



Cooperative tactical recognition of dual-aircraft formation under incomplete information in BVR air combat
-
摘要:
针对超视距(BVR)空战过程中,受探测装置性能限制和敌方干扰等原因,导致目标信息易缺失,从而难以实时准确地识别敌方协同空战战术的问题,提出了一种基于动态贝叶斯网络(DBN)与参数学习的超视距空战双机协同战术识别方法。分析了超视距空战条件下的双机协同战术特征,根据长机和僚机的职能分工、当前态势及机动动作,构建了识别网络模型;为提高模型对双机协同战术的识别概率,采用期望最大参数学习方法优化网络参数;基于自回归模型对缺失目标信息进行修补,提出非完备信息下的双机协同战术识别推理算法。通过开展空战对抗仿真实验,验证了双机协同战术识别方法对于非完备信息下的超视距空战双机协同战术具有较高的识别概率和较好的实时性。
Abstract:In the process of beyond-visual-range (BVR) air combat, due to the limitation of detection equipment performance and enemy interference, the target information is easy to get lost, which makes it difficult to identify the enemy’s cooperative air combat tactics in real time. A method of cooperative tactical recognition is proposed based on dynamic Bayesian network (DBN) and parameter learning. Firstly, the cooperative tactics of dual-aircraft formation in BVR air combat are analyzed. According to the functional tasks of leader and wingman, the current situation information and fighter maneuver, a DBN recognition model is established. Then, to improve the recognition rate of the model, the expected maximum parameter learning method is used to optimize the network parameters. Finally, based on the auto-regressive model, the missing target information is repaired, and the reasoning algorithm of cooperative tactical recognition under incomplete information is proposed. The simulation results show that the method of cooperative tactical recognition has high recognition accuracy and good real-time performance for cooperative tactics under incomplete information in BVR air combat.
-
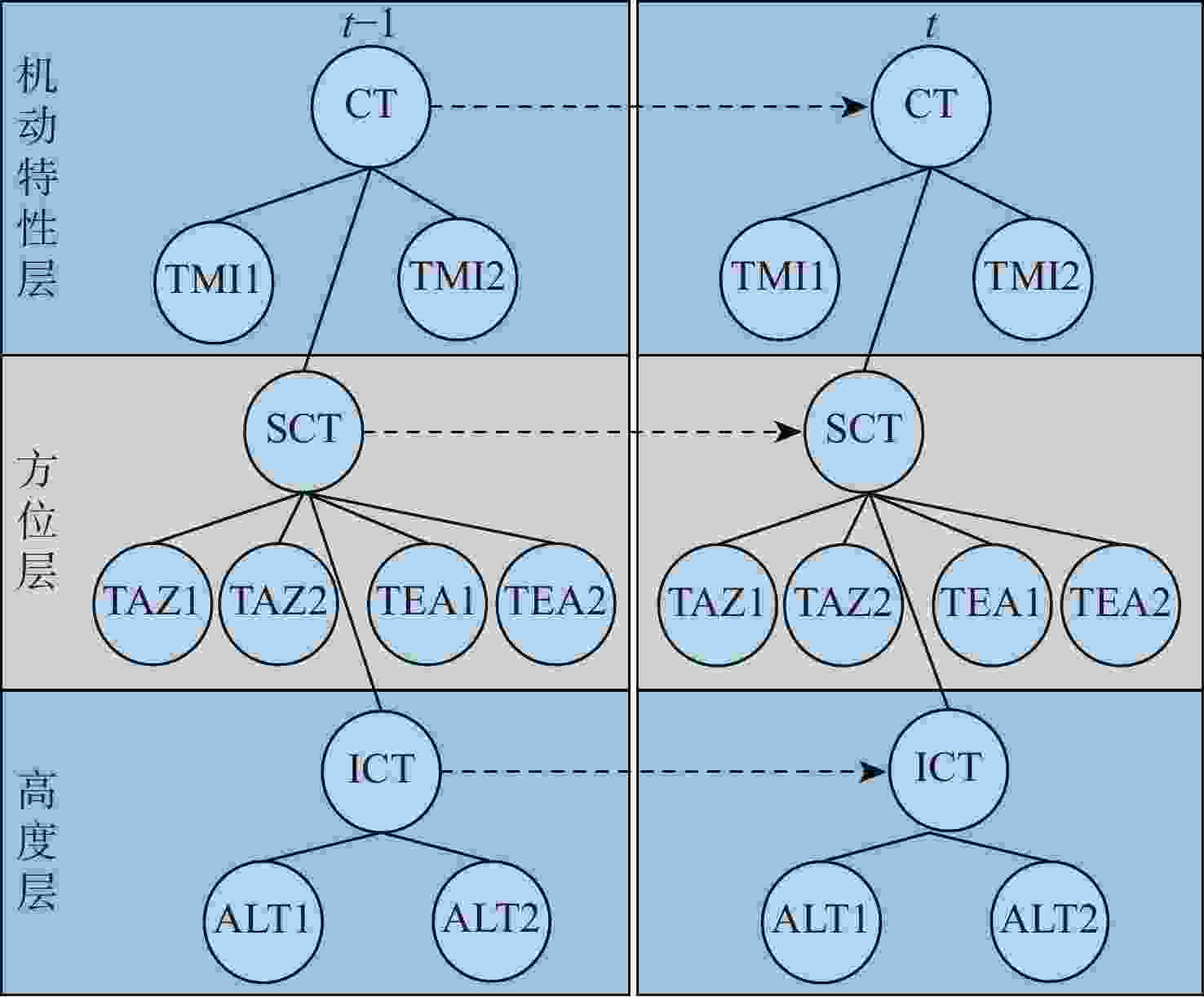
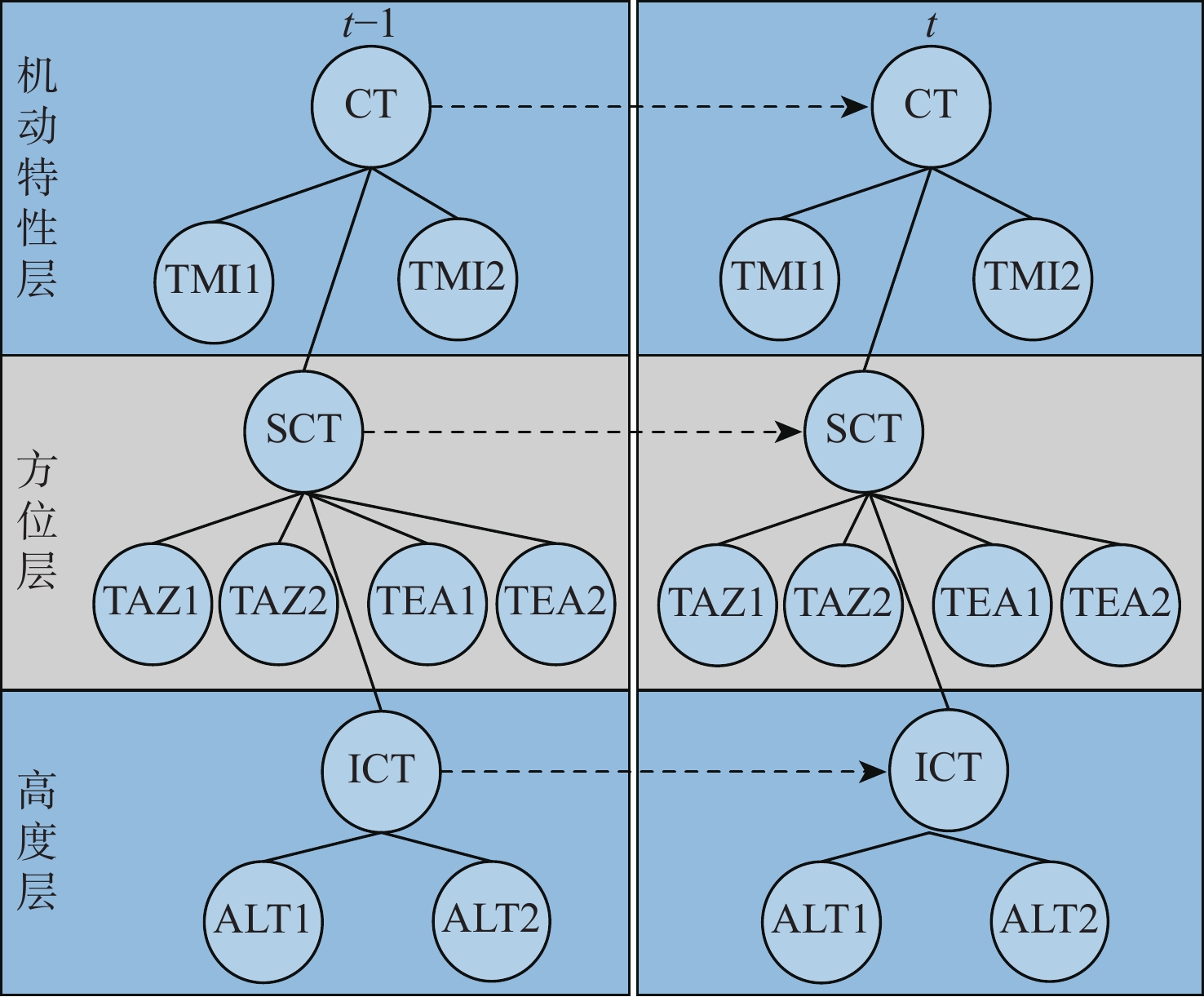
图 1 双机协同战术识别网络模型
Figure 1. Dual-aircraft cooperative tactical recognition network model
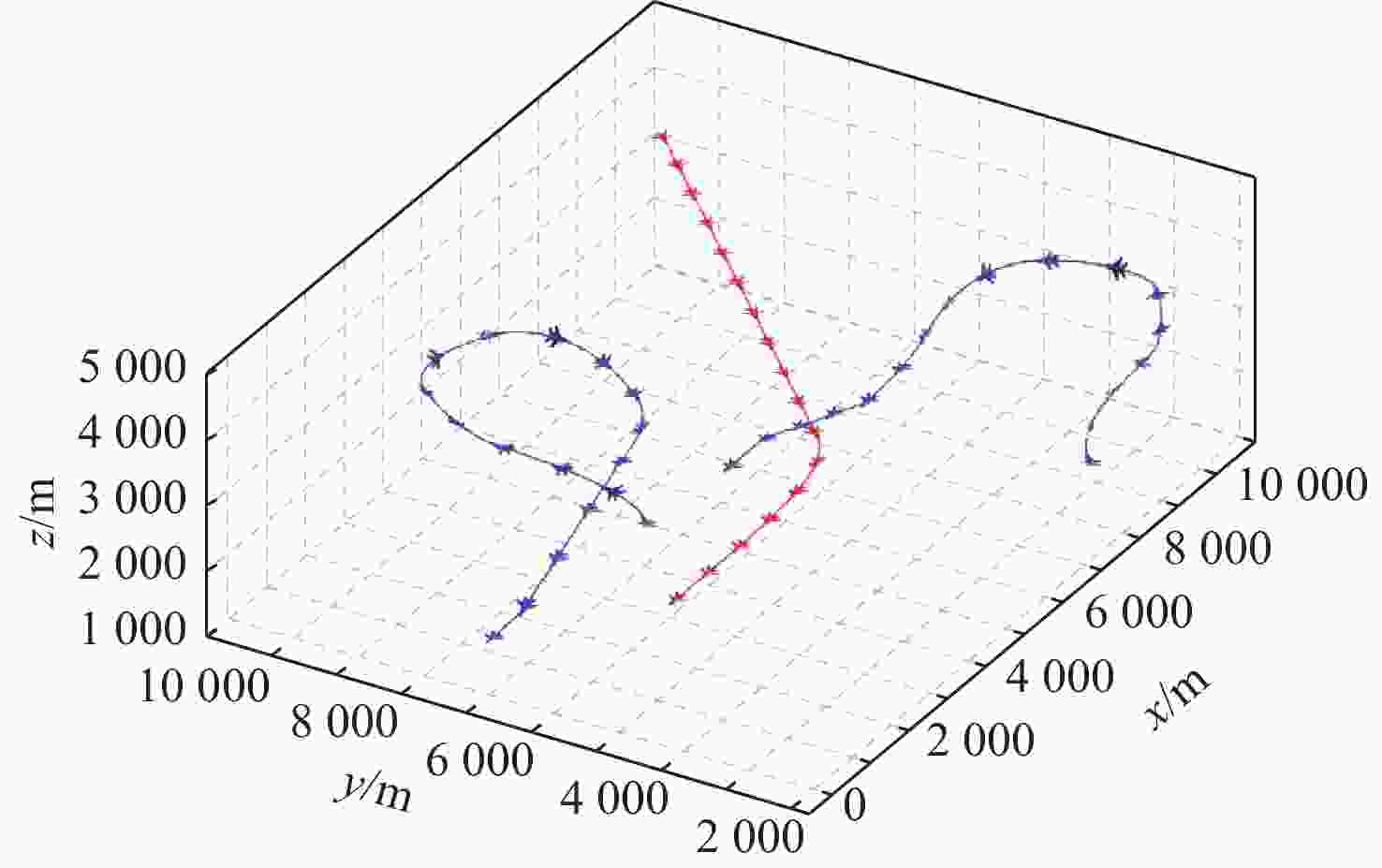
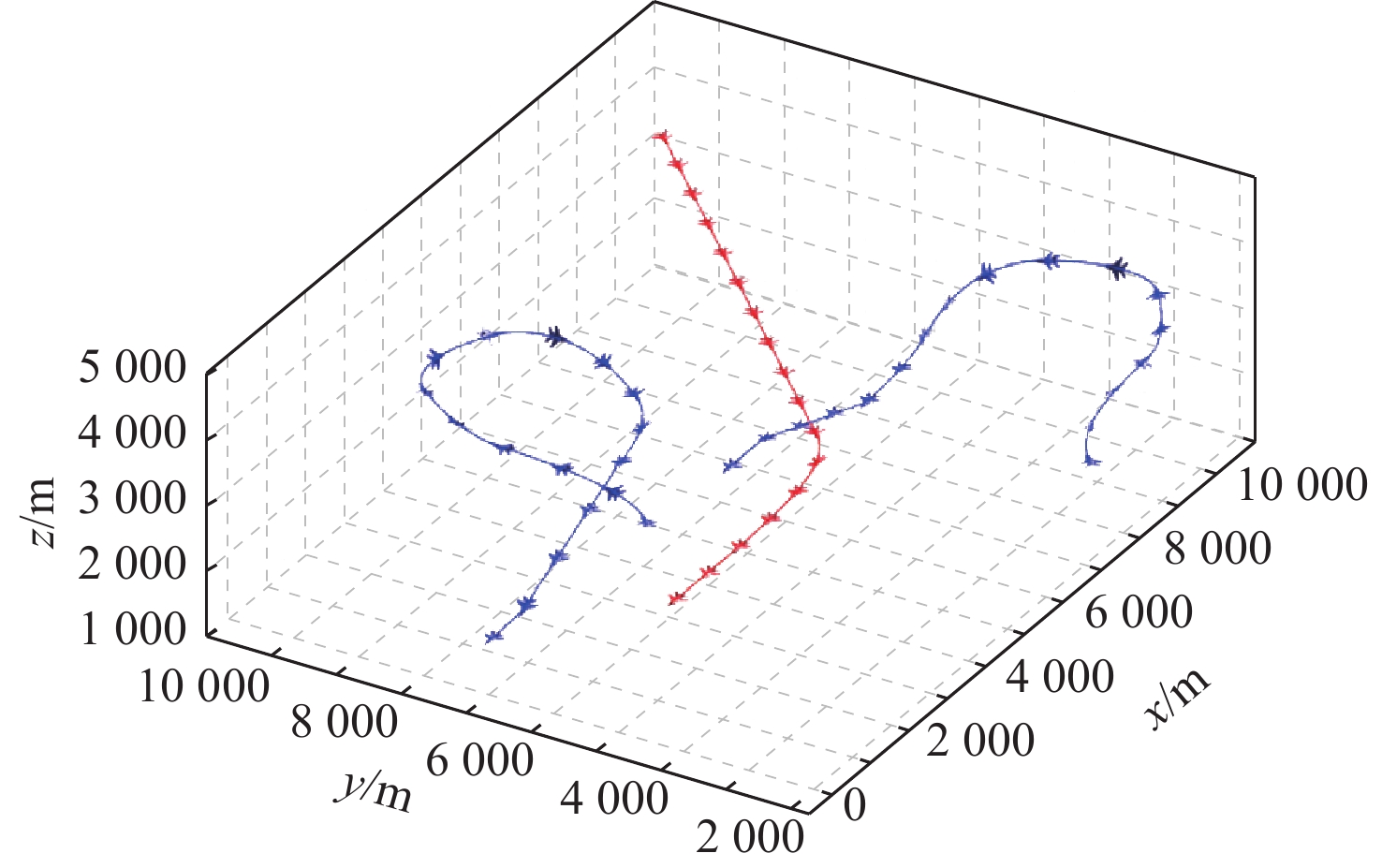
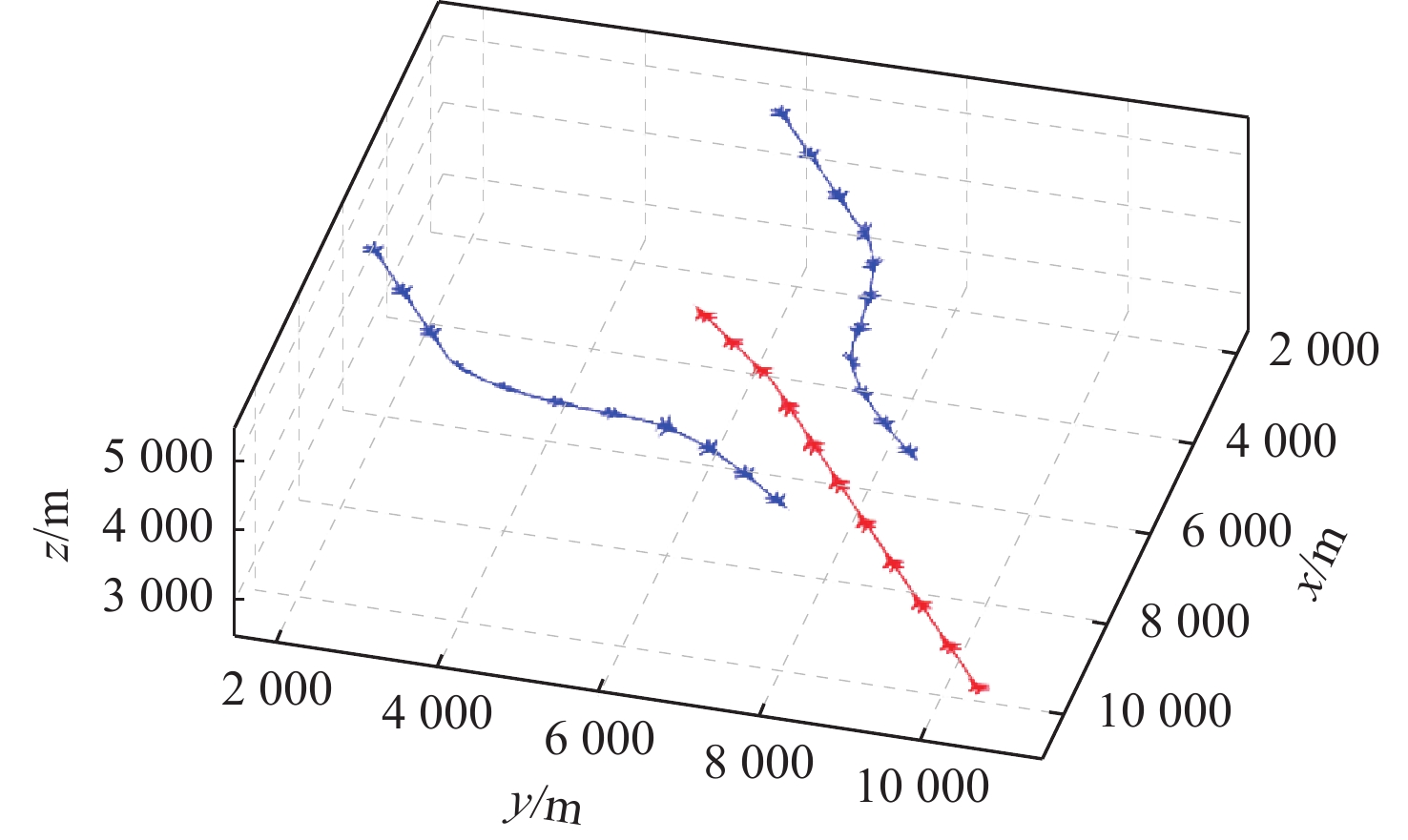
图 3 二对一协同空战飞行仿真轨迹
Figure 3. Flight simulation trajectory of two-to-one cooperative air combat

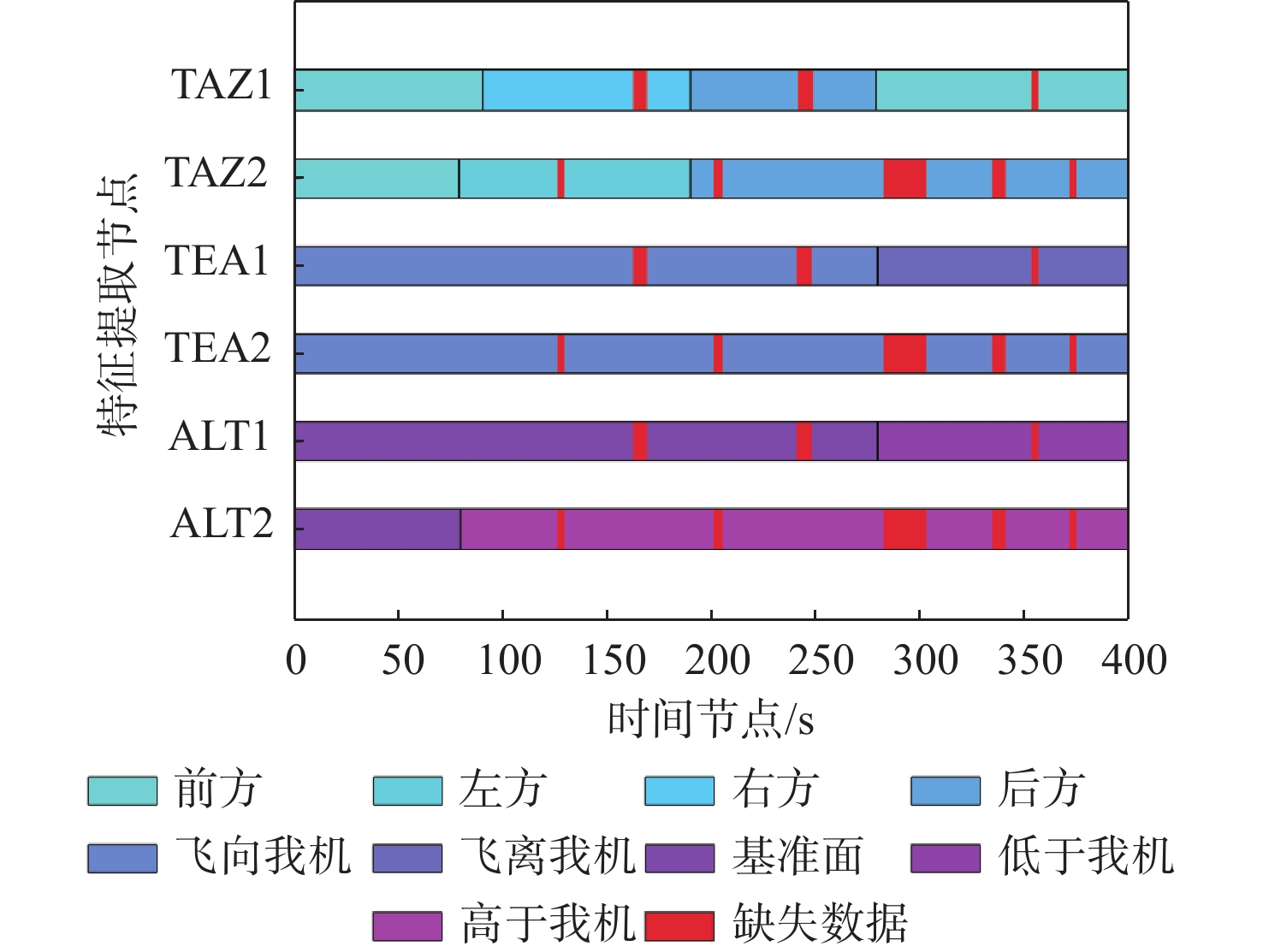
图 4 未进行数据修补的蓝方双机空间占位特征
Figure 4. Space occupying feature of blue dual aircrafts without data patching

图 5 数据修补后蓝方双机空间占位特征
Figure 5. Space occupying feature of blue dual aircraft after data patching
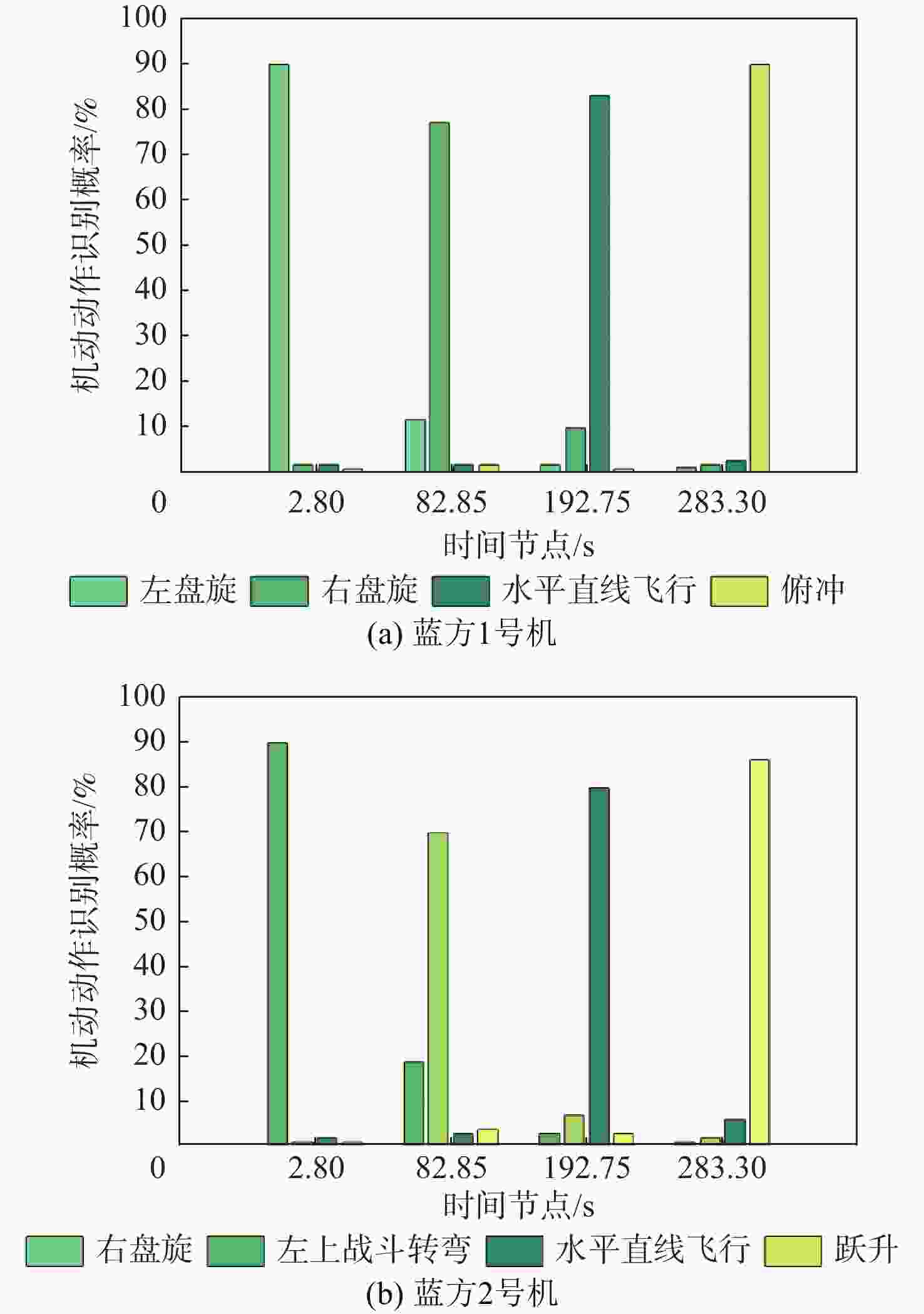
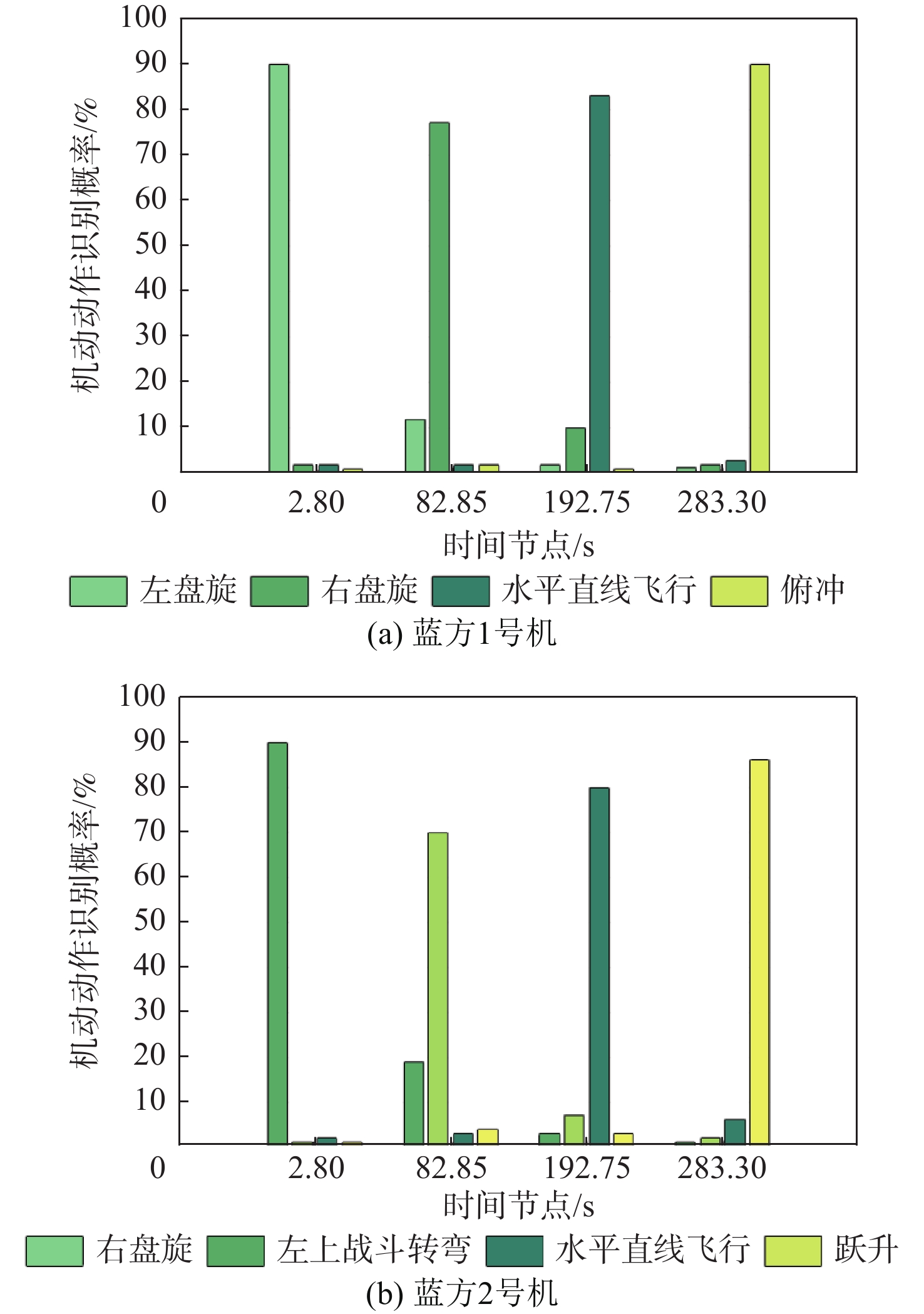
图 6 蓝方双机机动动作识别概率
Figure 6. Probability of maneuver recognition for dual aircraft in blue side

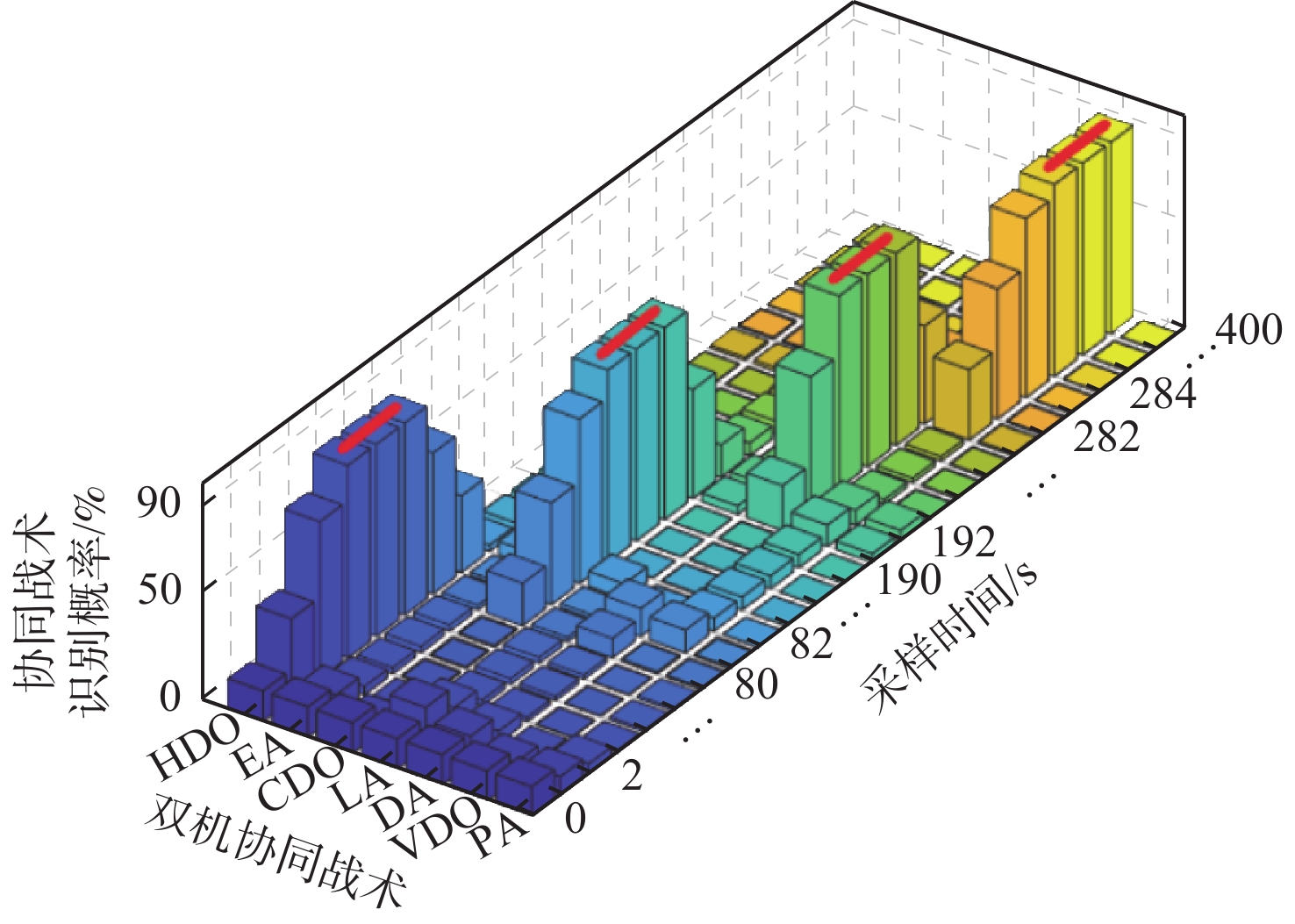
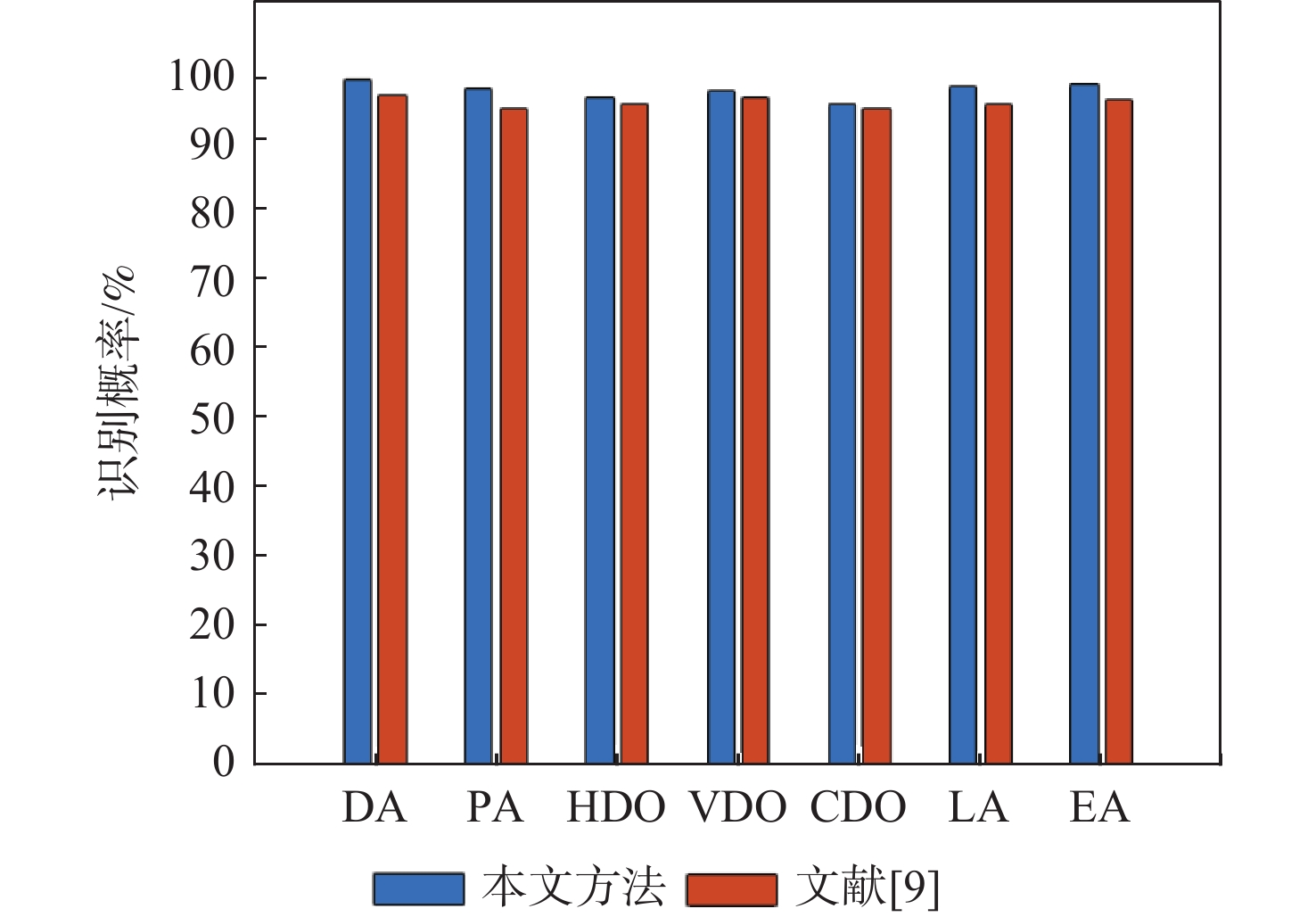
图 7 参数学习后识别概率分布
Figure 7. Probability distribution of recognizing after parameter learning
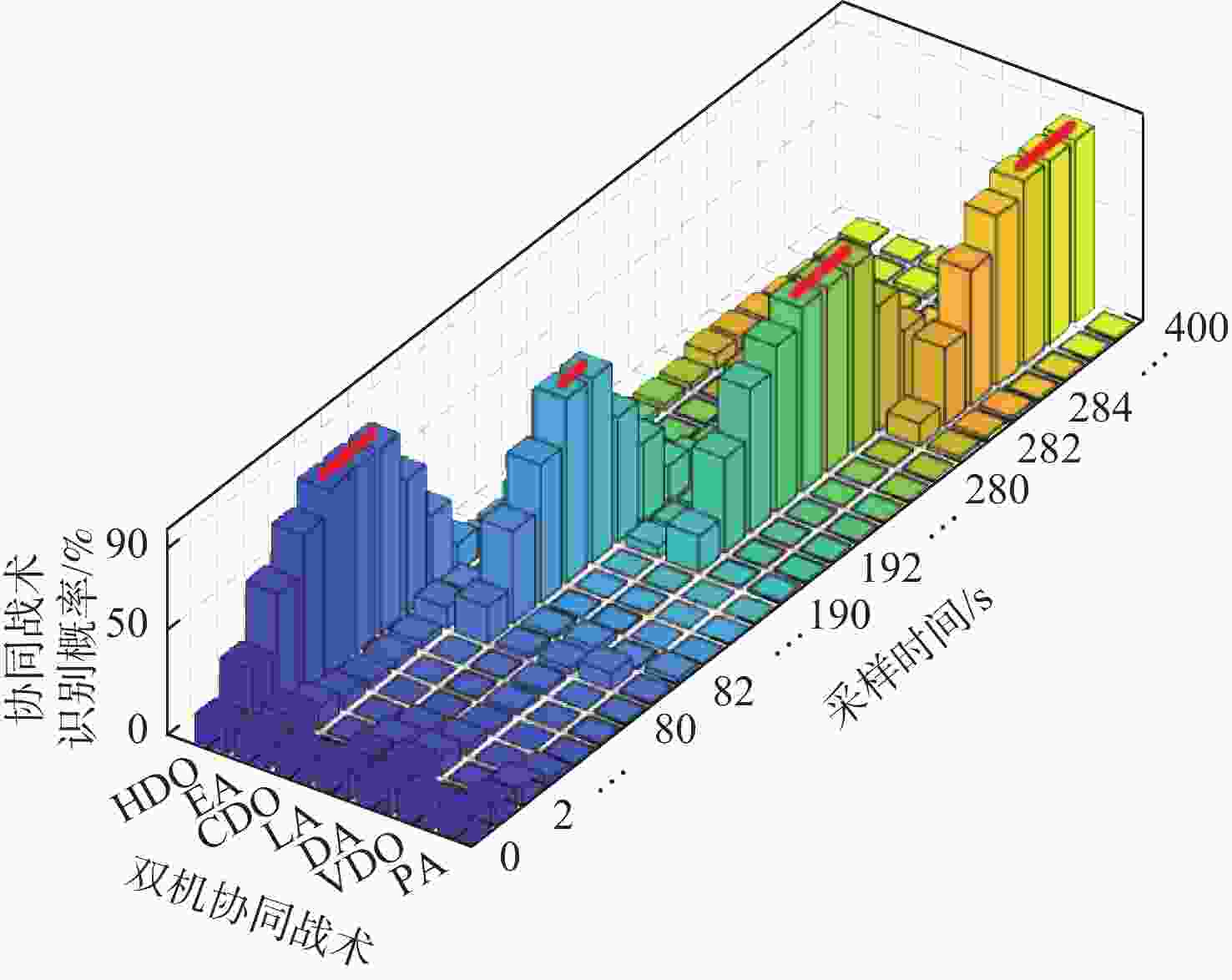
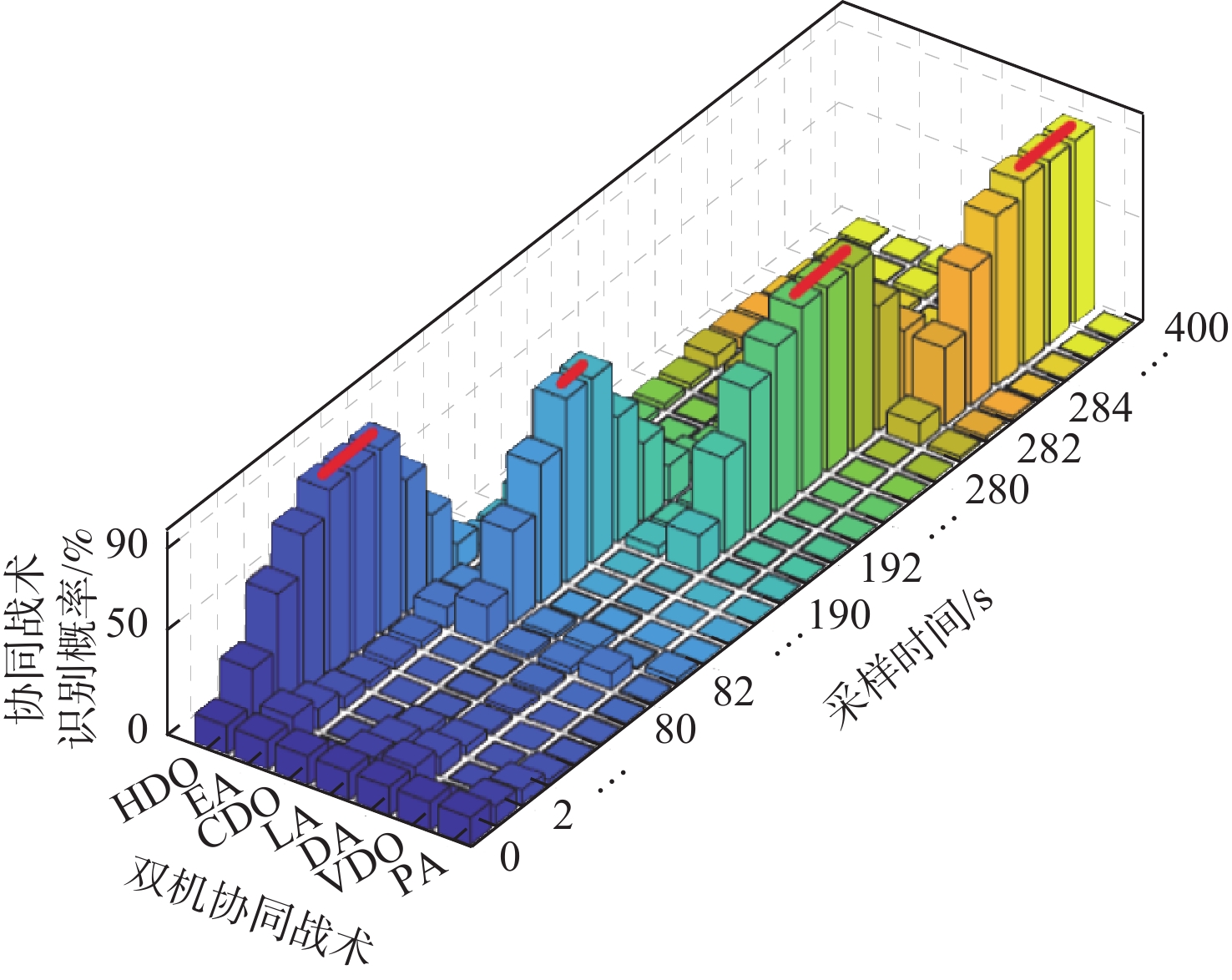
图 8 参数学习前识别概率分布
Figure 8. Probability distribution of recognizing before parameter learning
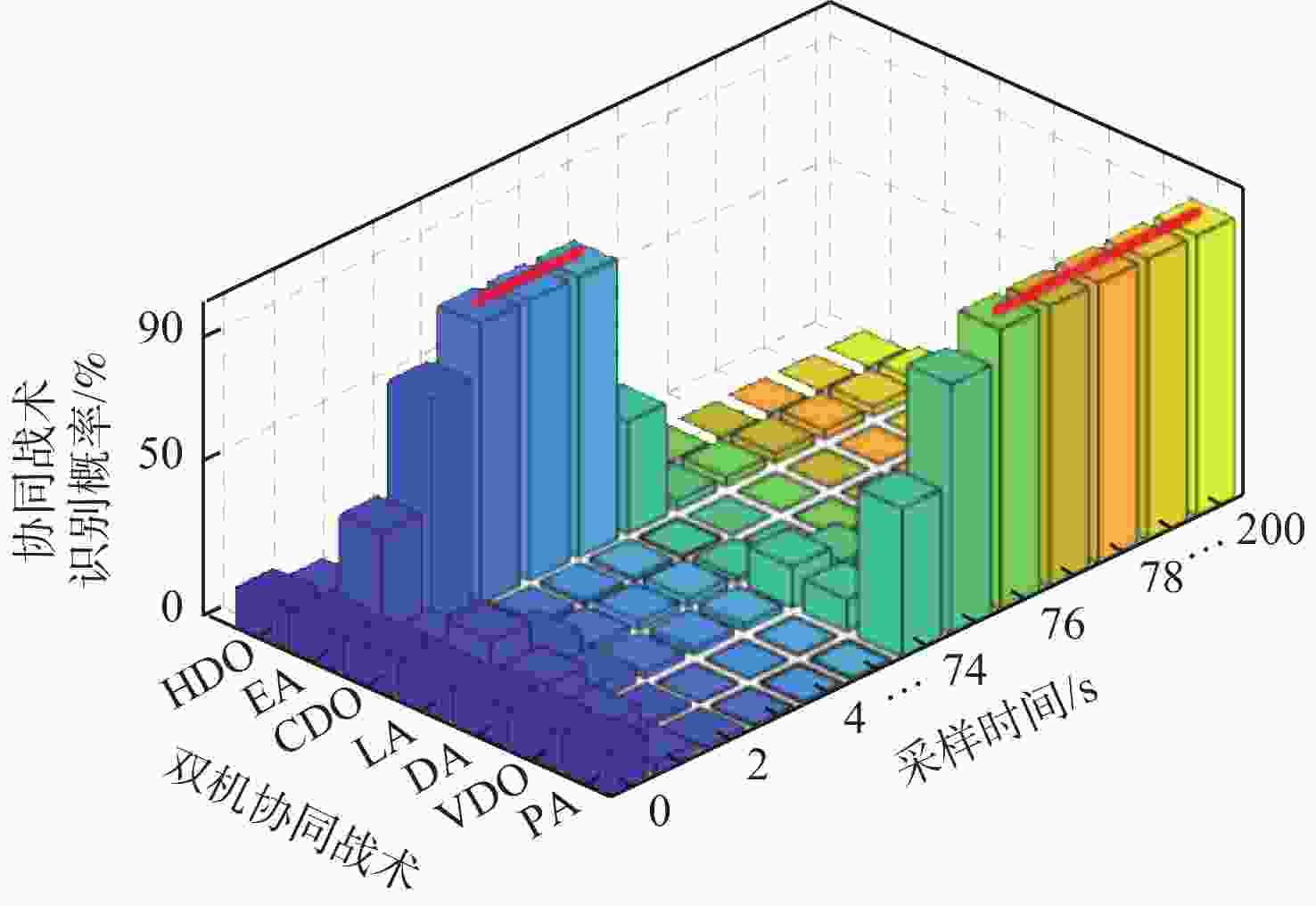
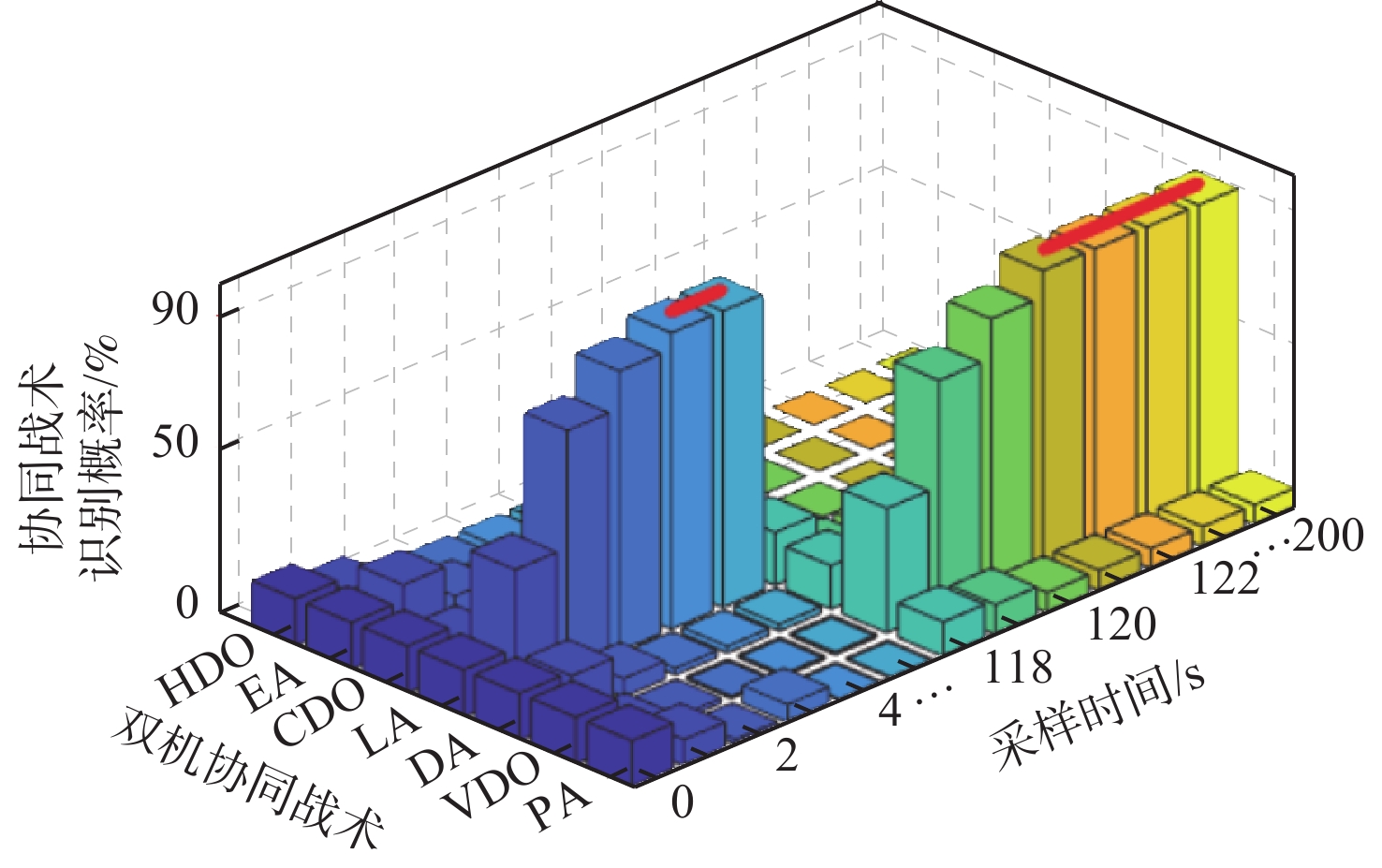
图 11 迎头态势下协同战术识别概率分布
Figure 11. Probability distribution of cooperative tactical identification in face-on situation

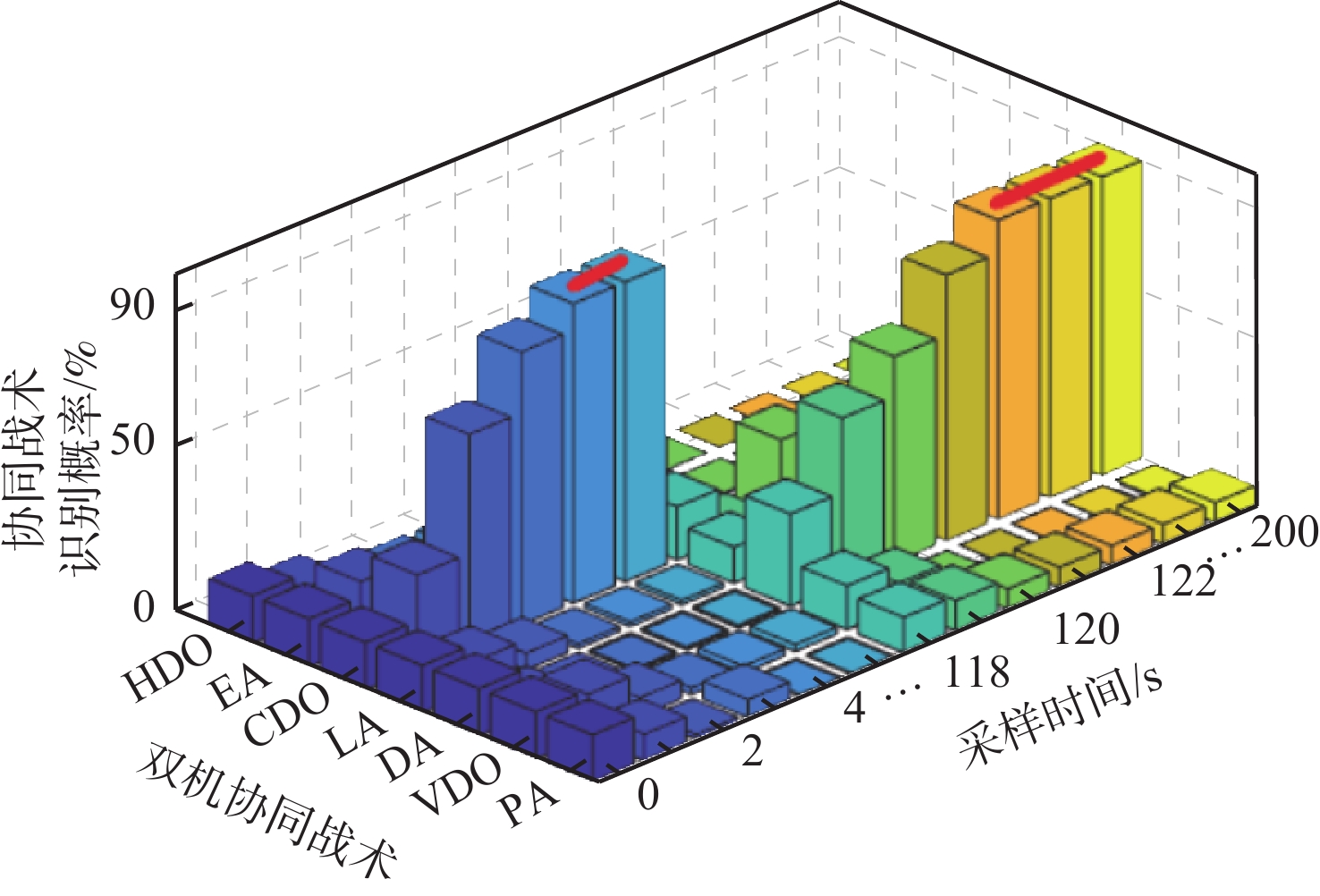
图 13 侧方态势下协同战术识别概率分布
Figure 13. Probability distribution of cooperative tactical identification in lateral situation

图 15 尾后态势下协同战术识别概率分布
Figure 15. Probability distribution of cooperative tactical identification in rear situation
表 1 典型战术下的长机特征信息描述
Table 1. Description of leader characteristics information under typical tactics
协同战术 目标长机
空间占位目标长机
机动特性目标长机
运动趋势尾后攻击
(DA)我机后方 水平直线 飞向我机 钳形攻击
(PA)我机前方 左/右盘旋 飞向我机 侧方攻击
(LA)我机左/右方 水平直线 飞向我机 对头攻击
(EA)我机前方 水平直线 飞向我机 水平疏开
(HDO)我机左/右/
前方左/右盘旋 先飞离我机
后飞向我机垂直疏开
(VDO)我机后方 跃升机动 飞向我机 组合疏开(CDO) 我机左上/右上方 左上/右上
战斗转弯先飞离我机
后飞向我机 下载: 导出CSV
下载: 导出CSV
表 2 典型战术下的僚机特征信息描述
Table 2. Description of wingman characteristics information under typical tactics
协同战术 目标僚机
空间占位目标僚机
机动特性目标僚机
运动趋势尾后攻击
(DA)我机后方 水平直线 飞向我机 钳形攻击
(PA)我机前方 左/右盘旋 飞向我机 侧方攻击
(LA)我机左/
右方水平直线 飞向我机 对头攻击
(EA)我机前方 先水平直线
后左/右盘旋飞向我机 水平疏开
(HDO)我机右/左/前方 左/右盘旋 先飞离我机
后飞向我机垂直疏开
(VDO)我机前方 俯冲机动 飞离我机 组合疏开
(CDO)我机右
/左方右下/左下战斗转
弯左/右盘旋先飞离我机
后飞向我机
下载: 导出CSV
表 3 节点含义及状态集说明
Table 3. Description of node meaning and state set
变量 变量含义 状态集 ALT1
ALT2目标相对高度 高于我机(ALT>400 m)
基准面 (−400 m<ALT<400 m)
低于我机 (ALT<−400 m)TAZ1
TAZ2目标
方位角前方(−40o~40o)、右方(40o~140o)、
左方 (−140o~−40o)
后方 (−140o~−180o&140o~180o)TEA1
TEA2目标进入角 飞向我机(90o~180o)
飞离我机(0o~90o)TMI1
TMI2目标机动动作 水平直线飞行、俯冲、跃升、左盘旋、
右盘旋、半滚倒转、斤斗、左上战斗转弯、
右上战斗转弯、蛇形机动ICT 高度分类
协同战术高度保持类协同战术集(HK)
高度差类协同战术集(HD)SCT 方位分类
协同战术前方高度保持类协同战术(FHK)、
侧方高度保持类协同战术(LHK)、
垂直疏开战术(VDO)、
组合疏开战术(CDO)、
尾后攻击战术(DA)CT 协同战术 对头攻击战术(EA)、侧方攻击战术(LA)、
尾后攻击战术(DA)、钳形攻击战术(PA)、
水平疏开战术(HDO)、垂直疏开战术(VDO)、
组合疏开战术(CDO)、其他战术
下载: 导出CSV
表 4 初始概率分布设置
Table 4. Initial probability distribution setting
ICT p(ALT1|ICT)(H, E, L) p(ALT2|ICT)(H, E, L) ICT_HK (0.32,0.36,0.32) (0.32,0.36,0.32) ICT_HD (0.34,0.32,0.34) (0.34,0.32,0.34)
下载: 导出CSV
表 5 最终概率分布设置
Table 5. Final probability distribution setting
ICT p(ALT1|ICT)(H,E, L) p(ALT2|ICT)(H, E, L) ICT_HK (0.30,0.42,0.28) (0.30,0.42,0.28) ICT_HD (0.37,0.30,0.33) (0.37,0.30,0.33)
下载: 导出CSV
表 6 空间占位初始参数设置
Table 6. Initial parameter setting of space occupancy
无人机 经度/(°) 纬度/(°) 高度/m 速度/(m·s−1) 航向
/(°)红方1号机 124.06 28.63 3000 220 225 蓝方1号机 123.96 28.48 3000 250 45 蓝方2号机 123.88 28.55 3000 250 45
下载: 导出CSV
表 7 高度数据样本信息
Table 7. Height data sample information
时刻 蓝方1号机
高度ALT1/m蓝方2号机
高度ALT2/m时刻 蓝方1号机
高度ALT1/m蓝方2号机
高度ALT2/mT1 3000.00 3000.00 T11 2995.00 — T2 2999.50 3000.50 T12 — — T3 2999.00 3001.00 T13 2994.00 — T4 2998.50 3001.50 T14 2993.50 — T5 2998.00 3002.00 T15 2993.00 — T6 2997.50 — T16 — — T7 2997.00 — T17 2992.00 — T8 — — T18 2991.50 3008.50 T9 2996.00 — T19 2991.00 3009.00 T10 2995.50 — T20 — 3009.50 注:“—”表示数据缺失。
下载: 导出CSV
表 8 目标方位角数据样本信息
Table 8. Target azimuth data sample information
时刻 蓝方1号机
方位角TAZ1/(°)蓝方2号机
方位角TAZ2/(°)时刻 蓝方1号机
方位角TAZ1/(°)蓝方2号机
方位角TAZ2/(°)T1 45.32 171.50 T11 42.11 — T2 44.71 171.61 T12 — — T3 44.56 171.77 T13 41.74 — T4 44.33 171.85 T14 41.51 — T5 44.16 171.91 T15 41.20 — T6 43.67 — T16 — — T7 43.41 — T17 39.66 — T8 — — T18 38.70 173.21 T9 42.67 — T19 37.11 173.35 T10 42.43 — T20 — 173.51 注:“—”表示数据缺失。
下载: 导出CSV
表 9 目标双机方位角、高度的预测模型参数
Table 9. Parameters of azimuth and altitude prediction model for dual aircraft
模型参数 阶数 自回归参数向量估计 蓝方1号机高度 3 $\hat{{\boldsymbol{a}}}_{ {\text{ALT} }1} = [ - 0.35,1.65, - 0.30]$ 蓝方1号机方位角 2 $\hat {{\boldsymbol{a}}}_{ {\text{TAZ1} } } = [1.632, - 0.627]$ 蓝方2号机高度 3 $\hat{{\boldsymbol{a}}}_{ {\text{ALT} }2} = [0.95, - 0.85,0.90]$ 蓝方2号机方位角 2 $\hat{{\boldsymbol{a}}}_{ {\text{TAZ2} } } = [0.667,0.335]$
下载: 导出CSV
表 10 迎头态势下空间占位初始参数设置
Table 10. Initial parameter setting of space occupancy in face-on situation
无人机 x/m y/m z/m 速度/(m·s−1) 航向
/(°)红方1号机 10517 10382 3000 250 225 蓝方1号机 5880 2115 5000 250 45 蓝方2号机 1958 6217 5000 250 45
下载: 导出CSV
表 11 侧方态势下空间占位初始参数设置
Table 11. Initial parameter setting of space occupancy in lateral situation
无人机 x/m y/m z/m 速度/(m·s−1) 航向
/(°)红方1号机 5944 8323 3500 250 270 蓝方1号机 2116 6858 3500 250 0 蓝方2号机 2118 7840 5000 250 0
下载: 导出CSV
表 12 尾后态势下空间占位初始参数设置
Table 12. Initial parameter setting of space occupancy in rear situation
无人机 x/m y/m z/m 速度/(m·s−1) 航向
/(°)红方1号机 4833 7345 3500 250 0 蓝方1号机 2116 6858 3500 250 0 蓝方2号机 2118 7840 5000 250 0
下载: 导出CSV
表 13 战场环境与战术合理性选择
Table 13. Rational selection of battlefield environment and tactics
高度层 DA PA HDO VDO CDO LA EA 高空层
(10000 ~20000 m)√ √ 中间层
(3000 ~10000 m)√ √ √ √ √ √ √ 低空层
(1000 ~3000 m)√ √ √ √ √
下载: 导出CSV
-
[1] MA Y, WANG G, HU X, et al. Cooperative occupancy decision making of multi-UAV in beyond-visual-range air combat: a game theory approach[J]. IEEE Access, 2020, 8: 11624-11634. doi: 10.1109/ACCESS.2019.2933022 [2] HEEMIN S, JAEHYUN L, HYUNGI K, et al. An autonomous aerial combat framework for two-on-two engagements based on basic fighter maneuvers[J]. Aerospace Science and Technology, 2018, 72(2): 305-315. [3] 邓海军, 尹全军, 胡记文, 等. 基于MEBN的战术意图识别[J]. 系统工程与电子技术, 2010, 32(11): 2374-2379.DENG H J, YIN Q J, HU J W, et al. Tactical intention recognition based on multi-entity Bayesian network[J]. Systems Engineering and Electronics, 2010, 32(11): 2374-2379(in Chinese). [4] ZHAO J, YANG B. Graph model of group conflict decision making based on grey correlation[J]. Paper Asia, 2019, 2(2): 128-132. [5] LI Q, DIAO Y, GONG Z, et al. Grey language hesitant fuzzy group decision making method based on kernel and grey scale[J]. International Journal of Environmental Research and Public Health, 2018, 15(3): 436-450. doi: 10.3390/ijerph15030436 [6] ZHOU T, CHEN M, WANG Y, et al. Information entropy-based intention prediction of aerial targets under uncertain and incomplete information[J]. Entropy, 2020, 22(3): 279-290. doi: 10.3390/e22030279 [7] QINGXIAN W U, CHEN S, LIU Z, et al. Prediction of unmanned aerial vehicle target intention under incomplete information[J]. Scientia Sinica Informationis, 2020, 50(5): 704-717. doi: 10.1360/SSI-2019-0106 [8] AHMED A A, MOHAMMED M F. SAIRF: A similarity approach for attack intention recognition using fuzzy min-max neural network[J]. Journal of Computational Science, 2018, 25(3): 467-473. [9] 周旺旺, 姚佩阳, 张杰勇, 等. 基于深度神经网络的空中目标作战意图识别[J]. 航空学报, 2018, 39(11): 200-208. doi: 10.7527/S1000-6893.2018.22468ZHOU W W, YAO P Y, ZHANG J Y, et al. Combat intention recognition for aerial targets based on deep neural network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(11): 200-208(in Chinese). doi: 10.7527/S1000-6893.2018.22468 [10] LI Y, HAN W, WANG Y. Deep reinforcement learning with application to air confrontation intelligent decision-making of manned/unmanned aerial vehicle cooperative system[J]. IEEE Access, 2020, 8: 67887-67898. doi: 10.1109/ACCESS.2020.2985576 [11] 欧微, 柳少军, 贺筱媛, 等. 基于时序特征编码的目标战术意图识别算法[J]. 指挥控制与仿真, 2016, 38(6): 36-41. doi: 10.3969/j.issn.1673-3819.2016.06.008OU W, LIU S J, HE X Y, et al. Tactical intention recognition algorithm based on encoded temporal features[J]. Command Control & Simulation, 2016, 38(6): 36-41(in Chinese). doi: 10.3969/j.issn.1673-3819.2016.06.008 [12] WANG H, WANG L, YU Q, et al. Online reliability prediction via motifs-based dynamic Bayesian networks for service-oriented systems[J]. IEEE Transactions on Software Engineering, 2017, 43(6): 556-579. doi: 10.1109/TSE.2016.2615615 [13] CARLO C, FATEMWH V, PETER C. Bayesian network hybrid learning using an elite-guided genetic algorithm[J]. Artificial Intelligence Review, 2019, 52(1): 245-272. doi: 10.1007/s10462-018-9615-5 [14] SIQI N, MENG Z, QIANG J. The deep regression Bayesian network and its applications: Probabilistic deep learning for computer vision[J]. IEEE Signal Processing Magazine, 2018, 35(1): 101-111. doi: 10.1109/MSP.2017.2763440 [15] CHOI A, WANG R, DARWICHE A. On the relative expressiveness of Bayesian and neural networks[J]. International Journal of Approximate Reasoning, 2019, 113: 303-323. doi: 10.1016/j.ijar.2019.07.008 [16] GRUBER A, BEN-GAL I. A targeted Bayesian network learning for classification[J]. Quality Technology & Quantitative Management, 2019, 16(3): 243-261. [17] AJMAL H, MADDEN M G. Dynamic Bayesian network learning to infer sparse models from time series gene expression Data[J]. IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2021, 99(1): 1-12. [18] GEDUK S, ULUSOY L. A practical analysis of sample complexity for structure learning of discrete dynamic Bayesian networks[J]. Optimization, 2022, 71(10): 2935-2962. doi: 10.1080/02331934.2021.1892105 [19] 孟光磊, 张慧敏, 朴海音, 等. 自动化飞行训练评估中的战机机动动作识别[J]. 北京航空航天大学学报, 2020, 46(7): 1267-1274. doi: 10.13700/j.bh.1001-5965.2019.0445MENG G L, ZHANG H M, PIAO H Y, et al. Recognition of fighter maneuver in automatic fight training evaluation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(7): 1267-1274(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0445 [20] HONDA A, JAMES S. Parameter learning and applications of the inclusion-exclusion integral for data fusion and analysis[J]. Information Fusion, 2020, 56: 28-38. doi: 10.1016/j.inffus.2019.10.004 [21] KOVACIC J. Learning parameters of Bayesian networks from datasets with systematically missing data: A meta-analytic approach[J]. Expert Systems with Application, 2020, 141(1): 1-11. [22] WANG D, AMRILJAHARADAK A, XIAO Y. Dynamic knowledge inference based on Bayesian network learning[J]. Mathematical Problems in Engineering, 2020, 2020: 1-9. [23] HU J, QIN H, YAN T, et al. Corrected Bayesian information criterion for stochastic block models[J]. Journal of the American Statistical Association, 2019, 115(532): 1-43. [24] LIAO T F, FASANG A E. Comparing groups of life-course sequences using the Bayesian information criterion and the likelihood-ratio test[J]. Sociological Methodology, 2021, 51(1): 44-85. doi: 10.1177/0081175020959401 [25] POIRION F. Monte Carlo approach for fatigue and damage calculation of nonlinear dynamical systems[J]. PAMM, 2015, 1(1): 460-461. [26] RAHRAH M, VERMOLEN F. Monte Carlo assessment of the impact of oscillatory and pulsating boundary conditions on the flow through porous media[J]. Transport in Porous Media, 2018, 123: 125-146. doi: 10.1007/s11242-018-1028-z -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 557
- HTML全文浏览量: 112
- PDF下载量: 77
- 被引次数: 0
