



Intelligent orbit determination based on remote sensing image of ontology knowledge base
-
摘要:
针对遥感图像的自主定轨方法存在图像误匹配和匹配速度慢的问题,基于本体知识库理论提出一种判断遥感图像观测资料有效性的智能推理方法。对遥感信息进行预处理,用于提取特征信息;分析基于图像定轨的知识结构框架,利用本体技术构建相应知识库系统;设计图像模板选择和判误规则,调用推理机进行推理得出观测资料有效性。将所提方法应用于基于图像特征点的卫星自主定轨,验证了方法的可行性。仿真结果表明:所提方法通过图像匹配模板选择和图像判误推理,计算速度提高了59.58%,导航位置精度和速度精度分别提高了10.58%和12.49%,有效提高了卫星自主定轨精度。
Abstract:The autonomous orbit determination method based on remote sensing image has the problems of image mismatch and slow matching speed. Based on ontology knowledge base theory, this paper proposes an intelligent reasoning method for improving the effectiveness of remote sensing image. Firstly, the remote sensing information is preprocessed to extract the feature. Secondly, the knowledge structure framework based on image orbit determination is analyzed, and the corresponding knowledge base system is constructed by ontology. Finally, the image template selection and error judgment rules are designed, and the inference engine is used to deduce the effectiveness of the observational data. This method is applied to autonomous satellite orbit determination simulation based on image feature points. The feasibility of the intelligent reasoning method is verified. The simulation results show that the computation speed is improved by 59.58%, and the navigation position precision and velocity precision are improved by 10.58% and 12.49% respectively. Therefore, the image matching template selection and image error judgment reasoning effectively improve the autonomous satellite orbit determination accuracy.
-
Key words:
- ontology /
- knowledge base /
- remote sensing image /
- image features /
- autonomous orbit determination
-

图 1 存在海岸线的遥感图像及处理后的图像
Figure 1. Remote sensing image with coastline and processed image

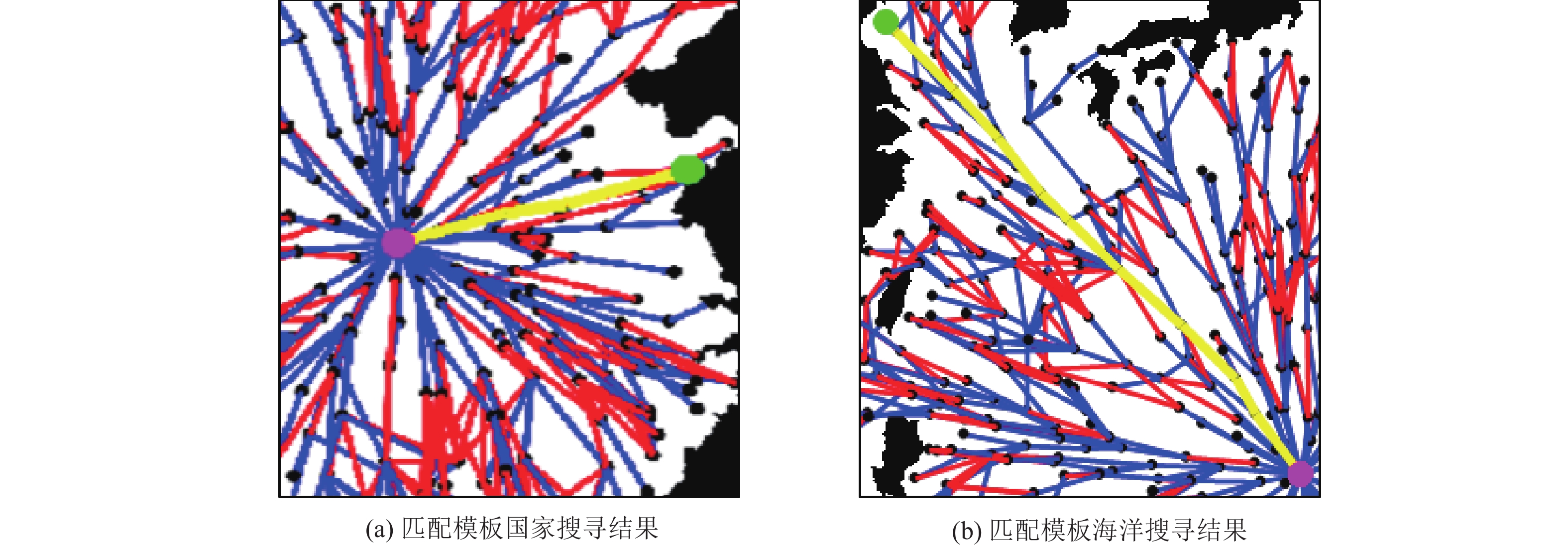
图 2 行政区匹配模板搜寻结果(国家和海洋)
Figure 2. Search results in administrative region matching template (country and ocean)
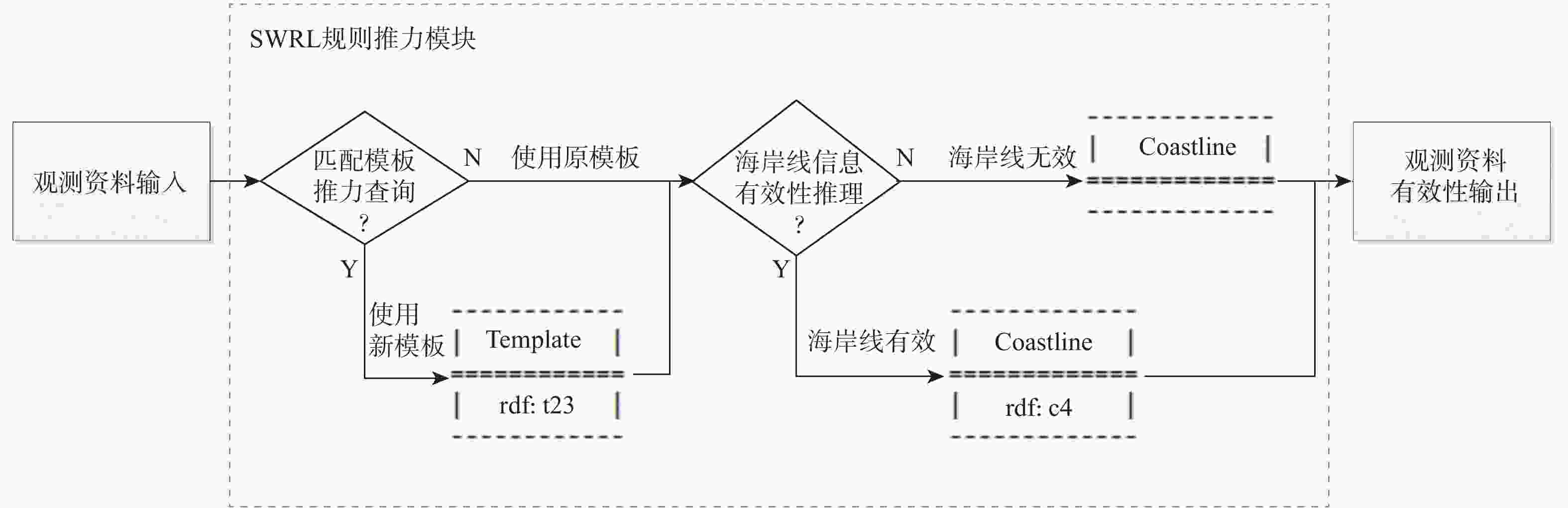
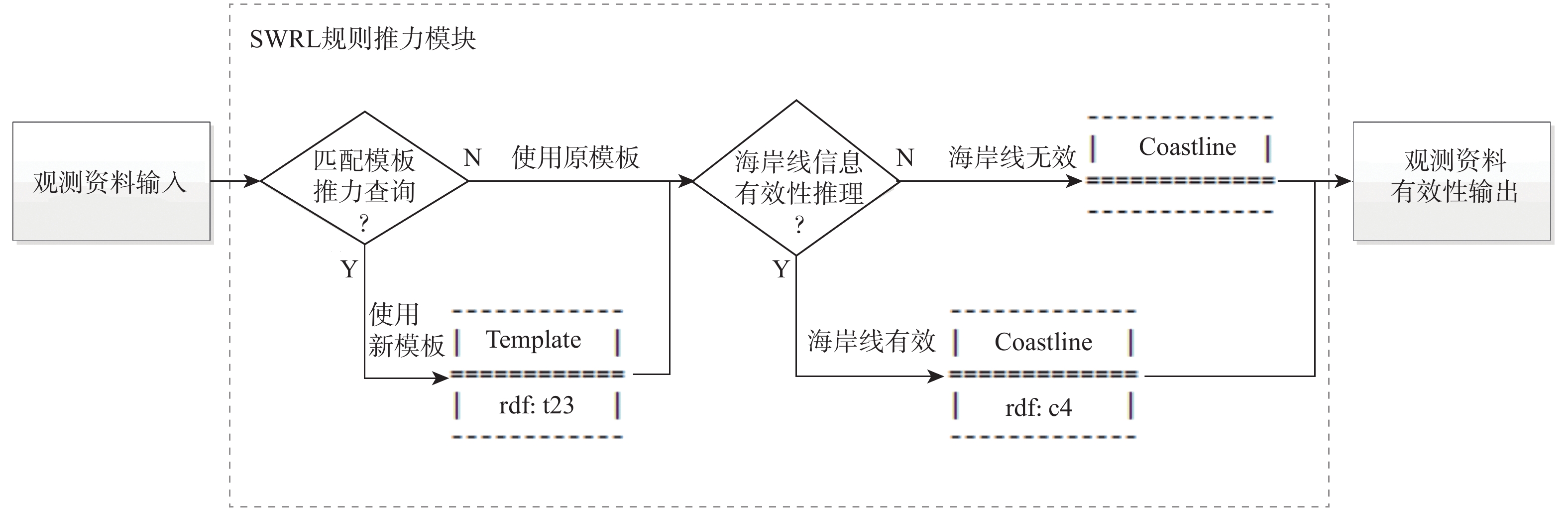
图 4 图像定轨SWRL规则推理查询流程
Figure 4. Flowchart of reasoning and query result based on SWRL rules for image orbit determination
表 1 图像定轨本体模型中的主要类和实例
Table 1. Major classes and individuals in image orbit determination ontology model
类 实例 名称 含义 名称 含义 country 国家 chn 中国 ocean 海洋 pac 太平洋 coastline 海岸线 s1 卫星1 state 状态 s1xyz 卫星1位置 time 时间 sta1 状态1 image 图像 coastline1 海岸线1 template 模板 s1template 当前模板  下载: 导出CSV
下载: 导出CSV
表 2 图像定轨本体模型中的主要属性
Table 2. Major properties in image orbit determination ontology model
对象属性 数据属性 名称 含义 名称 含义 border 相邻 tem 当前模板 notborder 不相邻 ntem 下个模板 far 远 movex x轴移动方向 near 近 right 有效性 madeof1 组成1 x 位置x轴分量 madeof2 组成2 vx 速度x轴分量
下载: 导出CSV
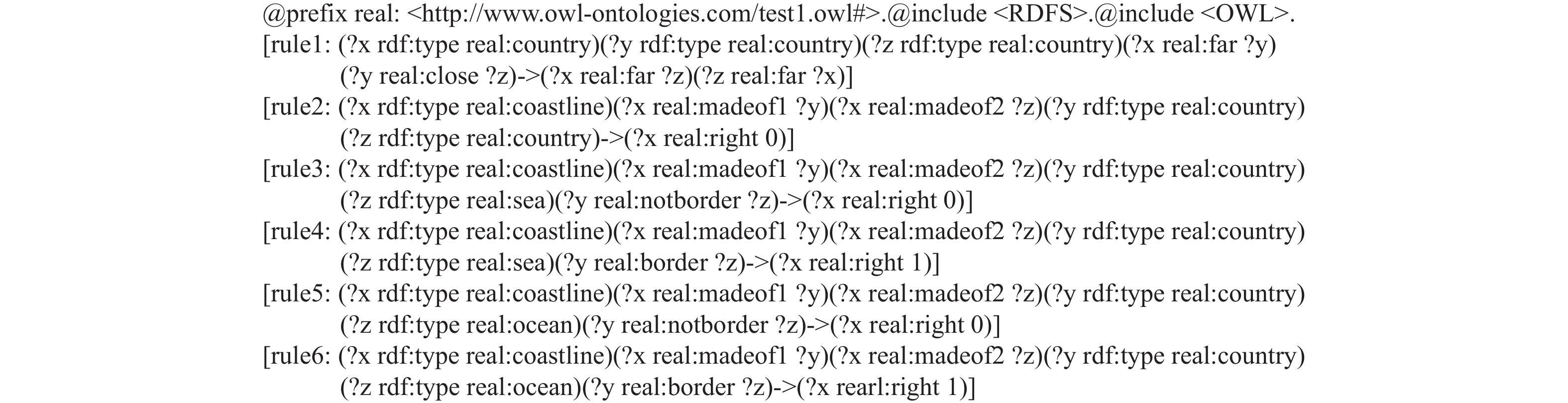
表 4 海岸线特征有效性推理逻辑
Table 4. Reasoning logic of effectiveness of coastline features
编号 海岸线特征有效性推理逻辑 1 如果国家类实例x距离国家类实例y远,实例y距离国家类实例z近,则实例x距离实例z远 2 如果国家类实例x距离海滨类实例y近,实例x距离国家类实例z远,则实例y距离实例z远 3 如果国家类实例x距离海滨类实例y近,实例x距离国家类实例z近,则实例y距离实例z近 4 如果存在海岸线类实例x,其一侧为国家类实例y,另一侧为国家类实例z,则海岸线类实例x的数据属性“right1”为0 5 如果存在海岸线类实例x,其一侧为国家类实例y,另一侧为海洋类实例z,实例y和实例z不相邻,则海岸线类实例x的数据属性“right1”为0 6 如果存在海岸线类实例x,其一侧为国家类实例y,另一侧为海洋类实例z,实例y和实例z相邻,则海岸线类实例x的数据属性“right1”为1 7 如果存在海岸线类实例x,其一侧为国家类实例y,且上一时刻存在海岸线类实例,其一侧为国家类实例z,实例y和实例z距离远,则海岸线类实例x的数据属性“right2”为0 8 如果海岸线类实例x的数据属性“right1”和“right2”均为1,则实例x的数据属性“right”为1,否则为0
下载: 导出CSV
表 3 匹配模板选择推理逻辑
Table 3. Reasoning logic of matching template selection
编号 匹配模板选择推理逻辑 1 如果卫星类实例x的数据属性“vz”大于0,则实例x的数据属性“movey”为1,否则为0 2 如果卫星类实例x的数据属性“vx”和数据属性“vy”的平方和大于地球类实例y的数据属性“w”和数据属性“re”的平方和,则实例x的数据属性“movex”为1,否则为0 3 如果卫星类实例x的数据属性“tem”为a,数据属性“movex”为0,数据属性“movey”为0,则实例x的数据属性“ttem1”为a−1,数据属性“ttem2”为a,数据属性“ttem3”为a+3,数据属性“ttem4”为a+4 4 如果卫星类实例x的数据属性“tem”为a,数据属性“movex”为0,数据属性“movey”为1,则实例x的数据属性“ttem1”为a−5,数据属性“ttem2”为a−4,数据属性“ttem3”为a−1,数据属性“ttem4”为a 5 如果卫星类实例x的数据属性“tem”为a,数据属性“movex”为1,数据属性“movey”为0,则实例x的数据属性“ttem1”为a,数据属性“ttem2”为a+1,数据属性“ttem3”为a+4,数据属性“ttem4”为a+5 6 如果卫星类实例x的数据属性“tem”为a,数据属性“movex”为1,数据属性“movey”为1,则实例x的数据属性“ttem1”为a−4,数据属性“ttem2”为a−3,数据属性“ttem3”为a,数据属性“ttem4”为a+1 7 计算卫星类实例x的当前位置状态到各匹配模板中心点的距离,距离最小对应的模板为当前时刻的匹配主模板
下载: 导出CSV
表 5 卫星仿真初始条件
Table 5. Initial conditionsand errors of satellite simulation
$ x/{\text{m}} $ $ y/{\text{m}} $ $ z{\text{/m}} $ ${v_x}/({\text{m} } \cdot { {\text{s} }^{ - 1} })$ ${v_y}/({\text{m} } \cdot { {\text{s} }^{ - 1} })$ ${v_z}/({\text{m} } \cdot { {\text{s} }^{ - 1} } )$ 6503836.116 1331566.914 4265320.978 1228.832 3904.867 6571.204
下载: 导出CSV
表 6 卫星仿真误差
Table 6. Error of satellite simulation
位置/
m速度/
(m·s−1)地标位置/
m相机焦距/
m姿态指向精度/
(°)图像匹配/
pix100 0.1 10 $ 1 \times {10^{ - 5}} $ $ 1 \times {10^{ - 5}} $ 0.01
下载: 导出CSV
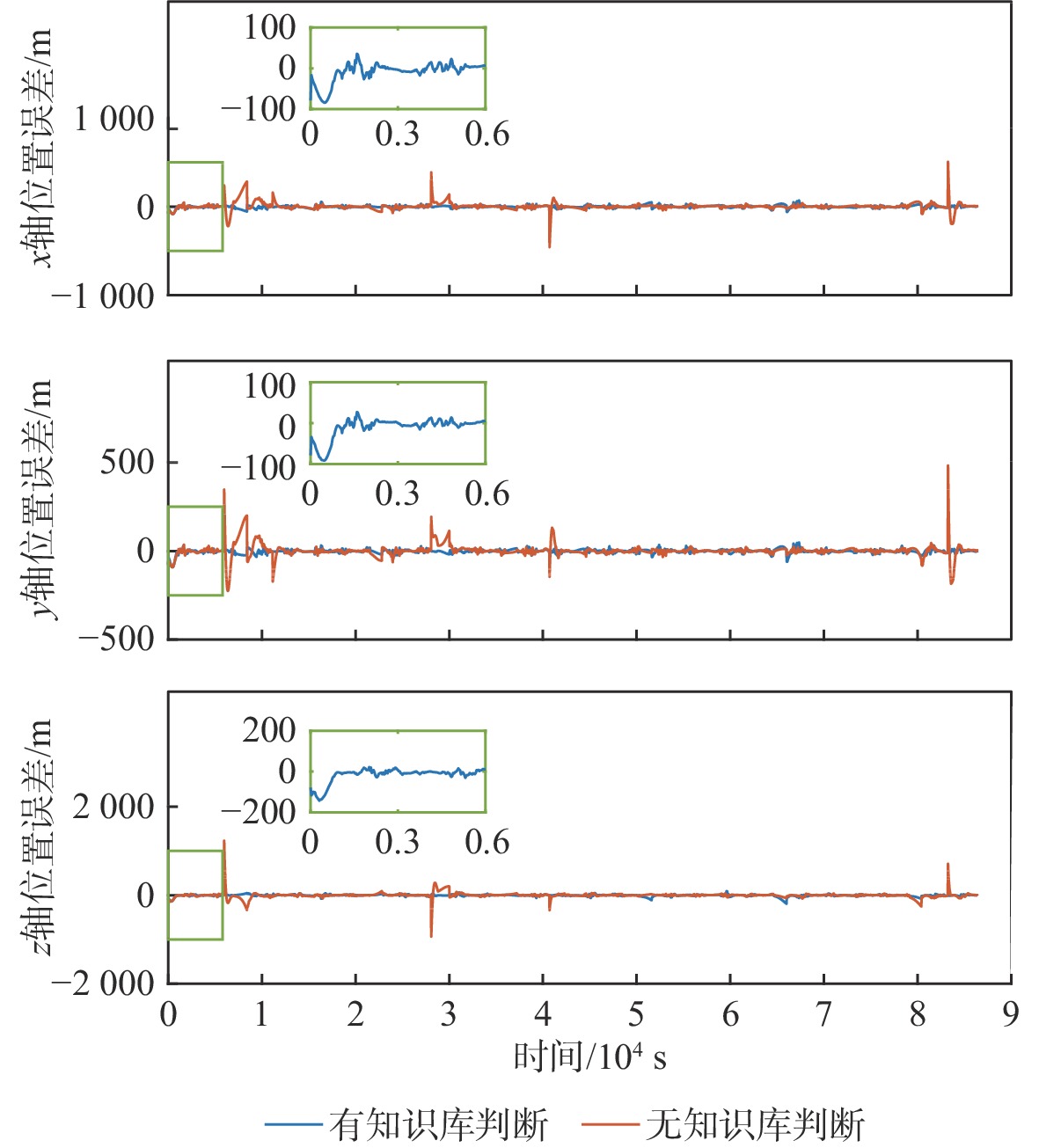
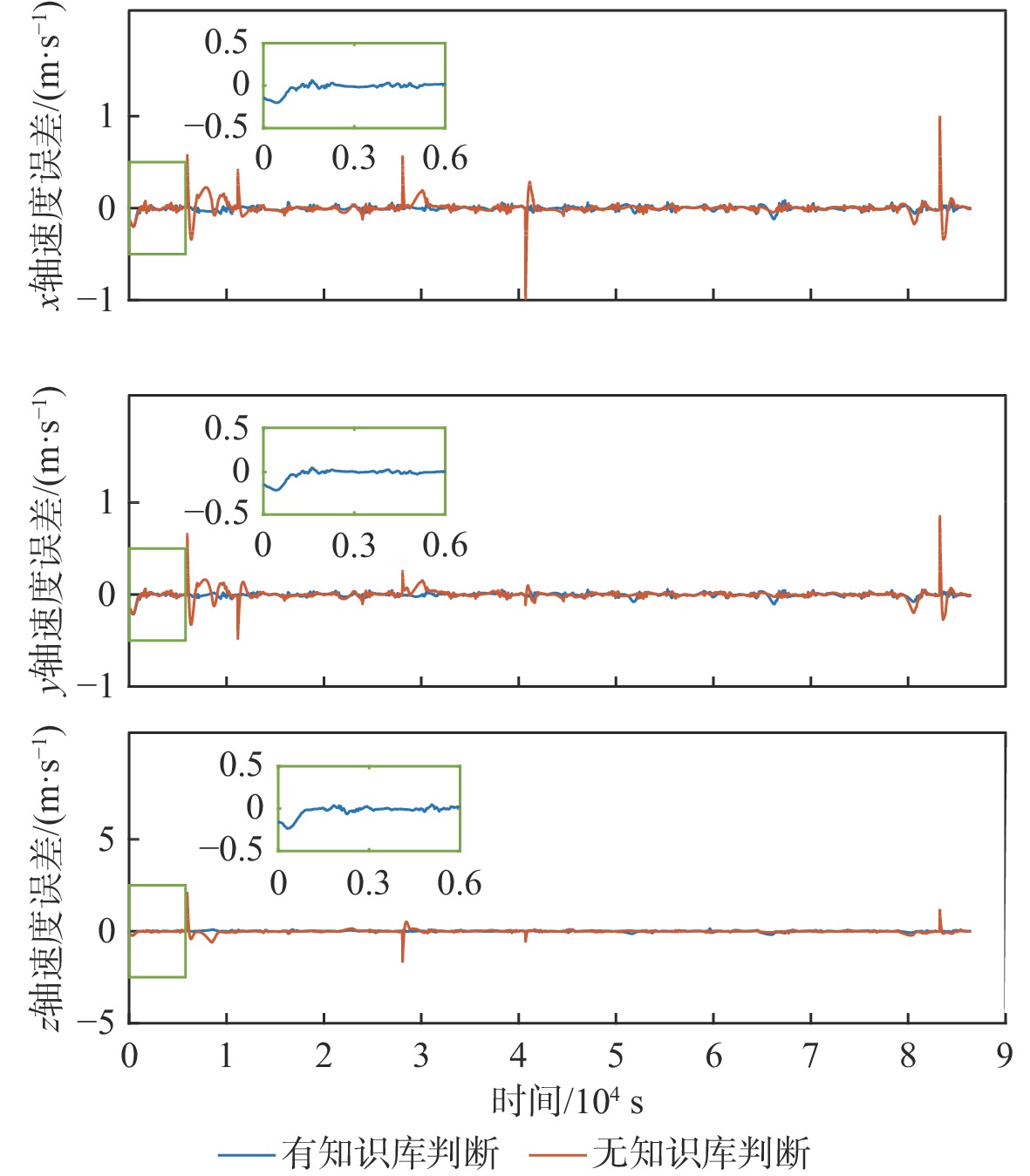
表 7 导航平均误差
Table 7. Navigation mean error
判断方法 平均位置误差$ {\text{/m}} $ 平均速度误差$/({\text{m} } \cdot { {\text{s} }^{ - 1} })$ 有知识库判断 38.9893 0.0792 无知识库判断 43.6020 0.0905
下载: 导出CSV
表 8 图像处理时间
Table 8. Image processing time
ms 匹配模式 模板匹配时间 图像匹配时间 总时间 图像匹配 8 557 8 557 确定匹配模板后图像匹配 3 143 316 3 459
下载: 导出CSV
-
[1] KAU S. Autonomous satellite orbital navigation using known and unknown earth landmarks[C]//Guidance and Control Conference. Reston: AIAA, 1975. [2] HO D, ASEM A. NOAA-AVHRR image referencing[J]. International Journal of Remote Sensing, 1986, 7(7): 895-904. doi: 10.1080/01431168608948898 [3] EMERY W J, BALDWIN D, MATTHEWS D. Maximum cross correlation automatic satellite image navigation and attitude corrections for open-ocean image navigation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(1): 33-42. doi: 10.1109/TGRS.2002.808061 [4] 杨博, 张典律, 赵晓涛. 地标自主导航的高精度地标库建立方法[J]. 北京航空航天大学学报, 2018, 44(1): 1-9. doi: 10.13700/j.bh.1001-5965.2017.0021YANG B, ZHANG D L, ZHAO X T. A building method of high-precision landmark library for landmark autonomous navigation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(1): 1-9(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0021 [5] 李木子. 基于地面遥感图像的卫星自主定轨方法研究[D]. 南京: 南京大学, 2018: 43-50.LI M Z. Investigations of autonomous orbit determination based on ground remote-sensing images[D]. Nanjing: Nanjing University, 2018: 43-50(in Chinese). [6] 高有涛, 刘靖雨, 王兆龙, 等. 基于遥感图像的无固定标志点卫星自主定轨[J]. 上海航天(中英文), 2021, 38(2): 66-75.GAO Y T, LIU J Y, WANG Z L, et al. Autonomous orbit determination based on remote sensing image without fixed landmarks[J]. Aerospace Shanghai (Chinese & English), 2021, 38(2): 66-75(in Chinese). [7] NICOLA G, PIERDANIELE G. Ontologies and knowledge bases towards a terminological clarification[C]//Towards Very Large Knowledge Bases. Amsterdam: IOS Press, 1995: 25-32. [8] NECHES R, FIKES R, FININ T, et al. Enabling technology for knowledge sharing[J]. AI Magazine, 1991, 12(3): 36-56. [9] USCHOLD M, GRUNINGER M. Ontologies: Principles, methods and applications[J]. The Knowledge Engineering Review, 1996, 11(2): 93-136. doi: 10.1017/S0269888900007797 [10] IAN H, PETER F, HAROLD B, et al. SWRL: A semantic web rule language combining OWL and RuleML[EB/OL]. (2004-05-21) [2021-07-01]. http://www.w3.org/Submission/2004/SUBM-SWRL-20040521. [11] 李嘉锐. 本体知识库构建研究: 以水稻领域为例[D]. 北京: 中国农业科学院, 2015: 29-36.LI J R. A study of ontology knowledge base construction in rice field[D]. Beijing: Chinese Academy of Agricultural Sciences, 2015: 29-36(in Chinese). [12] 吴在刚. 基于天体目标的航天器智能天文导航方法[D]. 哈尔滨: 哈尔滨工业大学, 2018: 22-35.WU Z G. Intelligent astronomy navigation method for spacecraft based on celestial body[D]. Harbin: Harbin Institute of Technology, 2018: 22-35(in Chinese). [13] 吴一全, 刘忠林. 遥感影像的海岸线自动提取方法研究进展[J]. 遥感学报, 2019, 23(4): 582-602.WU Y Q, LIU Z L. Research progress on methods of automatic coastline extraction based on remote sensing images[J]. Journal of Remote Sensing, 2019, 23(4): 582-602(in Chinese). [14] ZHU Q D, JING L Q, BI R S. Exploration and improvement of Ostu threshold segmentation algorithm[C]//2010 8th World Congress on Intelligent Control and Automation. Piscataway: IEEE Press, 2010: 6183-6188. [15] VYKHOVANETS V S. The notional model of knowledge representation[J]. Journal of Physics:Conference Series, 2021, 1864(1): 012058. doi: 10.1088/1742-6596/1864/1/012058 [16] 羊柳, 钱林方, 丁晟春, 等. 基于本体和知识组件的自行火炮设计知识表示技术[J]. 兵工学报, 2015, 36(7): 1160-1166. doi: 10.3969/j.issn.1000-1093.2015.07.002YANG L, QIAN L F, DING S C, et al. Design knowledge representation technique for self-propelled artillery based on ontology and knowledge components[J]. Acta Armamentarii, 2015, 36(7): 1160-1166(in Chinese). doi: 10.3969/j.issn.1000-1093.2015.07.002 [17] 钟秀琴, 符红光, 佘莉, 等. 基于本体的几何学知识获取及知识表示[J]. 计算机学报, 2010, 33(1): 167-174. doi: 10.3724/SP.J.1016.2010.00167ZHONG X Q, FU H G, SHE L, et al. Geometry knowledge acquisition and representation on ontology[J]. Chinese Journal of Computers, 2010, 33(1): 167-174(in Chinese). doi: 10.3724/SP.J.1016.2010.00167 [18] CORMAN J, XIAO G H. Certain answers to a sparql query over a knowledge base[M]//Semantic technology. Cham: Springer International Publishing, 2020: 320-335. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 233
- HTML全文浏览量: 71
- PDF下载量: 23
- 被引次数: 0
