



Distributed hierarchical formation-containment control of multiple quadrotor UAV systems
-
摘要:
针对带有多个领航者与跟随者的欠驱动四旋翼无人机群系统, 提出了一种分布式分层编队合围控制方法。设计分层分布式有限时间滑模估计器, 实现在仅有部分领航者获取到期望轨迹的条件下, 每架无人机都能生成其满足控制需求的估计位置信息。针对六自由度欠驱动四旋翼无人机模型的特点, 提出一种无人机位置层和姿态层的分层控制方法, 实现了无人机对所生成的估计位置的跟踪控制, 该方法采用高阶导数逼近算法, 防止在求解期望角速度的过程中出现微分爆炸。所提方法能在满足姿态稳定收敛的条件下实现有效的编队合围控制。通过数值仿真验证了所提方法的有效性。
Abstract:For the under-actuated quadrotor UAV swarm systems with multiple leaders and followers, a distributed hierarchical formation-containment control method is proposed. First, a hierarchical distributed finite-time sliding mode estimator is designed to achieve that each UAV can generate estimated position information that meets the control needs under the condition that only some leaders can obtain the desired trajectory. Then, considering the research object is an under-actuated six-degree-of-freedom quadrotor UAV model, a hierarchical control method of the UAV position layer and the attitude layer is proposed, which realizes the tracking control of the generated estimated position. This method adopts a high-order derivative approximation algorithm to prevent differential explosions in the process of solving the desired angular velocity. The given method can realize the effective formation-containment under the condition of satisfying the stable convergence of attitude. Finally, the accuracy and effectiveness of the proposed method are verified through numerical simulation.
-

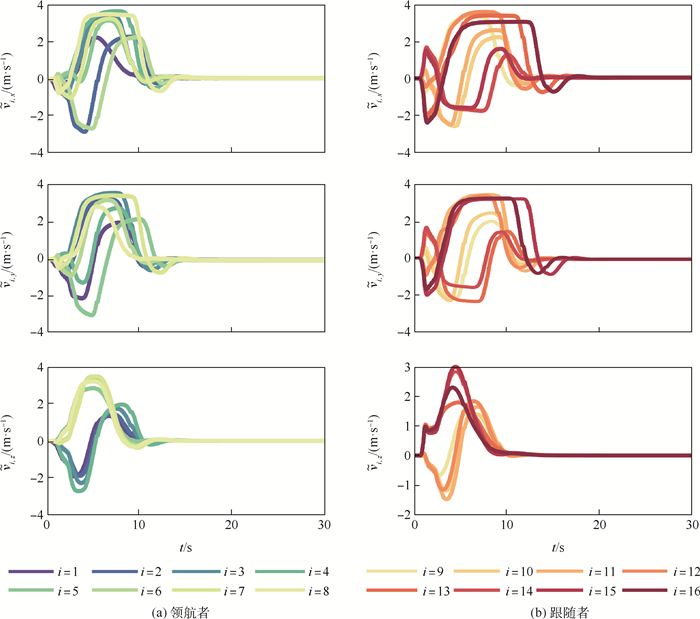
图 5 领航者与跟随者的期望速度估计误差
Figure 5. Estimated errors of leader and follower desired velocities

图 6 领航者与跟随者的估计速度跟踪误差
Figure 6. Tracking errors of leader and follower estimated velocities

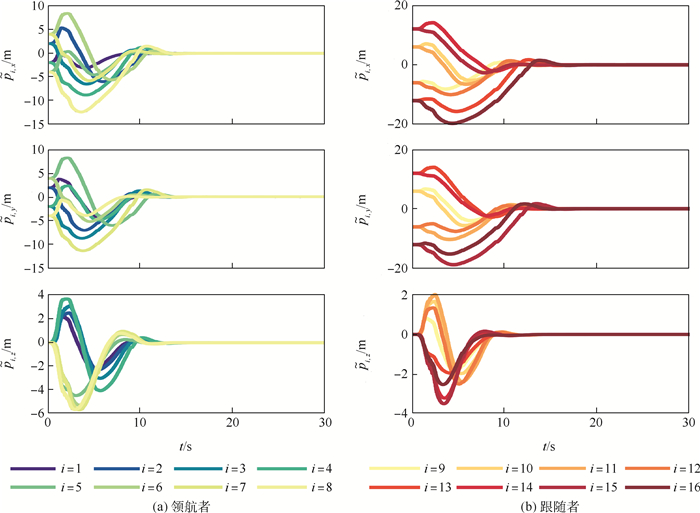
图 7 领航者与跟随者的期望位置估计误差
Figure 7. Estimated errors of leader and follower desired positions

图 8 领航者与跟随者的估计位置跟踪误差
Figure 8. Tracking errors of leader and follower estimated positions

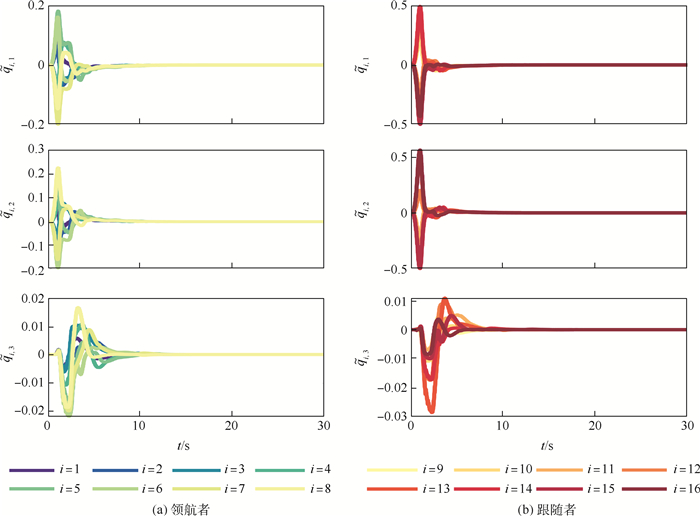
图 9 领航者与跟随者的角速度跟踪误差
Figure 9. Tracking errors of leader and follower angular velocities

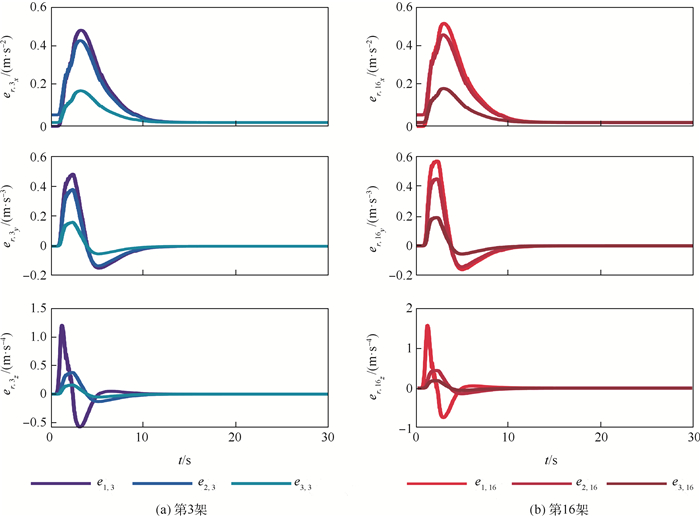
图 11 第3架与第16架四旋翼无人机对估计速度1~3阶导数的逼近误差
Figure 11. Approximation errors of the first to third derivatives of the 3rd and 16th quadrotor UAVs' estimated velocities
表 1 仿真条件
Table 1. Simulation conditions
控制参数 初始状态 α1=α2=α3=α4=8
kΞ=kd=1.5
ks=2
kq=kβ=20
kΨ=0.1
ζ0=ζ1=ζ2=ζ3=0.4
ξ0=ξ1=ξ2=ξ3=0.2p1(0)=[-2 2 0]T, p2(0)=[2 2 0]T
p3(0)=[2 -2 0]T, p4(0)=[-2 -2 0]T
p5(0)=[-4 4 0]T, p6(0)=[4 4 0]T
p7(0)=[4 -4 0]T, p8(0)=[-4 -4 0]T
p9(0)=[-6 6 0]T, p10(0)=[6 6 0]T
p11(0)=[6 -6 0]T, p12(0)=[-6 -6 0]T
p13(0)=[-12 12 0]T, p14(0)=[12 12 0]T
p15(0)=[12 -12 0]T, p16(0)=[-12 -12 0]TΔ0=Δ1=Δ2=Δ3=-1 vi(0)=[0 0 0]T, i∈1, 2, …, 16
ωi(0)=[0 0 0]T, i∈1, 2, …, 16
Qi(0)=[0 0 0 1]T, i∈1, 2, …, 16 下载: 导出CSV
下载: 导出CSV
-
[1] 韩亮, 任章, 董希旺, 等. 多无人机协同控制方法及应用研究[J]. 导航定位与授时, 2018, 5(4): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS201804002.htmHAN L, REN Z, DONG X W, et al. Research on cooperative control method and application for multiple unmanned aerial vehicles[J]. Navigation Positioning and Timing, 2018, 5(4): 1-7(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS201804002.htm [2] 马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850. doi: 10.13700/j.bh.1001-5965.2017.0281MA S Q, DONG C Y, MA M Y, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4): 841-850(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0281 [3] 徐扬, 罗德林, 周路鹏, 等. 基于增益矩阵的二阶集群系统鲁棒分布式立体编队控制[J]. 中国科学: 技术科学, 2020, 50(4): 461-474. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK202004008.htmXU Y, LUO D L, ZHOU L P, et al. A gain matrix approach for robust distributed 3D formation control with second order swarm systems[J]. Scientia Sinica: Technologica, 2020, 50(4): 461-474(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK202004008.htm [4] 任章, 郭栋, 董希旺, 等. 飞行器集群协同制导控制方法及应用研究[J]. 导航定位与授时, 2019, 6(5): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS201905003.htmREN Z, GUO D, DONG X W, et al. Research on the cooperative guidance and control method and application for aerial vehicle swarm systems[J]. Navigation Positioning and Timing, 2019, 6(5): 1-9(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DWSS201905003.htm [5] 陈杰, 辛斌. 有人/无人系统自主协同的关键科学问题[J]. 中国科学: 信息科学, 2018, 48(9): 1270-1274. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201809012.htmCHEN J, XIN B. Key scientific problems in the autonomous cooperation of manned-unmanned systems[J]. Scientia Sinica: Informationis, 2018, 48(9): 1270-1274(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201809012.htm [6] 段海滨, 张岱峰, 范彦铭, 等. 从狼群智能到无人机集群协同决策[J]. 中国科学: 信息科学, 2019, 49(1): 112-118. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htmDUAN H B, ZHANG D F, FAN Y M, et al. From wolf pack intelligence to UAV swarm cooperative decisionmaking[J]. Scientia Sinica: Informationis, 2019, 49(1): 112-118(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htm [7] LUO D L, SHAO J, XU Y, et al. Coevolution pigeon-inspired optimization with cooperation-competition mechanism for multi-UAV cooperative region search[J]. Applied Sciences, 2019, 9(5): 827. doi: 10.3390/app9050827 [8] 周绍磊, 祁亚辉, 张雷, 等. 切换拓扑下无人机集群系统时变编队控制[J]. 航空学报, 2017, 38(4): 320452. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201704025.htmZHOU S L, QI Y H, ZHANG L, et al. Time-varying formation control of UAV swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(4): 320452(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201704025.htm [9] 胡春鹤, 陈宗基. 基于Helly定理的多智能体最短时间一致性[J]. 北京航空航天大学学报, 2015, 41(9): 1701-1707. doi: 10.13700/j.bh.1001-5965.2014.0676HU C H, CHEN Z J. Helly-theorem-based time-optimal consensus for multi-agent systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9): 1701-1707(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0676 [10] REN W. Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory & Applications, 2007, 1(2): 505-512. [11] 姚辉, 席建祥, 王成, 等. 二阶多智能体系统自抗扰编队跟踪与避撞控制[J]. 北京航空航天大学学报, 2020, 46(5): 960-977. doi: 10.13700/j.bh.1001-5965.2019.0359YAO H, XI J X, WANG C, et al. Active disturbance rejection based formation tracking and collision avoidance control for second-order multi-agent system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 960-977(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0359 [12] 陈亮名. 考虑约束的多智能体Euler-Lagrange系统编队-包含控制[D]. 哈尔滨: 哈尔滨工业大学, 2019.CHEN L M. Formation-containment control of multi-agent Euler-Lagrange systems with constraints[D]. Harbin: Harbin Institute of Technology, 2019(in Chinese). [13] DONG X W. Formation and containment control for high-order linear swarm systems[M]. Berlin: Springer, 2016. [14] LI C J, CHEN L M, GUO Y N, et al. Formation-containment control for networked Euler-Lagrange systems with input saturation[J]. Nonlinear Dynamics, 2018, 91(2): 1307-1320. doi: 10.1007/s11071-017-3946-7 [15] CHEN L M, LI C J, MEI J, et al. Adaptive cooperative formation-containment control for networked Euler-Lagrange systems without using relative velocity information[J]. IET Control Theory & Applications, 2017, 11(9): 1450-1458. [16] DONG X W, YU B C, SHI Z Y, et al. Time-varying formation control for unmanned aerial vehicles: Theories and applications[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348. doi: 10.1109/TCST.2014.2314460 [17] DONG X W, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024. doi: 10.1109/TIE.2016.2593656 [18] ZHOU Y, DONG X W, LU G, et al. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies[C]//2014 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2014: 1203-1209. [19] ZHANG W Q, DONG C Y, RAN M P, et al. Fully distributed time-varying formation tracking control for multiple quadrotor vehicles via finite-time convergent extended state observer[J]. Chinese Journal of Aeronautics, 2020, 33(11): 2907-2920. doi: 10.1016/j.cja.2020.03.004 [20] XU Y, ZHAO S Y, LUO D L, et al. Affine formation maneuver control of high-order multi-agent systems over directed networks[J]. Automatica, 2020, 118: 109004. doi: 10.1016/j.automatica.2020.109004 [21] ZHAO S Y. Affine formation maneuver control of multiagent systems[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4140-4155. doi: 10.1109/TAC.2018.2798805 [22] SHAO X L, TIAN B, YANG W. Fixed-time trajectory following for quadrotors via output feedback[J]. ISA Transactions, 2021, 110: 213-224. doi: 10.1016/j.isatra.2020.10.039 [23] LI D Y, ZHANG W, HE W, et al. Two-layer distributed formation-containment control of multiple Euler-Lagrange systems by output feedback[J]. IEEE Transactions on Cybernetics, 2019, 49(2): 675-687. doi: 10.1109/TCYB.2017.2786318 [24] YU Y S, DING X L. A global tracking controller for underactuated aerial vehicles: Design, analysis, and experimental tests on quadrotor[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2499-2511. doi: 10.1109/TMECH.2016.2558678 [25] MENG Z Y, REN W, YOU Z. Distributed finite-time attitude containment control for multiple rigid bodies[J]. Automatica, 2010, 46(12): 2092-2099. doi: 10.1016/j.automatica.2010.09.005 [26] SHUSTER M D. A survey of attitude representations[J]. Journal of Astronautical Sciences, 1993, 41(4): 439-517. [27] HORN R A, JOHNSON C R. Matrix analysis[M]. Cambridge: Cambridge University Press, 2012. [28] BHAT S P, BERNSTEIN D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. doi: 10.1137/S0363012997321358 [29] ROBERTS A, TAYEBI A. Adaptive position tracking of VTOL UAVs[J]. IEEE Transactions on Robotics, 2011, 27(1): 129-142. doi: 10.1109/TRO.2010.2092870 [30] ZHU B, HUO W. Nonlinear control for a model-scaled helicopter with constraints on rotor thrust and fuselage attitude[J]. Acta Automatica Sinica, 2014, 40(11): 2654-2664. doi: 10.1016/S1874-1029(14)60411-0 [31] LI C Y, JING W X, GAO C S. Adaptive backstepping-based flight control system using integral filters[J]. Aerospace Science and Technology, 2009, 13(2-3): 105-113. doi: 10.1016/j.ast.2008.05.002 [32] XU Y, LUO D L, LI D Y, et al. Target-enclosing affine formation control of two-layer networked spacecraft with collision avoidance[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2679-2693. doi: 10.1016/j.cja.2019.04.016 -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 508
- HTML全文浏览量: 75
- PDF下载量: 83
- 被引次数: 0
