



-
摘要:
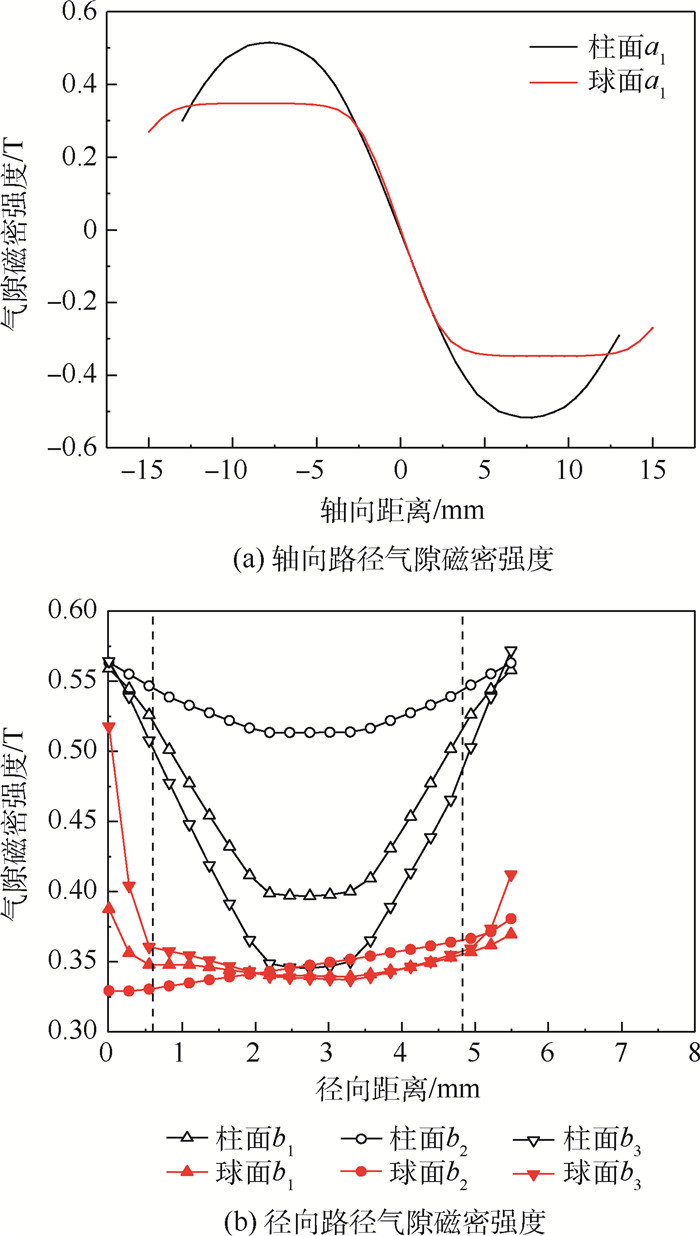
针对柱面洛伦兹力磁轴承(LFMB)偏角有限导致磁悬浮控制敏感陀螺(MSCSG)力矩输出持续时间短和气隙磁密均匀度低影响控制敏感精度的突出问题, 提出了一种高精度球面LFMB设计与分析方法。所设计的LFMB转子球面导磁套和定子球面绕组均与双球面陀螺转子同球心, 气隙呈球壳状, 保证转子偏转时定子绕组两侧气隙宽度不变, 相较于柱面LFMB, 转子可偏转角度由±0.6°扩大到±2°。利用等效磁路法推导了柱面与球面LFMB气隙磁密的数学解析模型, 并基于ANSYS命令流构建了柱面与球面LFMB的有限元仿真模型。仿真结果表明:在转子可偏转范围内, 沿偏转中心线, 球面LFMB最大磁密较柱面下降了34.1%;当转子不偏转时, 球面LFMB绕组截面内的磁密均匀度较柱面提高了11.6%;当转子偏转时, 球面LFMB绕组截面内的磁密均匀度较柱面提高了17.7%。所提方法为磁悬浮控制敏感陀螺控制与敏感性能的提升奠定了基础。
Abstract:Aim at solving following problems. Firstly, the limited deflection angle of the cylindrical Lorentz force magnetic bearing (LFMB) can leads to the short duration of torque output of magnetically suspended control and sensing gyroscope (MSCSG). Secondly, the low uniformity of magnetic density between the LFMB's air gap will also affect the control sensitivity of the MSCSG. A high-precision spherical design and analysis of LFMB are proposed. The spherical LFMB's rotor spherical magnetic sleeve and stator spherical winding are both concentric with the double spherical gyroscope rotor, and the air gap is spherical shell shape, which ensures that the width of the air gap on both sides of the winding coil remains unchanged during deflection. Compared to the cylindrical LFMB, the deflection angle of the spherical LFMB is increased from ±0.6° to ±2°. The mathematical analysis model of the air gap magnetic density of the cylindrical and spherical LFMB is derived by the equivalent magnetic circuit method, and the finite element simulation model of the cylindrical and spherical LFMB is constructed based on the ANSYS command stream. The simulation analysis shows that the maximum magnetic density of the spherical LFMB decreases by 34.1% compared to the cylindrical LFMB within the deflection range of the rotor along the deflection centerline. When the rotor is not deflected, the uniformity of the magnetic density at the cross-section of the spherical LFMB coil increases by 11.6% compared to the cylindrical. When the rotor is deflected, the uniformity of the magnetic density at the cross-section of the spherical LFMB coil increases by 17.7% compared to the cylindrical. The proposed method lays the foundation for the improvement of the control and sensitivity of the magnetically suspended control and sensing gyroscope.
-

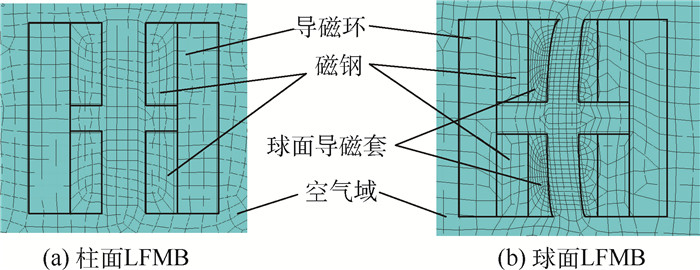
图 7 两种LFMB磁密分布云图及路径
Figure 7. Magnetic density distribution nephogram and paths of two LFMBs

图 9 两种LFMB绕组截面偏转示意图
Figure 9. Schematic diagram of coil-section deflection of two LFMBs
表 1 两种LFMB主要参数
Table 1. Main design parameters of two LFMBs
参数 柱面LFMB 球面LFMB 内永磁体内径/mm 119.4 119.4 内永磁体外径/mm 127.4 127.4 内球面导磁套外径/mm 138.2 136 外永磁体内径/mm 152 外永磁体外径/mm 146.2 160 外球面导磁套内径/mm 146.8 磁钢轴向高度/mm 11 13 上下永磁体间轴向距离/mm 4 4 绕组轴向高度/mm 8.5 8.5 设计偏转角度/(°) ±0.6 ±2 极限偏转角度/(°) 0.8 2.5 单个绕组沿周向张角/(°) 84 84  下载: 导出CSV
下载: 导出CSV
表 2 两种LFMB绕组截面范围内磁密均匀度的对比
Table 2. Comparison of magnetic density uniformity within coil section of two LFMBs
偏转角度/(°) 磁密均匀度 柱面LFMB 球面LFMB 0 0.882 0.984 0.6 0.834 0.982 2 0.912
下载: 导出CSV
-
[1] BITTERLY J G. Flywheel technology: Past, present, and 21st century projections[J]. IEEE Aerospace and Electronic Systems Magazine, 1998, 13(8): 13-16. doi: 10.1109/62.707557 [2] CHRISTOPHER D A, BEACH R. Flywheel technology development program for aerospace applications[J]. IEEE Aerospace and Electronic Systems Magazine, 1998, 13(6): 9-14. doi: 10.1109/62.683723 [3] 林士谔. 动力调谐陀螺仪[M]. 北京: 国防工业出版社, 1983: 25-32.LIN S E. Dynamically tuned gyroscopes[M]. Beijing: National Defense Industry Press, 1983: 25-32(in Chinese). [4] PENNÉ B, TOBEHN C, KASSEBOM M, et al. A high agile satellite platform for Earth observation-performance description using new generation missions[C]//57th International Astronautical Congress. Reston: AIAA, 2006. [5] KURITA N, ISHIKAWA T, MATSUNAMI M. Basic design and dynamic analysis of the small-sized flywheel energy storage system-application of Lorentz force type magnetic bearing[C]//2009 International Conference on Electrical Machines and Systems. Piscataway: IEEE Press, 2010: 1-6. [6] TANG J Q, XIANG B, WANG C E. Rotor's suspension for vernier-gimballing magnetically suspended flywheel with conical magnetic bearing[J]. ISA Transactions, 2015, 58: 509-519. doi: 10.1016/j.isatra.2015.05.011 [7] 任元, 王卫杰, 刘强, 等. 一种磁悬浮控制敏感陀螺: CN104613950B[P]. 2017-06-27.REN Y, WANG W J, LIU Q, et al. Magnetically suspended control and sensing gyroscope: CN104613950B[P]. 2017-06-27(in Chinese). [8] REN Y, CHEN X C, CAI Y W, et al. Attitude-rate measurement and control integration using magnetically suspended control and sensitive gyroscopes[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4921-4932. doi: 10.1109/TIE.2017.2772161 [9] 房建成, 任元. 磁悬浮控制力矩陀螺技术[M]. 北京: 国防工业出版社, 2014: 25-30.FANG J C, REN Y. Magnetically suspended control moment gyroscope technology[M]. Beijing: National Defense Industry Press, 2014: 25-30(in Chinese). [10] 房建成, 孙津济, 樊亚洪. 磁悬浮惯性动量轮技术[M]. 北京: 国防工业出版社, 2012: 58-65.FANG J C, SUN J J, FAN Y H. Magnetically suspended inertial momentum wheel technology[M]. Beijing: National Defense Industry Press, 2012: 58-65(in Chinese). [11] DOWNER J, JOHNSON B. Modelling and control of an annular momentum control device[R]. [S. l. ]: NASA Con-tractor Report, 1988: 23-29. [12] GERLACH B, EHINGER M, RAUE H K, et al. Gimballing magnetic bearing reaction wheel with digital controller[C]//11th European Space Mechanisms and Tribology Symposium, 2005: 21-23. [13] 夏长峰, 蔡远文, 任元, 等. MSCSG转子不平衡振动原理分析与建模[J]. 北京航空航天大学学报, 2018, 44(11): 2321-2328. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201811010.htmXIA C F, CAI Y W, REN Y, et al. Principle analysis and modeling of rotor imbalance vibration in magnetically suspended control and sensing gyroscope[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2321-2328(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201811010.htm [14] CHEN X C, CAI Y W, REN Y, et al. Spacecraft angular rates and angular acceleration estimation using single-gimbal magnetically suspended control moment gyros[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 440-450. doi: 10.1109/TIE.2018.2826468 [15] LIU Q, WANG K, REN Y, et al. Optimization design of launch locking protective device (LLPD) based on carbon fiber bracket for magnetically suspended flywheel (MSFW)[J]. Acta Astronautica, 2019, 154: 9-17. doi: 10.1016/j.actaastro.2018.10.044 [16] 辛朝军, 蔡远文, 任元, 等. 磁悬浮敏感陀螺动力学建模与关键误差源分析[J]. 北京航空航天大学学报, 2016, 42(10): 2048-2058. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201610005.htmXIN C J, CAI Y W, REN Y, et al. Dynamic modeling and key error sources analysis of magnetically suspended sensitive gyroscopes[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(10): 2048-2058(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201610005.htm [17] CHEN M, KNOSPE C R. Feedback linearization of active magnetic bearings: Current-mode implementation[J]. IEEE/ASME Transactions on Mechatronics, 2005, 10(6): 632-639. doi: 10.1109/TMECH.2005.859824 [18] XU G F, CAI Y W, REN Y, et al. Application of a new Lorentz force-type magnetic bearing in tilting control for magnetically suspended control & sensitive gyro-scope with cross sliding mode control[J]. Journal of Aerospace Technology and Management, 2017, 61(1): 107-109. [19] ZHAO Y, LIU Q, MA L M, et al. Novel Lorentz force-type magnetic bearing with flux congregating rings for magnetically suspended gyrowheel[J]. IEEE Transactions on Magnetics, 2019, 55(12): 1-8. [20] 许国锋, 蔡远文, 任元, 等. 洛伦兹力磁轴承磁密均匀度设计与分析[J]. 北京航空航天大学学报, 2017, 43(3): 559-566. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201703018.htmXU G F, CAI Y W, REN Y, et al. Design and analysis on uniformity of magnetic flux density in Lorentz force-type magnetic bearing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3): 559-566(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201703018.htm [21] 周一恒. 主被动结合磁悬浮隔振平台的基础研究[D]. 哈尔滨: 哈尔滨工业大学, 2019: 105-110.ZHOU Y H. Fundamental research on active and passive combined magnetic levitation vibration isolation platform[D]. Harbin: Harbin Institute of Technology, 2019: 105-110(in Chinese). -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 376
- HTML全文浏览量: 71
- PDF下载量: 16
- 被引次数: 0
