



Sliding mode control for formation flying near libration points using hybrid propulsion
-
摘要:
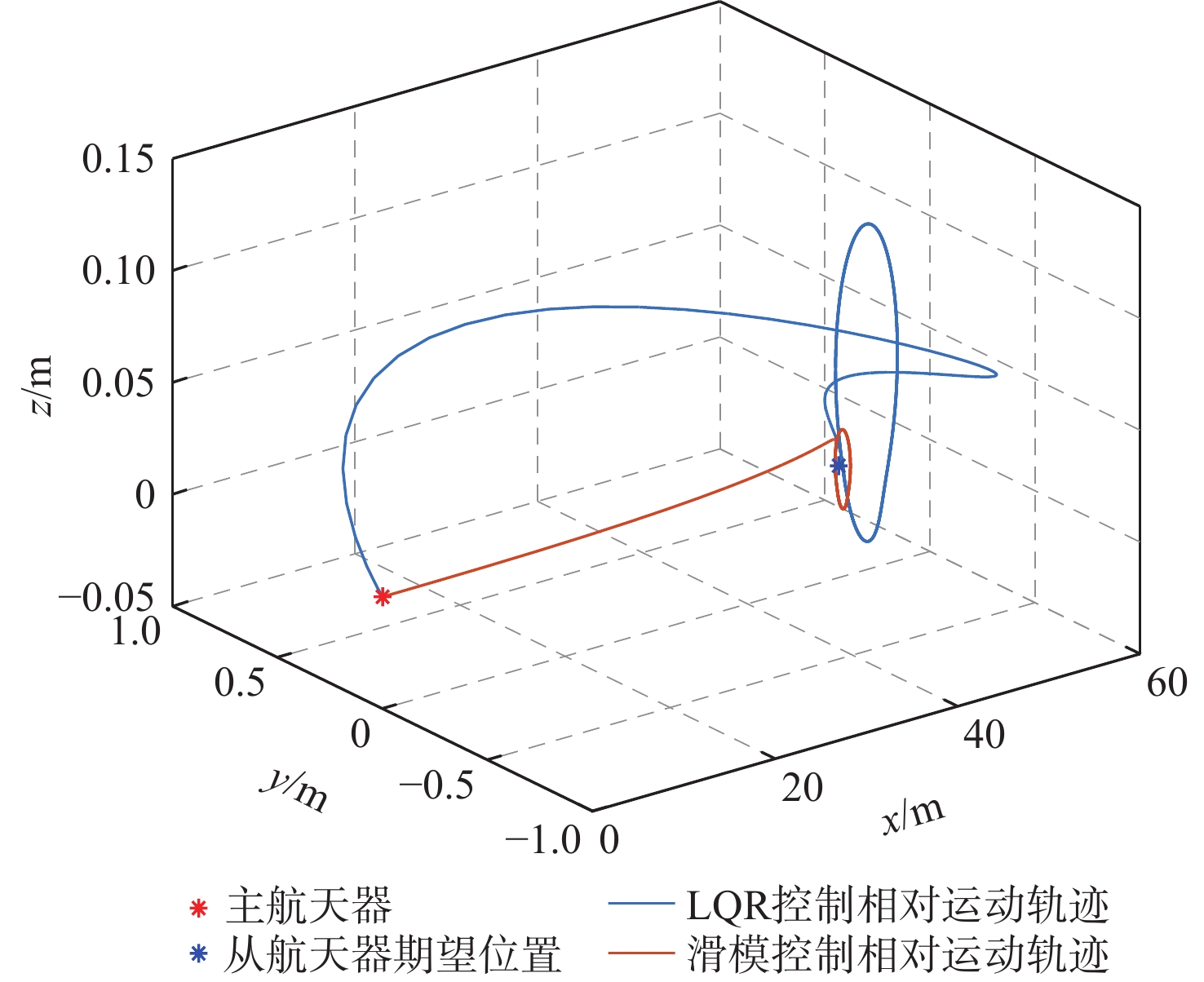
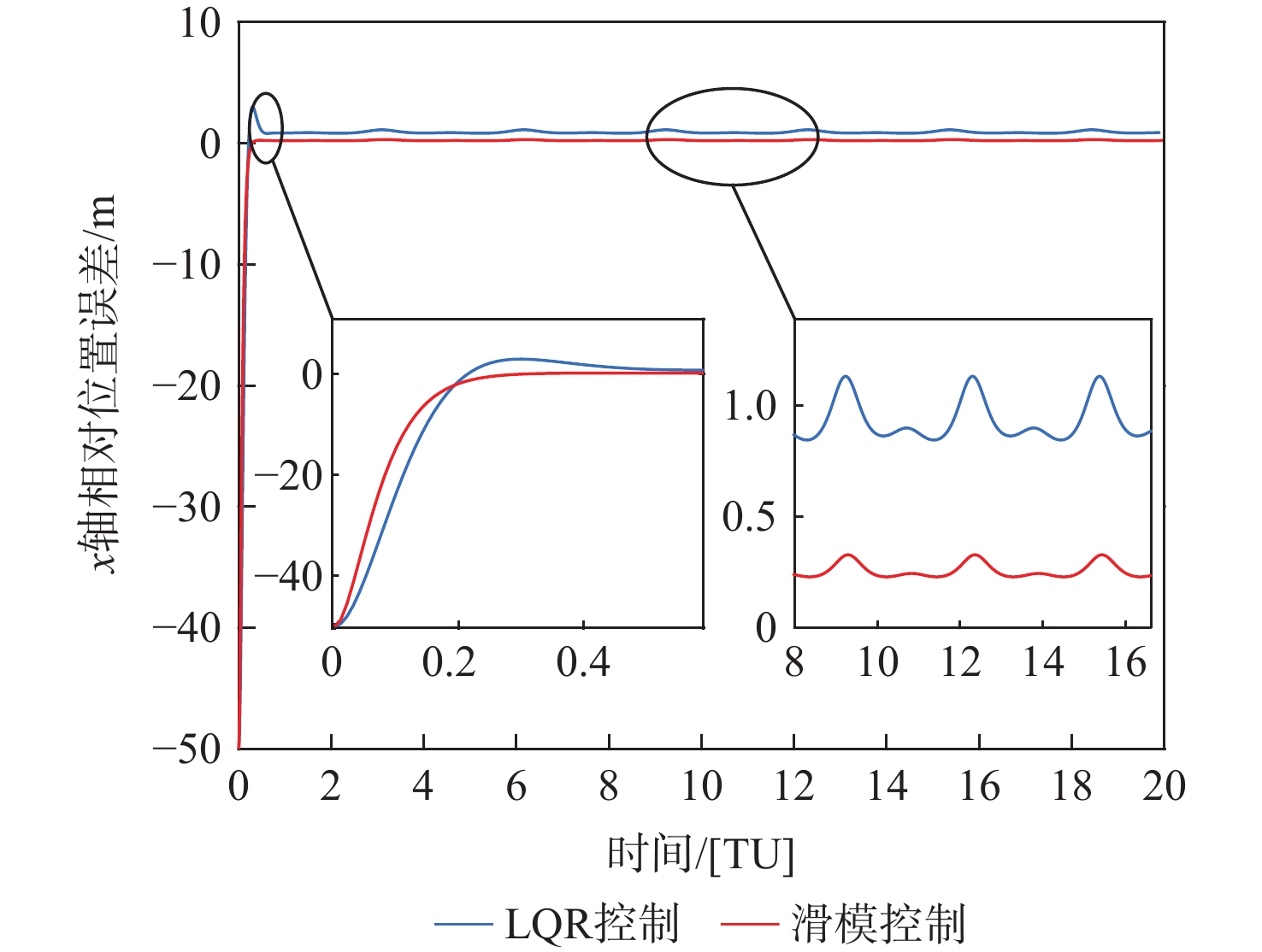
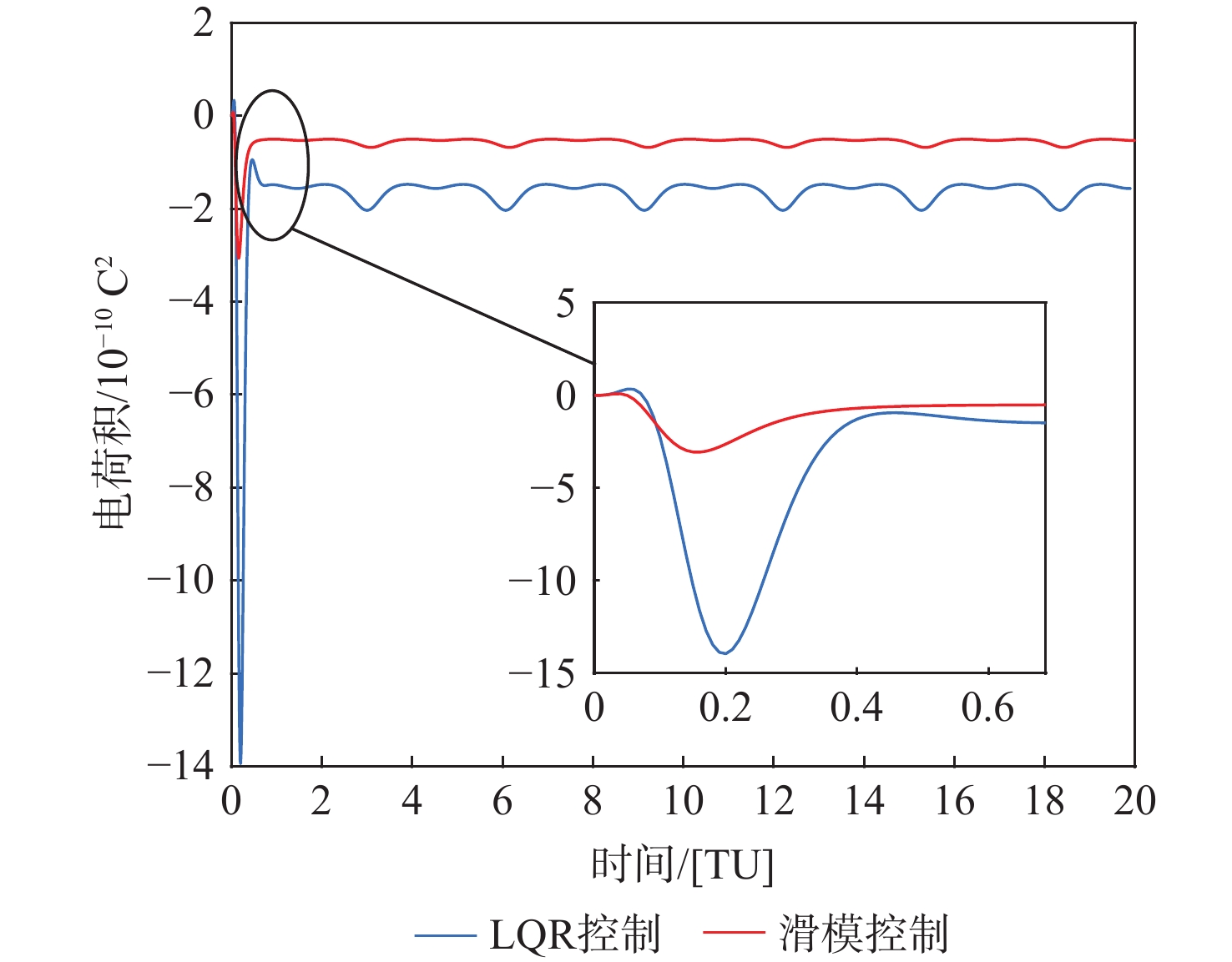
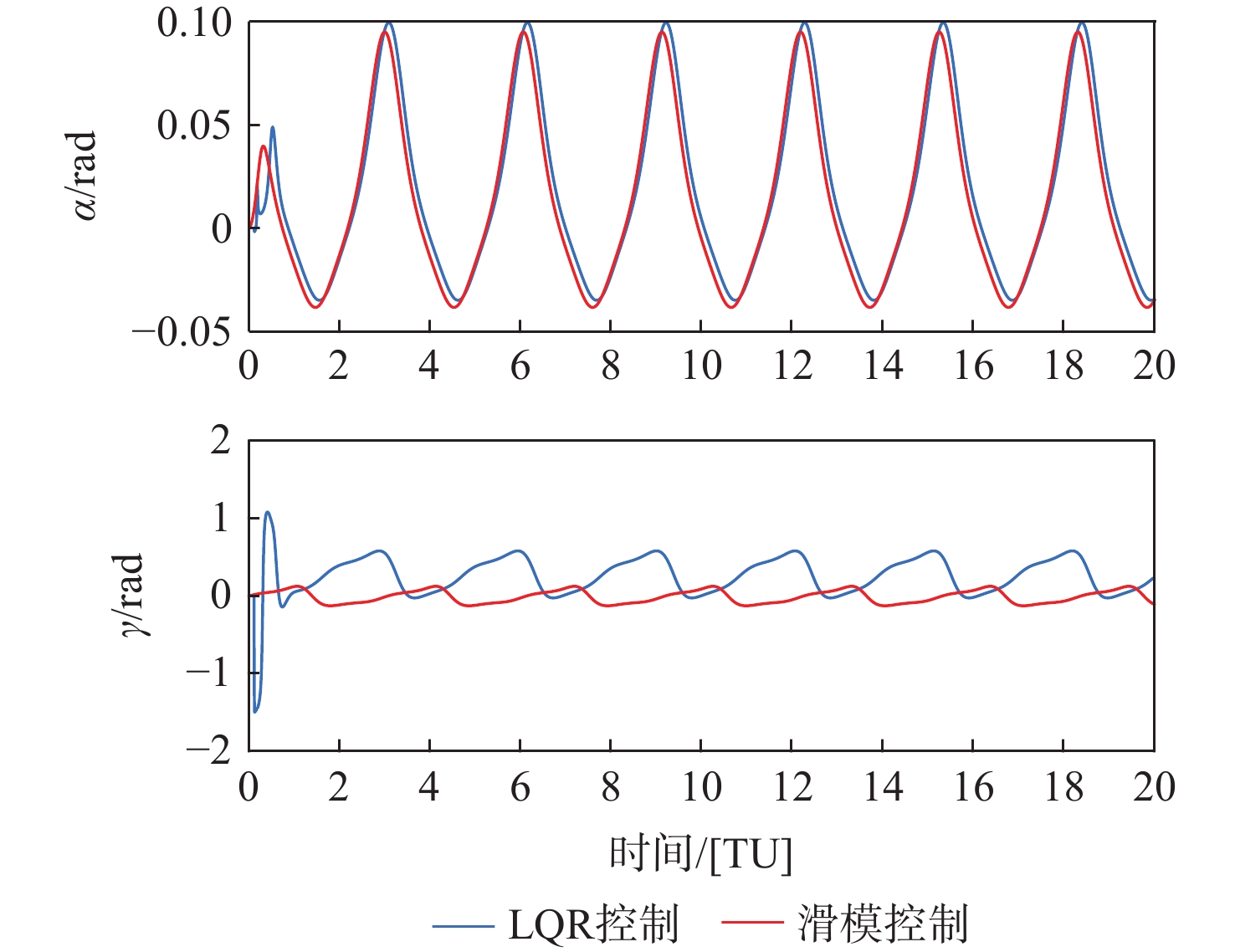
针对近距离航天器编队在日地系人工L1点附近的飞行控制问题,提出一种将太阳帆推进技术与库仑力编队技术相结合的混合推进控制方法。通过控制从航天器太阳帆相对于主航天器的姿态角调整主从间光压力差,同时与主从间库仑力相配合,既解决仅依靠太阳帆控制而存在的欠驱动问题,又改善了库仑编队的可控性。以太阳帆圆形限制性三体问题(SSCRTBP)模型为基础,给出共线人工平动点位置的计算方法,并构造主航天器运行轨道;引入航天器间库仑力,推导出混合推进编队相对运动方程;设计了固定时间滑模控制策略,以从航天器太阳帆的2个姿态角和主从间电荷积为控制量,对编队构型进行控制,将其与LQR控制策略对比,仿真结果表明:固定时间滑模控制策略在控制精度、所需时间、能量消耗等方面均优于LQR控制策略。在时长3年的任务中,编队仅用23天就展开完毕,保持阶段基线相对误差小于1%,其他两轴误差在厘米量级,整个过程无工质消耗,对于今后开展长期深空探测任务具有重要意义。
Abstract:Abstract: Aiming at the flight control problem of proximity spacecraft formation near the artificial L1point of the sun-earth system, a hybrid propulsion control method combining solar sail propulsion and Coulomb force formation technology is proposed. By controlling the relative attitude angles of the follower’s sail, the solar radiation pressure difference between two spacecraft can be adjusted, and matched with Coulomb force, not only the underactuated problem of solar sail control alone is solved, but the controllability of Coulomb formation is also improved. Firstly, based on the solar sail circular restricted three-body problem (SSCRTBP) model, the calculation method of the position of the collinear artificial libration point is given and the orbit of the main craft is constructed. The relative motion equation of the hybrid propulsion configuration is then determined by the introduction of the Coulomb force between spacecraft. Finally, the fixed-time sliding mode control strategy is designed to control the formation configuration by taking the two attitude angles of the follower’s sail and the charge product between the two crafts as the control parameters. Then the sliding mode control strategy is compared with the LQR control strategy in order to reflect its high performance. The simulation results show that the fixed-time sliding mode control strategy is superior to the LQR control strategy in terms of control accuracy, required time and energy consumption. During a 3-year mission, the formation can be deployed in only 23 days. The baseline relative error is less than 1%, whereas the error on the other two axes is on the scale of centimeters. For long-term deep space exploration trips in the future, the fact that no fuel is used throughout the entire process is extremely important. -
[1] 曹喜滨, 张锦绣, 王峰. 航天器编队动力学与控制[M]. 北京: 国防工业出版社, 2013: 1-5.CAO X B, ZHANG J X, WANG F. Dynamics and control of spacecraft formation flying[M]. Beijing: National Defense Industry Press, 2013: 1-5(in Chinese). [2] WANG F, CHEN X Q, TSOURDOS A, et al. Sun-Earth L2 point formation control using polynomial eigenstructure assignment[J]. Acta Astronautica, 2012, 76(3): 26-36. [3] PENG H J, ZHAO J, WU Z G, et al. Optimal periodic controller for formation flying on libration point orbits[J]. Acta Astronautica, 2011, 69(7-8): 537-550. doi: 10.1016/j.actaastro.2011.04.020 [4] BANDO M, ICHIKAWA A. Formation flying along Halo orbit of circular-restricted three-body problem[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(1): 123-129. doi: 10.2514/1.G000463 [5] ROUZEGAR H, KHOSRAVI A, SARHADI P. Spacecraft formation flying control around L2 Sun-Earth libration point using on-off SDRE approach[J]. Advances in Space Research, 2021, 67(7): 2172-2184. doi: 10.1016/j.asr.2021.01.008 [6] 姜春生, 王永, 李恒年, 等. 日地平动点编队飞行自抗扰轨道维持控制[J]. 空间控制技术与应用, 2017, 43(1): 49-54.JIANG C S, WANG Y, LI H N, et al. ADRC-based orbit maintaining control of spacecraft formation flying around halo orbits about the Sun-Earth libration points[J]. Aerospace Control and Application, 2017, 43(1): 49-54(in Chinese). [7] XU M, LIANG Y Y, FU X Y. Formation flying on quasi-Halo orbits in restricted Sun-Earth/Moon system[J]. Aerospace Science and Technology, 2017, 67: 118-125. doi: 10.1016/j.ast.2017.03.038 [8] WANG W, MENGALL G, QUARTA A A, et al. Distributed adaptive synchronization for multiple spacecraft formation flying around Lagrange point orbits[J]. Aerospace Science and Technology, 2018, 74: 93-103. doi: 10.1016/j.ast.2018.01.007 [9] HE Z Q, YAO L. Improved successive approximation control for formation flying at libration points of solar-Earth system[J]. Mathematical Biosciences and Engineering, 2021, 18(4): 4084-4100. doi: 10.3934/mbe.2021205 [10] 龚胜平, 李俊峰, 宝音贺西, 等. 拉格朗日点附近编队的离散控制方法[J]. 宇航学报, 2007, 28(1): 77-81.GONG S P, LI J F, BAOYIN H X, et al. Discrete control method for the formation flying around Lagrange point[J]. Journal of Astronautics, 2007, 28(1): 77-81(in Chinese). [11] 龚胜平. 太阳帆航天器动力学与控制研究[D]. 北京: 清华大学, 2009: 98-100.GONG S P. Study on dynamics and control of sail-craft[D]. Beijing: Tsinghua University, 2009: 98-100(in Chinese). [12] VULPETTI G, JOHNSON L, MATLOFF G L. Solar sails: A novel approach to inter-planetary travel[M]. 2nd ed. Berlin: Springer, 2015. [13] 张楷田. 两类非开普勒轨道的动力学与控制研究[D]. 合肥: 中国科学技术大学, 2016: 1-5.ZHANG K T. Dynamics and control of two types of the non-Keplerian orbits[D]. Hefei: University of Science and Technology of China, 2016: 1-5(in Chinese). [14] MCINNES C R, BOTHMER V, DACHWALD B, et al. Gossamer roadmap technology reference study for a sub-L1 space weather mission[M]//MACDONALD M. Advances in solar sailing. Berlin: Springer, 2014: 227-242. [15] PELONI A, DACHWALD B, CERIOTTI M. Multiple near-Earth asteroid rendezvous mission: Solar-sailing options[J]. Advances in Space Research, 2018, 62(8): 2084-2098. [16] 楼张鹏. 连续小推力航天器平动点轨道动力学与控制[D]. 合肥: 中国科学技术大学, 2019: 68-71.LOU Z P. Dynamics and control of continuous low-thrust spacecraft on libration points[D]. Hefei: University of Science and Technology of China, 2019: 68-71 (in Chinese). [17] 朱敏. 太阳帆航天器动力学与控制研究[D]. 合肥: 中国科学技术大学, 2016: 73-91.ZHU M. Dynamics and control of solar sail spacecraft[D]. Hefei: University of Science and Technology of China, 2016: 73-91(in Chinese). [18] 陈弈澄, 齐瑞云, 张嘉芮, 等. 混合小推力航天器轨道保持高性能滑模控制[J]. 航空学报, 2019, 40(7): 322827. doi: 10.7527/S1000-6893.2019.22827CHEN Y C, QI R Y, ZHANG J R, et al. High-performance sliding mode control for orbit keeping of spacecraft using hybrid low-thrust propulsion[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(7): 322827(in Chinese). doi: 10.7527/S1000-6893.2019.22827 [19] 熊攀. 日地L2平动点编队相对位置保持控制鲁棒D-稳定性分析[D]. 哈尔滨: 哈尔滨工业大学, 2016: 41-50.XIONG P. The robust D-stability analysis of relative position-keeping control for the Sun-Earth L2 libration point formation flying spacecrafts[D]. Harbin: Harbin Institute of Technology, 2016: 41-50(in Chinese). [20] LYON B K, GORDON G P, SATWIK D, et al. Spacecraft formation-flying using inter-vehicle Coulomb forces: NIAC-2002-601[R]. Houghton: NIAC, 2002: 6-7. [21] 施强. 地球同步轨道处三星库仑编队动力学与控制研究[D]. 长春: 空军航空大学, 2017: 14-15.SHI Q. Research on the dynamics and control of three-craft Coulomb formation in GEO[D]. Changchun: Air Force Aviation University, 2017: 14-15(in Chinese). [22] MCINNES C R. Solar sailing: Technology, dynamics and mission applications[M]. Berlin: Springer, 2004: 27-35. [23] RICHARDSON D L. Analytic construction of periodic orbits about the collinear points[J]. Celestial Mechanics, 1980, 22(3): 241-253. doi: 10.1007/BF01229511 [24] 刘宜成, 熊宇航, 杨海鑫. 基于RBF神经网络的多关节机器人固定时间滑模控制[J]. 控制与决策, 2022, 37(11): 2790-2798. doi: 10.13195/j.kzyjc.2021.0421LIU Y C, XIONG Y H, YANG H X. Fixed-time sliding mode control of multi-joint robot based on RBF neural network[J]. Control and Decision, 2022, 37(11): 2790-2798(in Chinese). doi: 10.13195/j.kzyjc.2021.0421 [25] 王婷. 采用混合推进下的库仑卫星编队重构控制研究[J]. 航天控制, 2017, 35(2): 20-24. doi: 10.16804/j.cnki.issn1006-3242.2017.02.004WANG T. Study of Coulomb satellites formation reconfiguration by hybrid propulsion[J]. Aerospace Control, 2017, 35(2): 20-24(in Chinese). doi: 10.16804/j.cnki.issn1006-3242.2017.02.004 [26] ZUO Z Y, HAN Q L, NING B D, et al. An overview of recent advances in fixed-time cooperative control of multiagent systems[J]. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2322-2334. doi: 10.1109/TII.2018.2817248 [27] 王毓媛. 地月空间航天器编队飞行动力学与控制方法研究[D]. 长沙: 国防科技大学, 2017: 15-16.WANG Y Y. Research on dynamics and control of the cislunar spacecraft formation flying[D]. Changsha: National University of Defense Technology, 2017: 15-16(in Chinese). [28] 孙炳磊, 贺亮, 韩飞, 等. 静止轨道卫星高精度悬停编队最优滑模控制器设计[J]. 空间控制技术与应用, 2016, 42(6): 9-13. doi: 10.3969/j.issn.1674-1579.2016.06.002SUN B L, HE L, HAN F, et al. Optimal sliding mode control for geostationary satellite high-precision hovering formation flying[J]. Aerospace Control and Application, 2016, 42(6): 9-13(in Chinese). doi: 10.3969/j.issn.1674-1579.2016.06.002 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 227
- HTML全文浏览量: 68
- PDF下载量: 33
- 被引次数: 0
