



A parameter calibration method for manipulators based on laser displacement measurement
-
摘要:
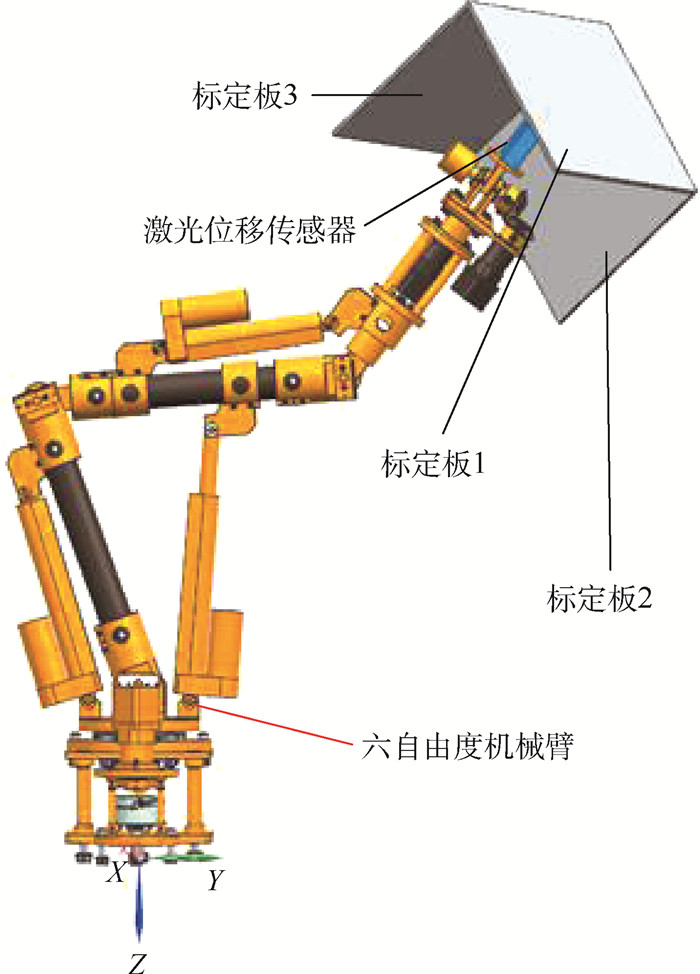
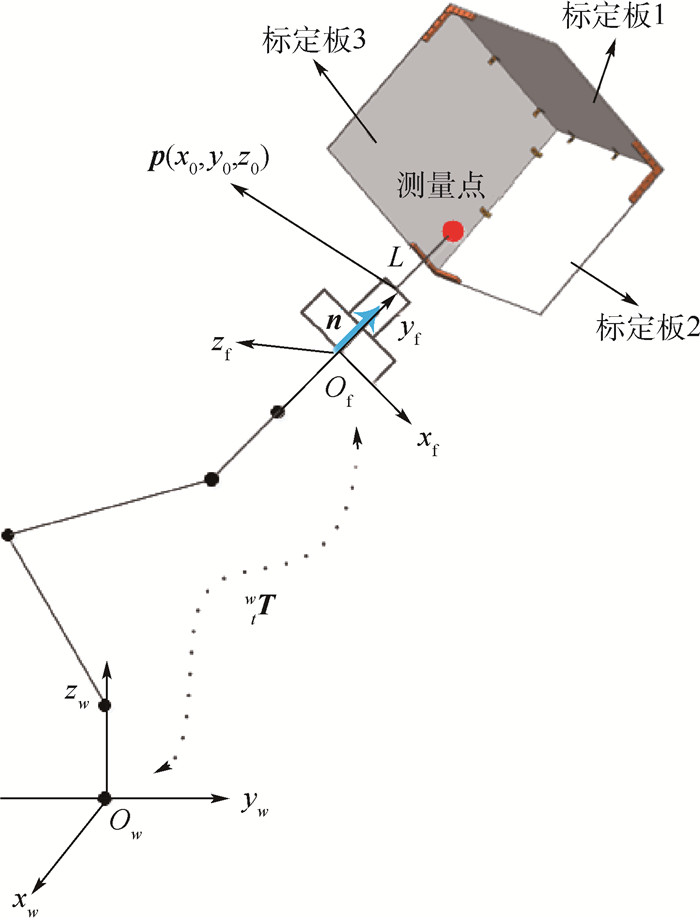
针对传统机器人参数标定方法, 通常依赖昂贵设备, 技术实现成本高的问题, 提出一种新型低成本的基于激光位移测量的机器人标定系统, 利用安装于机械臂末端的激光位移计进行与外部参照物立方体的相对位置测量, 并设计实现了六自由度机械臂的运动学参数标定方法。基于单维度位移测量值, 采用平面度约束与平面角度约束共同构建误差函数, 并利用非线性优化方法求得最终的标定结果。在实验系统上进行标定方法的验证, 并与利用激光追踪仪标定的实验结果进行对比。实验数据表明:所提方法在操作简便、成本低廉的同时, 能够获得与使用昂贵的外部测量仪器近似的标定效果。
Abstract:The traditional method of robot parameter target usually requires an expensive equipment, and the technical realization cost is high, a novel low-cost calibration method for manipulators is proposed, which utilizes a laser displacement sensor installed on the end of the manipulator to measure the relative position of the manipulator end with respect to an external cubic reference. A kinematic parameter calibration is designed for a 6 degree of freedom manipulator. Based on single-dimensional measurements, the error function is constructed with combined consideration of plane flatness and plane angles, and further minimized with a nonlinear optimization method to obtain the final calibration results. The proposed method is testified on an experimental system and compared with the calibration by a laser tracker. Results show that this method has similar calibration accuracy to the methods using expensive external measurement devices and provides a handy and cheap solution to manipulator calibration.
-

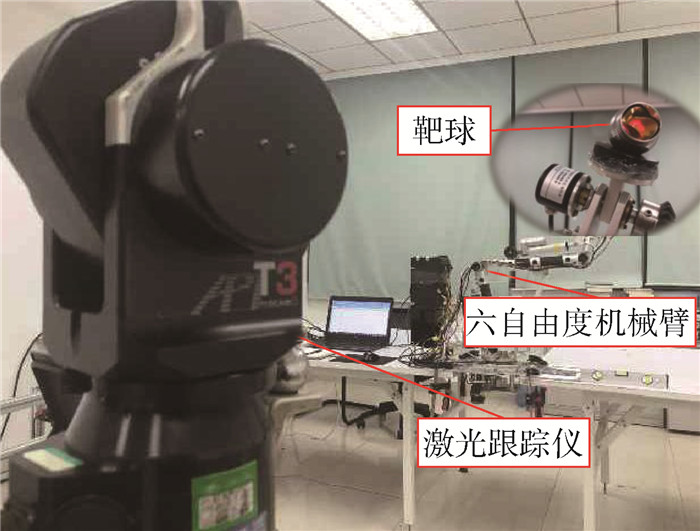
图 4 激光位移传感器标定实验场景
Figure 4. Experimental scene of laser displacement sensor calibration

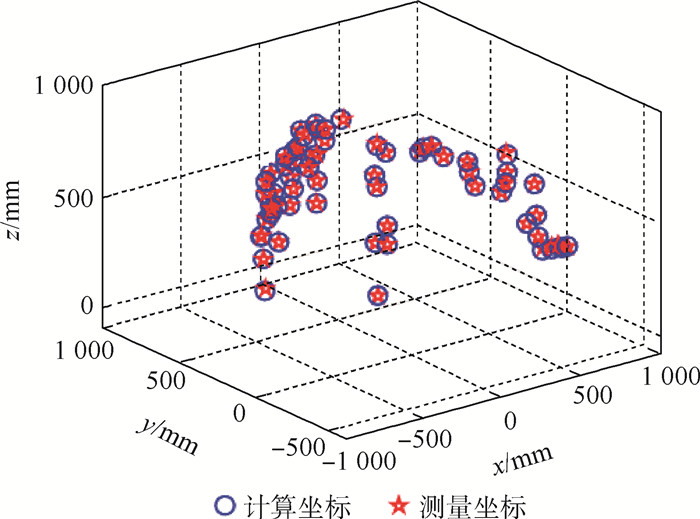
图 8 基于跟踪仪标定后计算坐标和测量坐标对比
Figure 8. Comparison of calculated coordinates and measurement coordinates after tracker-based calibration
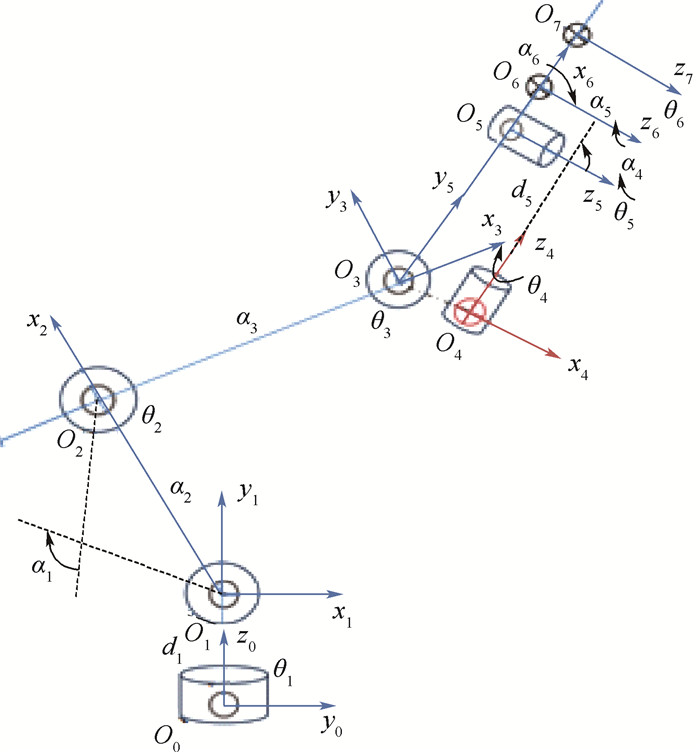
表 1 DH参数
Table 1. DH parameters
关节i 连杆长度ai/mm 连杆偏角αi/(°) 连杆距离di/mm 连杆夹角θi/(°) 1 0 90 184 θ1 2 372 0 0 θ2 3 382 0 0 θ3 4 0 -90 0 θ4 5 0 -90 280.4 θ5 6 36 0 0 θ6  下载: 导出CSV
下载: 导出CSV
表 2 DH误差参数
Table 2. DH parameters with kinematic errors
关节i 连杆长度ai/mm 连杆偏角αi/(°) 连杆距离di/mm 连杆夹角θi/(°) 1 Δa1 90+Δα1 184+Δd1 θ1+Δθ1 2 372+Δa2 Δα2 Δd2 θ2+Δθ2 3 382+Δa3 Δα3 Δd3 θ3+Δθ3 4 Δa4 -90+Δα4 Δd4 θ4+Δθ4 5 Δa5 -90+Δα5 280.4+Δd5 θ5+Δθ5 6 36+Δa6 Δα6 Δd6 θ6+Δθ6
下载: 导出CSV
表 3 权重μ取值
Table 3. Values of weight μ
μ e1/mm e2/(°) 0.01 1.04×10-5 67.04 0.02 0.009 9 13.41 0.07 1.08 0.67 0.71 1.2 0.034
下载: 导出CSV
表 4 DH参数变化值
Table 4. Values of DH parameter change
关节i Δai/mm Δαi/(°) Δdi/mm Δθi/(°) 粗标定 精标定 粗标定 精标定 粗标定 精标定 粗标定 精标定 1 -0.19 0.92 -4.52 0.45 -4.40 0.94 -3.35 -0.89 2 3.09 0.29 5.92 0.04 -2.41 0.92 -1.99 0 3 0.16 0.19 3.59 0.89 -2.46 0.59 -0.79 0.04 4 -10.24 0.07 1.78 0.62 -2.57 0.4 3.142 3 0.78 5 5.84 0.51 -2.56 0.06 -19.35 0 -2.11 0.4 6 0.95 0.18 5.13 0.33 1.35 0.05 -1.73 0.26
下载: 导出CSV
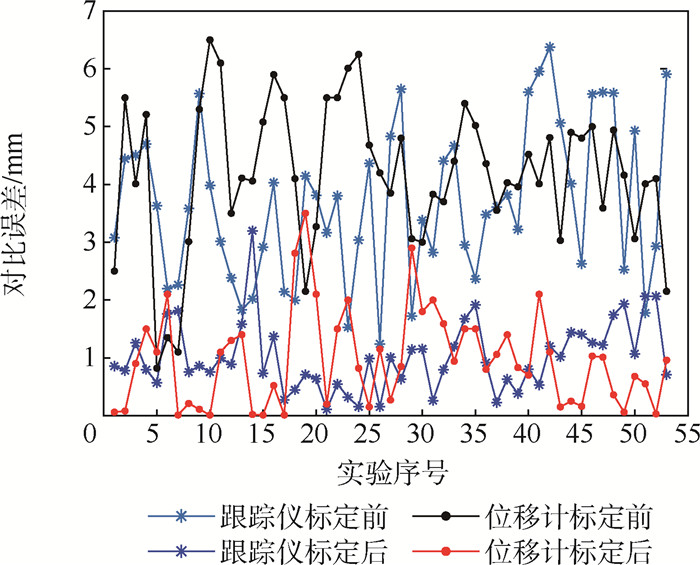
表 5 标定实验误差值对比
Table 5. Comparison of error values of calibration experiment
实验类别 误差平均值/mm 最大值/ mm 最小值/ mm 方差/ mm2 跟踪仪标定前 3.67 6.37 1.24 1.34 跟踪仪标定后 1.01 3.19 0.11 0.36 位移计标定前 3.82 6.52 0.82 1.27 位移计标定后 1.08 3.45 0.01 0.39
下载: 导出CSV
-
[1] 高涵, 张明路, 张小俊, 等. 基于最优测量结构选择的机械臂参数标定[J]. 仪器仪表学报, 2018, 39(9): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201809001.htmGAO H, ZHANG M L, ZHANG X J, et al. Manipulator parameter calibration based on optimal measurement structure selection[J]. Chinese Journal of Scientific Instrument, 2018, 39(9): 1-9(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201809001.htm [2] GATTI G, DANIELI G. A practical approach to compensate for geometric errors in measuring arms: Application to a six-degree-of-freedom kinematic struct-ure[J]. Measurement Science and Technology, 2007, 19(1): 015107. [3] 陈启军, 周自强, 刘成菊, 等. 基于视觉的六自由度机械臂运动学参数辨识[J]. 同济大学学报(自然科学版), 2020, 48(7): 1023-1029. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202007012.htmCHEN Q J, ZHOU Z Q, LIU C J, et al. Kinematics parameter identification of six-degree-of-freedom manipulator based on vision[J]. Journal of Tongji University (Natural Science Edition), 2020, 48(7): 1023-1029(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202007012.htm [4] 谭月胜, 孙汉旭, 贾庆轩, 等. 基于旋量理论及距离误差的机械臂标定新方法[J]. 北京航空航天大学学报, 2006, 32(9): 1104-1108. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200609024.htmTAN Y S, SUN H X, JIA Q X, et al. New manipulator calibration method based on screw theory and distance error[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(9): 1104-1108(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200609024.htm [5] HE J, DING Q, GAO F, et al. Kinematic calibration methodology of hybrid manipulator containing parallel topology with main limb[J]. Measurement, 2019, 152: 107334. [6] 张铁, 戴孝亮, 杜亮. 基于距离测量的机器人误差标定及参数选定[J]. 北京航空航天大学学报, 2014, 40(5): 585-590. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201405002.htmZHANG T, DAI X L, DU L. Robot error calibration based on distance measurement with parameter selection[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(5): 585-590(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201405002.htm [7] HE S, MA L, YAN C, et al. Multiple location constraints based industrial robot kinematic parameter calibration and accuracy assessment[J]. International Journal of Advanced Manufacturing Technology, 2019, 102(5): 1037-1050. [8] DU G L, ZHANG P. IMU-based online kinematic calibration of robot manipulator[J]. The Scientific World Journal, 2013, 2013: 139738. [9] 陈宵燕, 张秋菊, 孙沂琳. 串联机器人多模式标定与刚柔耦合误差补偿方法研究[J]. 农业机械学报, 2019, 50(3): 396-403. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201903045.htmCHEN X Y, ZHANG Q J, SUN Y L. Multi-mode calibration and rigid-flexible coupling error compensation method of serial robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 396-403(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201903045.htm [10] 朱齐丹, 谢心如, 夏桂华, 等. 基于光轴约束的机械臂运动学标定方法[J]. 哈尔滨工程大学学报, 2019, 40(3): 433-439. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201903001.htmZHU Q D, XIE X R, XIA G H, et al. Kinematics calibration method of mechanical arm based on optical axis constraint[J]. Journal of Harbin Engineering University, 2019, 40(3): 433-439(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201903001.htm [11] YANG P, GUO Z, KONG Y. Plane kinematic calibration method for industrial robot based on dynamic measurement of double ball bar[J]. Precision Engineering, 2020, 62: 265-272. [12] 李永泉, 王皓辰, 张阳, 等. 一种基于手眼视觉的并联机器人标定方法[J]. 中国机械工程, 2020, 31(6): 722-730. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202006014.htmLI Y Q, WANG H C, ZHANG Y, et al. A calibration method of parallel robot based on hand eye vision[J]. China Mechanical Engineering, 2020, 31(6): 722-730(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202006014.htm [13] PARK I W, LEE B J, CHO S H, et al. Laser-based kinematic calibration of robot manipulator using differential kinematics[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6): 1059-1067. [14] JOUBAIR A, BONEV I A. Kinematic calibration of a six-axis serial robot using distance and sphere constraints[J]. International Journal of Advanced Manufacturing Technology, 2015, 77(1-4): 515-523. [15] JOUBAIR A, BONEV I A. Non-kinematic calibration of a six-axis serial robot using planar constraints[J]. Precision Engineering, 2015, 40(1): 325-333. [16] 吴孟桦, 胡晓兵, 赵清祥, 等. 基于双结构光视觉的机器人运动学参数标定方法[J]. 组合机床与自动化加工技术, 2020(6): 37-40. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC202006009.htmWU M H, HU X B, ZHAO Q X, et al. Robot kinematics parameter calibration method based on dual structured light vision[J]. Modular Machine Tool and Automatic Manufacturing Technology, 2020(6): 37-40(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC202006009.htm [17] SLOCUM K, HAYES M J D, LEITNER M, et al. Kinematic calibration of six-axis robots[C]//Proceedings of the CSME Forum 2002, 2002: 149-152. [18] HADGE H, BIDAUD P, JARDIN N. Practical consideration on the identification of the kinematic parameters of the Staubli TX90 robot[C]//13th World Congress in Mechanism and Machine Science, 2011: 43. [19] 杨源, 曹彤, 刘达. 一种利用标定板的机械臂DH参数标定方法[J]. 机械传动, 2017, 41(6): 187-190. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201706035.htmYANG Y, CAO T, LIU D. A DH parameter calibration method of a manipulator using a calibration plate[J]. Mechanical Transmission, 2017, 41(6): 187-190(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201706035.htm [20] COLSON J C, PERREIRA N D. Kinematic arrangements used in industrial robots[C]//Proceedings of the 13th International Symposium on Industrial Robots, 1983: 540-544. [21] UGRAY Z, LASDON L, PLUMMER J, et al. Scatter search and local NLP solvers: A multistart framework for global optimization[J]. Informs Journal on Computing, 2007, 19(3): 328-340. [22] 任永杰, 邾继贵, 杨学友, 等. 利用激光跟踪仪对机器人进行标定的方法[J]. 机械工程学报, 2007, 43(9): 195-200. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200709040.htmREN Y J, CHU J G, YANG X Y, et al. Method of calibrating robot using laser tracker[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 195-200(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200709040.htm [23] 董慧颖, 李文广. 一种基于平面精度的机器人标定方法及仿真[J]. 中国机械工程, 2011, 22(17): 2039-2042. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201117005.htmDONG H Y, LI W G. A robot calibration method and simulation based on plane accuracy[J]. China Mechanical Engineering, 2011, 22(17): 2039-2042(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201117005.htm -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 515
- HTML全文浏览量: 79
- PDF下载量: 66
- 被引次数: 0
