



-
摘要:
确定采样型滤波算法中的容积卡尔曼滤波(CKF)算法滤波性能优良,但是却难以克服目标模型不确定性或者目标状态突变带来的影响。构造强跟踪CKF能有效改善算法的自适应性,但是在求解渐消因子时大大增加了计算量。为此,提出一种低复杂度自适应CKF算法,通过设立基于新息的自适应修正判决准则和修正方式,直接对状态预测值进行修正,使滤波算法能及时跟上目标真实状态,以提高滤波精度。使用浮点操作数计算并分析了CKF算法、强跟踪CKF算法及所提算法的复杂度,同时将3种算法应用在建模不准确的目标跟踪中,并进行仿真验证。仿真结果表明:在目标建模不匹配的情况下,低复杂度自适应CKF算法和强跟踪CKF算法都能保持较好的滤波精度和数值稳定性,同时所提算法在算法复杂度上有明显改善。
-
关键词:
- 容积卡尔曼滤波(CKF) /
- 目标模型不确定性 /
- 强跟踪滤波器 /
- 自适应修正 /
- 算法复杂度
Abstract:Cubature Kalman filter (CKF) with good filtering performance is one of the deterministic sampling filtering algorithms, but it is not able to overcome the impact caused by the target model uncertainty or the mutation of the target state. Constructing strong tracking CKF can effectively improve the adaptability of the algorithm, but the computation is greatly increased when solving the fading factor. A low-complexity adaptive CKF algorithm is proposed to solve the above problems. By establishing adaptive judgment criteria and amending method based on innovation sequence, the predicted state value is directly amended, so that the filtering algorithm can keep up with the real state of the target in time, and thus improve the filtering accuracy. The complexity of CKF, strong tracking CKF and the proposed algorithm are calculated and analyzed by using floating point operations. At the same time, the above three algorithms are applied to target tracking with inaccurate modeling, and are verified through simulation. The simulation results show that both the proposed algorithm and the strong tracking CKF algorithm can maintain better filtering accuracy and numerical stability in the case of mismatched target modeling, and the proposed algorithm has obvious improvement in algorithm complexity.
-
表 1 三种算法复杂度计算结果
Table 1. Computational results of complexity of three algorithms
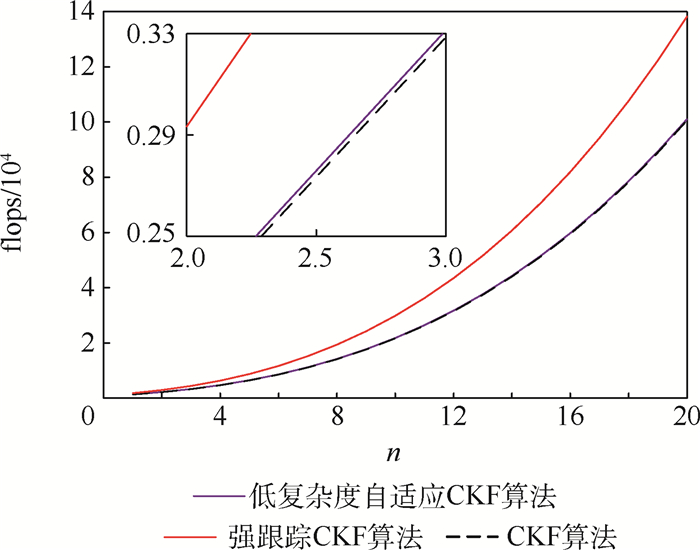
算法 算法复杂度/flops CKF 20n3/3+10n2+10n2l+8nl2+2nl+l3+3l2+l 强跟踪CKF 26n3/3+10n2+16n2l+10nl2-nl+l3+8l2+3l 低复杂度自适应CKF 20n3/3+11n2+10n2l+8nl2+2nl+l3+3l2+3l+n  下载: 导出CSV
下载: 导出CSV
表 2 不同算法平均均方根误差对比
Table 2. Comparison of mean RMSE among different algorithms
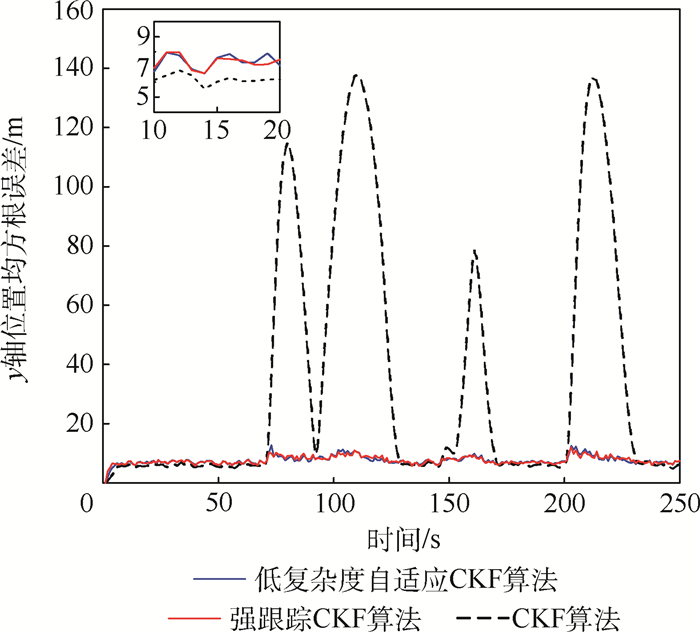
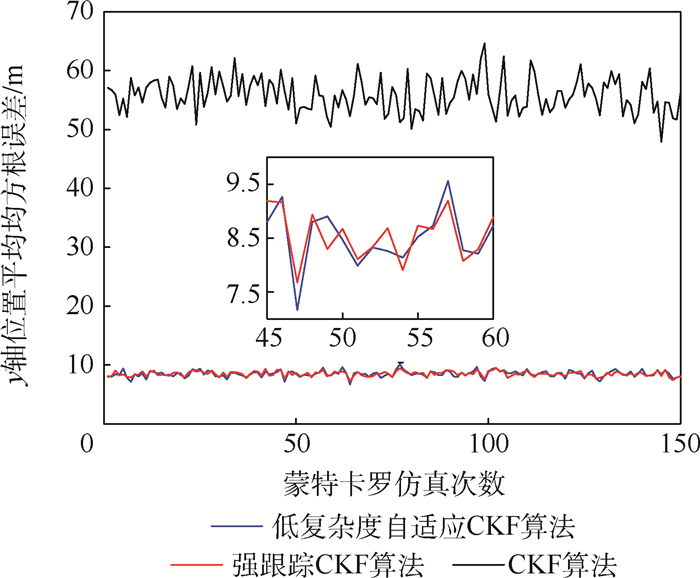
算法 平均RMSE/m x轴位置 y轴位置 CKF 35.732 5 35.062 5 强跟踪CKF 8.416 2 8.389 1 低复杂度自适应CKF 8.405 5 8.384 5
下载: 导出CSV
表 3 不同算法运行时间对比
Table 3. Comparison of running time among different algorithms
算法 平均运行时间/(10-2s) 运行时间增加百分比 CKF 2.677 6 0 强跟踪CKF 3.468 3 29.53 低复杂度自适应CKF 2.712 1 1.29
下载: 导出CSV
-
[1] 王小旭, 潘泉, 黄鹤, 等. 非线性系统确定采样型滤波算法综述[J]. 控制与决策, 2012, 27(6): 801-812. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201206000.htmWANG X X, PAN Q, HUANG H, et al. Overview of deterministic sampling filtering algorithms for nonlinear system[J]. Control and Decision, 2012, 27(6): 801-812(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201206000.htm [2] JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482. doi: 10.1109/9.847726 [3] MERWE R V, WAN E A. Sigma-point Kalman filters for integrated navigation[C]//Processing of the 60th Annual Meeting of the Institute of Navigation, 2004: 641-654. [4] ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800 [5] ARASARATNAM I, HAYKIN S. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 4977-4993. doi: 10.1109/TSP.2010.2056923 [6] JULIER S J, UHLMANN J K. A general method for approximating nonlinear transformation of probability distributions[EB/OL]. (1996-11-01)[2020-10-29]. http://www.eng.ox.ac.uk/. [7] 穆静, 蔡远利. 迭代容积卡尔曼滤波算法及其应用[J]. 系统工程与电子技术, 2011, 33(7): 1454-1457. doi: 10.3969/j.issn.1001-506X.2011.07.05MU J, CAI L Y. Iterated cubature Kalman filter and its application[J]. Systems Engineering and Electronics, 2011, 33(7): 1454-1457(in Chinese). doi: 10.3969/j.issn.1001-506X.2011.07.05 [8] ZHANG H W, XIE J W, GE J A, et al. Adaptive strong tracking square-root cubature Kalman filter for maneuvering aircraft tracking[J]. IEEE Access, 2018, 6: 10052-10061. doi: 10.1109/ACCESS.2018.2808170 [9] ZHANG H W, XIE J W, GE J A, et al. Strong tracking SCKF based on adaptive CS model for manoeuvring aircraft tracking[J]. IET Radar, Sonar & Navigation, 2018, 12(7): 742-749. [10] HAN B, HUANG H Q, LEI L, et al. An improved IMM algorithm based on STSRCKF for maneuvering target tracking[J]. IEEE Access, 2019, 7: 57795-57804. doi: 10.1109/ACCESS.2019.2912983 [11] 徐树生, 林孝工. 基于鲁棒CKF的多传感器全信息融合算法[J]. 电机与控制学报, 2013, 17(2): 90-97. doi: 10.3969/j.issn.1007-449X.2013.02.014XU S S, LIN X G. Multi-sensor all information fusion algorithm based on robust CKF[J]. Machines and Control, 2013, 17(2): 90-97(in Chinese). doi: 10.3969/j.issn.1007-449X.2013.02.014 [12] ZHOU D H, XI Y G, ZHANG Z J. A suboptimal multiple extended Kalman filters[J]. Chinese Journal of Automation, 1992, 4(2): 145-152. [13] 孙妍, 鲁涤强, 陈启军. 一种基于强跟踪的改进容积卡尔曼滤波器[J] 华中科技大学学报(自然科学版), 2013, 41(S1): 451-454. https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2013S1115.htmSUN Y, LU D Q, CHEN Q J. An improved cubature Kalman filters based on strong tracking[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2013, 41(S1): 451-454(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2013S1115.htm [14] ZHAO L Q, WANG J L, YU T, et al. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator[J]. Applied Mathematics and Computation, 2015, 256: 352-367. doi: 10.1016/j.amc.2014.12.036 [15] GE Q B, LI W B, WEN C L. SCKF-STF-CN: A universal nonlinear filter for maneuver target tracking[J]. Journal of Zhejiang University Science C, 2011, 12(8): 678-686. doi: 10.1631/jzus.C10a0353 [16] LI N, ZHU R, ZHANG Y. A strong tracking square-root CKF algorithm based on multiple fading factors for target tracking[C]//Processing of the 7th International Joint Conference on Computational Sciences and Optimization. Piscataway: IEEE Press, 2014: 16-24. [17] ZHANG A, BAO S D, BI W H, et al. Low-cost adaptive square-root cubature Kalman filter for systems with process model uncertainty[J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 945-953. doi: 10.21629/JSEE.2016.05.01 [18] ZHANG A, BAO S D, GAO F, et al. A novel strong tracking cubature Kalman filter and its application in maneuvering target tracking[J]. Chinese Journal of Aeronautics, 2019, 32(11): 2489-2502. doi: 10.1016/j.cja.2019.07.025 [19] 张浩为, 谢军伟, 葛佳昂, 等. 自适应CS模型的强跟踪平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2019, 41(6): 19-27. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201906003.htmZHANG H W, XIE J W, GE J A, et al. Strong tracking square-root cubature Kalman filter over adaptive current statistical model[J]. Systems Engineering and Electronics, 2019, 41(6): 19-27(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201906003.htm [20] 戴定成, 蔡宗平, 牛创. 基于简化平方根容积卡尔曼滤波的跟踪算法[J]. 电光与控制, 2015, 22(3): 11-14. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201503003.htmDAI D C, CAI Z P, NIU C. Target tracking algorithm based on reduced square-root cubature Kalman filter[J]. Electronics Optics & Control, 2015, 22(3): 11-14(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201503003.htm [21] 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12): 111-115. doi: 10.11918/j.issn.0367-6234.2013.12.020ZHANG Z Y, HAO Y L, WU X. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technology, 2013, 45(12): 111-115(in Chinese). doi: 10.11918/j.issn.0367-6234.2013.12.020 [22] GREWAL M S, ANDREW A P. Kalman filtering, theory and practice using Matlab[M]. 2nd ed. New York: John Wiley & Sons, 2008: 225-289. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 772
- HTML全文浏览量: 61
- PDF下载量: 151
- 被引次数: 0
