



-
摘要:
针对传统方法未考虑透视偏差的存在,提取椭圆圆心作为真实物理圆心投影点造成相机标定误差的问题,提出了一种基于平面变换的高精度相机标定方法。提取标定板内外边框上的角点,对标定板进行平面变换,将标记点由椭圆投影成近似的标准圆;利用图像矩提取标准圆圆心的坐标,投影回原标定板平面,得到标记点实际圆心的像素坐标;根据圆形标记点实际圆心的坐标,利用张正友标定法完成相机标定。实验结果表明:与传统方法相比,所提方法将相机标定的误差降低了66.169%,有效提高了相机标定的精度。
Abstract:Traditional methods do not consider the existence of perspective deviation, and usually extract the center of the ellipse as the projection point of a real physical center, resulting in camera calibration errors. A calibration method for high precision cameras was proposed based on plane transformation. The corner points on the inner and outer borders of the calibration plate were extracted to carry out the plane transformation of the calibration plate, and the marked points were projected from ellipses into approximate standard circles. The coordinates of the center of the standard circle were extracted by image moments, and were projected back to the plane of the original calibration plate to obtain the pixel coordinates of the actual center of the marked points. According to the coordinates of the actual center of the circular markers, the Zhang Zhengyou calibration method was used to complete the camera calibration. Experimental results show that compared thus the traditional method, the proposed method reduced the camera calibration error by 66.169%, thus effectively improving the camera calibration accuracy.
-

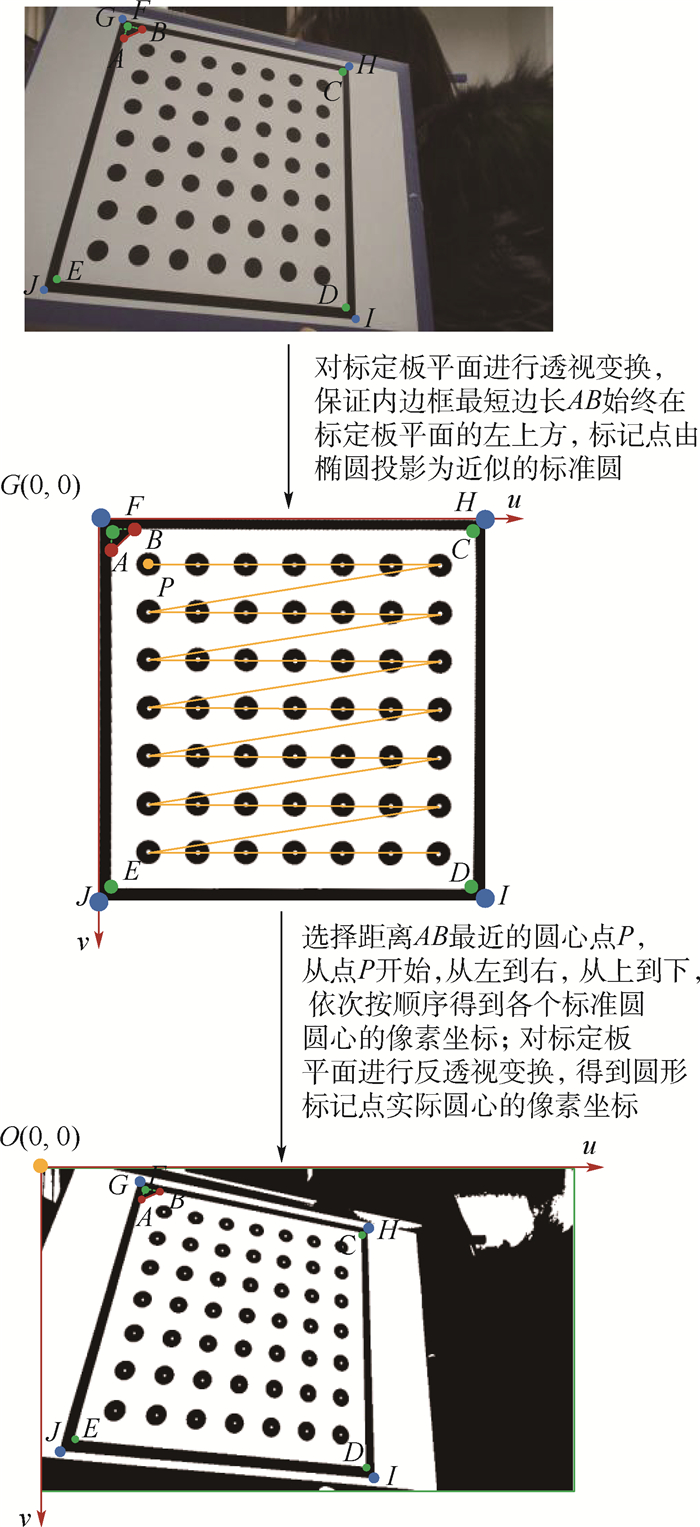
图 7 点阵标定板的像素坐标系轴线分布
Figure 7. Axis distribution of pixel coordinate system of lattice calibration plate

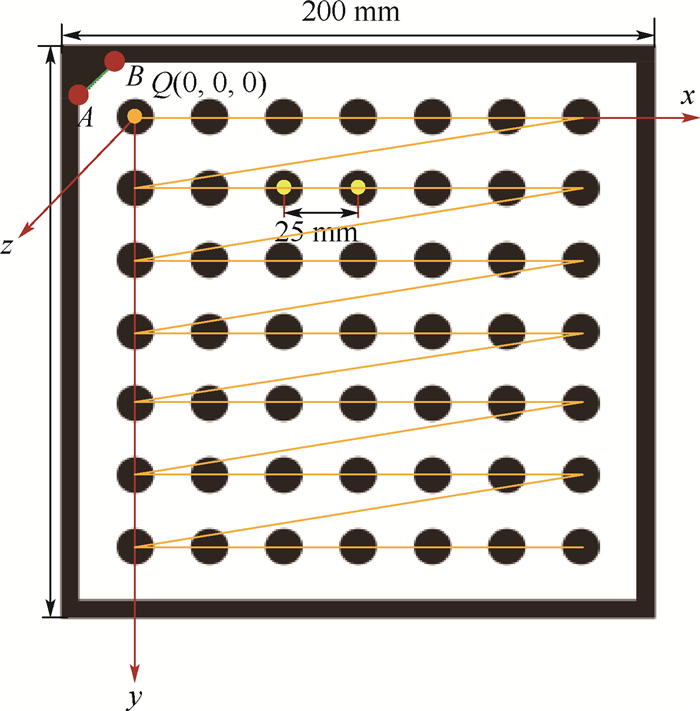
图 8 点阵标定板的世界坐标系轴线分布
Figure 8. Axis distribution of world coordinate system of lattice calibration plate
表 1 点阵标定板规格
Table 1. Specification of lattice calibration plate
参数 数值 标定板尺寸/mm 200×200 圆点数量/个 7×7 圆点直径/mm 12.5 圆心距/mm 25 外边框长度/mm 200 内边框长度/mm 187.5  下载: 导出CSV
下载: 导出CSV
表 2 相机标定结果对比
Table 2. Comparison of camera calibration results
参数 传统方法 本文方法 焦距 fx/像素 904.829 920.942 fy/像素 905.350 918.769 主点坐标 u0/像素 604.321 616.318 v0/像素 344.552 333.515 镜头畸变系数 k1 0.016 2 0.003 4 k2 0.010 2 0.002 0 k3 -0.103 4 -0.028 9 p1 0.001 3 -0.000 8 p2 -0.003 2 0.001 2
下载: 导出CSV
表 3 相机标定的重投影误差对比
Table 3. Comparison of re-projection errors in camera calibration
图像序号 重投影误差/像素 传统方法 本文方法 1 0.077 992 668 0.027 848 8 2 0.160 459 9 0.050 742 9 3 0.099 213 23 0.024 396 3 4 0.139 651 5 0.050 264 5 5 0.066 711 65 0.023 466 5 6 0.125 555 3 0.045 840 3 7 0.097 389 74 0.037 083 4 8 0.128 29 0.057 831 3 9 0.099 505 6 0.034 262 6 10 0.151 173 0.043 132 7 11 0.049 206 0.018 771 4 12 0.070 045 991 0.024 623 1 13 0.089 888 6 0.023 999 7 14 0.112 454 0.036 633 7 15 0.060 713 33 0.022 829 6 16 0.079 800 88 0.022 511 8
下载: 导出CSV
表 4 相机标定的平均重投影误差对比
Table 4. Comparison of average re-projection errors in camera calibration
标定方法 平均重投影误差/像素 传统方法 0.100 5 本文方法 0.034 0
下载: 导出CSV
-
[1] FAUGERAS O D, LUONG Q T, MAYBANK S J. Camera self-calibration: Theory and experiments[J]. Lecture Notes in Computer Science, 1992, 588(12): 321-334. [2] MAYBANK S J, FAUGERAS O D. A theory of self-calibration of a moving camera[J]. International Journal of Computer Vision, 1992, 8(2): 123-151. doi: 10.1007/BF00127171 [3] LI J, YANG Y, FU G. Camera self-calibration method based on GA-PSO algorithm[C]//Proceedings of IEEE International Conference on Cloud Computing and Intelligence Systems. Piscataway: IEEE Press, 2011: 149-152. [4] 王宪, 谭建平, 陈国强, 等. 基于主动视觉的测量装置精度校准方法[J]. 中南大学学报(自然科学版), 2014, 45(4): 1071-1076. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201404010.htmWANG X, TAN J P, CHEN G Q, et al. Active vision-based accuracy calibration technology for measurement devices[J]. Journal of Central South University(Science and Technology), 2014, 45(4): 1071-1076(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201404010.htm [5] ABDEL-AZIZ Y I, KARARA H M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry[J]. Photogrammetric Engineering and Remote Sensing, 2015, 81(2): 103-107. doi: 10.14358/PERS.81.2.103 [6] TSAI R Y. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J]. IEEE Journal on Robotics and Automation, 2003, 3(4): 323-344. [7] ZHANG Z Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 [8] 吴凡路, 刘建军, 任鑫, 等. 基于圆形标志点的深空探测全景相机标定方法[J]. 光学学报, 2013, 33(11): 139-145. https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201311023.htmWU F L, LIU J J, REN X, et al. Deep space exploration panoramic camera calibration technique based on circular markers[J]. Acta Optica Sinica, 2013, 33(11): 139-145(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201311023.htm [9] 汪首坤, 赵金枝, 姜明, 等. 基于圆形阵列标定板的张氏相机标定法[J]. 北京理工大学学报, 2019, 39(8): 92-96. https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201908014.htmWANG S K, ZHAO J Z, JIANG M, et al. Zhang's camera calibration method based on circular array calibration board[J]. Transactions of Beijing Institute of Technology, 2019, 39(8): 92-96(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201908014.htm [10] 卢晓冬, 薛俊鹏, 张启灿. 基于圆心真实图像坐标计算的高精度相机标定方法[J]. 中国激光, 2020, 47(3): 234-241. https://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ202003031.htmLU X D, XUE J P, ZHANG Q C. High camera calibration method based on true coordinate computation of circle center[J]. Chinese Journal of Lasers, 2020, 47(3): 234-241(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ202003031.htm [11] 段振云, 王宁, 赵文辉, 等. 基于点阵标定板的视觉测量系统的标定方法[J]. 光学学报, 2016, 36(5): 143-151. https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201605019.htmDUAN Z Y, WANG N, ZHAO W H, et al. Calibration method based on lattice calibration plate in vision measurement system[J]. Acta Optica Sinica, 2016, 36(5): 143-151(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201605019.htm [12] 李中伟, 王从军, 史玉升. 3D测量系统中的高精度摄像机标定算法[J]. 光电工程, 2008, 35(4): 58-63. https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC200804014.htmLI Z W, WANG C J, SHI Y S. High precision camera calibration algorithm for 3D measurement system[J]. Opto-Electronic Engineering, 2008, 35(4): 58-63(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC200804014.htm [13] 孔玮琦, 刘京南, 达飞鹏, 等. 基于一般成像模型的微小物体测量系统标定方法[J]. 光学学报, 2016, 36(9): 187-198. https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201609023.htmKONG W Q, LIU J N, DA F P, et al. Calibration method based on general imaging model for micro-object measurement system[J]. Acta Optica Sinica, 2016, 36(9): 187-198(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201609023.htm [14] 魏振忠, 张广军. 透视投影变换中椭圆中心畸变误差模型及其仿真研究[J]. 仪器仪表学报, 2003, 24(2): 160-164. doi: 10.3321/j.issn:0254-3087.2003.02.014WEI Z Z, ZHANG G J. A distortion error model of the perspective projection of ellipse center and its simulation[J]. Chinese Journal of Scientific Instrument, 2003, 24(2): 160-164(in Chinese). doi: 10.3321/j.issn:0254-3087.2003.02.014 [15] 吴建霖, 蒋理兴, 王安成, 等. 圆形标志投影偏心差补偿算法[J]. 中国图象图形学报, 2018, 23(10): 1549-1557. doi: 10.11834/jig.170680WU J L, JIANG L X, WANG A C, et al. Eccentricity error compensation for circular targets[J]. Journal of Image and Graphics, 2018, 23(10): 1549-1557(in Chinese). doi: 10.11834/jig.170680 [16] 解则晓, 王晓敏. 平面标定靶标标记点的圆心提取[J]. 光学精密工程, 2019, 27(2): 440-449. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201902020.htmXIE Z X, WANG X M. Research on extraction algorithm of projected circular centers of marked points on the planar calibration targets[J]. Optics and Precision Engineering, 2019, 27(2): 440-449(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201902020.htm -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 756
- HTML全文浏览量: 177
- PDF下载量: 124
- 被引次数: 0
