



Design and implementation of a high precision 6-DOF parallel platform for a space optical remote sensor
-
摘要:
高精度六自由度并联平台可精密调整次镜位姿,实现空间光学遥感器地面光学装调及光学像差在轨主动校正。为解决研制高精度并联平台的多指标多约束结构优化设计及高分辨力驱动支链设计2个难点,建立了六自由度并联机构逆解数学模型及ADAMS参数化模型,确定了结构优化目标函数,结合支链长度、铰链转角等约束进行了结构优化设计,得到并联机构结构参数及驱动支链分辨力需达到60 nm的需求。基于此需求,设计了基于“无刷直流电机+滚珠丝杠+光栅尺”的驱动支链,采用PI控制律实现高精度消静差闭环伺服控制,使驱动支链分辨力达50 nm。对并联平台精度进行光学测试,结果表明,平台带载平移分辨力为0.2 μm,转角分辨力为1″,满足指标要求。该平台已成功应用于空间相机的地面光学装调及像差主动校正实验,为在轨应用奠定了理论与实践基础。
Abstract:The high precision 6-DOF parallel platform can precisely adjust the position and pose of the secondary mirror of the space optical remote sensor, which could realize the ground optical alignment and the active correction of optical aberration on orbit. In order to solve the two difficulties, ie, ulti index and multi constraint structural optimization design and high-resolution driving strut design, in the development of a high-precision parallel platform, 3 steps are taken as follows: Firstly, the inverse solution mathematical model and ADAMS parametric model of the 6-DOF parallel mechanism are established, and the structure optimization objective function is determined. The structure optimization design is carried out in combination with the constraints such as strut length and hinge angle, therefore, the structure parameters and the requirement of 60 nm driving strut resolution are obtained. Then, to get high resolution strut, the driving strut based on "brushless DC motor+ball screw+grating ruler" is designed, and PI control law is used to realize the high-precision closed-loop servo control of eliminating static error. As a result, the resolution of the driving strut reaches 50 nm. Finally, the accuracy of the parallel platform is tested, and the test results show that the resolution of the platform is 0.2 μm, and the angular resolution is 1″, which meet the requirements of the index. The platform has been successfully applied to the ground optical alignment and aberration active correction experiment of the space remote sensor, which lays a solid theoretical and practical foundation for the on orbit application.
-

图 1 空间光学遥感器在轨像差主动校正原理
Figure 1. Active correction principle of on orbit aberrations for space optical remote sensors
表 1 六自由度次镜平台主要指标
Table 1. Main indexes of 6-DOF secondary mirror platform
指标 数值 X, Y, Z轴平移调整分辨力/μm 0.2 X, Y, Z轴运动范围/mm ±2 绕X,Y, Z轴转角分辨力/(″) 1 绕X, Y, Z轴转动范围/(°) ±1 承载能力/kg 25 外形包络/(mm×mm) Φ548×280  下载: 导出CSV
下载: 导出CSV
表 2 优化后的六自由度并联机构结构参数
Table 2. Optimized structural parameters of 6-DOF parallel mechanism
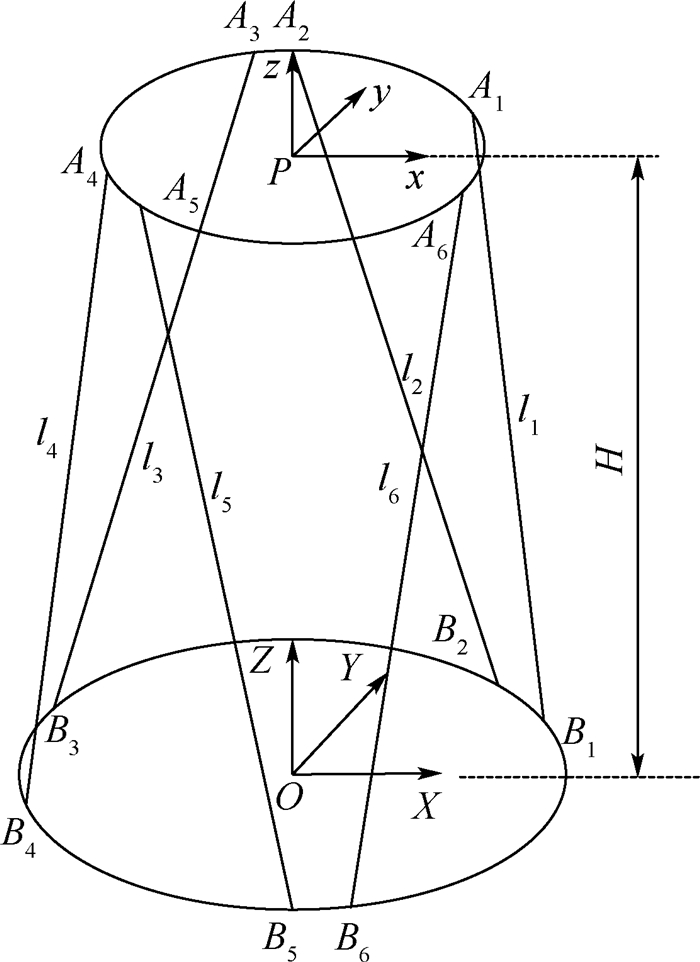
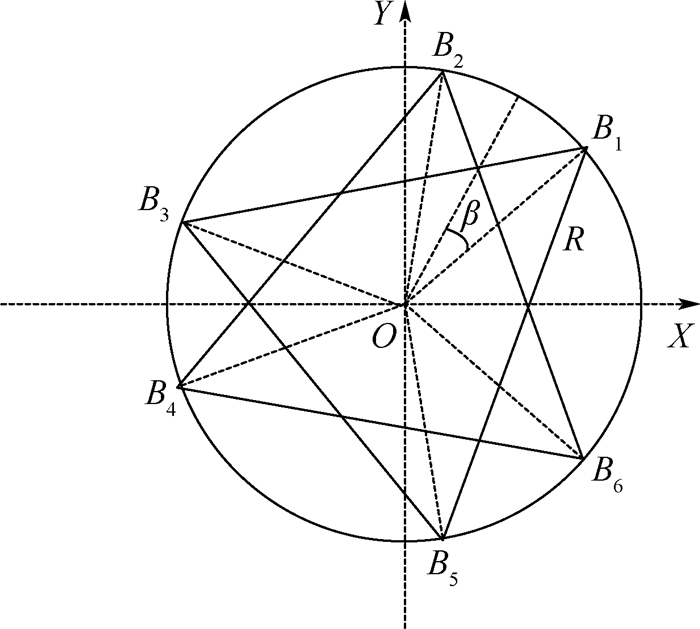
结构参数 优化结果 r/mm 239.51 R/mm 249 H/mm 195.03 α/rad 0.115 β/rad 0.134
下载: 导出CSV
表 3 平台位姿分辨力对应的驱动支链量化步数
Table 3. Driving struts quantization steps corresponding to platform pose resolution
自由度 量化 驱动支链1 驱动支链2 驱动支链3 驱动支链4 驱动支链5 驱动支链6 X轴平移 -1 2 -1 -1 2 -1 Y轴平移 1 0 -1 1 0 -1 Z轴平移 1 1 1 1 1 1 绕X轴转动 1 1 0 0 -1 -1 绕Y轴转动 -1 0 1 1 0 -1 绕Z轴转动 1 -1 1 -1 1 -1
下载: 导出CSV
表 4 驱动支链量化步数对应的平台位姿分辨力
Table 4. Platform pose resolution corresponding to driving struts quantitation steps
自由度 分辨力 X/μm Y/μm Z/μm RX/(″) RY/(″) RZ/(″) X轴平移 0.14 0 0 0 -0.007 0 Y轴平移 0 0.08 0 0.004 0 0 Z轴平移 0 0 0.07 0 0 0 绕X轴转动 0 -0.01 0 0.109 0 0 绕Y轴转动 -0.017 5 0 0 0 0.114 0 绕Z轴转动 0 0 0 0 0 0.066
下载: 导出CSV
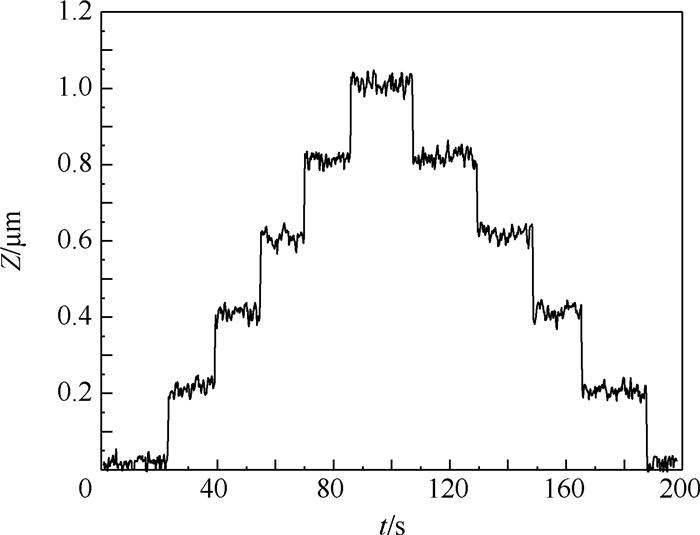
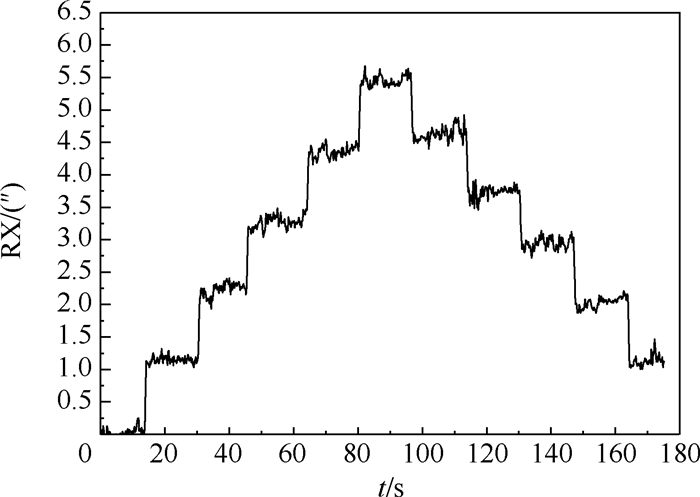
表 5 平台分辨力指标与实测值对比
Table 5. Comparison between platform resolution index and measured value
自由度 指标 实测值 X轴平移/μm 0.2 0.2 Y轴平移/μm 0.2 0.2 Z轴平移/μm 0.2 0.2 绕X轴旋转/(″) 1 1 绕Y轴旋转/(″) 1 1 绕Z轴旋转/(″) 1 1
下载: 导出CSV
-
[1] CLAMPIN M. The James Webb space telescope (JWST)[J]. Advances in Space Research, 2008, 41(12): 1983-1991. doi: 10.1016/j.asr.2008.01.010 [2] WARDEN R M. Cryogenic nano-actuator for JWST[C]//Proceedings of the 38th Aerospace Mechanisms Symposium, 2006: 239-252. [3] 谭爽. 空间光学遥感器次镜六自由度精密控制方法研究[D]. 北京: 中国空间技术研究院, 2015.TAN S. Studies on high precision control of 6-DOF second mirror of the space optical remote sensor[D]. Beijing: China Academy of Space Technology, 2015(in Chinese). [4] MERLET J P. Parallel robots[M]. 2nd ed. Berlin: Springer, 2006: 66-74. [5] KONG X W, GOSSELIN C. Type synthesis of parallel mechanisms[M]. Berlin: Springer, 2007. [6] 王富国, 张景旭, 杨飞, 等. 四翼梁式次镜支撑结构的研究[J]. 光子学报, 2009, 38(3): 674-676. https://www.cnki.com.cn/Article/CJFDTOTAL-GZXB200903047.htmWANG F G, ZHANG J X, YANG F, et al. Crossed-plate type support structure of the second mirror[J]. Acta Photonica Sinica, 2009, 38(3): 674-676(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GZXB200903047.htm [7] 温正方, 张景旭, 张丽敏. 五自由度次镜调整机构的研究[J]. 工程设计学报, 2010, 17(6): 473-478. https://www.cnki.com.cn/Article/CJFDTOTAL-GCSJ201006017.htmWEN Z F, ZHANG J X, ZHANG L M. Research of five-degree-of-freedom adjustment mechanismfor secondary mirror[J]. Journal of Engineering Design, 2010, 17(6): 473-478(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GCSJ201006017.htm [8] 房海蓉, 王立, 张涛强, 等. 一种含闭环吏链的新型并联机构设计与分析[J]. 北京航空航天大学学报, 2019, 45(3): 454-463. doi: 10.13700/j.bh.1001-5965.2018.0411FANG H R, WANG L, ZHANG T Q, el al. Design and analysis of a novel parallel mechanism with closed-loop limbs[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3): 454-463(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0411 [9] 房海蓉, 李壮壮. 新型大转角2T2R并联机构的设计与分析[J]. 北京航空航天大学学报, 2020, 46(3): 465-473. doi: 10.13700/j.bh.1001-5965.2019.0217FANG H R, LI Z Z. Design and analysis of a new large rotation angle 2T2R parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(3): 465-473(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0217 [10] 陈淼, 张氢, 葛韵斐, 等. 2UPR-RRU并联机构及其运动学分析[J]. 北京航空航天大学学报, 2019, 45(6): 1145-1152. doi: 10.13700/j.bh.1001-5965.2018.0575CHEN M, ZHANG Q, GE Y F, et al. 2UPR-RRU parallel mechanism and its kinematic analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1145-1152(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0575 [11] 王保兴, 孟刚, 林苗, 等. 3-PPP型柔性并联微定位平台的设计与分析[J]. 北京航空航天大学学报, 2020, 46(4): 798-807. doi: 10.13700/j.bh.1001-5965.2019.0286WANG B X, MENG G, LIN M, et al. Design and analysis of a 3-PPP compliant parallel micro-positioning stage[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 798-807(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0286 [12] TOULEMONT Y, PASSVOGEL T, PILBRATT G L, et al. The 3.5-m all-SiC telescope for HERSCHEL[C]//Proc SPIE 5487, Optical, Infrared, and Millimeter Space Telescopes. Bellingham: SPIE, 2004, 5487: 1119-1128. [13] SCHIPANI P, PERROTTA F, MOLFESE C, et al. The VST secondary mirror support system[C]//Proc SPIE 7018, Advanced Optical and Mechanical Technologies in Telescopes and Instrumentation. Bellingham: SPIE, 2008, 7018: 1380-1389. [14] 于阳, 徐振邦, 于鹏, 等. 空间光学遥感器次镜定位平台的设计与测试[J]. 载人航天, 2016, 22(1): 74-80. https://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201601014.htmYU Y, XU Z B, YU P, et al. Design and test of parallel platform with precise positioning for secondary mirrors in space optical telescope[J]. Manned Spaceflight, 2016, 22(1): 74-80(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201601014.htm [15] GOUGH V E, WHITEHALL S G. Universal tyre test machine[C]//Proceedings of the 9th International Technical Congress, 1962: 117. [16] STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers, 1965, 180(1): 371-386. [17] 黄真, 孔令富, 方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997: 18-29.HUANG Z, KONG L F, FANG Y F. Mechanism theory and control of parallel manipulator[M]. Beijing: China Machine Press, 1997: 18-29(in Chinese). [18] CRAIG J J. Introduction to robotics mechanics and control[M]. Upper Saddle River: Prentice Hall, 2005: 28-41. [19] 卢礼华, 梁迎春, 大刀川博之, 等. 快速无超调纳米定位[J]. 纳米技术与精密工程, 2006, 4(3): 212-216. https://www.cnki.com.cn/Article/CJFDTOTAL-NMJM200603009.htmLU L H, LIANG Y C, TACHIKAWA H, et al. Rapid nanometer positioning without overshoot[J]. Nanotechnology and Precision Engineering, 2006, 4(3): 212-216(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NMJM200603009.htm -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 1242
- HTML全文浏览量: 145
- PDF下载量: 38
- 被引次数: 0
