



Warship's vital parts detection algorithm based on lightweight Anchor-Free network with multi-scale feature fusion
-
摘要:
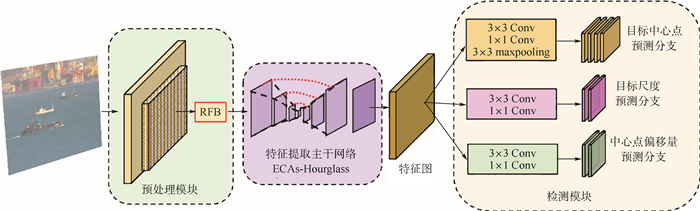
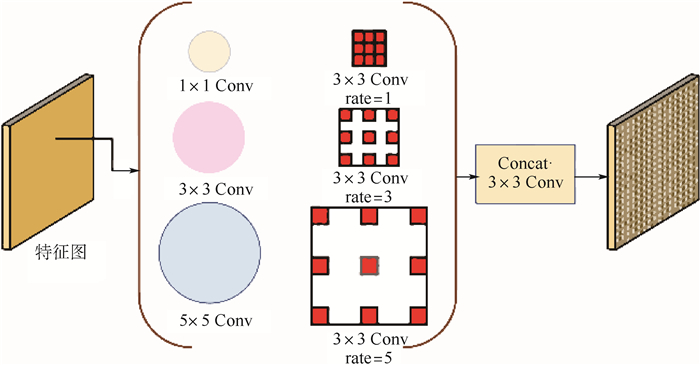
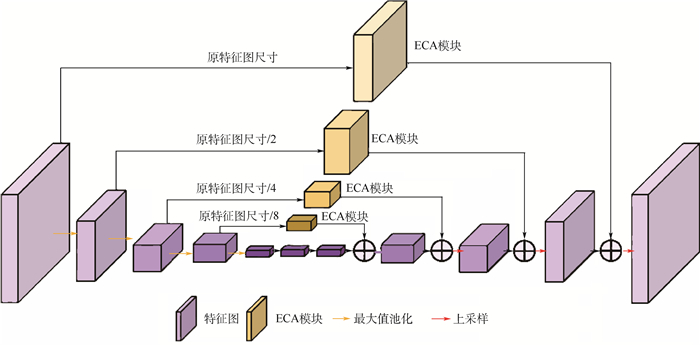
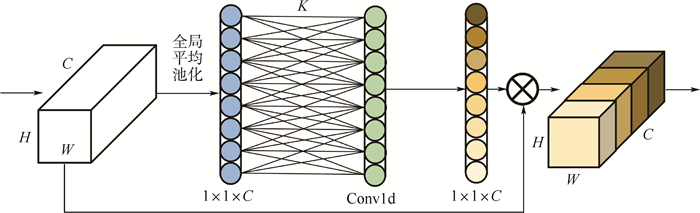
反舰导弹对舰船要害部位的精确打击能力是精确制导武器的关键技术之一。针对反舰导弹导引头对舰船要害部位检测精度低、特征提取能力不足,预测框的处理降低检测速度等问题,提出了一种多尺度特征融合的Anchor-Free轻量化舰船要害部位检测算法。由于舰船要害部位检测数据具有多尺度、多角度特性,引入多尺度特征融合模块,综合利用不同感受野的检测信息,优化特征提取;利用高效轻量化注意力机制改进Hourglass结构中的跨层连接,提升检测精度,降低算法总参数量;使用迁移学习有效提升算法收敛效果。在建立的舰船要害部位检测数据集和公开的PASCAL VOC数据集进行实验,检测准确率分别提升了4.41%和5.57%,分析算法参数与运算量,设计了模块消融实验,论证了所提算法的有效性。
Abstract:One of the key technologies of precision-guidance weapons is the anti-ship missile's ability to strike vital parts of a warship with pinpoint accuracy. Aiming at the problems of low detection accuracy, insu-fficient ability in feature extraction and the processing of the generated-anchors reduces the detection speed in anti-ship missile seekers, a warship's vital parts detection algorithm based on a lightweight Anchor-Free network with multi-scale feature fusion is proposed. Due to the multi-scale and multi-angle characteristics of the vital parts detection data, the multi-scale feature fusion module is introduced to optimize the feature extraction by comprehensively using the detection information of different receptive fields. To boost the detection accuracy and reduce the total parameters of the algorithm, the skip connections in Hourglass are enhanced by using the efficient and lightweight attention mechanism. The transfer-learning is used to improve the convergence of this algorithm effectively. Experiments were carried out on the dataset of the warship's vital parts and the PASCAL VOC. Experimental results show the mAP is increased by 4.41% and 5.57% respectively. The algorithm's parameters and the computation are analyzed. The module ablation experiments are designed to demonstrate the effectiveness of the algorithm.
-
Key words:
- target detection /
- Anchor-Free algorithm /
- attention mechanism /
- feature fusion /
- CenterNet /
- anti-ship missile
-

图 10 部分舰船要害部位检测结果及热力图
Figure 10. Detection results and heat-map of warships' vital parts

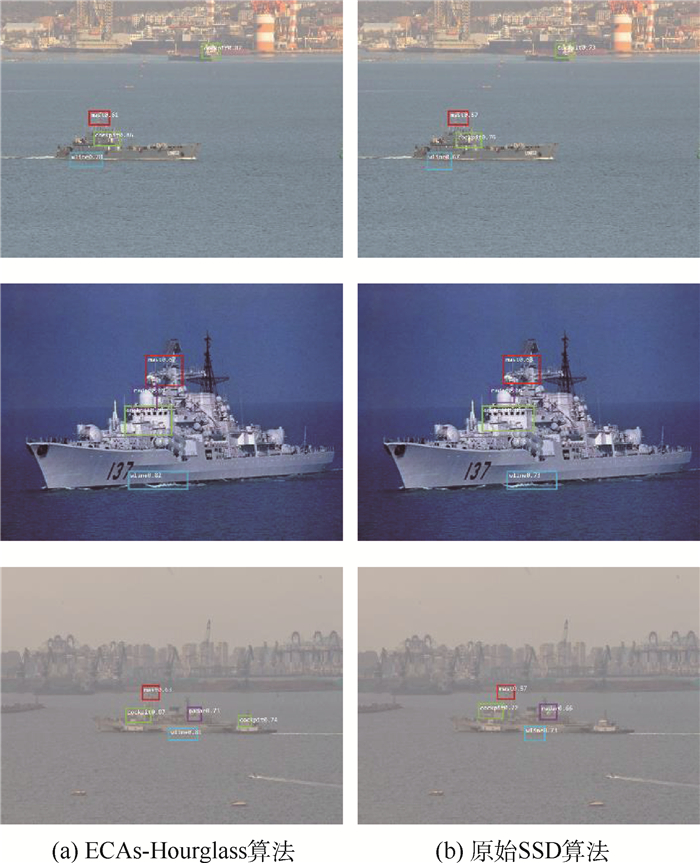
图 12 原始SSD算法与ECAs-Hourglass算法对比
Figure 12. Comparison of original SSD and ECAs-Hourglass algorithms
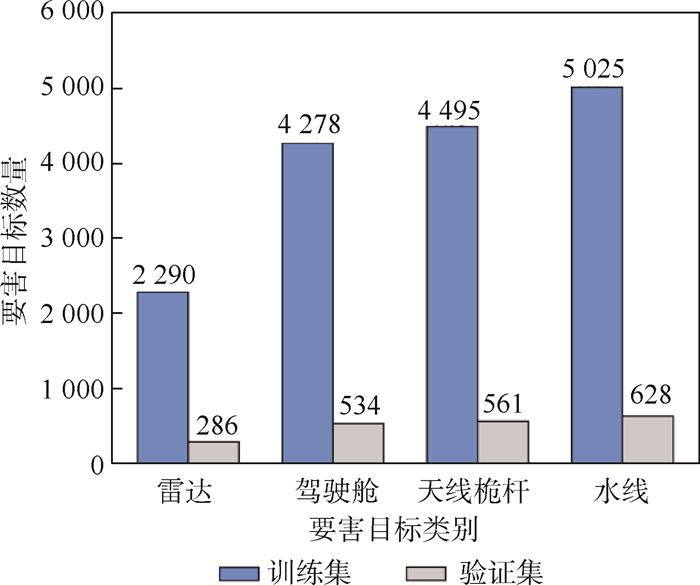
表 1 舰船要害部位检测数据集信息
Table 1. Dataset information of warships' vital parts
数据集参数 数值 要害部位 图像数量/张 数据总数 6 402 雷达 2 863 训练集 5 122 驾驶舱 5 348 测试集 640 天线桅杆 5 619 验证集 640 水线 6 282  下载: 导出CSV
下载: 导出CSV
算法 参数量/106 运算量/109 TOP-1准确率/% ResNet 42.49 7.34 76.83 ResNet+SE 47.01 7.35 77.62 ResNet+CBAM 47.01 7.35 78.49 ResNet+AA 45.40 8.05 78.70 ResNet+ECA 42.49 7.35 78.65
下载: 导出CSV
表 3 实验环境
Table 3. Experimental environment
参数 配置信息 CPU AMD Ryzen 9 3900X CPU显存 32 GB GPU GEFORCE RTX 2080Ti GPU显存 11 GB IDE Pycharm、gedit、vim 系统 Ubuntu 16.04 LTS 语言 Python 加速环境 CUDA10.0,CuDNN7.6 深度学习框架 Pytorch1.0
下载: 导出CSV
表 4 舰船要害部位检测数据集测试结果
Table 4. Test results of warships' vital parts dataset
算法 图像分辨率 mAP/% 检测速度/FPS SSD 500×500 72.34 29 Mask R-CNN 512×384 73.65 16 ResNet18 512×512 72.51 28 迁移原参数
CenterNet-Hourglass(simple)512×512 71.95 28 CenterNet-Hourglass (simple) 512×512 73.27 27 CenterNet-Hourglass (double) 512×512 77.21 12 本文算法 512×512 77.68 28 注:simple表示单级Hourglass网络结构,double表示双级Hourglass网络结构。
下载: 导出CSV
表 5 不同比例训练集与测试集测试结果
Table 5. Test results with different ratio of training set and validation set
训练集与测试集比例 mAP/% 8∶1 77.68 7∶2 75.43 6∶3 77.26
下载: 导出CSV
表 6 网络模型参数与运算量
Table 6. Parameters and operands of models
网络结构 RFB ECA(main) ECA+Hourglass 参数量/106 运算量/106 Simple-Hourglass* 95.43 143 501.03 Simple-Hourglass* √ 95.76 148 710.35 Simple-Hourglass* √ 96.75 142 829.95 Simple-Hourglass** √ 74.95 87 444.16 Simple-Hourglass** √ √ √ 76.26 103 653.97 Double-Hourglass* 191.57 297 420.71 Double-Hourglass* √ 191.56 296 816.73 Double-Hourglass** √ 191.56 292 211.39 Double-Hourglass* √ 150.26 181 305.61 Double-Hourglass** √ √ 150.27 186 514.94 Double-Hourglass** √ √ √ 150.27 18 6521.93 本文算法** √ √ 75.09 91 653.48 注:main表示将ECA模块添加在主干网络中,ECA+Hourglass表示将ECA并行连接在Hourglass结构中。
下载: 导出CSV
表 7 对比测试与消融实验
Table 7. Comparison test and ablation experiment
网络结构 RFB ECA (main) ECA+ Hourglass mAP/% 检测速度/FPS SPP-Net 59.5 10 YOLO 65.79 33 Mask R-CNN 68.82 15 Simple-Hourglass* 61.06 33 Simple-Hourglass** √ 65.18 25 Simple-Hourglass** √ 63.31 23 Simple-Hourglass** √ 63.99 30 Simple-Hourglass** √ √ √ 64.69 25 本文算法** √ √ 66.63 29
下载: 导出CSV
-
[1] QI S, MA J, LIN J, et al. Unsupervised ship detection based on saliency and S-HOG descriptor from optical satellite images[J]. Geoscience and Remote Sensing Letters, 2015, 12(7): 1451-1455. doi: 10.1109/LGRS.2015.2408355 [2] 黄洁, 姜志国, 张浩鹏, 等. 基于卷积神经网络的遥感图像舰船目标检测[J]. 北京航空航天大学学报, 2017, 43(9): 1841-1848. doi: 10.13700/j.bh.1001-5965.2016.0755HUANG J, JIANG Z G, ZHANG H P, et al. Ship object detection in remote sensing images using convolutional neural networks[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(9): 1841-1848(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0755 [3] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031 [4] 李健伟, 曲长文, 彭书娟, 等. 基于卷积神经网络的SAR图像舰船目标检测[J]. 系统工程与电子技术, 2018, 40(9): 1953-1959. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201809009.htmLI J W, QU C W, PENG S J, et al. Ship detection in SAR images based on convolutional neural network[J]. Systems Engineering and Electronics, 2018, 40(9): 1953-1959(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201809009.htm [5] 张旭. 基于深度学习的双阶段舰船检测算法研究[D]. 南京: 东南大学, 2019: 35-40.ZHANG X. Research on two-state ship detection method based on deep learning[D]. Nanjing: Southeast University, 2019: 35-40(in Chinese). [6] GAO L R, HE Y Q, SUN X, et al. Incorporating negative sample training for ship detection based on deep learning[J]. Sensors, 2019, 19(3): 684-704. doi: 10.3390/s19030684 [7] 王玺坤, 姜宏旭, 林珂玉. 基于改进型YOLO算法的遥感图像舰船检测[J]. 北京航空航天大学学报, 2020, 46(6): 1184-1191. doi: 10.13700/j.bh.1001-5965.2019.0394WANG X K, JIANG H X, LIN K Y. Remote sensing image ship detection based on modified YOLO algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1184-1191(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0394 [8] WANG Y Y, WANG C, ZHANG H, et al. Automatic ship detection based on RetinaNet using multi-resolution Gaofen-3 imagery[J]. Remote Sensing, 2019, 11(5): 531-545. doi: 10.3390/rs11050531 [9] 杨龙, 苏娟, 李响. 基于深度卷积神经网络的SAR舰船目标检测[J]. 系统工程与电子技术, 2019, 41(9): 1990-1997. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201909011.htmYANG L, SU J, LI X. Ship detection in SAR images based on deep convolutional neural network[J]. Systems Engineering and Electronics, 2019, 41(9): 1990-1997(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201909011.htm [10] 郑婷婷, 杨雪, 戴阳. 基于关键点的Anchor-Free目标检测模型综述[J]. 计算机系统应用, 2020, 29(8): 1-8. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYY202008002.htmZHENG T T, YANG X, DAI Y. Overview of Anchor-Free object detection model based on key points[J]. Computer Systems and Applications, 2020, 29(8): 1-8(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYY202008002.htm [11] TIAN Z, SHEN C H, CHEN H, et al. FCOS: Fully convolutional one-stage object detection[C]//Proceedings of the Conference on International Conference on Computer Vision. Piscataway: IEEE Press, 2019: 1-13. [12] ZHOU X Y, WANG D Q, PHILIPP K, et al. Objects as points[EB/OL]. (2019-04-25)[2021-01-20]. https://arxiv.org/abs/1904.07850. [13] HOU Q B, ZHANG L, CHENG M M, et al. Strip pooling: Rethinking spatial pooling for scene parsing[C]//Proceedings of the Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 4002-4011. [14] XIAO B, WU H P, WEI Y C. Simple baselines for human pose estimation and tracking[C]//Proceedings of the Conference on European Conference on Computer Vision. Berlin: Springer, 2018: 472-487. [15] YU F, WANG D, SHELHAMER E, et al. Deep layer aggregation[C]//Proceedings of the Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 2403-2412. [16] WANG Q L, WU B G, ZHU P F, et al. Efficient channel attention for deep convolutional neural networks[C]//Proceedings of the Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 1-12. [17] 王新, 李喆, 张宏立. 一种迭代聚合的高分辨率网络Anchor-free目标检测方法[J]. 北京航空航天大学学报, 2021, 47(12): 2533-2541. doi: 10.13700/j.bh.1001-5965.2020.0484WANG X, LI Z, ZHANG H L. High resolution network Anchor-free object detection method based on iterative aggregation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2533-2541(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0484 [18] HU J, SHEN L, ALBANIE S, et al. Squeeze-and-excitation networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(8): 2011-2023. [19] 张雪松, 庄严, 闫飞, 等. 基于迁移学习的类别级物体识别与检测研究与进展[J]. 自动化学报, 2019, 45(7): 1224-1243. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907002.htmZHANG X S, ZHUANG Y, YAN F, et al. Status and development of transfer learning based category-level object recognition and detection[J]. Acta Automatica Sinica, 2019, 45(7): 1224-1243(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201907002.htm [20] WANG Y Y, WANG C, ZHANG H. Combining a single shot multibox detector with transfer learning for ship detection using sentinel-1 SAR images[J]. Remote Sensing Letters, 2018, 9(8): 780-788. [21] BRIJRAJ S, DURGA T, KUMAR A S. Shunt connection: An intelligent skipping of contiguous blocks for optimizing MobileNet-V2[J]. Neural Networks, 2019, 118: 192-203. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 456
- HTML全文浏览量: 117
- PDF下载量: 54
- 被引次数: 0
