



Inertial pedestrian navigation algorithm based on zero velocity update and attitude self-observation
-
摘要:
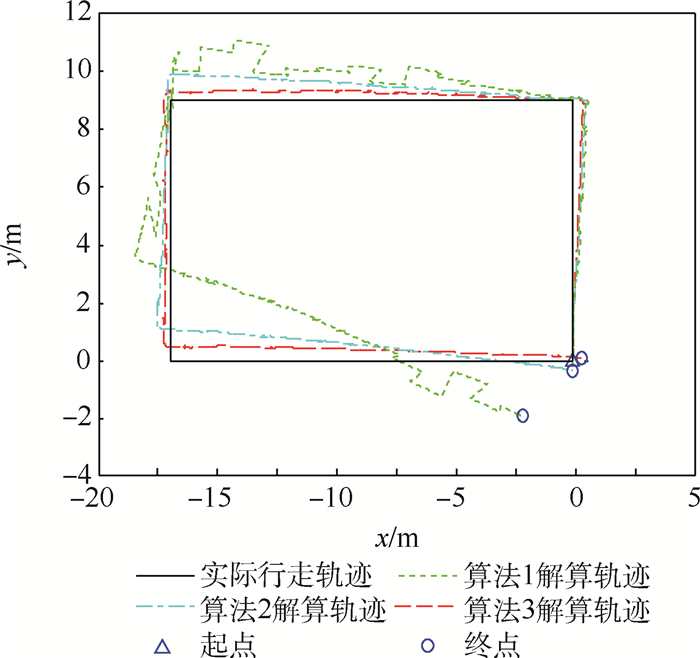
针对惯性行人导航中航向角发散致使导航精度降低的问题,提出了一种基于零速修正与姿态自观测的惯性行人导航算法。通过四条件零速检测算法对行走步态中的零速区间进行检测。在检测得到的零速区间内,利用零速修正算法原理构造速度误差的观测量;利用零速区间内行人脚部与地面保持静止、只受到重力加速度及姿态角不变的特性,构造姿态角误差的观测量。应用卡尔曼滤波对零速区间内的姿态角、速度及位置的误差进行估计。利用得到的误差状态估计结果对行人导航进行误差校正,提高惯性行人导航的精度。实验表明:小范围矩形路径中,所提算法的导航轨迹相对误差平均值仅占总路程的0.98%,比零速修正算法减小了78.11%;导航轨迹误差标准差仅为0.14 m,比零速修正算法减小了88.62%;400 m标准操场闭合路径中解算终点相对位置误差仅为1.18%。解算轨迹与实际轨迹匹配度较高,具有良好的应用价值。
Abstract:Aiming at the problem of reduced navigation accuracy caused by the divergence of the heading angle in inertial pedestrian navigation, an inertial pedestrian navigation algorithm based on zero velocity correction and attitude self-observation is proposed. A four-condition zero velocity detection algorithm is used to detect the zero velocity interval in the walking gait. In the detected zero velocity interval, the principle of the zero velocity update is used to construct the observation of the velocity error; the characteristic that only gravity acts and the heading angle remains unchanged in the zero velocity intervals is used to construct the observation of the attitude angle error. Then, the attitude angle, velocity and position error in the zero velocity interval are estimated by Kalman filtering. The error correction of pedestrian navigation is carried out using the obtained state estimation to further improve the accuracy of inertial pedestrian navigation. Actual walking experiments show that in the rectangular path, the average value of navigation trajectory relative error of this algorithm is only 0.98%, which is reduced by 78.11% compared with the zero velocity update algorithm and the standard deviation of navigation trajectory error of this algorithm is only 0.14 m, which is reduced by 88.62% compared with the zero velocity update algorithm. In the closed loop path of the classical 400 m playground, the relative position error of the solution end point is only 1.18%. The solved trajectory has a high degree of matching with the actual trajectory, which has good application value.
-

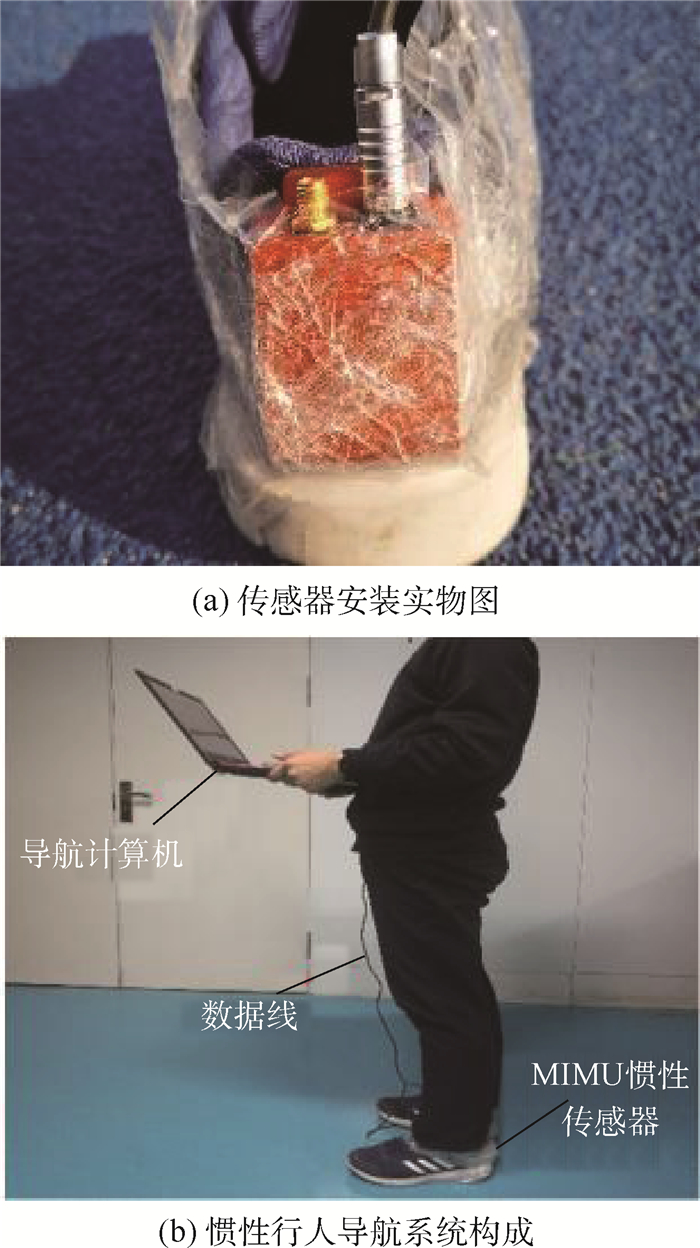
图 2 传感器安装实物图及惯性行人导航系统构成
Figure 2. Physical map of sensor installation positions and composition of inertial pedestrian navigation system

图 3 基于零速修正与姿态自观测的惯性行人导航算法原理
Figure 3. Working principle of zero velocity update and attitude self-observation algorithm of inertial pedestrian navigation

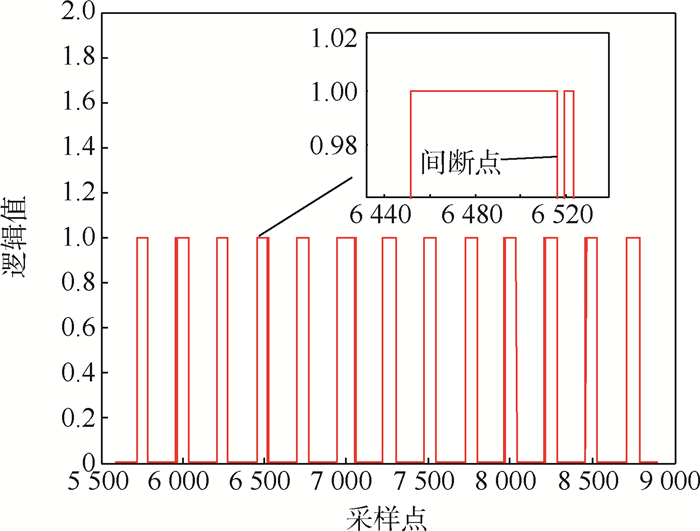
图 4 四条件零速检测算法零速检测结果
Figure 4. Results of zero velocity test of four-condition zero velocity detection algorithm
表 1 三种算法位置误差与导航轨迹误差
Table 1. Position error and navigation track error of three kinds of algorithm
m 算法 参考点坐标 对应点坐标 Δγ ΔR ΔS 零速修正算法(算法1) (0, 9) (0.68, 8.86) 0.69 2.33 1.23 (-17, 9) (-16.63, 10.71) 1.75 (-17, 0) (-18.52, 3.69) 3.99 (0, 0) (-2.12, -1.93) 2.87 零速修正与俯仰角、滚转角观测算法(算法2) (0, 9) (0.62, 8.83) 0.64 0.86 0.41 (-17, 9) (-16.84, 10.00) 1.01 (-17, 0) (-17.64, 1.29) 1.44 (0, 0) (0.04, -0.35) 0.35 零速修正与姿态自观测算法(算法3) (0, 9) (0.50, 8.84) 0.52 0.51 0.14 (-17, 9) (-17.00, 9.39) 0.39 (-17, 0) (-17.36, 0.65) 0.74 (0, 0) (0.38, 0.09) 0.39  下载: 导出CSV
下载: 导出CSV
表 2 三种算法解算终点的相对位置误差
Table 2. Relative position error of the end point of three kinds of algorithm
算法 起点坐标/m 终点坐标/m 位置误差/m 相对位置误差/% 零速修正算法(算法1) (0, 0) (-16.80, 51.33) 54.00 13.50 零速修正与俯仰角、滚转角观测算法(算法2) (0, 0) (31.50, -0.86) 31.51 7.88 零速修正与姿态自观测算法(算法3) (0, 0) (-1.50, 4.48) 4.72 1.18
下载: 导出CSV
-
[1] HUANG H, GARTNER G, KRISP J M, et al. Location based services: Ongoing evolution and research agenda[J]. Journal of Location Based Services, 2018, 12(2): 63-93. doi: 10.1080/17489725.2018.1508763 [2] XIN S, LI X, GENG J, et al. The implementation of multi-GNSS real-time precise point positioning service system: GPS/GLONASS[C]//2017 Forum on Cooperative Positioning and Service (CPGPS). Piscataway: IEEE Press, 2017: 202-207. [3] SUN W, XUE M, YU H, et al. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression[J]. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10896-10905. doi: 10.1109/TVT.2018.2870160 [4] ZHUANG Y, YANG J, LI Y, et al. Smartphone-based indoor localization with bluetooth low energy beacons[J]. Sensors, 2016, 16(5): 596. doi: 10.3390/s16050596 [5] QI J, LIU G P. A robust high-accuracy ultrasound indoor positioning system based on a wireless sensor network[J]. Sensors, 2017, 17(11): 2554. doi: 10.3390/s17112554 [6] SUN W, DING W, YAN H F, et al. Zero velocity interval detection based on a continuous hidden Markov model in micro inertial pedestrian navigation[J]. Measurement Science and Technology, 2018, 29(6): 7. [7] FOXLIN E. Pedestrian tracking with shoe-mounted inertial sensors[J]. IEEE Computer Graphics and Applications, 2005, 25(6): 38-46. doi: 10.1109/MCG.2005.140 [8] 徐元, 陈熙源, 李庆华, 等. 一种基于双IMU框架的室内个人导航方法[J]. 中国惯性技术学报, 2015, 23(6): 714-717. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201506003.htmXU Y, CHEN X Y, LI Q H, et al. An indoor personal navigation method based on double IMU framework[J]. Chinese Journal of Inertial Technology, 2015, 23(6): 714-717(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201506003.htm [9] ABDULRAHIM K, HIDE C, MOORE T, et al. Aiding low cost inertial navigation with building heading for pedestrian navigation[J]. Journal of Navigation, 2011, 64(2): 219-233. doi: 10.1017/S0373463310000573 [10] WANG Q, YIN J, NOURELDIN A, et al. Research on an improved method for foot-mounted inertial/magnetometer pedestrian-positioning based on the adaptive gradient descent algorithm[J]. Sensors, 2018, 18(12): 4105. doi: 10.3390/s18124105 [11] QIU S, WANG Z L, ZHAO H Y, et al. Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion[J]. Information Fusion, 2018, 39: 108-119. doi: 10.1016/j.inffus.2017.04.006 [12] 郑伟伟, 戴邵武, 王希彬, 等. 惯性行人导航系统传感器安装位置研究[J]. 传感技术学报, 2020, 33(6): 815-824. doi: 10.3969/j.issn.1004-1699.2020.06.006ZHENG W W, DAI S W, WANG X B, et al. Research on sensor installation position of inertial pedestrian navigation system[J]. Chinese Journal of Sensors and Actuators, 2020, 33(6): 815-824(in Chinese). doi: 10.3969/j.issn.1004-1699.2020.06.006 [13] 戴洪德, 李松林, 周绍磊, 等. 基于伪标准差和N-P准则的行人导航零速检测[J]. 中国惯性技术学报, 2018, 26(6): 701-707. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806001.htmDAI H D, LI S L, ZHOU S L, et al. Zero speed detection of pedestrian navigation based on pseudo standard deviation and N-P criterion[J]. Chinese Journal of Inertial Technology, 2018, 26 (6): 701-707(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806001.htm [14] 陈国良, 杨洲. 基于加速度量测幅值零速检测的计步算法研究[J]. 武汉大学学报(信息科学版), 2017, 42(6): 726-730. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201706003.htmCHEN G L, YANG Z. Research on step-counting algorithm based on accelerated measurement amplitude zero velocity detection[J]. Geomatics and Information Science of Wuhan University, 2017, 42(6): 726-730(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201706003.htm [15] ZHENG L, ZHOU W, TANG W, et al. A 3D indoor positioning system based on low-cost MEMS sensors[J]. Simulation Modelling Practice and Theory, 2016, 65: 45-56. doi: 10.1016/j.simpat.2016.01.003 [16] 周绍磊, 李松林, 戴洪德, 等. 一种优化高度通道的行人导航算法[J]. 海军航空工程学院学报, 2018, 33(5): 60-66. https://www.cnki.com.cn/Article/CJFDTOTAL-HJHK201805010.htmZHOU S L, LI S L, DAI H D, et al. A pedestrian navigation algorithm for optimizing elevation channel[J]. Journal of Naval Aeronautical Engineering Institute, 2018, 33(5): 60-66(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HJHK201805010.htm [17] 秦永元. 惯性导航[M]. 北京: 科学出版, 2014: 4-7.QIN Y Y. Inertial navigation[M]. Beijing: Science Press, 2014: 4-7(in Chinese). -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 639
- HTML全文浏览量: 178
- PDF下载量: 291
- 被引次数: 0
