



-
摘要:
移动机器人所处的环境通常是动态的, 机器人需要及时做出响应, 同时保证路径的平滑度及与障碍物间的安全距离。针对此问题, 提出了一种基于障碍物代价势场的移动机器人动态避障算法。通过建立静态栅格地图及障碍物的代价势场, 获得动态场景下的等势线及经过起点、终点的切线, 求解最小生成树获得初始候选路径, 针对路径的长度、障碍物距离及平滑度对候选路径锚点进行调整。通过引入障碍物速度对代价势场的影响, 使得机器人能对移动中的障碍物做出及时的响应。为验证所提算法的有效性, 在分辨率为1 200×1 000 m的栅格场景下分别对静态场景和动态场景进行仿真, 结果表明:所提算法能够在保证路径具有较高的平滑度且与障碍物间保持安全距离的条件下使路径尽可能得短;同时在动态障碍物场景下依然能保持路径的平滑和避障的安全性, 满足动态场景下移动机器人路径规划的要求。
Abstract:A mobile robot operates in a dynamic environment, so it must react quickly, maintain a clear path, and keep a safe distance from obstacles. To solve this problem, this paper proposes a dynamic obstacle avoidance method for mobile robots based on the obstacle cost potential field. By establishing a static grid map and the obstacle cost potential field, the equipotential lines in the dynamic scene and the tangents passing through the start to end points are obtained. Then the initial candidate path is obtained by the minimum spanning tree. The candidate path anchor points for the length of the path, the distance from the obstacle and the smoothness are optimized. He candidate path anchor points are then optimized for the path's length, distance from the obstruction, and smoothness. By introducing the influence of obstacle speed on the cost potential field, the robot can respond to the moving obstacle in time. In order to verify the effectiveness of the algorithm, the static scene and the dynamic scene are simulated separately in a grid scene with a resolution of 1 200×1 000 m. The results show that the algorithm in this paper can ensure that the path has a high degree of smoothness and maintain safety between obstacles. Moreover, it makes the path as short as possible under the condition of distance. At the same time, it can still maintain the smoothness of the path and the safety of obstacle avoidance in the dynamic obstacle scene, which can meet the requirements of mobile robot path planning in the dynamic scene.
-
Key words:
- mobile robot /
- path planning /
- cost potential field /
- dynamic obstacle /
- obstacle avoidance
-

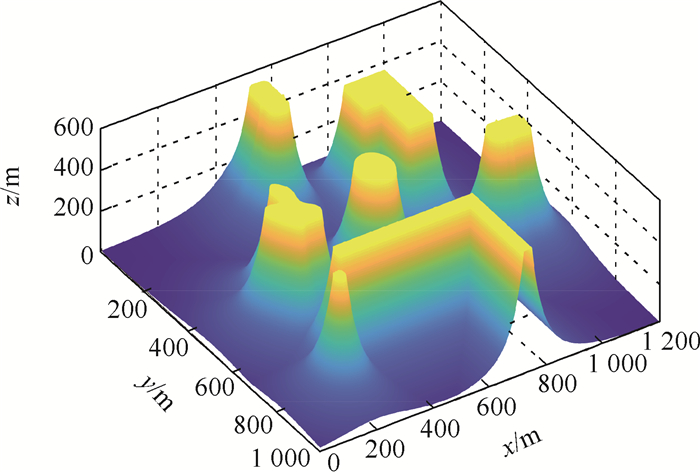
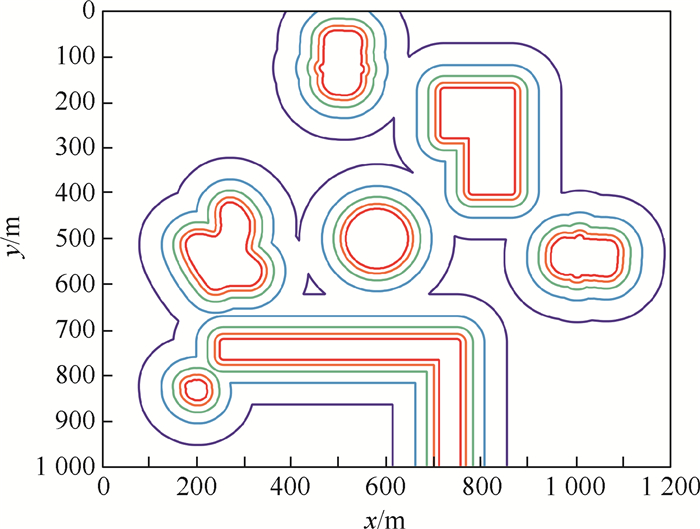
图 2 障碍物附近的代价势场栅格示意图
Figure 2. Schematic diagram of cost potential field grid near obstacle

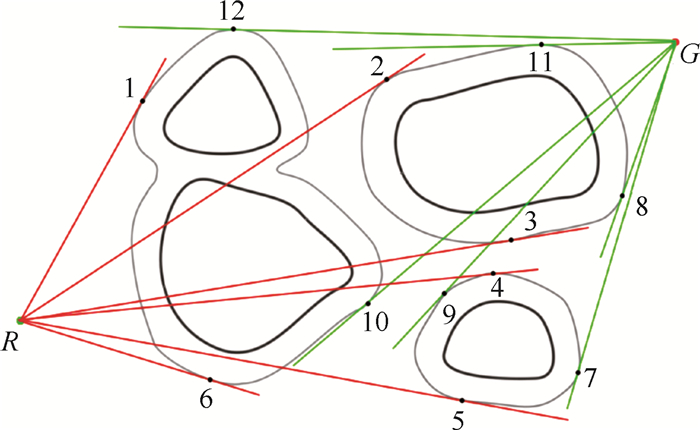
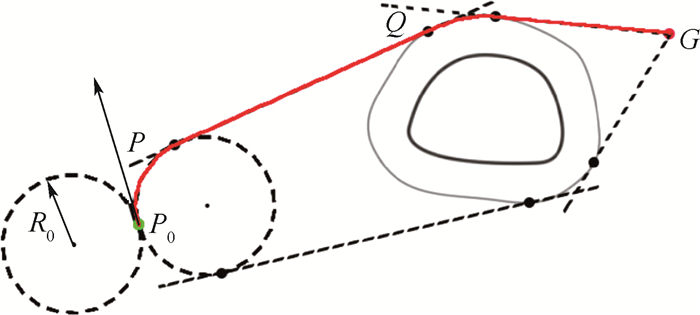
图 3 基于代价势场计算切线及等势曲线长度
Figure 3. Calculate tangent and equipotential curve length based on cost potential field

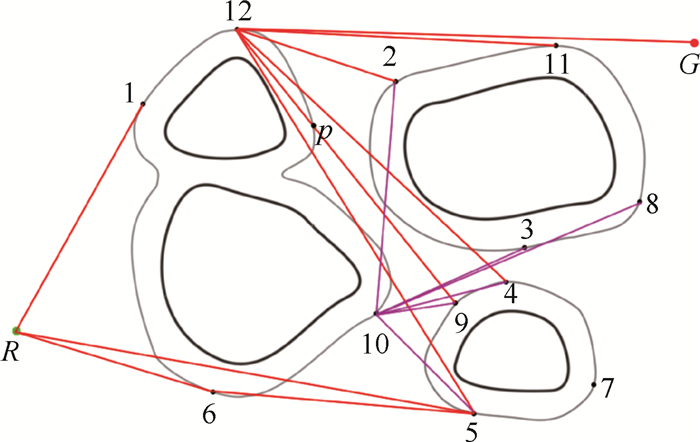
图 5 基于等势曲线切点生成的部分连接代价
Figure 5. Partial connection cost generated based on equipotential curve tangent points

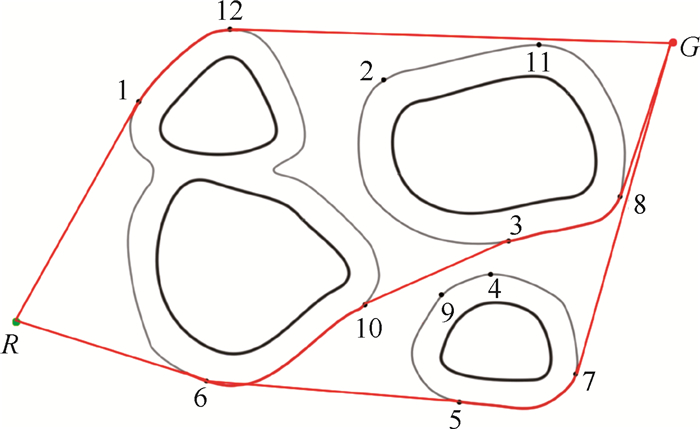
图 6 由最小生成树得到的3条代价较小的初始路径
Figure 6. 3 initial paths with lower cost obtained from the minimum spanning tree

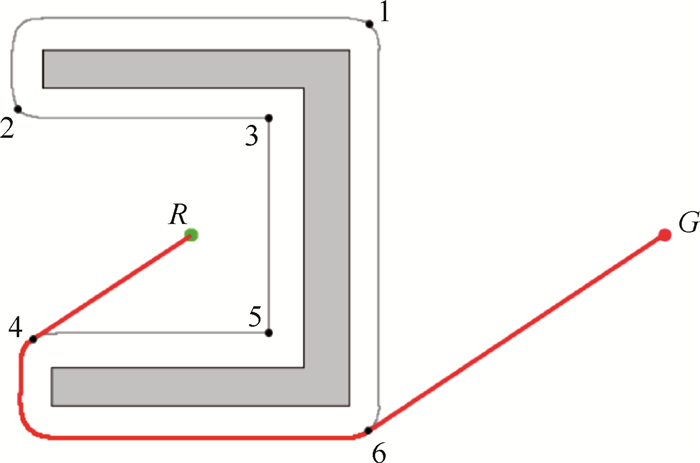
图 7 U型障碍物中候选路径生成示意图
Figure 7. Schematic diagram of candidate path generation in U-shaped obstacle

图 8 初试姿态及最小转向半径约束下的初始路径
Figure 8. Initial path under constraints of initial attitude and the minimum turning radius

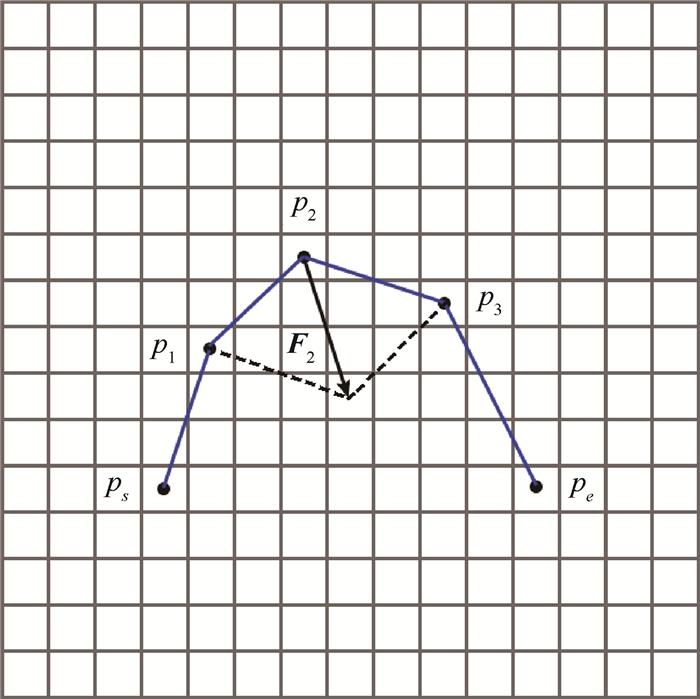
图 10 候选路径中锚点p2所受合力F2
Figure 10. Resultant force F2 on anchor point p2 in candidate path

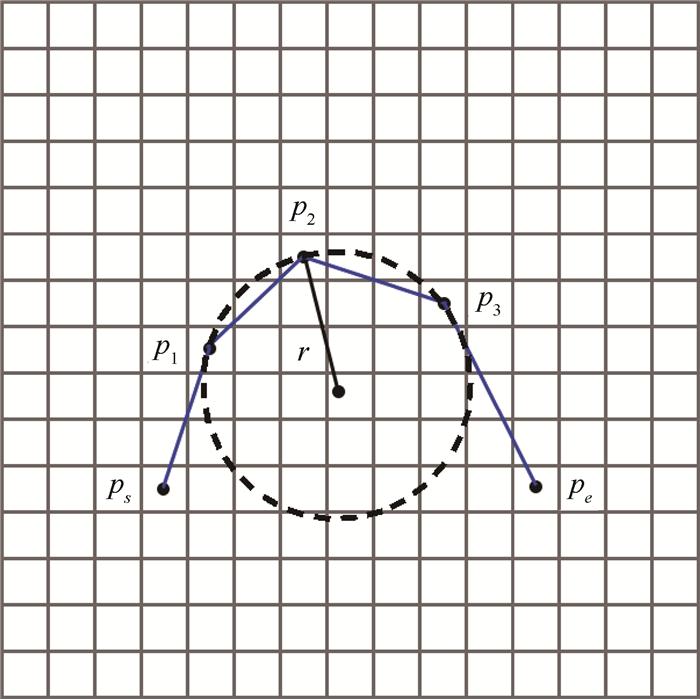
图 11 锚点p2对应的曲率圆半径
Figure 11. Radius of circle of curvature corresponding to anchor point p2

图 14 静态障碍物场景中本文算法避障效果
Figure 14. Obstacle avoidance effect of the proposed method in static obstacle scene

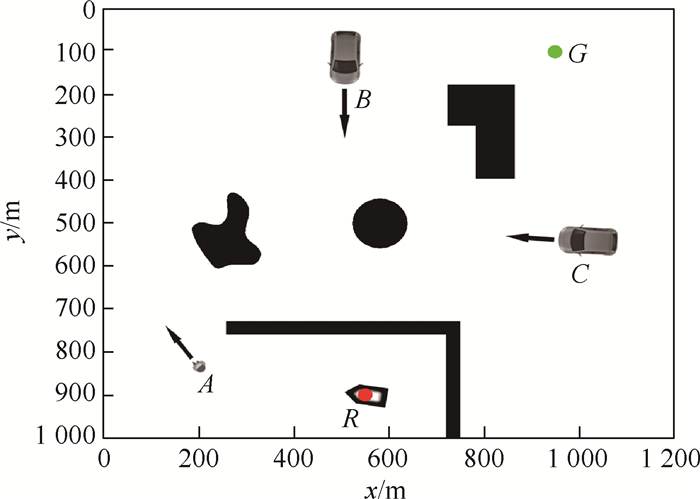
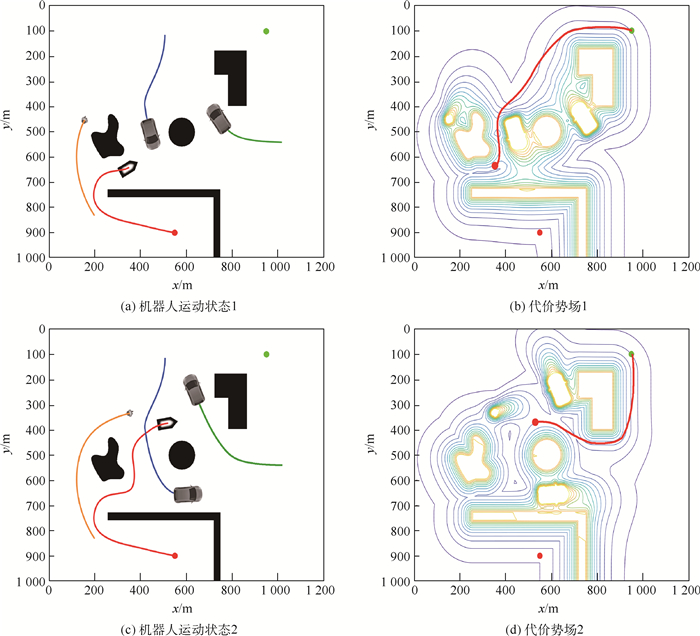
图 16 动态场景中机器人实时避障路径
Figure 16. Real-time obstacle avoidance path of robots in dynamic scenarios

图 17 机器人与动态障碍物交互过程中的运动轨迹
Figure 17. Movement trajectory during interaction between robot and dynamic obstacles

图 18 机器人距离障碍物A、B、C及目标点的实时距离
Figure 18. Real-time distance of robot from obstacles A, B, C and target point

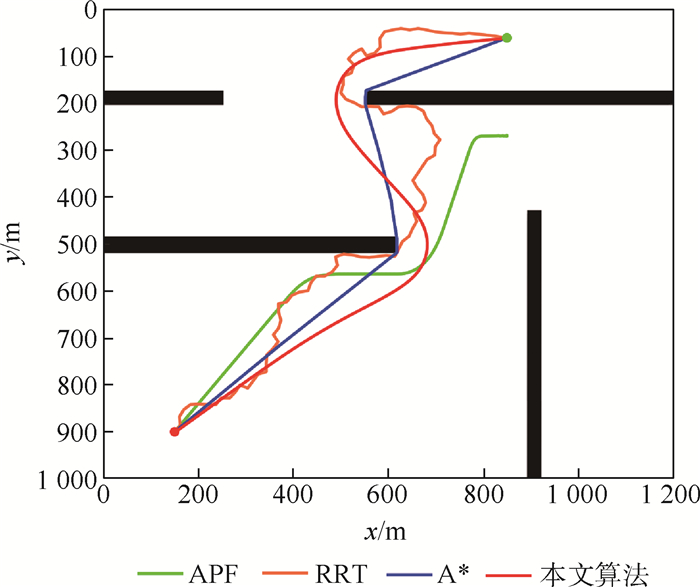
图 19 场景1中不同算法的路径规划结果对比
Figure 19. Comparison of path planning results of different methods in Scenario 1

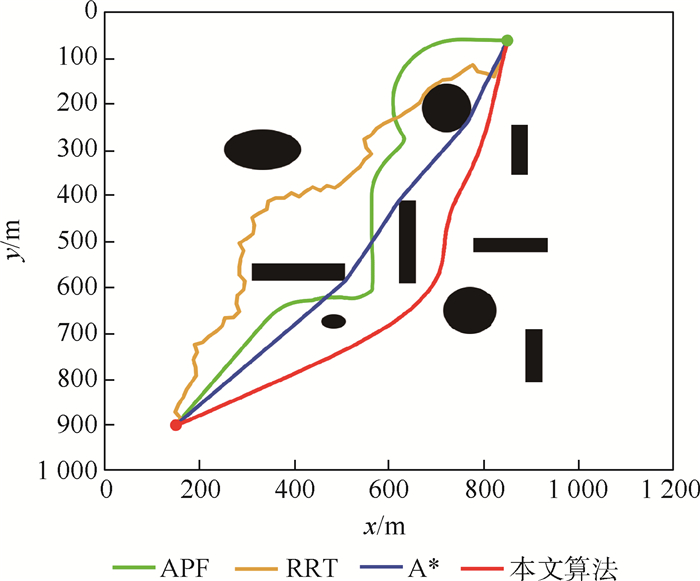
图 20 场景2中不同算法的路径规划结果对比
Figure 20. Comparison of path planning results of different methods in Scenario 1

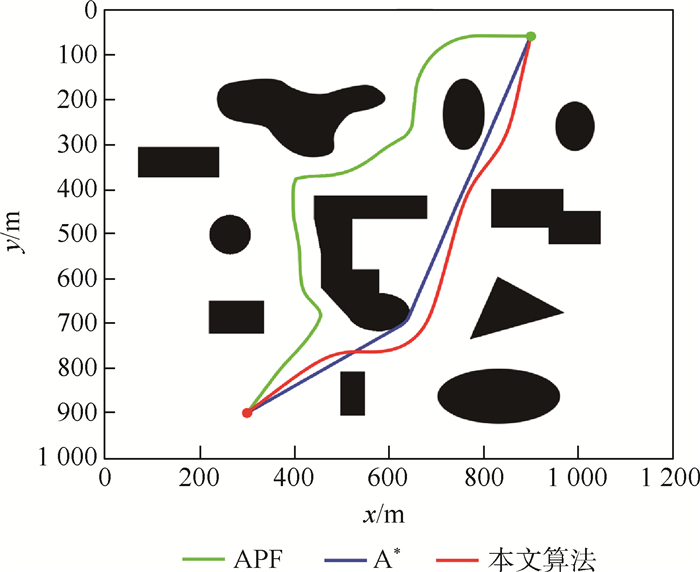
图 21 复杂场景下的避障结果对比
Figure 21. Comparison of obstacle avoidance results in complex scenarios

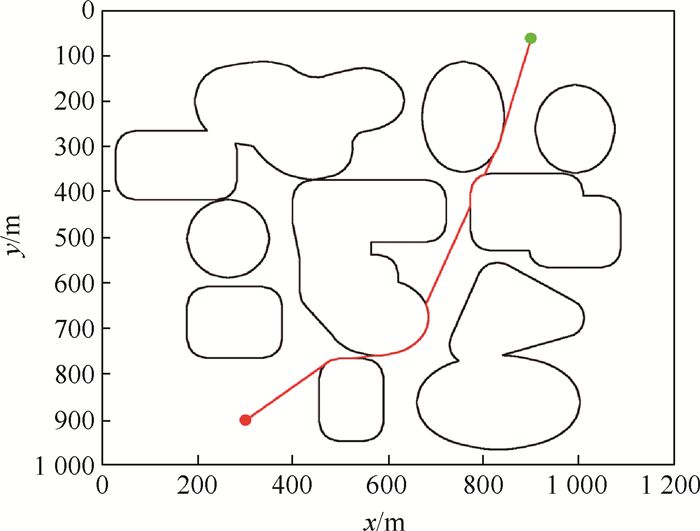
图 22 基于等势曲线生成的初始候选路径
Figure 22. Initial candidate path generated based on equipotential curve
表 1 场景1中不同算法路径代价指标的10次平均值对比
Table 1. Ten mean comparison of path cost indexes of different methods in Scenario 1
评价指标 APF RRT* A* 本文算法 算法耗时/s 0.114 1.794 4.475 1.645 长度代价 17.98 23.02 16.72 19.24 障碍物代价 14.03 18.66 19.43 11.06 加权代价 15.61 20.41 18.35 14.33 地图遍历率/% 0.18 1.64 9.34 2.64  下载: 导出CSV
下载: 导出CSV
表 2 场景2中不同算法路径代价指标的10次平均值对比
Table 2. Ten mean comparison of path cost indexes of different methods in Scenario 2
评价指标 APF RRT* A* 本文算法 算法耗时/s 0.110 1.125 1.210 1.636 长度代价 18.63 17.93 14.40 15.73 障碍物代价 15.35 21.61 20.49 13.86 加权代价 16.67 20.14 18.05 14.61 地图遍历率/% 0.21 1.03 2.12 2.53
下载: 导出CSV
表 3 场景2中不同算法路径代价方差对比
Table 3. Variance comparison of path costs of different methods in Scenario 2
评价指标 APF RRT* A* 本文算法 耗时方差 2.16×10-5 5.28×10-3 4.47×10-5 2.246×10-5 长度方差 0 1.01 0 0 代价方差 0 3.66 0 0
下载: 导出CSV
表 4 不同算法评价指标的10次平均值对比
Table 4. Ten average comparison of cost indexes of different methods
评价指标 APF A* 本文算法 加权路径代价 15.71 17.36 12.64 全局平滑指标 2.13 1.26 1.72 局部平滑指标 8.48 1.47 1.51 障碍物最小距离 36.22 1.41 31.51
下载: 导出CSV
-
[1] PANDEY A, PANDEY S, PARHI D R. Mobile robot navigation and obstacle avoidance techniques: A review[J]. International Robotics & Automation Journal, 2017, 2(3): 96-105. [2] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: An efficient alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Piscataway: IEEE Press, 2011: 6-13. [3] HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: An efficient probabilistic 3D mapping framework based on octrees[J]. Autonomous Robots, 2013, 34(3): 189-206. doi: 10.1007/s10514-012-9321-0 [4] YANG L, QI J, SONG D, et al. Survey of robot 3D path planning algorithms[J]. Journal of Control Science and Engineering, 2016, 2016: 1-22. [5] 王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htmWANG H B, YIN P H, ZHENG W, et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42(3): 346-353(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htm [6] ZAFAR M N, MOHANTA J C. Methodology for path planning and optimization of mobile robots: A review[J]. Procedia Computer Science, 2018, 133: 141-152. doi: 10.1016/j.procs.2018.07.018 [7] 赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htmZHAO X, WANG Z, HUANG C K, et al. Mobile robot path planning based on an improved A* algorithm[J]. Robot, 2018, 40(6): 903-910(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htm [8] LIU J, YANG J, LIU H, et al. An improved ant colony algorithm for robot path planning[J]. Soft Computing, 2017, 21(19): 5829-5839. doi: 10.1007/s00500-016-2161-7 [9] 林依凡, 陈彦杰, 何炳蔚, 等. 无碰撞检测RRT*的移动机器人运动规划方法[J]. 仪器仪表学报, 2020, 41(10): 257-267. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202010028.htmLIN Y F, CHEN Y J, HE B W, et al. Non-collision checking RRT* algorithm for mobile robot motion planning[J]. Chinese Journal of Scientific Instrument, 2020, 41(10): 257-267(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202010028.htm [10] 薛学华, 冯辉, 徐海祥, 等. 基于改进人工势场法的USV全局路径规划[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(6): 978-983. doi: 10.3963/j.issn.2095-3844.2020.06.007XUE X H, FENG H, XU H X, et al. Global path planning of USV base on improved artifical potential field method[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(6): 978-983(in Chinese). doi: 10.3963/j.issn.2095-3844.2020.06.007 [11] THRUN S. Learning occupancy grid maps with forward sensor models[J]. Autonomous Robots, 2003, 15(2): 111-127. doi: 10.1023/A:1025584807625 [12] SAVKIN A V, LI H. A safe area search and map building algorithm for a wheeled mobile robot in complex unknown cluttered environments[J]. Robotica, 2018, 36(1): 96. [13] KOREN Y, BORENSTEIN J. Potential field methods and their inherent limitations for mobile robot navigation[C]//IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 1991: 1398-1404. [14] KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. [15] HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. [16] YAO P, WANG H, SU Z. Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment[J]. Aerospace Science and Technology, 2015, 47: 269-279. -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 422
- HTML全文浏览量: 216
- PDF下载量: 59
- 被引次数: 0
