



-
摘要:
为了获取高速铁路列车在隧道这种导航卫星不可见环境下的定位信息,提出一种基于捷联惯性导航系统(SINS)和射频识别技术(RFID)的组合定位方法。通过响应时间模型来计算标签的定位精度,依据实际轨道环境增加标签对列车姿态校准的能力,同时结合惯性导航系统解算得到连续的定位数据。仿真结果表明:在30 km长的隧道利用射频识别标签位置信息进行校准,可以很大程度地减小惯性导航系统的误差积累,提高定位精度。引入姿态信息后,可以在陀螺仪性能与标签间隔的多种组合中保持隧道全线定位精度在米级,最高能够达到0.5 m。
-
关键词:
- 组合导航 /
- 隧道定位 /
- 射频识别技术(RFID) /
- 捷联惯性导航系统(SINS) /
- 动态姿态校准
Abstract:based on strapdown inertial navigation system (SINS) and radio frequency identification (RFID), an integrated positioning method is proposed for the position acquisition of high-speed trains in satellite-denied environment such as tunnels. The positioning accuracy of RFID tags is calculated by the response time model. The tags could also calibrate the attitude by adding actual railway information. Setting RFID tags on tunnel wall and at the same time combining with inertial navigation system provide continuous dynamic positioning data. Simulation results show that utilizing RFID tags in position calibration significantly decreases the error accumulation of inertial navigation system and increases positioning accuracy in 30 km tunnel. After the addition of attitude information, the positioning accuracy of the whole tunnel railway maintains at the level of meters in a variety of combinations of gyroscope performance and RFID tag interval, the best of which is 0.5 m.
-

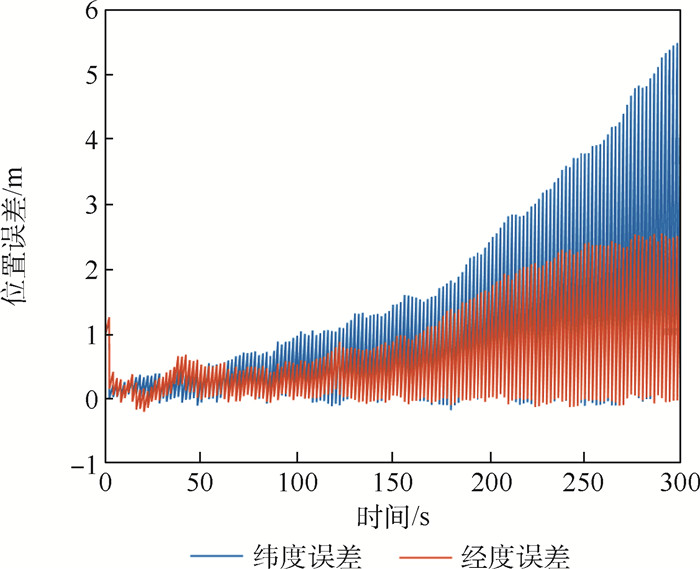
图 4 RFID位置校准SINS的定位误差
Figure 4. Positioning error of SINS calibrated by position of RFID

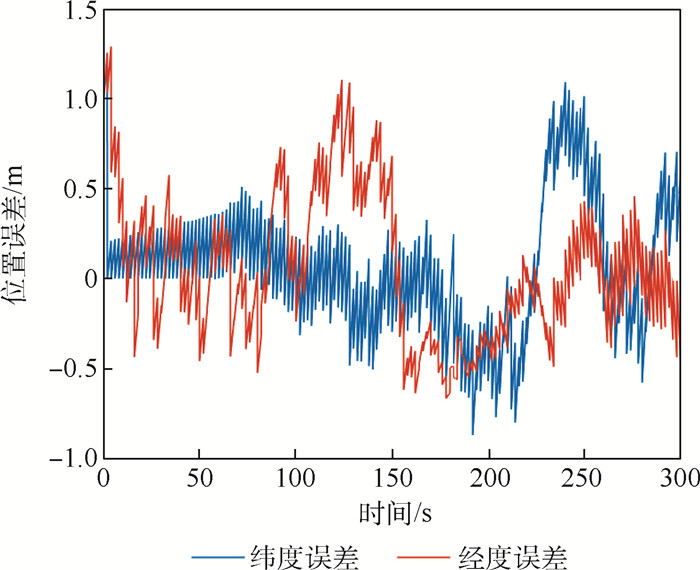
图 5 RFID姿态位置信息校准SINS的定位误差
Figure 5. Positioning error of SINS calibrated by position and attitude of RFID
表 1 RFID阅读器读取位置分布统计
Table 1. Distribution statistics of received signal position of RFID reader
响应时间分布 均值/m 标准差/m 正态分布 1.921 9 0.337 3 均匀分布 1.908 7 0.358 9  下载: 导出CSV
下载: 导出CSV
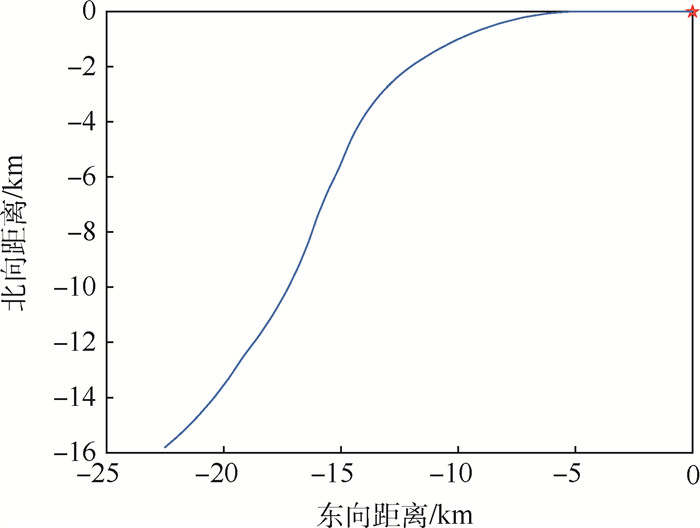
表 2 列车仿真轨迹的行进方案
Table 2. Scheme of train trajectory simulation
序号 路线方案 时间/s 重复次数 1 直行 50 1 2 左转,直行 5,5 7 3 左转,直行 45,5 1 4 右转,直行 5,5 1 5 左转,直行 5,5 2 6 右转,直行 5,5 5 7 左转,直行 5,5 1 8 右转,直行 5,5 4
下载: 导出CSV
表 3 SINS/RFID位置组合导航定位误差统计
Table 3. Navigation positioning error statistics of SINS/RFID integrated by positon
间隔/m 情况1 情况2 情况3 平均值/m 最大值/m 平均值/m 最大值/m 平均值/m 最大值/m 100 0.752 8 1.153 3 3.104 4 5.682 5 27.824 4 51.267 9 200 1.374 4 1.993 8 6.150 7 11.315 7 56.235 7 107.712 2 500 3.187 6 4.505 5 15.423 3 27.781 1 141.115 7 254.971 2 1 000 6.202 6 9.020 6 30.243 2 52.392 2 276.417 9 538.789 2 不用RFID 93.333 2 122.828 6 338.633 0 653.079 8 3 072.103 3 6 425.889 1
下载: 导出CSV
表 4 SINS/RFID位置姿态角组合导航定位误差统计
Table 4. Navigation positioning error statistics of SINS/RFID integrated by positon and attitude
间隔/m 情况1 情况2 情况3 平均值/m 最大值/m 平均值/m 最大值/m 平均值/m 最大值/m 100 0.510 4 0.743 4 0.573 8 0.851 9 0.625 2 1.002 6 200 0.845 7 1.413 4 0.968 0 1.427 1 1.183 1 1.987 6 500 1.812 3 2.936 7 2.158 1 3.580 0 3.789 5 6.411 3 1 000 3.497 4 6.041 7 4.507 6 9.521 8 11.982 4 24.171 1
下载: 导出CSV
-
[1] 上官伟, 王韦舒, 张路, 等. 北斗导航RAIM技术在列车定位的应用研究[J]. 铁道学报, 2018, 40(2): 73-81. doi: 10.3969/j.issn.1001-8360.2018.02.011SHANGGUAN W, WANG W S, ZHANG L, et al. Application of BDS-based RAIM technology in train positioning[J]. Journal of the China Railway Society, 2018, 40(2): 73-81(in Chinese). doi: 10.3969/j.issn.1001-8360.2018.02.011 [2] WANG D S, LU Y J, ZHANG L, et al. Intelligent positioning for a commercial mobile platform in seamless indoor/outdoor scenes based on multi-sensor fusion[J]. Sensors, 2019, 19(7): 1696. doi: 10.3390/s19071696 [3] 王晓薇. 基于WIFI的隧道人员定位算法的分析与研究[D]. 武汉: 武汉邮电科学研究院, 2017: 18-24.WANG X W. Analysis and research of tunnel personnel location algorithm based on WIFI[D]. Wuhan: Wuhan Research Institute of Posts and Telecommunications, 2017: 18-24(in Chinese). [4] 黄文轩. 在GPS不完备条件下RFID列车定位研究[J]. 铁路通信信号工程技术, 2018, 15(1): 25-29. https://www.cnki.com.cn/Article/CJFDTOTAL-TLTX201801010.htmHUANG W X. Research on RFID train location under incomplete GPS[J]. Railway Signalling & Communication Engineering, 2018, 15(1): 25-29(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TLTX201801010.htm [5] 陈伟. 卫星遮挡交通环境下车辆融合定位策略研究[D]. 南京: 东南大学, 2017: 81-97.CHEN W. Research on fusion positioning strategy for land vehicles in satellite signal-blocked traffic environments[D]. Nanjing: Southeast University, 2017: 81-97(in Chinese). [6] PEREIRA F L. Positioning systems for underground tunnel environments[D]. Portugal: Faculdade de Engenharia da Universidade do Porto, 2016: 79-115. [7] 方旺盛, 高银. 狭长直隧道环境中WSN的RSSI加权质心定位算法[J]. 传感技术学报, 2014, 27(2): 247-251. doi: 10.3969/j.issn.1004-1699.2014.02.019FANG W S, GAO Y. A weighted centroid localization algorithm based on RSSI for wireless sensor network in straight narrow tunnel[J]. Chinese Journal of Sensors and Actuators, 2014, 27(2): 247-251(in Chinese). doi: 10.3969/j.issn.1004-1699.2014.02.019 [8] SONG X, LI X, TANG W C, et al. A hybrid positioning strategy for vehicles in a tunnel based on RFID and in-vehicle sensors[J]. Sensors, 2014, 14(12): 23095-23118. doi: 10.3390/s141223095 [9] KO H, SHIM Y, KONG S H. Realization and demonstration of enhanced Korean high-speed train navigation system with noise filtering schemes[J]. International Journal of Control Automation and Systems, 2018, 16(9): 769-781. [10] CUI L, ZHANG Z H, GAO N, et al. Radio frequency identification and sensing techniques and their applications-A review of the state-of-the-art[J]. Sensors, 2019, 19(18): 4012. doi: 10.3390/s19184012 [11] 彭国旗. 基于RFID的车辆定位技术研究[D]. 长春: 长春理工大学, 2018: 7-18.PENG G Q. Research on vehicle positioning technology based on RFID[D]. Changchun: Changchun University of Science and Technology, 2018: 7-18(in Chinese). [12] ZHAO Y, LIU K H, MA Y T, et al. Similarity analysis based indoor localization algorithm with backscatter information of passive UHF RFID tags[J]. IEEE Sensors Journal, 2017, 17(1): 185-193. doi: 10.1109/JSEN.2016.2624314 [13] MATBOULY H, ZANNAS K, DUROC Y, et al. Analysis and assessments of time delay constrains for passive RFID tag-sensor communication link: Application for rotation speed sensing[J]. IEEE Sensors Journal, 2017, 17(7): 2174-2181. doi: 10.1109/JSEN.2017.2662058 [14] 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7(2): 50-64. https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS202002009.htmYAN G M, DENG Y. Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning & Timing, 2020, 7(2): 50-64(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS202002009.htm [15] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 78-105.YAN G M, WENG J. Strapdown inertial navigation algorithm and principle of integrated navigation[M]. Xi'an: Northwestern Polytechnical University Press, 2019: 78-105(in Chinese). [16] SAVAGE P G. Strapdown inertial navigation integration algorithm design Part 1: Attitude algorithms[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(1): 19-28. [17] 秦永元, 张洪钺, 王叔华. 卡尔曼滤波与组合导航原理[M]. 2版. 西安: 西北工业大学出版社, 2012: 5-67.QIN Y Y, ZHANG H Y, WANG S H. Kalman filtering and principle of integrated navigation[M]. 2nd ed. Xi'an: Northwestern Polytechnical University Press, 2012: 5-67(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 673
- HTML全文浏览量: 312
- PDF下载量: 96
- 被引次数: 0
