络的无人机飞行冲突解脱算法[J]. 航空学报, 2018, 39(12): 262-274.HUANG Y, TANG J, LAO S Y. UAV flight conflict resolution algorithm based on complex network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 262-274(in Chinese). [10] ZHANG X J, GUANG X M, ZHU Y B, et al. Strategic flight approach based on multi-objective evolution algorithm with dynamic migration interval[J]. Chinese Journal of Aeronautics, 2015, 28(2): 556-563. doi: 10.1016/j.cja.2015.01.012 [11] 王尔申, 宋远上, 徐嵩, 等. 基于"北斗"的低空空域通航飞机导航监视技术研究[J]. 南京航空航天大学学报, 2019, 51(5): 586-591.WANG E S, SONG Y S, XU S, et al. Navigation and surveillance technology based on "BeiDou" for general aviation aircraft in low altitude airspace[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2019, 51(5): 586-591(in Chinese). [12] LIN C E. Collision avoidance solution for low-altitude flights[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Aerospace Engineering, 2011, 225(7): 779-790. doi: 10.1177/0954410011399211 [13] 韩冬, 张学军, 聂尊礼, 等. 一种基于SVM的低空飞行冲突探测算法[J]. 北京航空航天大学学报, 2018, 44(3): 576-582. doi: 10.13700/j.bh.1001-5965.2017.0159HAN D, ZHANG X J, NIE Z L, et al. A conflict detection algorithm for low-altitude flights based on SVM[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 576-582(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0159 [14] 宋英伟. 基于意图信息的塔台仿真计算研究[D]. 天津: 中国民航大学, 2009.SONG Y W. The research of tower simulation compulation based on intent information[D]. Tianjin: Civial Avitation University of China, 2009(in Chinese). [15] 中国民用航空局. 民用航空空中交通管理规则: CCAR-93TM-R5[S]. 北京: 中国民用航空局, 2017.Civil Aviation Administration of China. Rules for air traffic management of civil aircraft: CCAR-93TM-R5[S]. Beijing: Civil Aviation Administration of China, 2017(in Chinese). [16] 吴明功, 蒋旭瑞, 温祥西, 等. 基于支持向量机的概率型飞行冲突探测算法[J]. 飞行力学, 2019, 37(2): 56-60.WU M G, JIANG X R, WEN X X, et al. A probabilistic flight conflict detection algorithm based on SVM[J]. Flight Dynamics, 2019, 37(2): 56-60(in Chinese). -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 658
- HTML全文浏览量: 67
- PDF下载量: 79
- 被引次数: 0
