



-
摘要:
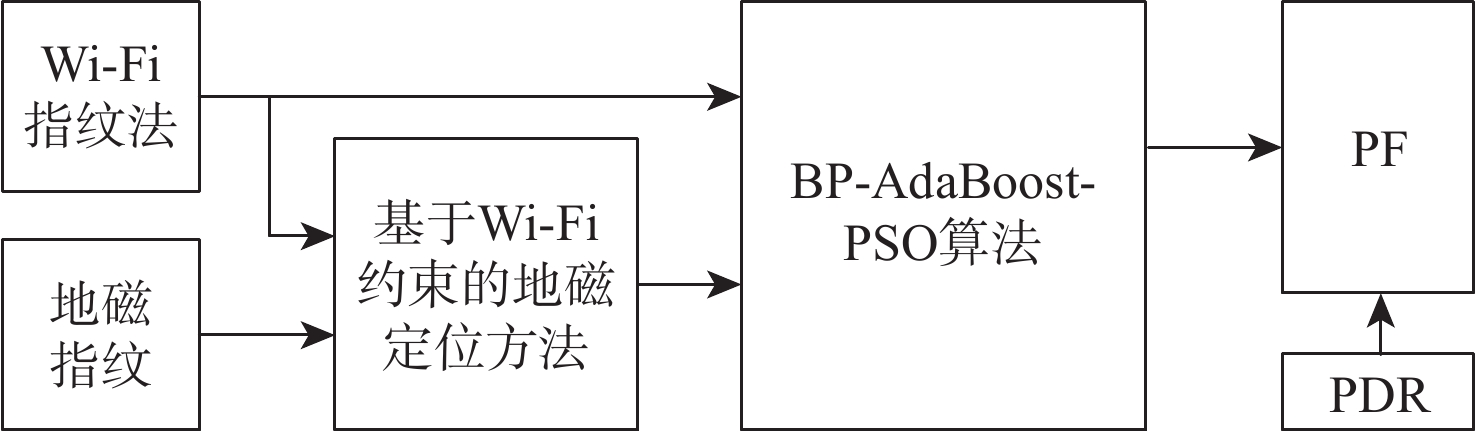
为实现复杂室内环境下行人的精确连续定位,提出一种基于分层优化的多源融合定位方法。先利用Wi-Fi定位结果约束地磁匹配范围,再将粒子群优化(PSO)引入BP-AdaBoost集成学习算法,利用优化后的BP-AdaBoost-PSO算法融合Wi-Fi定位结果与约束后的地磁匹配定位结果。最后利用粒子滤波(PF)实现上述融合结果与行人航位推算(PDR)结果的融合定位。仿真结果表明:所提方法能够有效提升行人运动状态下的连续定位精度,并具有较好的鲁棒性。
Abstract:To achieve accurate and continuous pedestrian positioning in complex indoor environments, we propose a multi-source fusion positioning algorithm based on hierarchical optimization is proposed. First, the geomagnetic matching range is constrained with the Wi-Fi positioning result. Afterwards, particle swarm optimization (PSO) is adopted to optimize the BP-AdaBoost ensemble learning algorithm. The optimized BP-AdaBoost-PSO is employed to fuse the Wi-Fi and the constrained geomagnetic positioning results. Particle filter (PF) is then applied to fuse the above fusion result and the pedestrian dead reckoning (PDR) result. Simulation results indicate that the proposed algorithm has sufficient robustness and can effectively improve the continuous positioning accuracy in a pedestrian motion state.
-
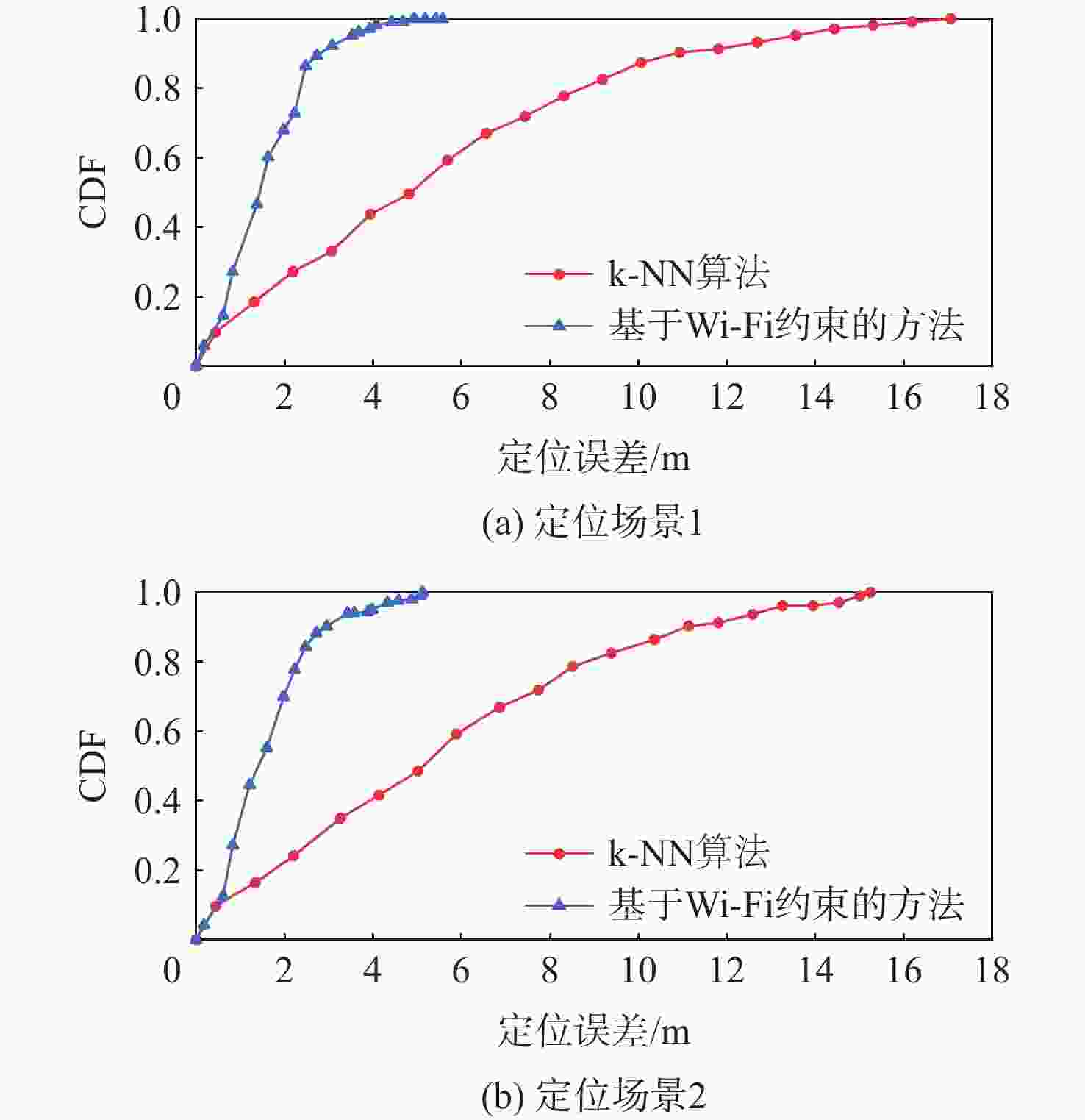
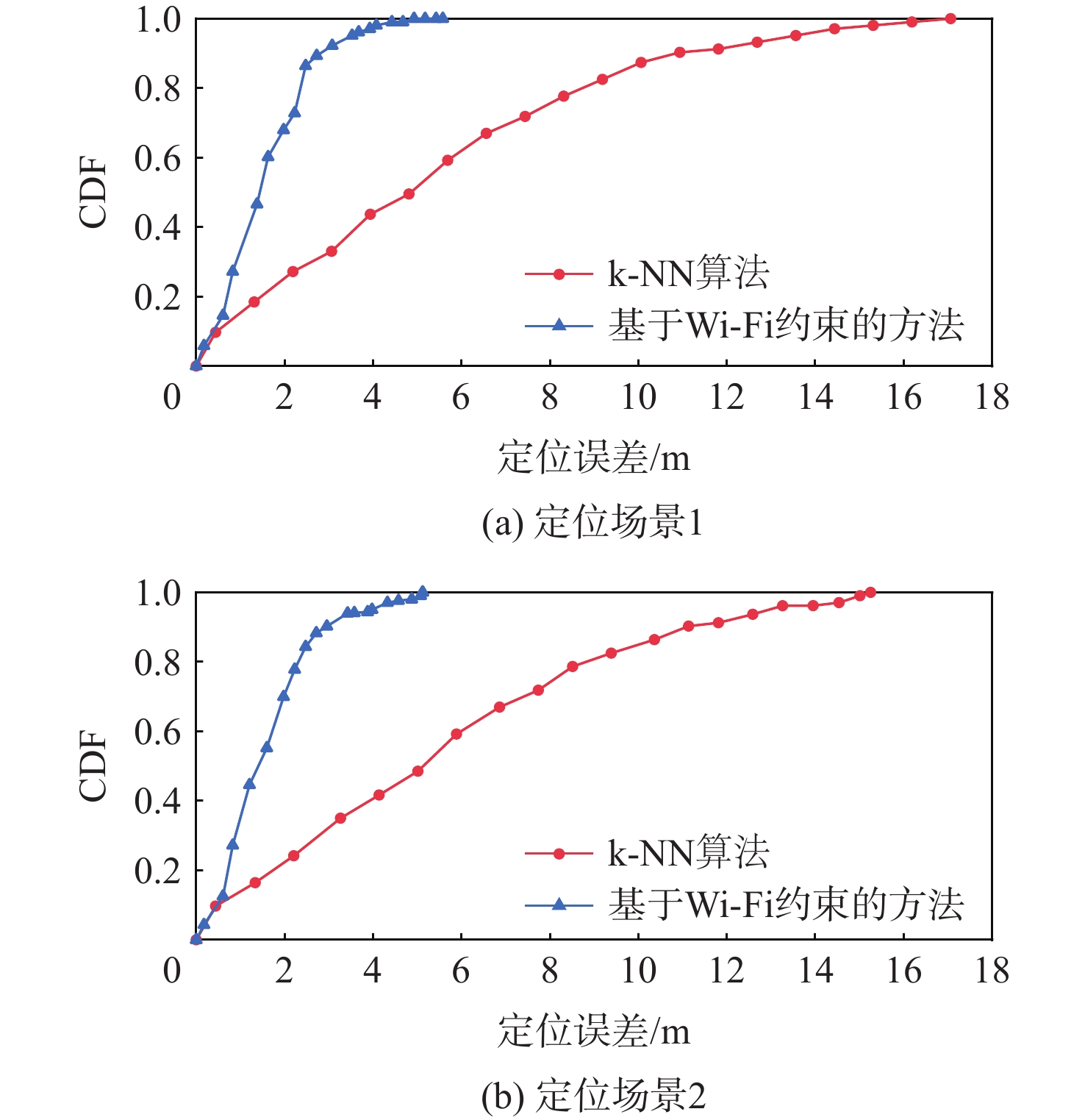
图 7 不同地磁定位方法定位误差的CDF曲线
Figure 7. CDF curves of position errors with different geomagnetic positioning algorithm

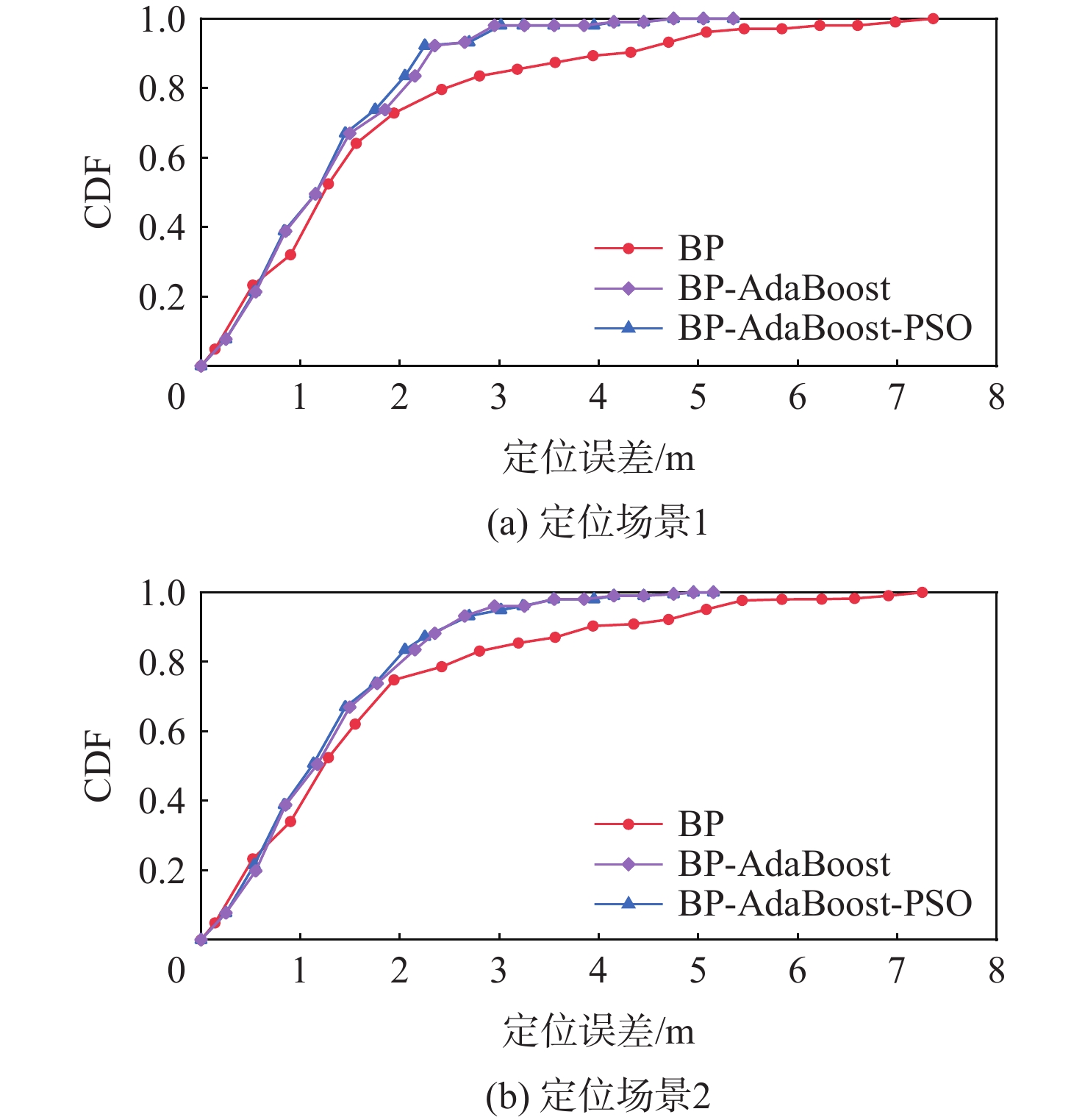
图 8 神经网络融合算法定位误差的CDF曲线
Figure 8. CDF curves of position errors of neural network fusion algorithms
表 1 不同地磁定位方法的平均定位误差
Table 1. Average position errors of different geomagnetic positioning algorithms
m 定位法 平均定位误差 定位场景1 定位场景2 k-NN算法 7.41 7.32 基于Wi-Fi约束的方法 2.04 1.97  下载: 导出CSV
下载: 导出CSV
表 2 神经网络融合算法的平均定位误差
Table 2. Average position errors of neural network fusion algorithms
m 定位法 平均定位误差 定位场景1 定位场景2 BP 1.85 1.83 BP-AdaBoost 1.73 1.68 BP-AdaBoost-PSO 1.71 1.66
下载: 导出CSV
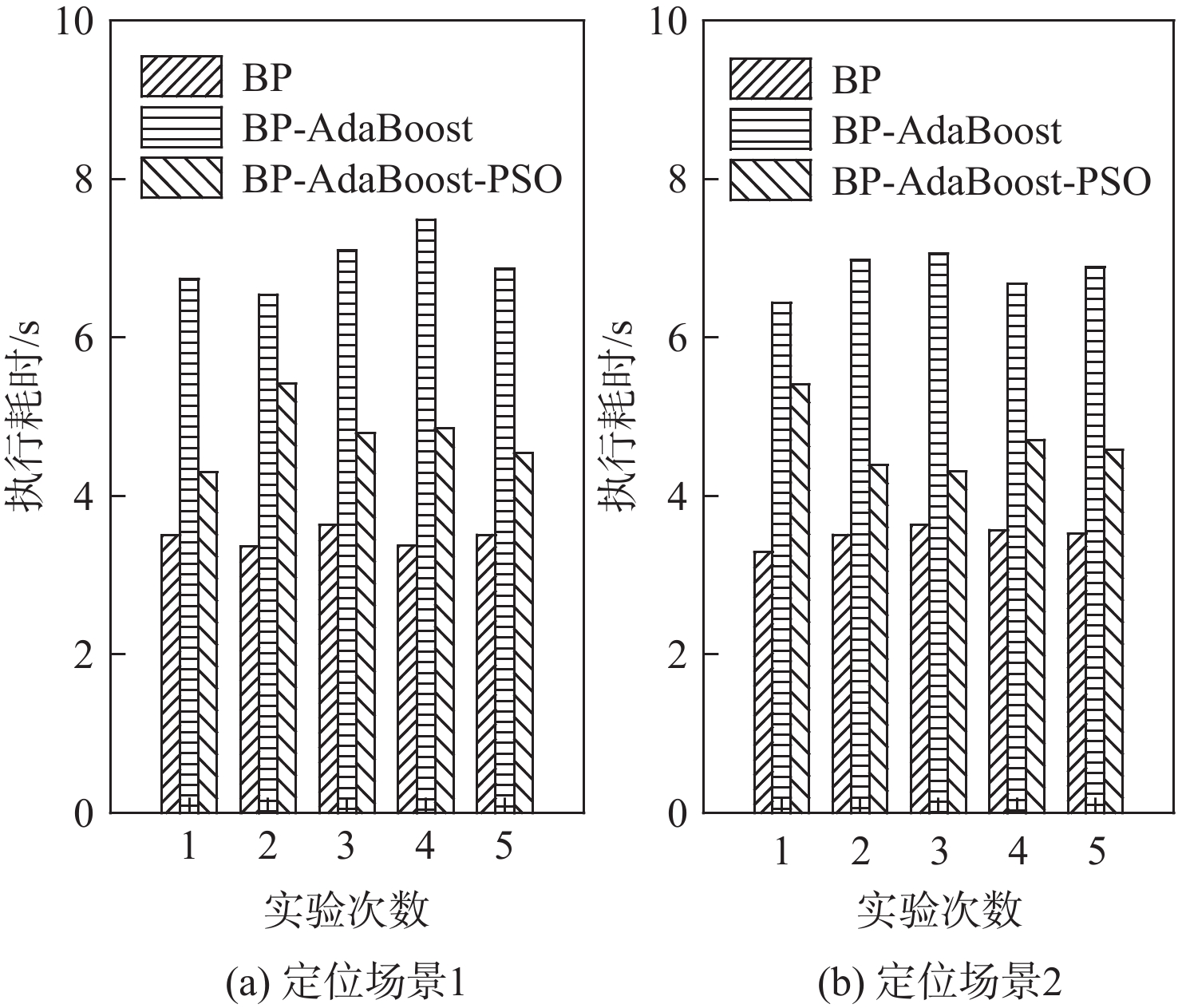
表 3 平均执行耗时
Table 3. Average execution time
s 定位算法 平均执行耗时 定位场景1 定位场景2 BP 3.48 3.46 BP-AdaBoost 6.88 6.89 BP-AdaBoost-PSO 4.91 4.90
下载: 导出CSV
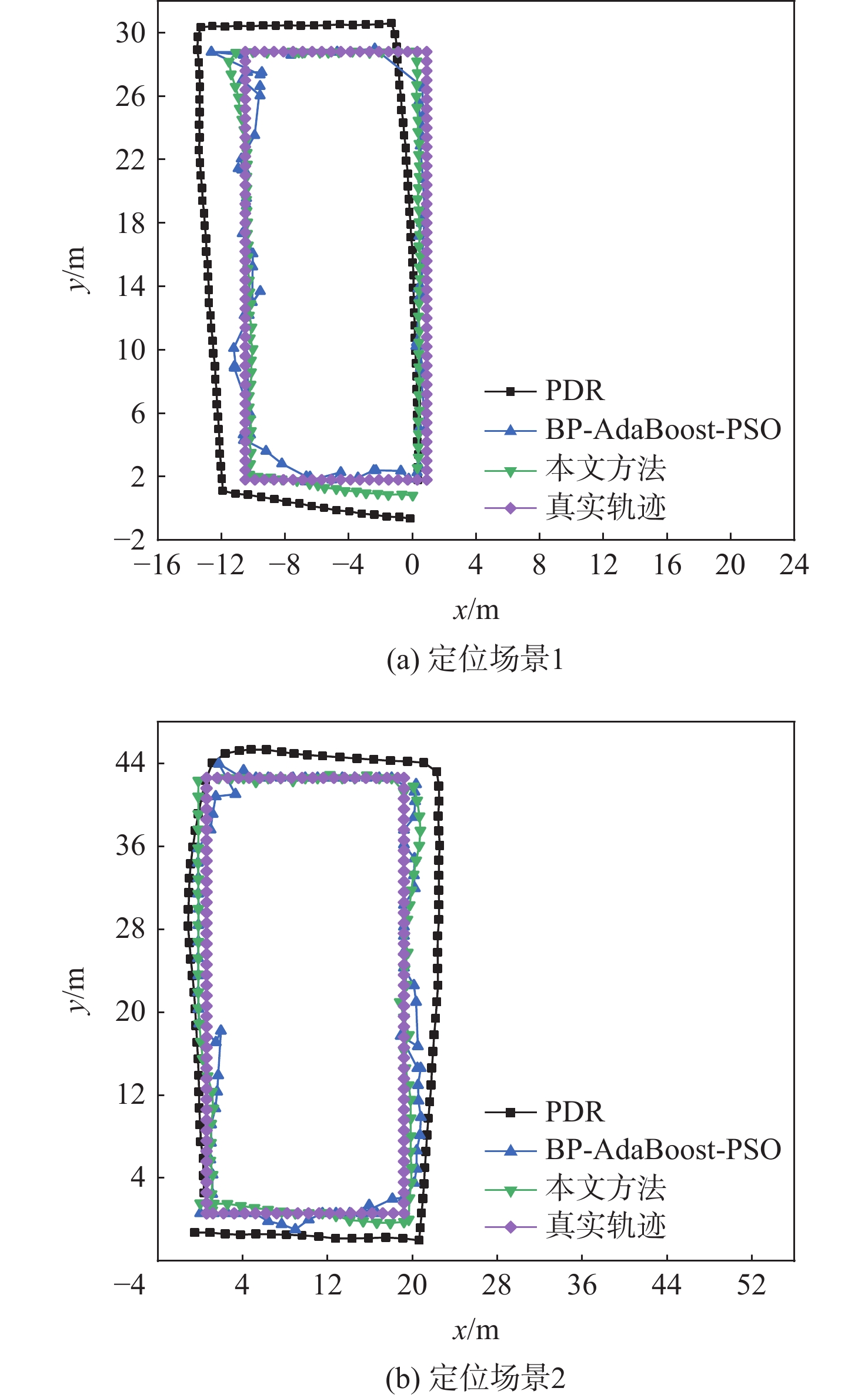
表 4 融合定位的平均定位误差
Table 4. Average position errors of fusion positioning algorithms
m 定位法 平均定位误差 定位场景1 定位场景2 PDR 2.56 2.61 BP-AdaBoost-PSO 1.71 1.66 本文方法 1.27 1.25
下载: 导出CSV
-
[1] ZEKAVAT S, BUEHRER R M, DURGIN G D, et al. An overview on position location: Past, present, future[J]. International Journal of Wireless Information Networks, 2021, 28(1): 45-76. doi: 10.1007/s10776-021-00504-z [2] 陈锐志, 陈亮. 基于智能手机的室内定位技术的发展现状和挑战[J]. 测绘学报, 2017, 46(10): 1316-1326. doi: 10.11947/j.AGCS.2017.20170383CHEN R Z, CHEN L. Indoor positioning with smartphones: The state-of-the-art and the challenges[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1316-1326(in Chinese). doi: 10.11947/j.AGCS.2017.20170383 [3] ASHRAF I, HUR S, PARK Y. Smartphone sensor based indoor positioning: Current status, opportunities, and future challenges[J]. Electronics, 2020, 9(6): 891-919. doi: 10.3390/electronics9060891 [4] ROY P, CHOWDHURY C. A survey of machine learning techniques for indoor localization and navigation systems[J]. Journal of Intelligent & Robotic Systems, 2021, 101(3): 1-34. [5] MAGRIN C E, BRITO R C, TODT E. A systematic mapping study on multi-sensor fusion in wheeled mobile robot self-localization[C]//2019 Latin American Robotics Symposium, 2019 Brazilian Symposium on Robotics and 2019 Workshop on Robotics in Education. Piscataway: IEEE Press, 2020: 132-137. [6] YU C Y, EL-SHEIMY N, LAN H Y, et al. Map-based indoor pedestrian navigation using an auxiliary particle filter[J]. Micromachines, 2017, 8(7): 225-240. doi: 10.3390/mi8070225 [7] LI Y, ZHUANG Y, ZHANG P, et al. An improved inertial/WiFi/magnetic fusion structure for indoor navigation[J]. Information Fusion, 2017, 34: 101-119. doi: 10.1016/j.inffus.2016.06.004 [8] 张立志, 陈殿生, 刘维惠. 基于混合地图的护理机器人室内导航方法[J]. 北京航空航天大学学报, 2018, 44(5): 991-1000. doi: 10.13700/j.bh.1001-5965.2017.0325ZHANG L Z, CHEN D S, LIU W H. Care robot indoor navigation method based on hybrid map[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(5): 991-1000(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0325 [9] ASHRAF I, HUR S, PARK Y. Application of deep convolutional neural networks and smartphone sensors for indoor localization[J]. Applied Sciences, 2019, 9(11): 2337. doi: 10.3390/app9112337 [10] 徐岩, 李宁宁. 双层PSO-ELM融合室内定位算法[J]. 天津大学学报(自然科学与工程技术版), 2021, 54(1): 61-68.XU Y, LI N N. Double-layer PSO-ELM fusion indoor positioning algorithm[J]. Journal of Tianjin University (Science and Technology), 2021, 54(1): 61-68(in Chinese). [11] LIU S. Multi-sensor data fusion algorithm based on BP neural network[J]. Journal of Physics:Conference Series, 2020, 1584(1): 012025. doi: 10.1088/1742-6596/1584/1/012025 [12] FREUND Y. Experiment with a new boosting algorithm[C]//Machine Learning: Proceedings of the Thirteenth International Conference. San Francisco: Margan Kaufmann, 1996: 148-156. [13] FRESNO J M, ROBLES G, MARTÍNEZ-TARIFA J M, et al. Survey on the performance of source localization algorithms[J]. Sensors, 2017, 17(11): 2666-2690. doi: 10.3390/s17112666 [14] WANG Y, ZHAO H D. Improved smartphone-based indoor pedestrian dead reckoning assisted by visible light positioning[J]. IEEE Sensors Journal, 2019, 19(8): 2902-2908. doi: 10.1109/JSEN.2018.2888493 [15] 刘飞. 多传感器融合的高精度无缝定位模型与方法研究[D]. 徐州: 中国矿业大学, 2020: 74-76.LIU F. Research on high precision seamless positioning model and method based on multi-sensor fusion[D]. Xuzhou: China University of Mining and Technology, 2020: 74-76(in Chinese). [16] WEINBERG H. Using the ADXL202 in pedometer and personal navigation applications[EB/OL]. (2021-05-30) [2021-07-01]. https://www.analog.com/media/en/technical-documentation/application-notes/513772624AN602.pdf. [17] 侯秀丽, 徐宝国, 周颖, 等. 基于GPS/INS/磁力计多传感器融合的连续定位[J]. 传感技术学报, 2020, 33(9): 1320-1326. doi: 10.3969/j.issn.1004-1699.2020.09.015HOU X L, XU B G, ZHOU Y, et al. Continuous positioning based on multi-sensor fusion of GPS/INS/magnetometer[J]. Chinese Journal of Sensors and Actuators, 2020, 33(9): 1320-1326(in Chinese). doi: 10.3969/j.issn.1004-1699.2020.09.015 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 386
- HTML全文浏览量: 67
- PDF下载量: 37
- 被引次数: 0
