



Constraint violation suppression for dynamics modeling of lower limb rehabilitation robot
-
摘要:
U-K理论为获得约束多体系统的解析动力学方程提供了新的理念,但由于数值近似和截断误差等因素的影响,动力学方程在位置和速度层面上存在约束违约。Baumgarte约束违约稳定法(BSM)通过约束修正得到稳定的动力学方程。然而,Baumgarte参数的选择通常涉及一个试错过程,可能会出现失效的仿真结果。为此,利用经典的四阶Runge-Kutta法研究了Baumgarte参数选取问题,创建了基于BSM修正后的U-K理论的机器人系统解析动力学方程。以下肢康复机器人为研究对象仿真分析,结果表明:利用所提方法可以有效抑制约束违约,关节角度误差控制在-5×10-3(°)~5×10-3(°)范围内;关节角速度误差控制在-2×10-4~2×10-4 rad/s范围内;机器人末端执行器运行轨迹能够很好地贴近系统预定的目标。
-
关键词:
- U-K理论 /
- 约束违约 /
- Baumgarte约束违约稳定法(BSM) /
- Baumgarte参数 /
- 下肢康复机器人
Abstract:The U-K theory provides a new concept for obtaining the explicit dynamic equation of constraint multibody system. However, one consequence of the numerical approximation and truncation error is the constraint violation of the dynamic equation at the position and velocity level. Baumgarte's constraint violation stability methods (BSM) provide a stable dynamic equation by constraint modification. Nevertheless, the selection of Baumgarte parameters usually involve a trial-and-error process, which may result in the failure of simulation results. Consequently, the Baumgarte parameters selection problem is studied by using the classical fourth-order Runge-Kutta method, and the explicit dynamic equation of robot system based on the modified U-K theory by BSM is established. Furthermore, the lower limb rehabilitation robot is taken as the research object for simulation analysis. The results show that the constraint violation can be effectively suppressed. The joint angle errors are controlled within the range of -5×10-3(°)-5×10-3(°), the joint angular velocity errors are controlled within the range of -2×10-4 rad/s-2×10-4 rad/s, and the operation trajectory of the robot end-effector can be well close to the predetermined target of the system.
-

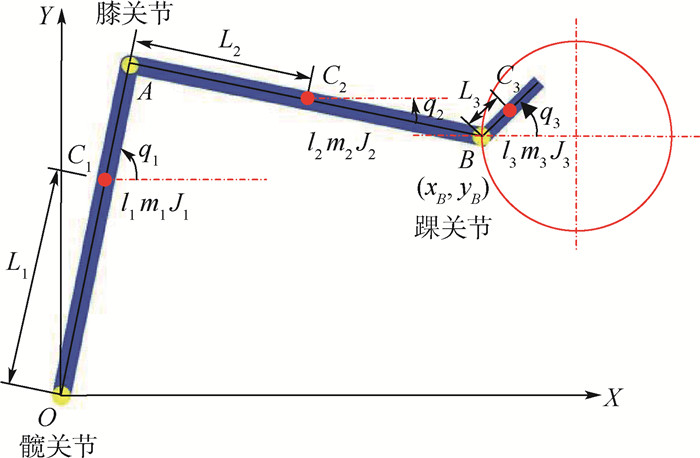
图 2 下肢康复机器人系统示意图
Figure 2. Schematic diagram of lower limb rehabilitation robot system

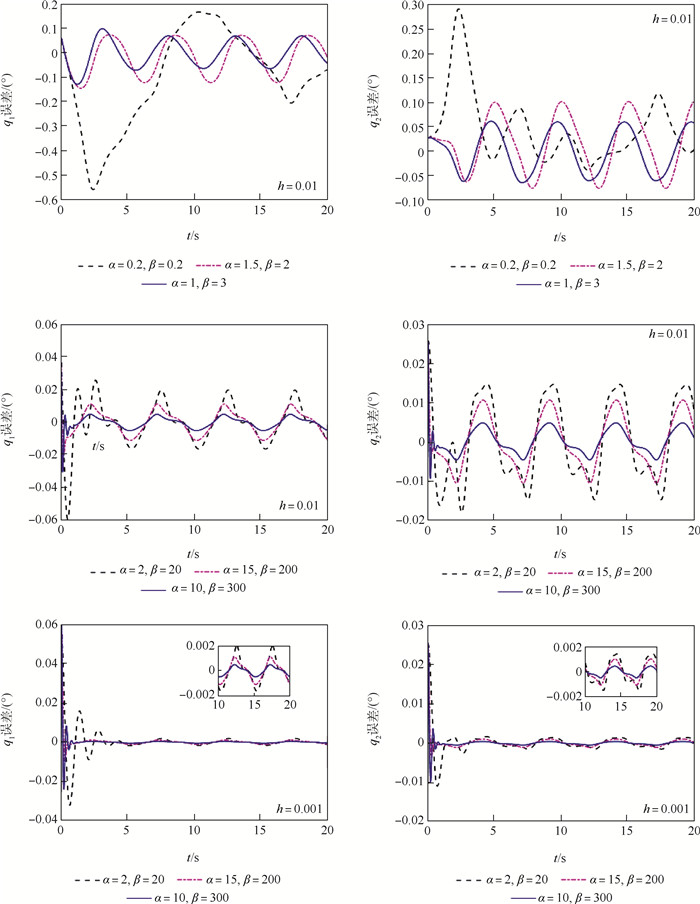
图 3 修正后的关节角度误差对比(不同步长和Baumgarte参数)
Figure 3. Comparison of corrected joint angle errors (different step lengths and Baumgarte parameters)

图 4 修正后的关节角速度误差对比(不同步长和Baumgarte参数)
Figure 4. Comparison of corrected joint angular velocity errors (different step lengths and Baumgarte parameters)

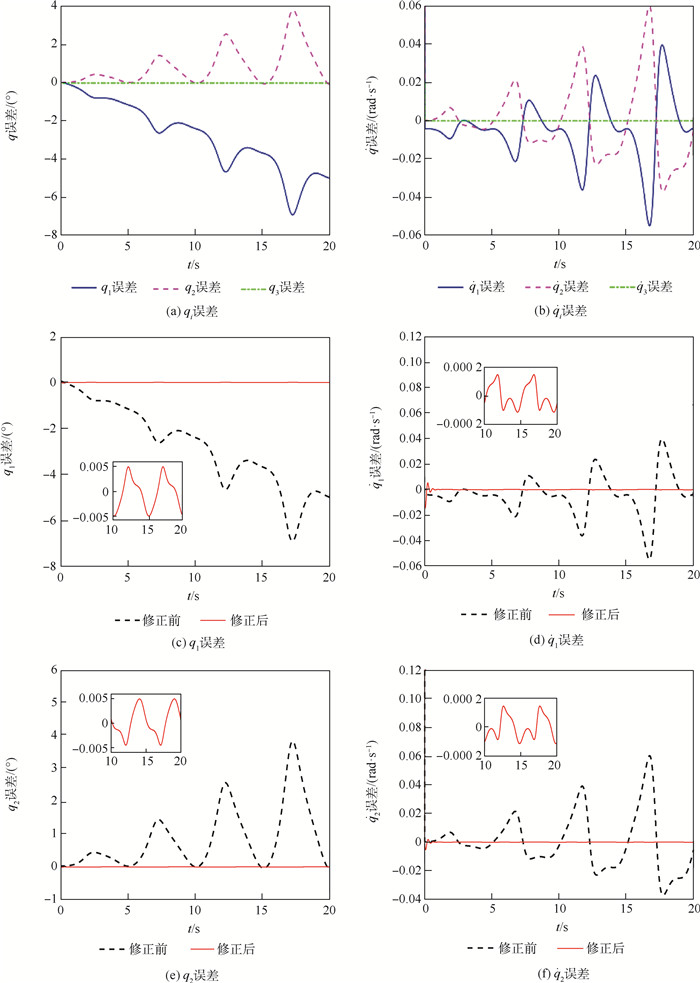
图 5 修正前后数值解与理论解的对比(h=0.01, α=10, β=300)
Figure 5. Comparison of numerical solutions and theoretical solutions before and after correction (h=0.01, α=10, β=300)

图 6 修正前后误差的对比(h=0.01, α=10, β=300)
Figure 6. Comparison of errors before and after correction (h=0.01, α=10, β=300)
表 1 不同Baumgarte参数取值
Table 1. Different Baumgarte parameter values
步长 Baumgarte参数 h=0.01 


h=0.01 


h=0.001 


 下载: 导出CSV
下载: 导出CSV
-
[1] UDWADIA F E, KALABA R E. Analytical dynamics: A new approach[M]. Cambridge: Cambridge University Press, 2007. [2] LIU J, LIU R. Dynamic modeling of dual-arm cooperating manipulators based on Udwadia-Kalaba equation[J]. Advances in Mechanical Engineering, 2016, 8(7): 1-10. [3] HUANG K, SHAO K, ZHEN S C, et al. A novel approach for modeling and tracking control of a passive-wheel snake robot[J]. Advances in Mechanical Engineering, 2017, 9(3): 1-15. [4] LYU G Z, LIU R. Determination of stability correction parameters for dynamic equations of constrained multibody systems[J]. Mathematical Problems in Engineering, 2018, 2018: 1-10. [5] SUN H, ZHAO H, HUANG K, et al. A new approach for vehicle lateral velocity and yaw rate control with uncertainty[J]. Asian Journal of Control, 2018, 20(1): 216-227. doi: 10.1002/asjc.1531 [6] ZHAO X M, CHEN Y H, ZHAO H, et al. Udwadia-Kalaba equation for constrained mechanical systems: Formulation and applications[J]. Chinese Journal of Mechanical Engineering, 2018, 31(6): 1-14. [7] PAPPALARDO C M, GUIDA D. On the dynamics and control of underactuated nonholonomic mechanical systems and applications to mobile robots[J]. Archive of Applied Mechanics, 2019, 89(4): 669-698. doi: 10.1007/s00419-018-1491-6 [8] BLAJER W. Elimination of constraint violation and accuracy aspects in numerical simulation of multibody systems[J]. Multibody System Dynamics, 2002, 7(3): 265-284. doi: 10.1023/A:1015285428885 [9] BRAUN D J, GOLDFARB M. Eliminating constraint drift in the numerical simulation of constrained dynamical systems[J]. Computer Methods in Applied Mechanics and Engineering, 2009, 198(37-40): 3151-3160. doi: 10.1016/j.cma.2009.05.013 [10] BAUMGARTE J. Stabilization of constraints and integrals of motion in dynamical systems[J]. Computer Methods in Applied Mechanics and Engineering, 1972, 1(1): 1-16. doi: 10.1016/0045-7825(72)90018-7 [11] LIN S T, CHEN M W. A PID type constraint stabilization method for numerical integration of multibody systems[J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(4): 044501. doi: 10.1115/1.4002688 [12] ZHANG X C, ZHANG X M, CHEN Z. Dynamic analysis of a 3-RRR parallel mechanism with multiple clearance joints[J]. Mechanism and Machine Theory, 2014, 78(78): 105-115. [13] MARQUES F, SOUTO A P, FLORES P. On the constraints violation in forward dynamics of multibody systems[J]. Multibody System Dynamics, 2016, 39: 385-419. [14] LIANG D, SONG Y M, SUN T. Nonlinear dynamic modeling and performance analysis of a redundantly actuated parallel manipulator with multiple actuation modes based on FMD theory[J]. Nonlinear Dynamics, 2017, 89(1): 391-428. doi: 10.1007/s11071-017-3461-x [15] GUO X, ZHANG D G, LI L, et al. Application of the two-loop procedure in multibody dynamics with contact and constraint[J]. Journal of Sound and Vibration, 2018, 427: 15-27. doi: 10.1016/j.jsv.2018.04.020 [16] FLORES P, MACHADO M, SEABRA E, et al. A parametric study on the Baumgarte stabilization method for forward dynamics of constrained multibody systems[J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(1): 1-9. [17] 黎健玲. 数值分析与实验[M]. 北京: 科学出版社, 2012: 194-196.LI J L. Numerical analysis and experiments[M]. Beijing: Science Press, 2012: 194-196(in Chinese). [18] LIN S T, HUANG J N. Stabilization of Baumgarte's method using the Runge-Kutta approach[J]. Journal of Mechanical Design, 2002, 124(4): 633-641. doi: 10.1115/1.1519277 [19] OGATA K. Discrete-time control systems[M]. Englewood Cliffs: Prentice-Hall, 1994. [20] SHENOY P, MILLER K J, CRAWFORD B, et al. Online electromyographic control of a robotic prosthesis[J]. IEEE Transactions on Biomedical Engineering, 2008, 55(3): 1128-1135. doi: 10.1109/TBME.2007.909536 -


 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 385
- HTML全文浏览量: 76
- PDF下载量: 66
- 被引次数: 0
