



-
摘要:
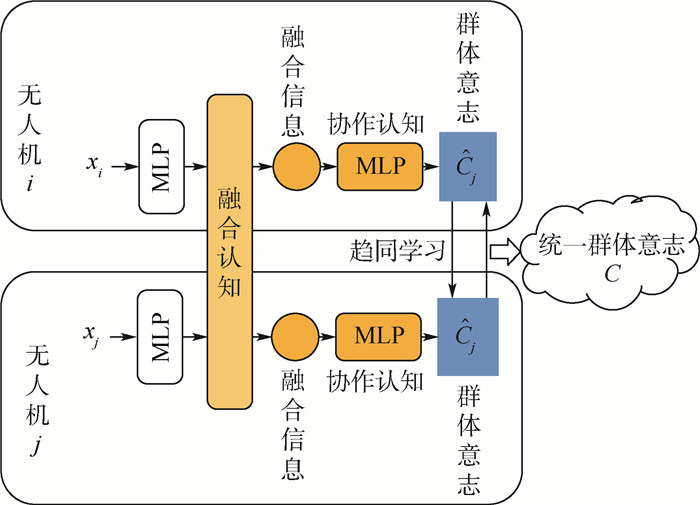
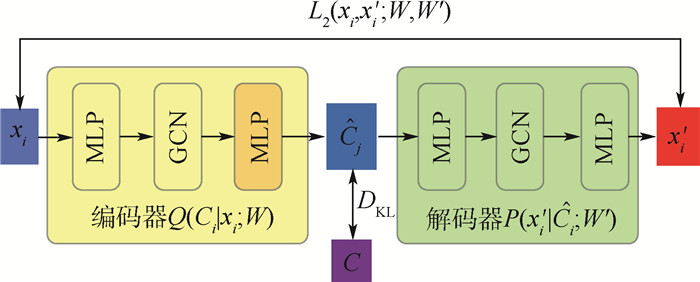
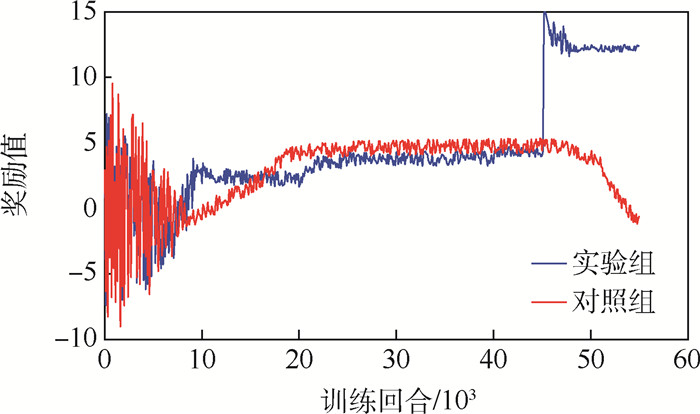
针对无人机(UAV)协同围捕问题, 提出一种基于群体意志统一的围捕策略。受人类在协作任务中的认知机理启发, 引入“群体意志”定义无人机的协作认知, 并构建双回路认知模型, 借助图卷积网络对围捕无人机获取的局部态势进行融合认知, 有效减轻无人机系统的计算负载。依靠变分推断原理和生成式自动编码器对围捕无人机进行群体意志趋同学习, 依据Apollonius圆实现协同围捕, 使无人机集群涌现出更加智能化的围捕效果。通过对比仿真验证了所提策略的有效性和智能性。
-
关键词:
- 协同围捕 /
- 群体意志统一 /
- 融合认知 /
- 趋同学习 /
- Apollonius圆
Abstract:To solve the problem of unmanned aerial vehicle (UAV) coordinated rounding up, a strategy was proposed based on the unity of group will. Inspired by the cognitive mechanism of human beings in collaborative tasks, this paper introduces "group will" to define the collaborative cognition of UAVs, builds a double-loop cognitive model, and integrates the cognition of the local situation acquired by the rounded up UAVs with the help of the graph convolutional network, so as to effectively reduce the computing load of UAVs. On the basis of the variational inference principle and generative autoencoder, the group will convergence learning is carried out on the UAV, and the coordinated rounding up is realized on the basis of the Apollonius circle so that the UAV cluster emerges a more intelligent rounding up effect. The simulation results show the effectiveness and intelligence of the designed rounding up strategy.
-

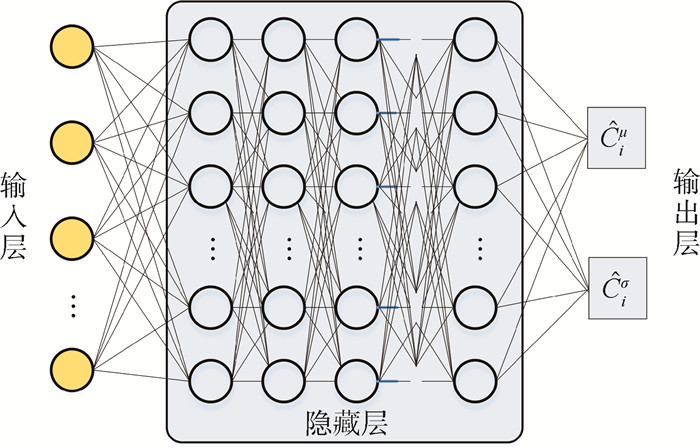
图 7 用于群体意志趋同学习的生成式自动编码器结构
Figure 7. Generative autoencoder for group will convergence learning
表 1 无人机参数设定
Table 1. UAV parameter setting
无人机类型 速度/(km·s-1) 固定物理防守半径/km 围捕无人机U1 0.15 3 围捕无人机U2 0.12 2 围捕无人机U3 0.12 2 围捕无人机U4 0.12 2 目标无人机T 0.18  下载: 导出CSV
下载: 导出CSV
-
[1] 段海滨, 申燕凯, 赵彦杰, 等. 2019年无人机热点回眸[J]. 科技导报, 2020, 38(1): 170-187. https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202001018.htmDUAN H B, SHEN Y K, ZHAO Y J, et al. Review of technological hotspots of unmanned aerial vehicle in 2019[J]. Science Technology Review, 2020, 38(1): 170-187(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202001018.htm [2] 段海滨, 张岱峰, 范彦铭, 等. 从狼群智能到无人机集群协同决策[J]. 中国科学: 信息科学, 2019, 49(1): 112-118. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htmDUAN H B, ZHANG D F, FAN Y M, et al. From wolf pack intelligence to UAV swarm cooperative decisionmaking[J]. Scientia Sinica: Informationis, 2019, 49(1): 112-118(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htm [3] ALEXOPOULOS A, SCHMIDT T, BADREDDIN E. A pursuit-evasion game between unmanned aerial vehicles[C]//2014 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO). Piscataway: IEEE Press, 2014: 74-81. [4] 吴子沉, 胡斌. 基于态势认知的无人机集群围捕方法[J]. 北京航空航天大学学报, 2021, 47(2): 424-430. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202102029.htmWU Z C, HU B. Swarm rounding up method of UAV based on situation cognition[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 424-430(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK202102029.htm [5] YASUYUKI S, HIROFUMI O, TADASHI M, et al. Cooperative capture by multi-agent using reinforcement learning application for security patrol systems[C]//2015 10th Asian Control Conference (ASCC). Piscataway: IEEE Press, 2015: 1-6. [6] 陈志鹏, 李健. 基于动物集群行为的无人机群目标围捕策略[J]. 现代计算机, 2018(2): 11-14. https://www.cnki.com.cn/Article/CJFDTOTAL-XDJS201806004.htmCHEN Z P, LI J. Cluster UAVs hunting strategy based on biological collective behaviors[J]. Modern Computer, 2018(2): 11-14(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDJS201806004.htm [7] 蔡云飞, 唐振民, 张浩峰. 基于Cross-EKF定位的多机器人协作围捕策略研究[J]. 控制与决策, 2010, 25(9): 1313-1317. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201009008.htmCAI Y F, TANG Z M, ZHANG H F. Multi-robots cooperative hunting strategy based on Cross-EKF localization[J]. Control and Decision, 2010, 25(9): 1313-1317(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201009008.htm [8] 黄天云, 陈雪波, 徐望宝, 等. 基于松散偏好规则的群体机器人系统自组织协作围捕[J]. 自动化学报, 2013, 39(1): 57-68. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201301008.htmHUANG T Y, CHEN X B, XU W B, et al. A self-organizing cooperative hunting by swarm robotic systems based on loose-preference rule[J]. Acta Automatica Sinica, 2013, 39(1): 57-68(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201301008.htm [9] 李瑞珍, 杨惠珍, 萧丛杉. 基于动态围捕点的多机器人协同策略[J]. 控制工程, 2019, 26(3): 510-514. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201903017.htmLI R Z, YANG H Z, XIAO C S. Cooperative hunting strategy for multi-mobile robot systems based on dynamic hunting points[J]. Control Engineering of China, 2019, 26(3): 510-514(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201903017.htm [10] 裴惠琴, 陈世明, 孙红伟. 动态环境下可扩展移动机器人群体的围捕控制[J]. 信息与控制, 2009, 38(4): 437-443. https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK200904009.htmPEI H Q, CHEN S M, SUN H W. Pursuit control of scalable swarm system of mobile robots in dynamic environment[J]. Information and Control, 2009, 38(4): 437-443(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK200904009.htm [11] MURO C, ESCOBEDO R, SPECTOR L, et al. Wolf-pack (Canis lupus) hunting strategies emerge from simple rules in computational simulations[J]. Behavioural Processes, 2011, 88(3): 192-197. [12] LOWE R, WU Y, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[EB/OL]. (2017-06-07)[2021-02-14]. https://arxiv.org/abs/1706.02275v1. [13] MAO H Y, LIU W L, HAO J Y, et al. Neighborhood cognition consistent multi-agent reinforcement learning[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(5): 7219-7226. [14] LIANG L, DENG F, PENG Z H, et al. A differential game for cooperative target defense[J]. Automatica, 2019, 102: 58-71. [15] KIPF T N, WELLING M. Semi-supervised classification with graph convolutional networks[C]//International Conference on Learning Representations (ICLR 2017), 2017: 1-14. [16] IOFFE S, SZEGEDY C. Batch normalization: Accelerating deep network training by reducing internal covariate shift[C]//Proceedings of the 32nd International Conference on International Conference on Machine Learning, 2015, 37: 448-456. [17] WU Z, PAN S, CHEN F, et al. A comprehensive survey on graph neural networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 4-24. [18] BLEI D M, KUCUKELBIR A, MCAULIFFE J D. Variational inference: A review for statisticians[J]. Journal of the American Statistical Association, 2017, 112(518): 859-877. [19] NAIR A, PONG V, DALAL M, et al. Visual reinforcement learning with imagined goals[EB/OL]. (2018-07-12)[2020-12-04]. https://arxiv.org/abs/1807.04742. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 556
- HTML全文浏览量: 129
- PDF下载量: 82
- 被引次数: 0
