



-
摘要:
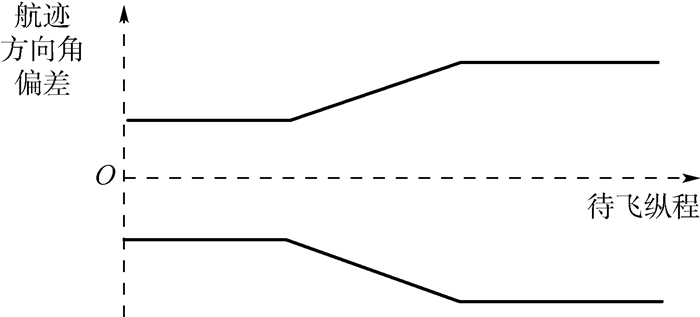
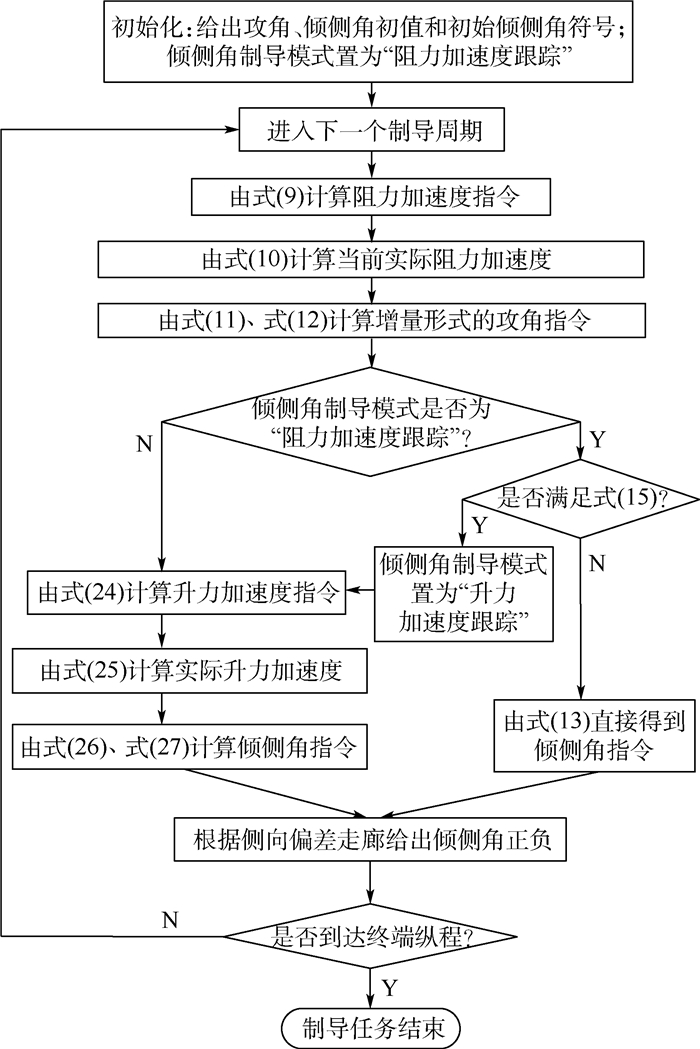
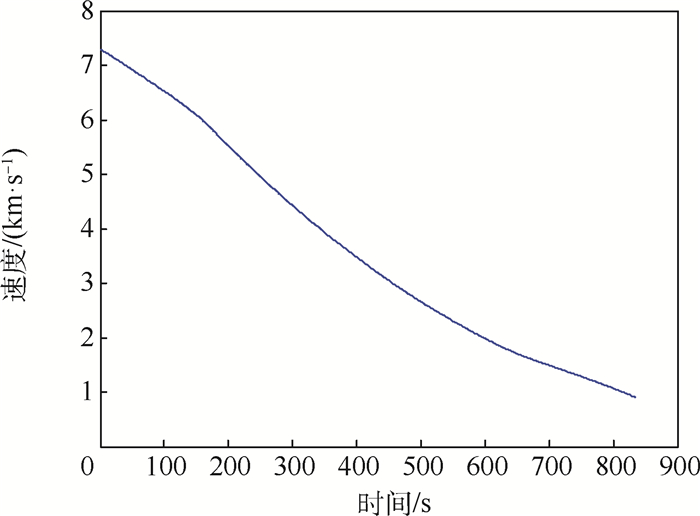
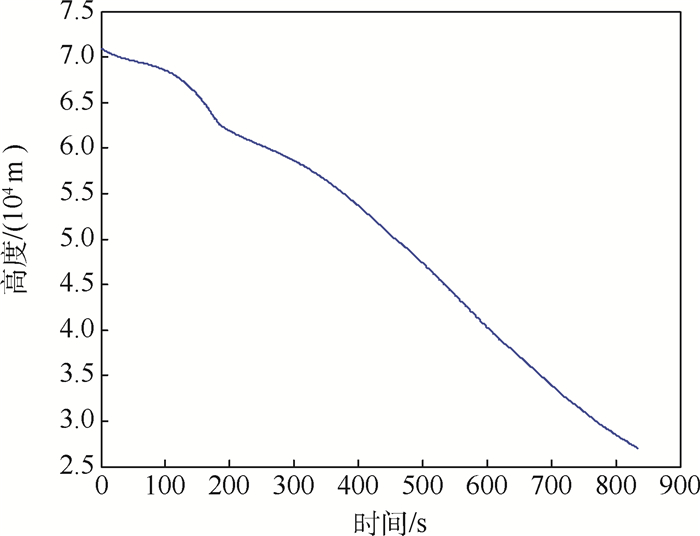
针对升力式飞行器的滑翔段制导问题,提出一种阻力和升力加速度指令在线快速解析与跟踪制导方法。通过一维质点运动学解析并加权直接得到阻力加速度指令。引入虚拟目标和伪视线角的概念,将比例导引应用于滑翔段得到升力加速度指令。利用阻力加速度和攻角的单调性关系, 通过改变攻角跟踪阻力加速度指令。倾侧角用于辅助跟踪阻力加速度指令,满足给定条件后切换至跟踪升力加速度指令。航迹方向角的控制通过倾侧角按反转走廊边界改变正负号实现。动压、热流、过载等约束可通过相关敏感参数的设计得到满足。所提方法不依赖参考轨迹和攻角剖面,计算量小,可实现对终端速度和终端高度的高精度控制。
Abstract:For the gliding flight phase guidance problem of lifting vehicle, a drag and lift acceleration commands rapid calculation and tracking guidance method is proposed. Drag acceleration command is calculated directly by one-dimensional particle kinematics and weighting. By introducing the "virtual target" and "pseudo line of sight angle" concepts, proportional navigation is used in gliding flight phase to give the lift acceleration command. Using the monotonicity of the drag acceleration and the attack angle, the attack angle is used to track drag acceleration command. The bank angle is used to track drag acceleration command in a supplementary way in the early stage. After a given criterion is satisfied, the bank angle switches to track lift acceleration command. The azimuth angle control is realized by changing the sign of the bank angle according the reverse corridor border. The dynamic pressure, heat flow, and overload constraints can be satisfied by specific sensitive parameters design. The proposed method does not need reference trajectory or attack angle profile, and the amount of calculation is small. It can control the terminal velocity and height with high accuracy.
-
Key words:
- drag acceleration /
- lift acceleration /
- calculation /
- tracking /
- guidance
-

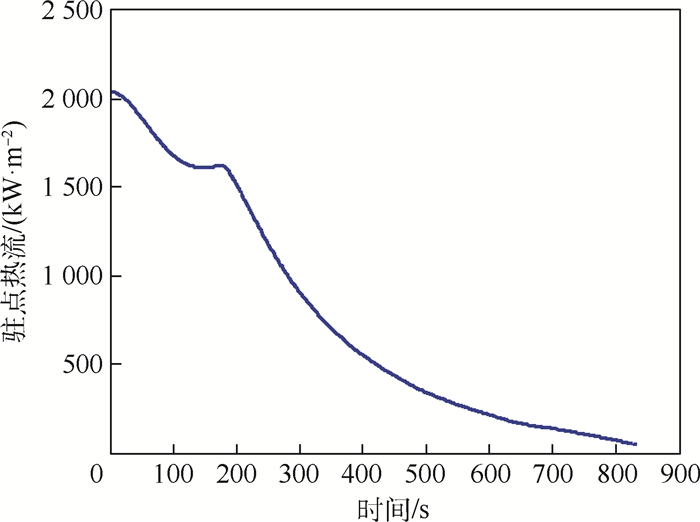
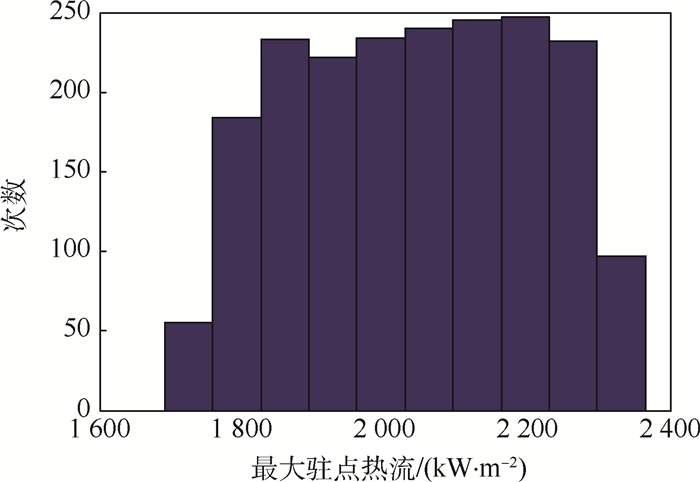
图 4 σmax1取不同值时的最大驻点热流
Figure 4. Maximum stagnation heat flux for different values of σmax1

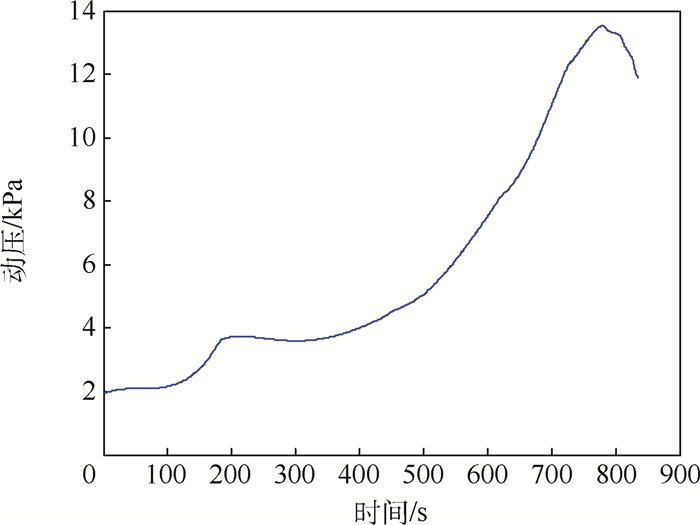
图 5 阻力加速度加权系数最大值取不同值时的动压
Figure 5. Dynamic pressure for different drag acceleration weighting coefficient maximum values

图 6 期望终端弹道倾角取不同值时的动压
Figure 6. Dynamic pressure for different expected terminal trajectory inclination angles

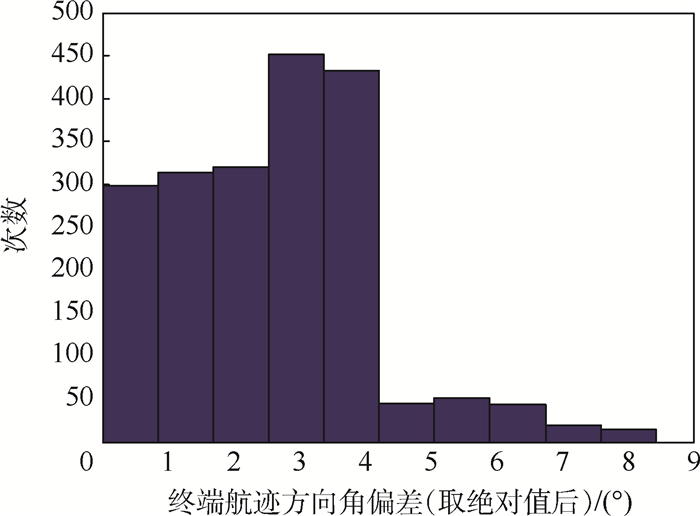
图 23 终端航迹方向角偏差(绝对值)散布图
Figure 23. Scatter of terminal azimuth deviation (absolute value)

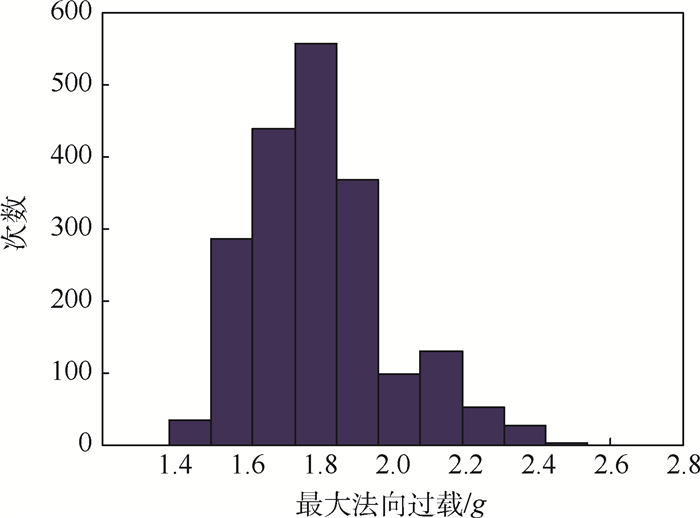
图 26 最大法向过载(本体坐标系)散布图
Figure 26. Scatter of maximum normal overload (body coordinate system)
表 1 任务初始和终端参数
Table 1. Initial and terminal parameters of task
参数 初始值 终端期望值 h/km 71 27 λ/(°) 0 ϕ/(°) 0 v/(m·s-1) 7 300 900 χt/(°) 90 θ/(°) -0.5 -2.0  下载: 导出CSV
下载: 导出CSV
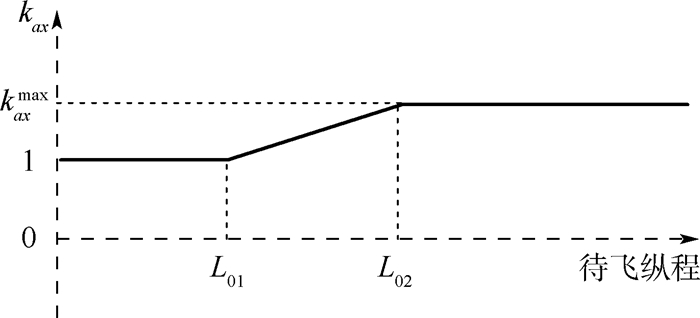
表 2 阻力加速度加权系数剖面设计
Table 2. Design of drag acceleration weighting coefficient profile
参数 情况1 情况2 情况3 L01/km 180 180 180 L02/km 300 300 300 kaxmax 1.0 1.2 1.36
下载: 导出CSV
表 3 蒙特卡罗仿真偏差项
Table 3. Deviation term of Monte Carlo simulation
参数 h/km λ/(°) ϕ/(°) v/(m·s-1) θ/(°) 偏差值 ±1 ±0.5 ±0.5 ±100 ±0.05 参数 χt/(°) m cl cd ρ 偏差值 ±0.5 ±3% ±10% ±10% ±10%
下载: 导出CSV
表 4 高空风剖面
Table 4. Upper wind profile
大地高度/km 东西向风/(m·s-1) 南北向风/(m·s-1) 最大值 最小值 最大值 最小值 73 60 -30 30 -30 26 30 -30 10 -10
下载: 导出CSV
-
[1] LU P. Predictor-corrector entry guidance for low-lifting vehicles[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4): 1067-1075. doi: 10.2514/1.32055 [2] XUE S B, LU P. Constrained predictor-corrector entry guidance[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 7-8. [3] SHEN Z J, LU P. On-boardentry trajectory planning for sub-orbital flight[J]. Acta Astronautica, 2005, 56(6): 573-591. doi: 10.1016/j.actaastro.2004.10.005 [4] SHEN Z J, LU P. Dynamic lateral entry guidance logic[J]. Journal of Guidance, Control, and Dynamics. 2004, 27(6): 11-12. [5] LU P. Entry trajectory optimization with analytical feedback bank angle law[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Reson: AIAA, 2008: 11-18. [6] LU P. Entry guidance: A unified method[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 713-728. doi: 10.2514/1.62605 [7] LU P, SUSAN J S, GAVIN F M, et al. Verification of a fully numerical entry guidance algorithm[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(2): 230-247. doi: 10.2514/1.G000327 [8] LU P, CHRISTOPHER J C, MICHAEL A T, et al. Optimal aerocapture guidance[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(4): 553-565. doi: 10.2514/1.G000713 [9] 赵頔, 沈作军. 基于在线迭代的自适应再入制导[J]. 北京航空航天大学学报, 2016, 42(7): 1526-1535. doi: 10.13700/j.bh.1001-5965.2015.0463ZHAO D, SHEN Z J. Adaptive reentry guidance based on on-board trajectory iterations[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1526-1535(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0463 [10] 黄汉斌, 梁禄扬, 杨业. 基于阻力加速度倒数剖面的再入轨迹规划与制导方法[J]. 航空学报, 2018, 39(12): 322558. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201812030.htmHUANG H B, LIANG L Y, YANG Y. Reentry trajectory planning and guidance method based on inverse drag acceleration[J]. Acta Aeranautica et Astronautica Sinica, 2018, 39(12): 322558(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201812030.htm [11] 王涛, 张洪波, 朱如意, 等. 考虑阻力加速度的再入预测-校正制导算法[J]. 宇航学报, 2017, 38(2): 143-151. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201702005.htmWANG T, ZHANG H B, ZHU R Y, et al. Predictor-corrector reentry guidance based on drag acceleration[J]. Journal of astronautics, 2017, 38(2): 143-151(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201702005.htm [12] 魏毅寅, 李瑜, 段广仁. 远程滑翔导弹滑翔段制导算法研究[J], 宇航学报, 2009, 30(2): 481-485. doi: 10.3873/j.issn.1000-1328.2009.02.014WEI Y Y, LI Y, DUAN G R. Research on guidance method of glide phase for long range glide missile[J]. Journal of Astronautics, 2009, 30(2): 481-485(in Chinese). doi: 10.3873/j.issn.1000-1328.2009.02.014 [13] 蔺君, 黄盘兴, 何英姿. 高升阻比再入飞行器阻力加速度设计及跟踪制导[J]. 空间控制技术与应用, 2020, 46(1): 17-23. https://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ202001003.htmLIN J, HUANG P X, HE Y Z. Drag acceleration design and tracking guidance for high L/D reentry vehicle[J]. Aerospace Control and Application, 2020, 46(1): 17-23(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ202001003.htm [14] 李惠峰. 高超声速飞行器制导与控制技术[M]. 北京: 中国宇航出版社, 2012: 333-363.LI H F. Guide and control technology for hypersonic vehicle[M]. Beijing: China Aerospace Press, 2012: 333-363(in Chinese). [15] 阎晓东, 王智. 高超声速无动力滑翔三维轨迹规划方法[J]. 北京理工大学学报, 2013, 33(7): 669-674. doi: 10.3969/j.issn.1001-0645.2013.07.003YAN X D, WANG Z. Three-dimensional trajectory planning method for hupersonic glide vehicles[J]. Transactions of Beijing Institute of Technology, 2013, 33(7): 669-674(in Chinese). doi: 10.3969/j.issn.1001-0645.2013.07.003 [16] 郭继峰, 傅瑜, 崔乃刚. 三维自主再入制导方法[J]. 控制与决策, 2013, 28(8): 689-694. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305009.htmGUO J F, FU Y, CUI N G. Three dimensional autonomous entry guidance method[J]. Control and Decision, 2013, 28(8): 689-694(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305009.htm [17] 徐明亮, 陈克俊, 刘鲁华, 等, 高超声速飞行器准平衡滑翔自适应制导方法[J]. 中国科学: 技术科学, 2012, 42(4): 378-387. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201204004.htmXU M L, CHEN K J, LIU L H, et al. Quasi-equilibrium glide adaptive guidance for hypersonic vehicles[J]. Sci China: Tech Sci, 2012, 42(4): 378-387(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201204004.htm [18] 赵明, 李洪梁, 张维文, 等. 高超声速飞行器的解析式滑翔制导[J]. 战术导弹技术, 2018, 18(4): 78-83. https://www.cnki.com.cn/Article/CJFDTOTAL-ZSDD201804013.htmZHAO M, LI H L, ZHANG W W, et al. Analytical guidance for hypersonic glide vehicles[J]. Tactical Missile Technology, 2018, 18(4): 78-83(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZSDD201804013.htm [19] YU W B, CHEN W C, JIANG Z G, et al. Omnidiretional autonomous entry guidance based on 3-D analytical flight formulae[J]. ISA Transactions, 2016, 65: 487-503. doi: 10.1016/j.isatra.2016.09.002 [20] 胡锦川, 陈万春. 平稳再入弹道设计方法[J]. 北京航空航天大学学报, 2015, 41(8): 1464-1475. doi: 10.13700/j.bh.1001-5965.2014.0023HU J C, CHEN W C. Steady reentry trajectory planning method for reentry vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(8): 1464-1475(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0023 [21] YU W B, CHEN W C. Guidance law with circular no fly zone constraint[J]. Nonlinear Dynamics, 2014, 78(3): 1953-1971. doi: 10.1007/s11071-014-1571-2 [22] YANG Y, LIANG L Y, WU H, et al. Onboard and analytic prediction algorithm of the range-to-go for the lifting vehicle[C]//21st AIAA International Space Planesand Hypersonics Technologies Conference. Reston: AIAA, 2017. -

 下载:
下载:












 点击查看大图
点击查看大图
计量
- 文章访问数: 470
- HTML全文浏览量: 94
- PDF下载量: 88
- 被引次数: 0
