



-
摘要:
针对磁悬浮控制敏感陀螺(MSCSG)空间应用问题,研究其多自由度角动量包络模型。依据MSCSG的机械结构,分析磁悬浮转子径向万向偏转特性,明晰MSCSG轴向一个自由度转子转速变化飞轮力矩和径向两自由度转子万向偏转陀螺力矩输出机理。基于洛伦兹力磁轴承(LFMB)原理,分析径向偏转力矩与控制电流的线性关系,揭示MSCSG陀螺力矩高精度高带宽的优势。考虑转子径向偏角和轴向转速饱和问题,基于重构偏角和旋转矩阵构建MSCSG角动量包络模型。仿真分析了MSCSG径向偏转力矩高精度高带宽、轴向飞轮力矩高精度的特性。开展MSCSG偏转力矩高带宽性能测试,实验验证MSCSG能够输出大于100 Hz的径向偏转力矩。研究结果表明,MSCSG具有航天器高动态微振动抑制和高精度姿态控制的空间应用前景。
-
关键词:
- 磁悬浮控制敏感陀螺(MSCSG) /
- 洛伦兹力磁轴承(LFMB) /
- 角动量包络 /
- 力矩包络 /
- 高精度高带宽
Abstract:Aiming at engineering application problems, the multi-degree-of-freedom angular momentum envelope model of magnetically suspended control and sensing gyroscope (MSCSG) is studied. Based on the mechanical structure of MSCSG, the characteristics of radial universal deflection of magnetic suspension rotor are analyzed. Axial 1-DOF Flywheel torque and radial 2-DOF gyroscope torque output mechanism of MSCSG are clarified. Based on the Lorentz force magnetic bearing (LFMB) principle, the linear relationship between the radial deflection torque and the control current is analyzed, which reveals the advantages of the MSCSG torque with high precision, high bandwidth and small amplitude. Considering rotor speed saturation, the MSCSG angular momentum envelope model is constructed based on deflection reconstruction and rotation matrix. The simulation shows that although radial deflection torque has a high bandwidth, small amplitude, and axial flywheel torque has a high precision and large magnitude. High bandwidth performance test of the MSCSG deflection torque is carried out, showing that MSCSG can output radial deflection torque whose frequency is greater than 100 Hz. It is shown that MSCSG has the prospect of strong micro-vibration suppression under high dynamic conditions and high precision attitude control.
-

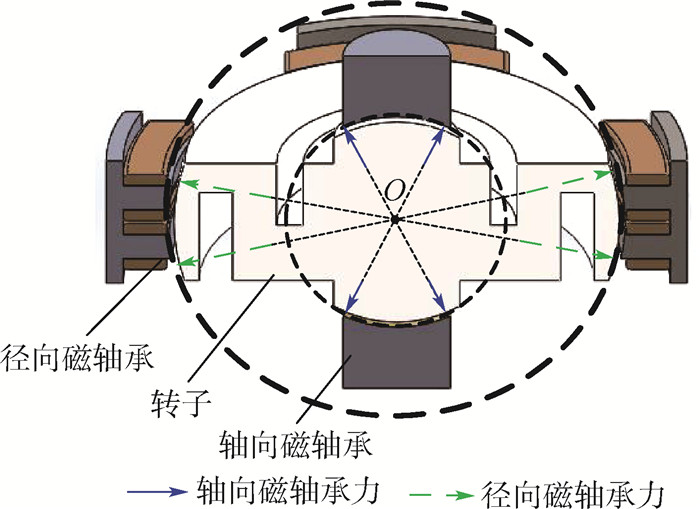
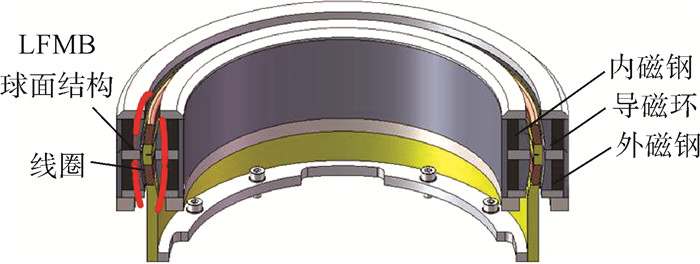
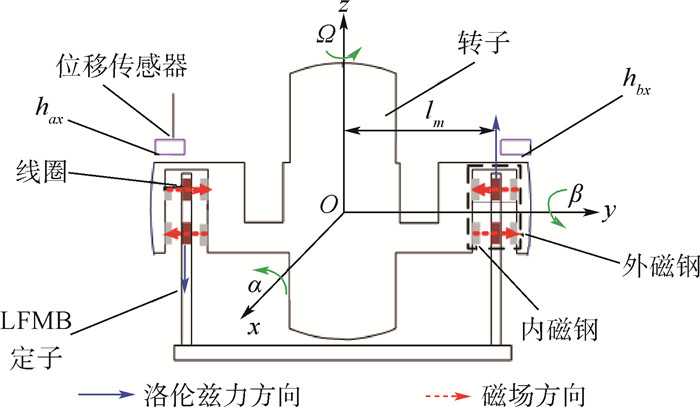
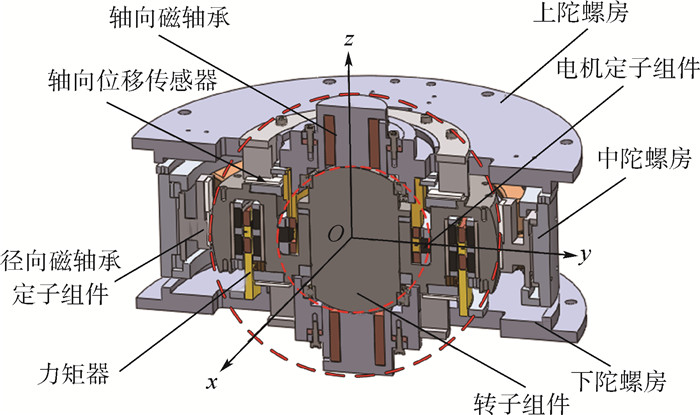
图 2 MSCSG径向磁轴承和轴向磁轴承结构
Figure 2. MSCSG radial magnetic bearing and axial magnetic bearing structure

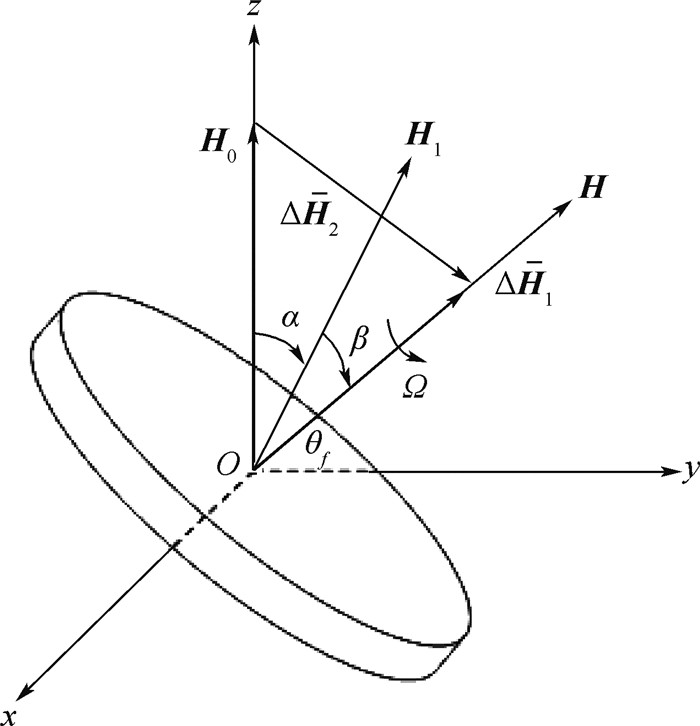
图 4 MSCSG角动量变化生成力矩示意图
Figure 4. Schematic diagram of torque generated by MSCSG angular momentum change

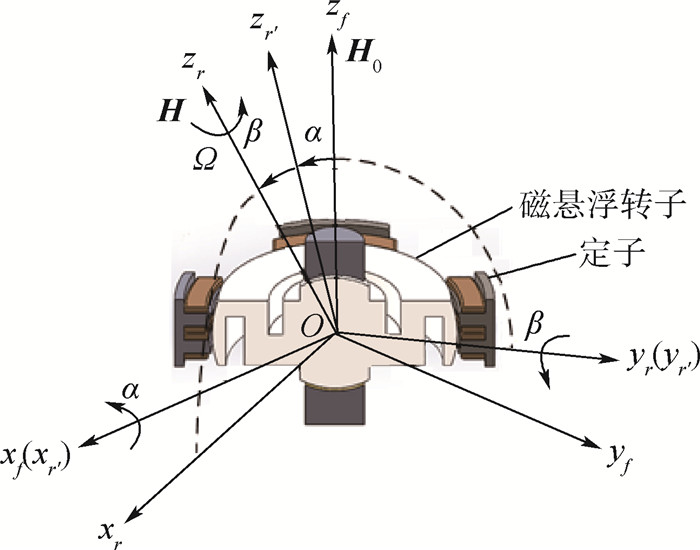
图 6 MSCSG角动量交换坐标系相对运动关系示意图
Figure 6. Schematic diagram of relative motion relationship of MSCSG angular momentum exchange coordinate system

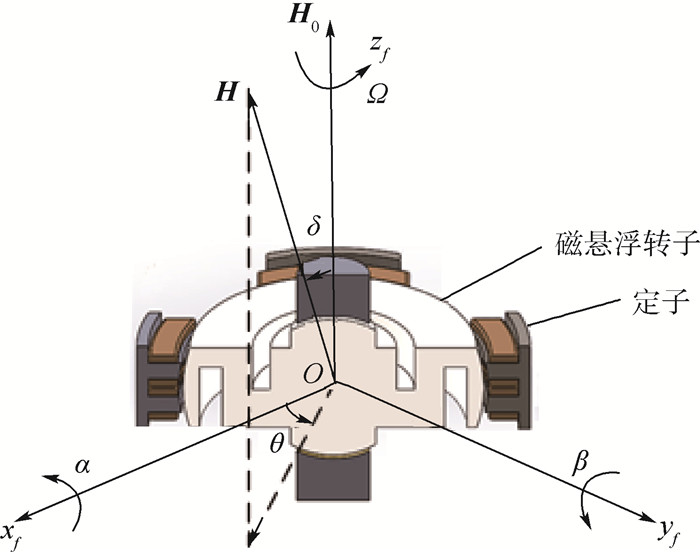
图 7 MSCSG转子偏转角映射至偏转经纬度示意图
Figure 7. Schematic diagram of MSCSG rotor deflection angle mapped to deflection latitude and longitude

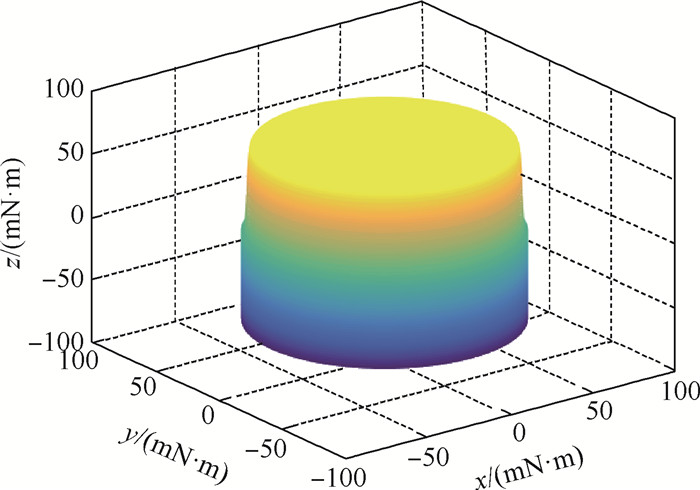
图 9 转子转速不变情况下单MSCSG角动量包络
Figure 9. Single MSCSG angular momentum envelope under the condition of constant rotor speed on curve

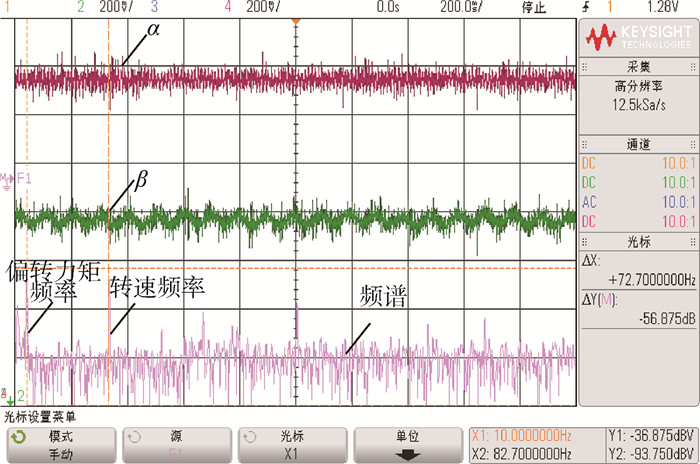
图 13 控制信号为10 Hz时MSCSG带宽性能测试结果
Figure 13. MSCSG bandwidth performance test results when control signal frequency is 10 Hz

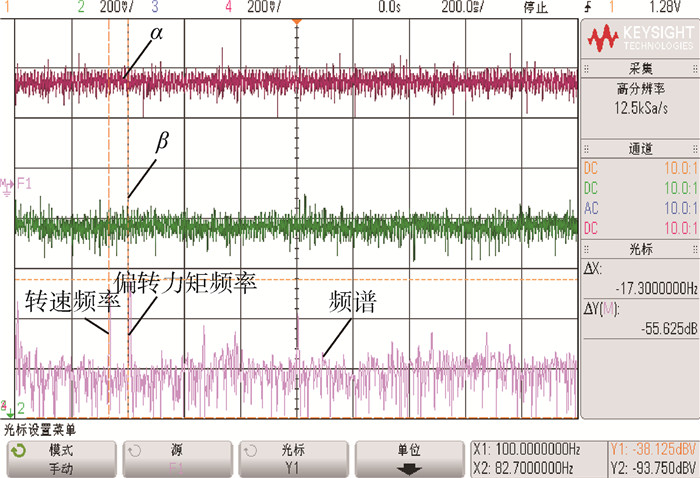
图 14 控制信号频率为104.7 Hz时MSCSG带宽性能测试结果
Figure 14. MSCSG bandwidth performance test results when control signal frequency is 104.7 Hz
-
[1] REN Y, CHEN X C, CAI Y W, et al. Attitude-rate measurement and control integration using magnetically suspended control and sensitive gyroscopes[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4921-4932. doi: 10.1109/TIE.2017.2772161 [2] 王卫杰, 任元, 刘强, 等. 球面磁悬浮万向飞轮转子轮盘优化设计[J]. 航空学报, 2016, 37(9): 2874-2883. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201609025.htmWANG W J, REN Y, LIU Q, et al. Optimal design of rotary table for spherical rotor of magnetically suspending gambling flywheel[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(9): 2874-2883(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201609025.htm [3] YU C M, WANG Z, REN Y, et al. MSCSG two degree of freedom attitude measurement method[J]. Journal of Physics: Conference Series, 2019, 1176(4): 042054. [4] YIN Z Y, CAI Y, LIU B, et al. Application of spherical magnetic bearing in magnetically suspended control and sensitive gyro[J]. Mathematical Problems in Engineering, 2020, 2020: 7698794. [5] 杨倩. 动基座下双框架MSCMG磁轴承系统稳定性研究[D]. 北京: 北京航空航天大学, 2011: 17-21.YANG Q. Research on stability of magnetic bearing system for double gimbal magnetically suspended control moment gyroscope on moving base[D]. Beijing: Beihang University, 2011: 17-21(in Chinese). [6] 任元, 王卫杰, 刘强, 等. 一种磁悬浮控制敏感陀螺: CN104613950B[P]. 2017-06-27.REN Y, WANG W J, LIU Q, et al. A kind of magnetically suspended control and sensing gyroscopic: CN104613950B[P]. 2017-06-27(in Chinese). [7] 王鹏宇. 大挠性航天器振动抑制及姿态控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2017: 1-2.WANG P Y. Vibration suppression and attitude control for flexible spacecraft[D]. Harbin: Harbin Institute of Technology, 2017: 1-2(in Chinese). [8] MARGULIES G AUBURN J N. Geometric theory of single-gimbal control moment gyro systems[J]. Journal of the Astronautical Sciences, 1978, 26(2): 159-191. [9] BONG W. Singularity analysis and visualization for single-gimbal control moment gyro systems[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(2): 271-282. doi: 10.2514/1.9167 [10] TANG L, XU S J. Geometric analysis of singularity for single-gimbal control moment gyro systems[J]. Chinese Journal of Aeronautics, 2005, 18(4): 9-17. https://www.sciencedirect.com/science/article/pii/S1000936111602483 [11] 王磊, 赵育善. 双框架控制力矩陀螺奇异分析及可视化[J]. 宇航学报, 2009, 30(2): 613-619. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200902042.htmWANG L, ZHAO Y S. Singularity analysis and visualization of double-gimbaled control moment gyro systems[J]. Journal of Astronautics, 2009, 30(2): 613-619(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200902042.htm [12] 刘锋. 金字塔构型变速控制力矩陀螺操纵律和参数优化设计[D]. 哈尔滨: 哈尔滨工业大学, 2018: 18-20.LIU F. Optimization design of steering law and parameters for variable-speed control moment gyroscopes with pyramid configuration[D]. Harbin: Harbin Institute of Technology, 2018: 18-20(in Chinese). [13] 李传江, 郭延宁, 马广富. 单框架控制力矩陀螺的奇异分析及操纵律设计[J]. 宇航学报, 2010, 31(10): 2346-2353. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201010020.htmLI C J, GUO Y N, MA G F. Singularity analysis and steering law design for single-gimbal control moment gyroscopes[J]. Journal of Astronautics, 2010, 31(10): 2346-2353(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201010020.htm [14] 侯二永. 磁悬浮控制力矩陀螺结构设计与动力学分析[D]. 长沙: 国防科学技术大学, 2013: 27-28.HOU E Y. Structure design and dynamics analysis of magnetically suspended control moment gyroscope[D]. Changsha: National University of Defense Technology, 2013: 27-28(in Chinese). [15] 宁欣, 韩邦成, 房建成. 基于干扰观测器的双框架变速率控制力矩陀螺解耦控制[J]. 机械工程学报, 2017, 53(10): 52-59. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201710007.htmNING X, HAN B C, FANG J C. Disturbance observer based decoupling method of double-gimbaled variable speed control moment gyroscope[J]. Journal of Mechanical Engineering, 2017, 53(10): 52-59(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201710007.htm [16] 魏孔明, 吴忠, 刘涛. 单框架控制力矩陀螺构型分析与奇异可视化[J]. 中国空间科学技术, 2013, 33(1): 21-29. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201301003.htmWEI K M, WU Z, LIU T. Configuration analysis and singularity visualization of single gimbal control moment gyroscopes[J]. Chinese Space Science and Technology, 2013, 33(1): 21-29 (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201301003.htm [17] 焉宁. 敏捷机动小卫星姿态控制方法的仿真与实验研究[D]. 北京: 北京航空航天大学, 2011: 27-28.YAN N. Research on the simulation and experiment of attitude control method for agile small satellite[D]. Beijing: Beihang University, 2011: 27-28(in Chinese). [18] 徐春雷. 飞轮调速系统驱动及控制实现[D]. 哈尔滨: 哈尔滨工业大学, 2012: 3-4.XU C L. The implementation of the drive and control of variable speed flywheel system[D]. Harbin: Harbin Institute of Techno-logy, 2012: 3-4(in Chinese). [19] 鲍国亮. 陀螺飞轮实现航天器姿态测量与控制的机理分析[D]. 哈尔滨: 哈尔滨工业大学, 2013: 18-21.BAO G L. Research on the measurement and control of the attitude of the spacecraft by gyrowheel[D]. Harbin: Harbin Institute of Technology, 2013: 18-21(in Chinese). [20] XIA C F, CAI Y W, REN Y. Steering law design for a magnetically suspended control and sensitive gyro cluster considering rotor tilt saturation[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(11): 4066-4076. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 407
- HTML全文浏览量: 128
- PDF下载量: 28
- 被引次数: 0
