



Bi-bandwidth extended state observer based disturbance rejection control method and its application on UAV
-
摘要:
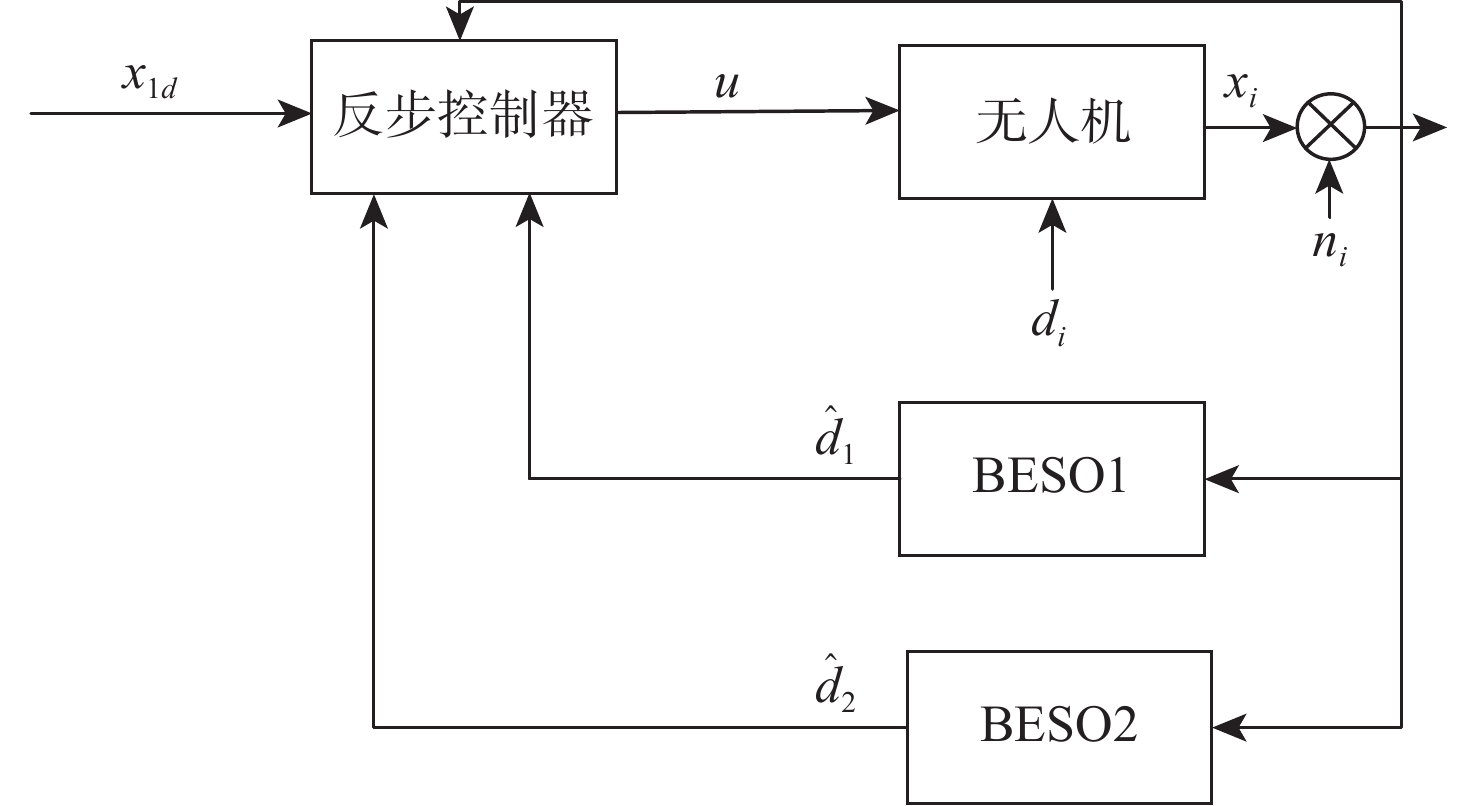
针对实际系统中普遍存在的非匹配快变扰动和量测噪声问题,提出了一种基于双频扩张状态观测器(BESO)的反步抗扰控制方法。双频扩张状态观测器通过方向转换因子和双带宽比例因子调整观测器的带宽,在准确估计快变扰动的同时可避免放大量测噪声。在此基础上结合反步控制,形成一种逐级补偿的控制结构,通过Lyapunov方法设计了控制律,可保证系统对非匹配扰动的渐进稳定。针对工程应用,进一步给出了控制器参数调节的建议。将所提控制律应用于微型四旋翼无人机的定高控制,仿真结果验证了其补偿非匹配扰动和抑制量测噪声方面的有效性。
Abstract:This paper addresses the problem of the fast time-varying mismatch disturbance and measurement noise that inevitably exist in actual control systems, proposing a backstepping disturbance rejection control method based on the bi-bandwidth extended state observer (BESO). The BESO adjusts the bandwidth of the observer through a direction switching operator and a bi-bandwidth scaling factor. Therefore, it can accurately estimate the fast time-varying disturbance while avoiding the amplification of measurement noise. Then the backstepping control is combined with the BESO to form a step-by-step compensation control scheme, and the corresponding control law is given through the Lyapunov approach to ensure the asymptotic stability of the system for the mismatch disturbance. Suggestions for the parameter tuning process are given for engineering practice. In the end, the proposed approach is applied to the height control of a quadrotor micro-UAV. The results verify its effectiveness in the mismatch disturbance compensation and measurement noise suppression.
-

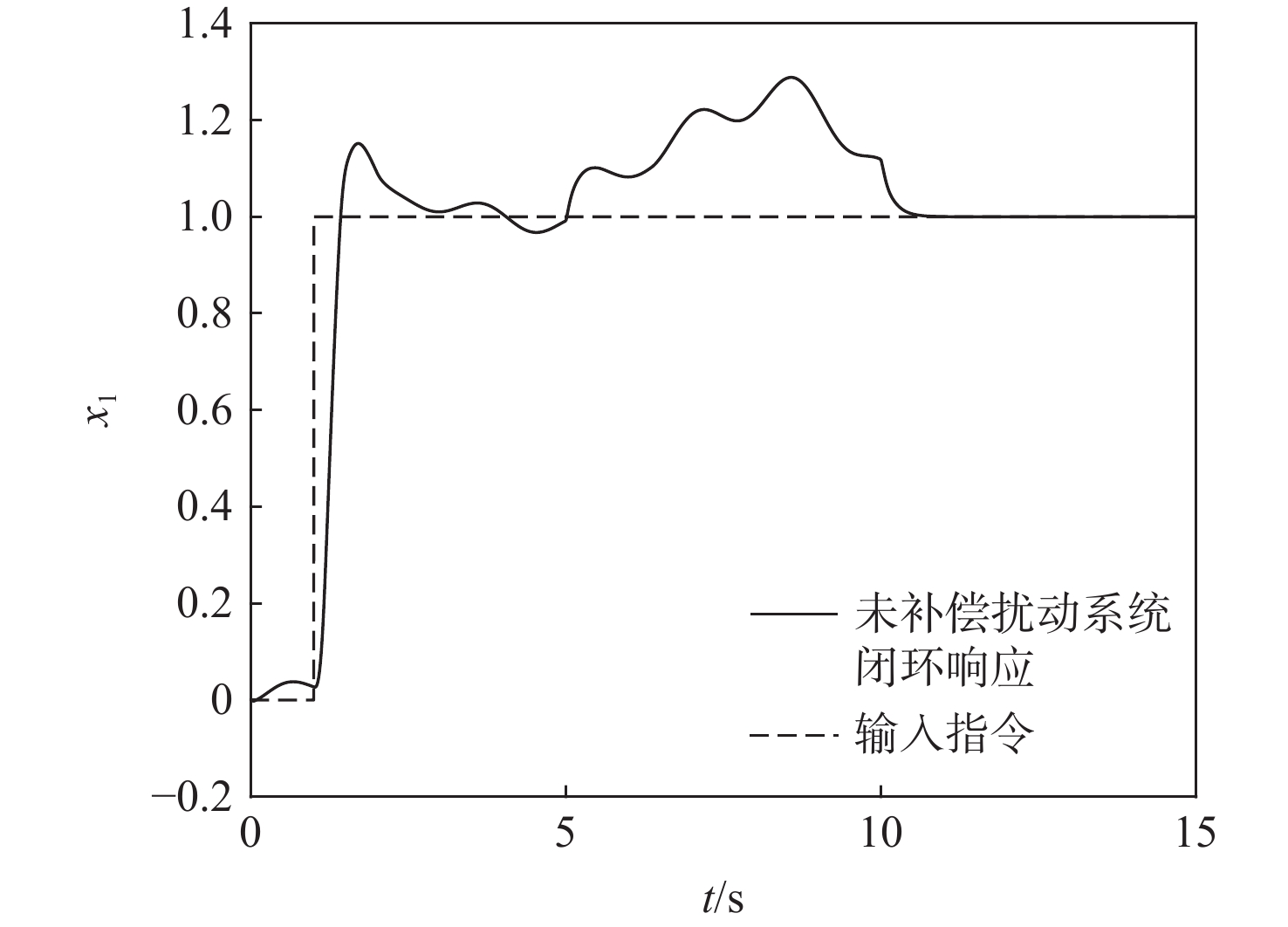
图 5 未补偿扰动的反步法闭环响应
Figure 5. Closed-loop response of backstepping controller without disturbance compensation
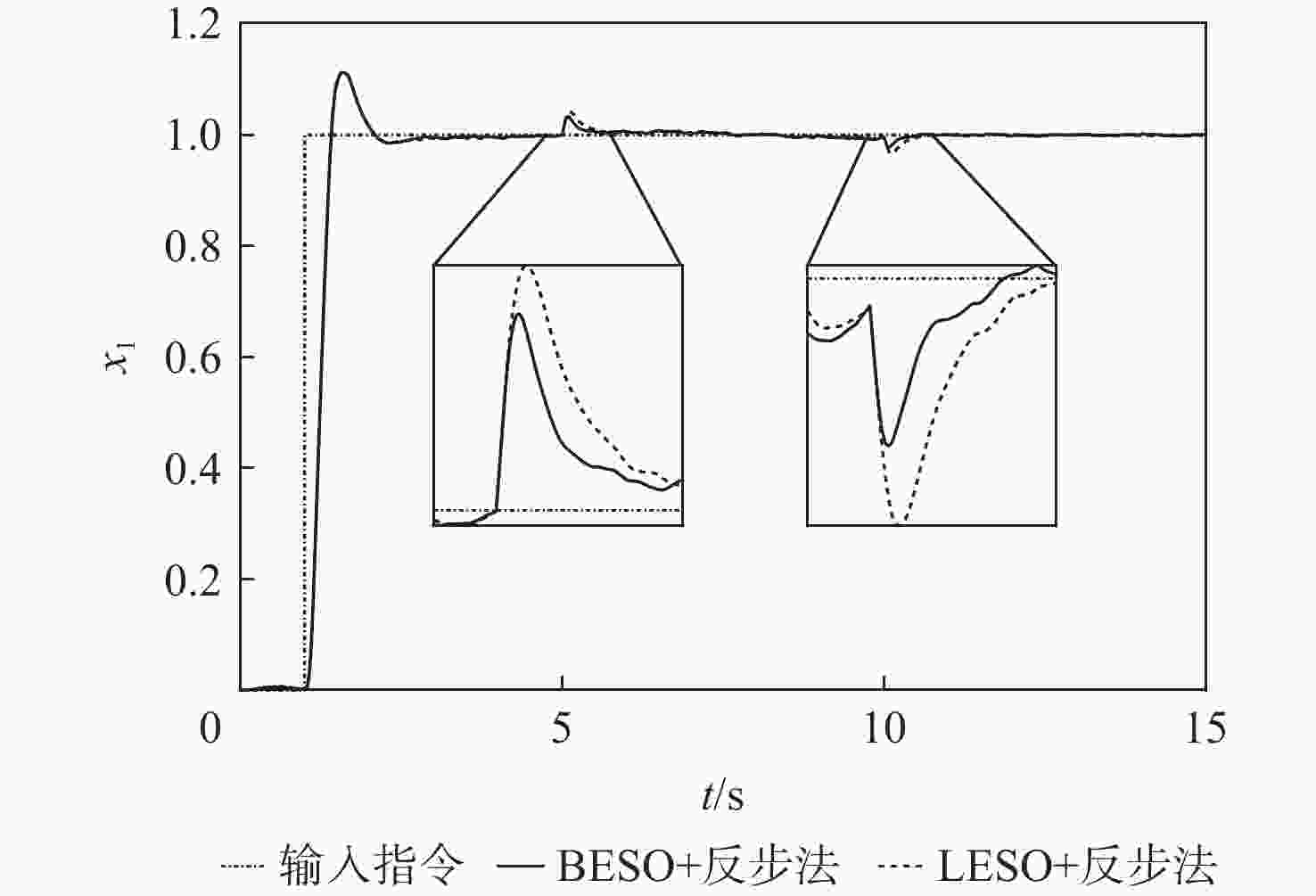
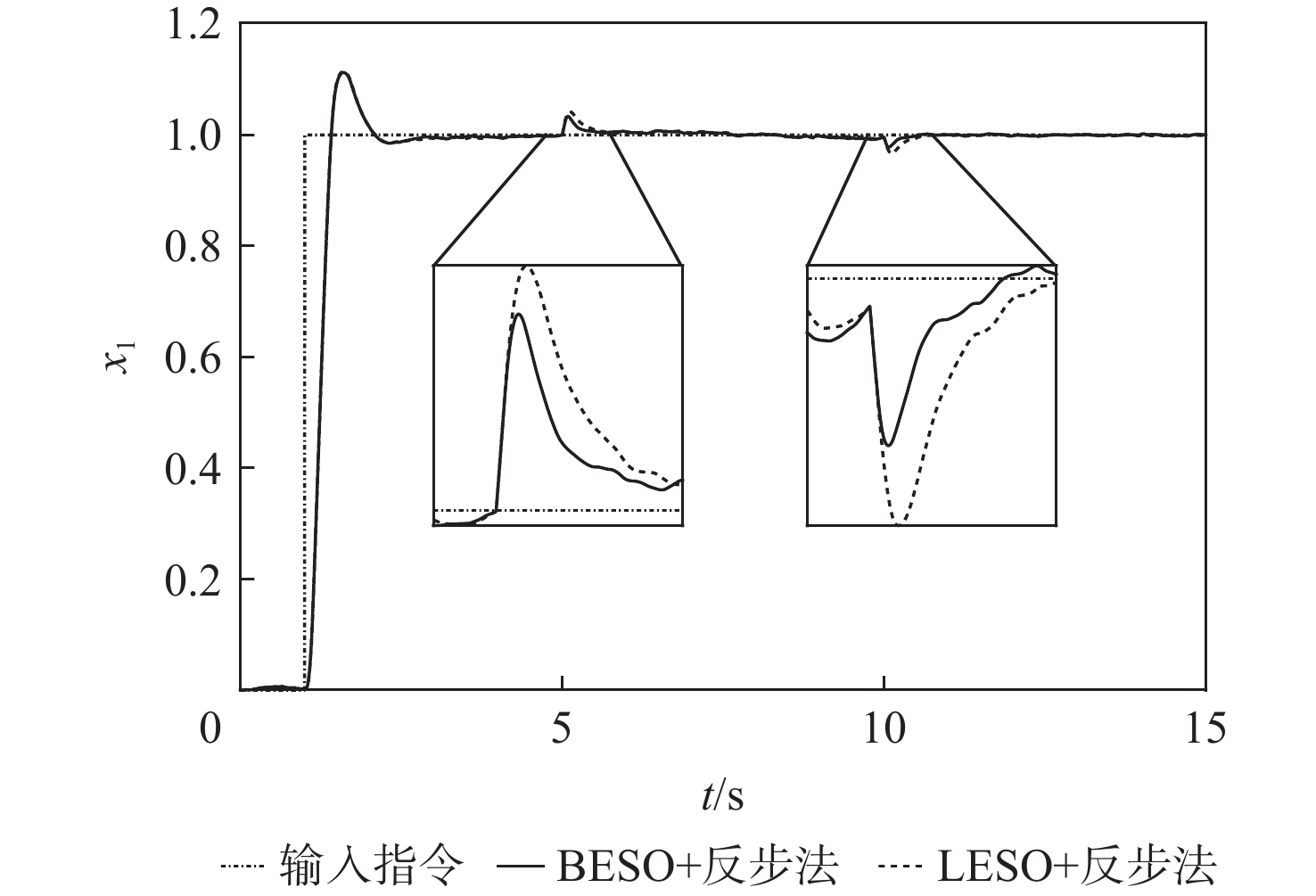
图 6 补偿扰动的反步法闭环响应
Figure 6. Closed-loop responses of two backstepping disturbance compensation
表 1 BESO与LESO估计
${d_1}, {d_2}$ 性能指标Table 1. Performance indexes of BESO and LESO on
${d_1}$ 估计 ${J_1}$ ${J_2}$ ${J_3}$ $\dfrac{J_{1{\rm{LESO} } } }{J_{1{\rm{BESO} } } }$/% $\dfrac{J_{2{\rm{LESO} } } }{J_{2{\rm{BESO} } } }$/% $\dfrac{J_{3{\rm{LESO} } } }{J_{3{\rm{BESO} } } }$/% BESO LESO BESO LESO BESO LESO d1 0.210 0.241 0.233 0.256 0.163 0.211 114.8 109.9 129.4 d2 0.5883 0.7589 0.6893 0.9180 0.3866 0.4410 129.0 133.2 114.1  下载: 导出CSV
下载: 导出CSV
表 2 BESO与LESO实际输入性能指标
Table 2. Performance indexes of BESO and LESO on actual input
J4 $\dfrac{J_{4{\rm{LESO}}}}{J_{4{\rm{BESO}}}} $/% BESO LESO 1.6873 2.2236 131.8
下载: 导出CSV
-
[1] 李菁菁, 任章, 沈振. 高超声速滑翔飞行器的分散鲁棒姿态控制[J]. 北京航空航天大学学报, 2012, 38(9): 1194-1199. doi: 10.13700/j.bh.1001-5965.2012.09.017LI J J, REN Z, SHEN Z. Design of decentralized robust attitude controller for hypersonic sliding vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(9): 1194-1199(in Chinese). doi: 10.13700/j.bh.1001-5965.2012.09.017 [2] 李磊, 任元, 陈晓岑, 等. 基于ADRC和RBF神经网络的MSCSG控制系统设计[J]. 北京航空航天大学学报, 2020, 46(10): 1966-1972. doi: 10.13700/j.bh.1001-5965.2019.0536LI L, REN Y, CHEN X C, et al. Design of MSCSG control system based on ADRC and RBF neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1966-1972(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0536 [3] MIAO C X, FANG J C, SUN D S, et al. The control method within wind disturbance for MAV based on nonlinear model[C]//Proceedings of the 30th Chinese Control Conference. Piscataway: IEEE Press, 2011: 3896-3901. [4] 韩京清. 自抗扰控制技术—估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 197-199.HAN J Q. Active disturbance rejection control technique—the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 197-199(in Chinese). [5] ZHANG J, YANG X K, YANG L Y. Virtual-command-based model reference adaptive control for abrupt structurally damaged aircraft[J]. Aerospace Science and Technology, 2018, 78: 452-460. doi: 10.1016/j.ast.2018.04.043 [6] TALOLE S E, KOLHE J P, PHADKE S B. Extended-state-observer-based control of flexible-joint system with experimental validation[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1411-1419. doi: 10.1109/TIE.2009.2029528 [7] LI B, HU Q L, YANG Y S. Continuous finite-time extended state observer based fault tolerant control for attitude stabilization[J]. Aerospace Science and Technology, 2019, 84: 204-213. doi: 10.1016/j.ast.2018.10.006 [8] HE T F, WU Z. Extended disturbance observer with measurement noise reduction for spacecraft attitude stabilization[J]. IEEE Access, 2019, 7: 66137-66147. doi: 10.1109/ACCESS.2019.2918076 [9] XUE W C, BAI W Y, YANG S, et al. ADRC with adaptive extended state observer and its application to air-fuel ratio control in gasoline engines[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5847-5857. doi: 10.1109/TIE.2015.2435004 [10] RSETAM K, CAO Z W, MAN Z H. Cascaded-extended state-observer-based sliding-mode control for underactuated flexible joint robot[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10822-10832. doi: 10.1109/TIE.2019.2958283 [11] PRASOV A A, KHALIL H K. A nonlinear high-gain observer for systems with measurement noise in a feedback control framework[J]. IEEE Transactions on Automatic Control, 2013, 58(3): 569-580. doi: 10.1109/TAC.2012.2218063 [12] JO N H, JEON C, SHIM H. Noise reduction disturbance observer for disturbance attenuation and noise suppression[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1381-1391. doi: 10.1109/TIE.2016.2618858 [13] TAMHANE B, KURODE S, BANDYOPADHYAY B. Novel higher order sliding mode observer for output noise attenuation[C]// 2018 15th International Workshop on Variable Structure Systems (VSS). Piscataway: IEEE Press, 2018: 297-302. [14] SUN J L, PU Z Q, YI J Q, et al. Fixed-time control with uncertainty and measurement noise suppression for hypersonic vehicles via augmented sliding mode observers[J]. IEEE Transactions on Industrial Informatics, 2020, 16(2): 1192-1203. doi: 10.1109/TII.2019.2945861 [15] WANG X H, WANG W C. Nonlinear signal-correction observer and application to UAV navigation[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4600-4607. doi: 10.1109/TIE.2018.2860540 [16] WAN J, MEI C L, QIAN F, et al. Adaptive robust failure compensation control for servo system driven by twin motors[J]. IEEE Access, 2020, 9: 542-550. [17] ZHANG M Y, GUAN Y L, LI Q D, et al. Adaptive nonlinear control for the stabilized platform with disturbance and input saturation[J]. IEEE Access, 2020, 8: 200774-200788. doi: 10.1109/ACCESS.2020.3035601 [18] YANG L Y, LIU L L, ZHANG J. A bi-bandwidth extended state observer for a system with measurement noise and its application to aircraft with abrupt structural damage[J]. Aerospace Science and Technology, 2021, 114: 106742. doi: 10.1016/j.ast.2021.106742 [19] LIN H, ANTSAKLIS P J. Stability and stabilizability of switched linear systems: A short survey of recent results[C]// 2005 IEEE International Symposium on Intelligent Control & 13th Mediterrean Conference on Control and Automation. Piscataway: IEEE Press, 2006: 24-29. [20] KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River: Prentice Hall, 2002. [21] DAVILA J. Exact tracking using backstepping control design and high-order sliding modes[J]. IEEE Transactions on Automatic Control, 2013, 58(8): 2077-2081. doi: 10.1109/TAC.2013.2246894 -

 下载:
下载:










 点击查看大图
点击查看大图
计量
- 文章访问数: 381
- HTML全文浏览量: 79
- PDF下载量: 41
- 被引次数: 0
