



-
摘要:
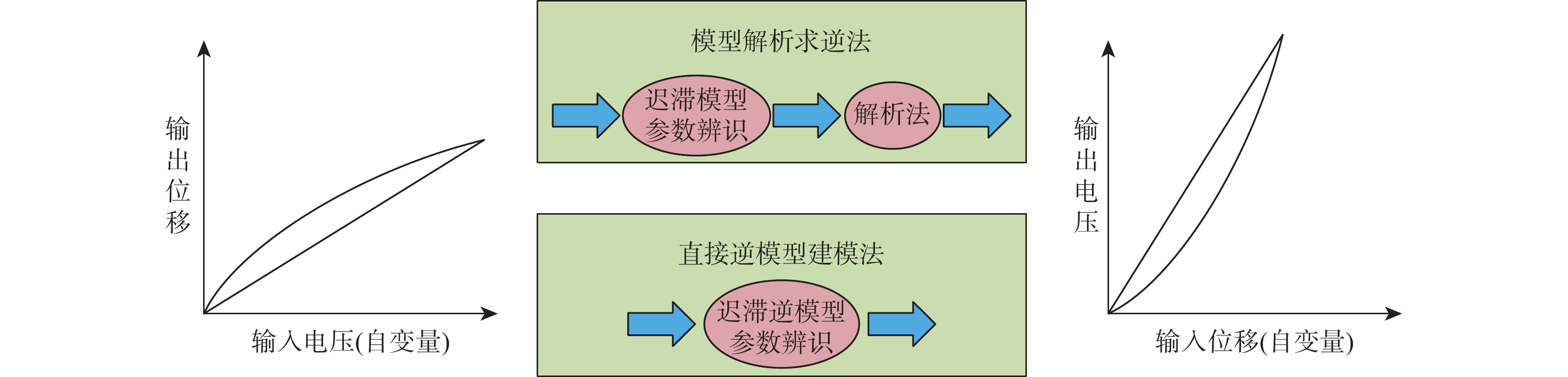
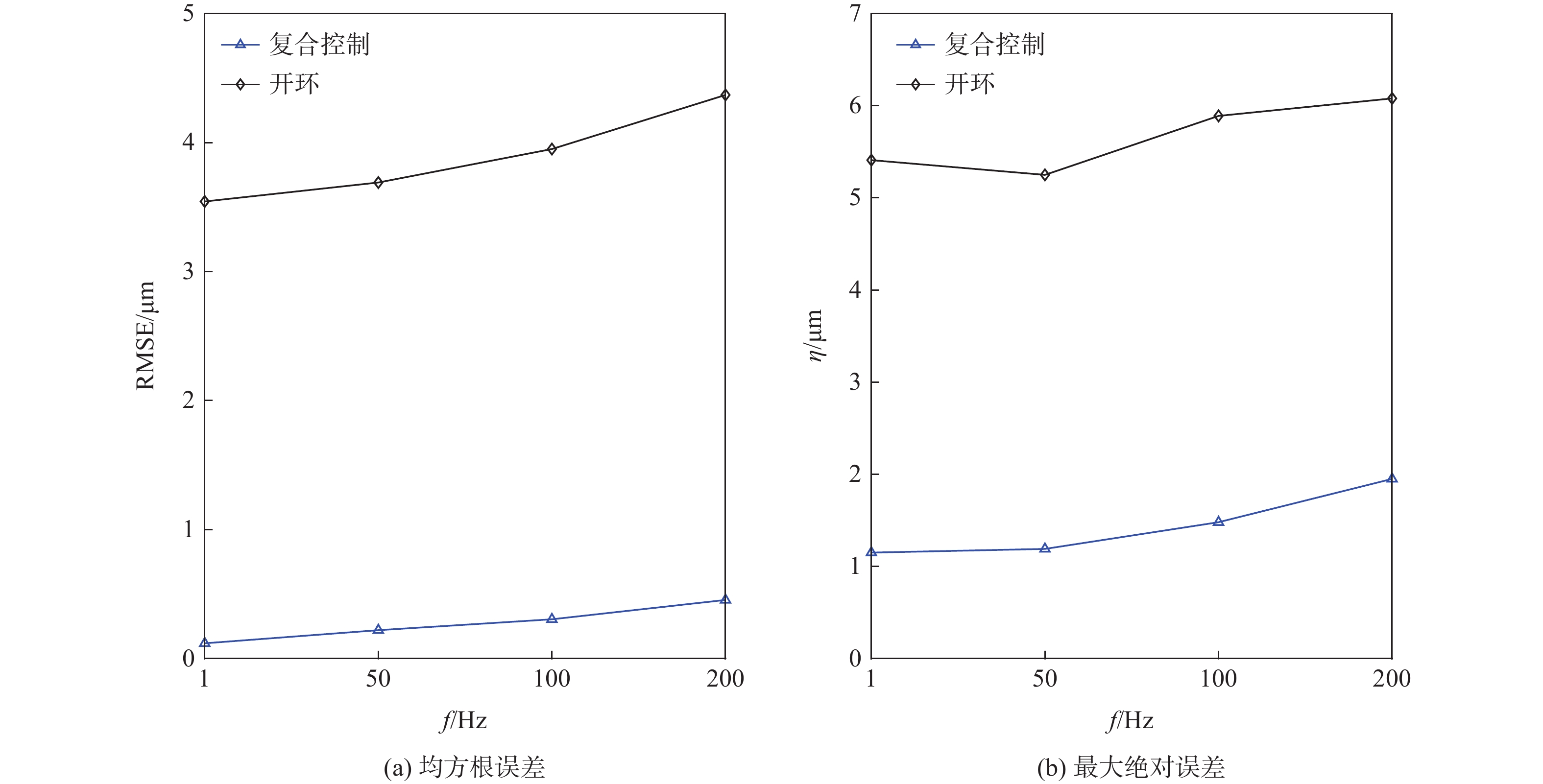
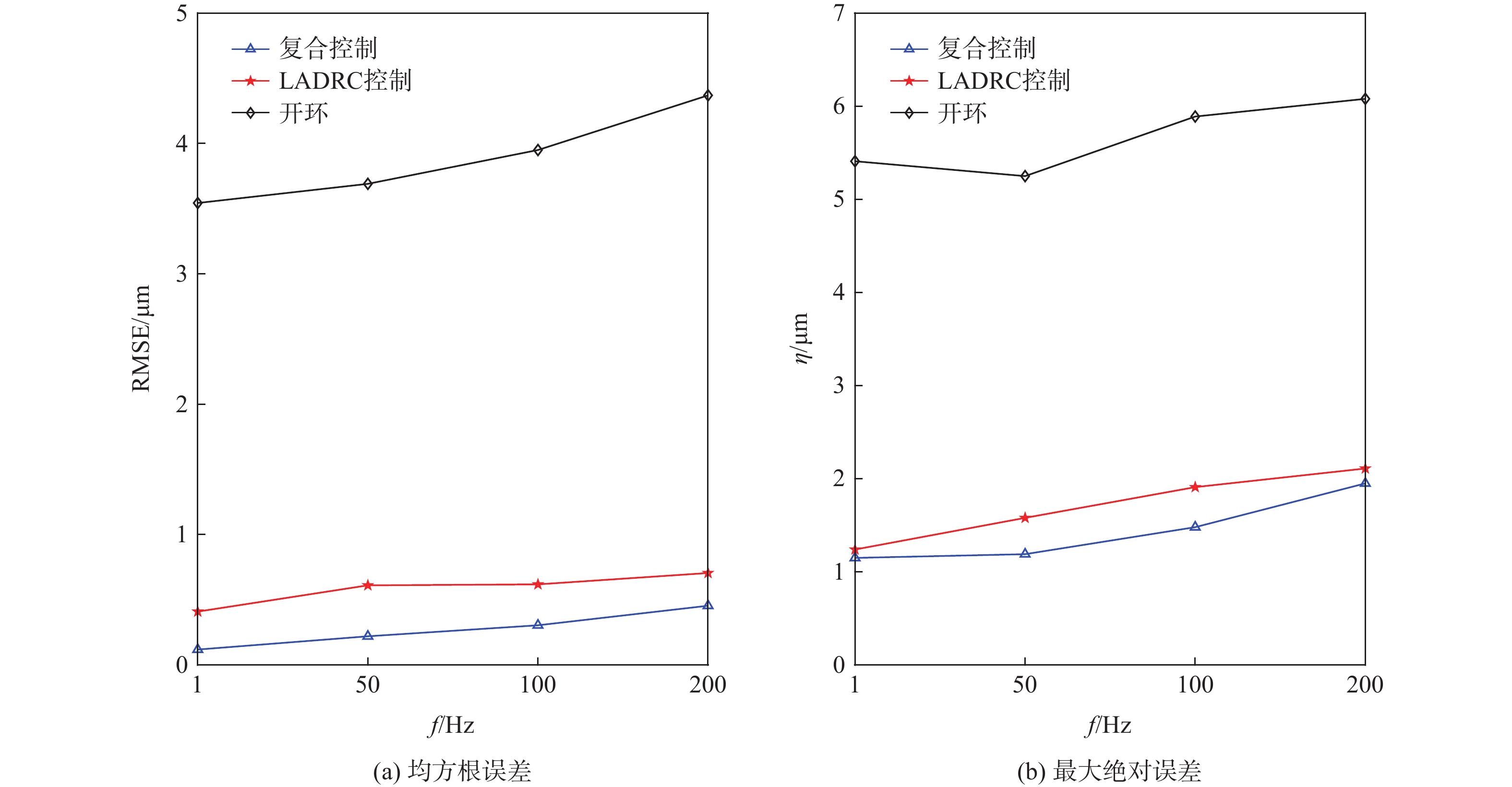
双压电叠堆执行器相较于常规压电叠堆执行器具有位移放大功能,但受制于压电材料的迟滞非线性,位移精度难以满足需求。为减小双压电叠堆执行器的迟滞非线性,建立改进型PI (Prandtl-Ishlinskii)动态迟滞模型并进行参数辨识,提出一种双压电叠堆执行器输出位移分配策略与双压电叠堆并联控制方案,基于迟滞逆模型采用前馈-反馈复合控制进行实验研究,并采用不基于迟滞逆模型的线性自抗扰控制(LADRC)进行对比。基于Links-RT实时控制系统验证控制算法,实验结果表明:在1~200 Hz频率范围内,前馈-反馈复合控制效果最优,当跟踪信号频率为200 Hz时,均方根误差和最大绝对误差分别为0.454 4 μm和1.95 μm,远低于开环的4.369 6 μm和6.08 μm。
Abstract:Compared with common piezoelectric stack actuators, the dual-piezoelectric stack actuator exhibits displacement amplification functionality, but suffers from poor positioning accuracy due to the inherent hysteresis nonlinearity of piezoelectric materials. To reduce the hysteresis nonlinearity of dual-piezoelectric stack actuators, an improved Prandtl-Ishlinskii(PI) dynamic hysteresis model is established and the related parameters are identified. Then, an output displacement allocation strategy and parallel control scheme of the dual-piezoelectric stack actuator are proposed. Based on the inverse hysteresis model, the feedforward-feedback compound control is examined by experiments, and compared with the linear active disturbance rejection control (LADRC) scheme which is independent on the inverse hysteresis model. The control algorithm is validated on the Links-RT real-time control system. Experimental results indicate that the feedforward-feedback compound control performs the best within the frequency range of 1~200 Hz. When the tracking signal frequency reaches 200 Hz, the root mean square error and maximum absolute error are 0.454 4 μm and 1.95 μm respectively, much lower than those of open loop control (4.369 6 μm and 6.08 μm).
-
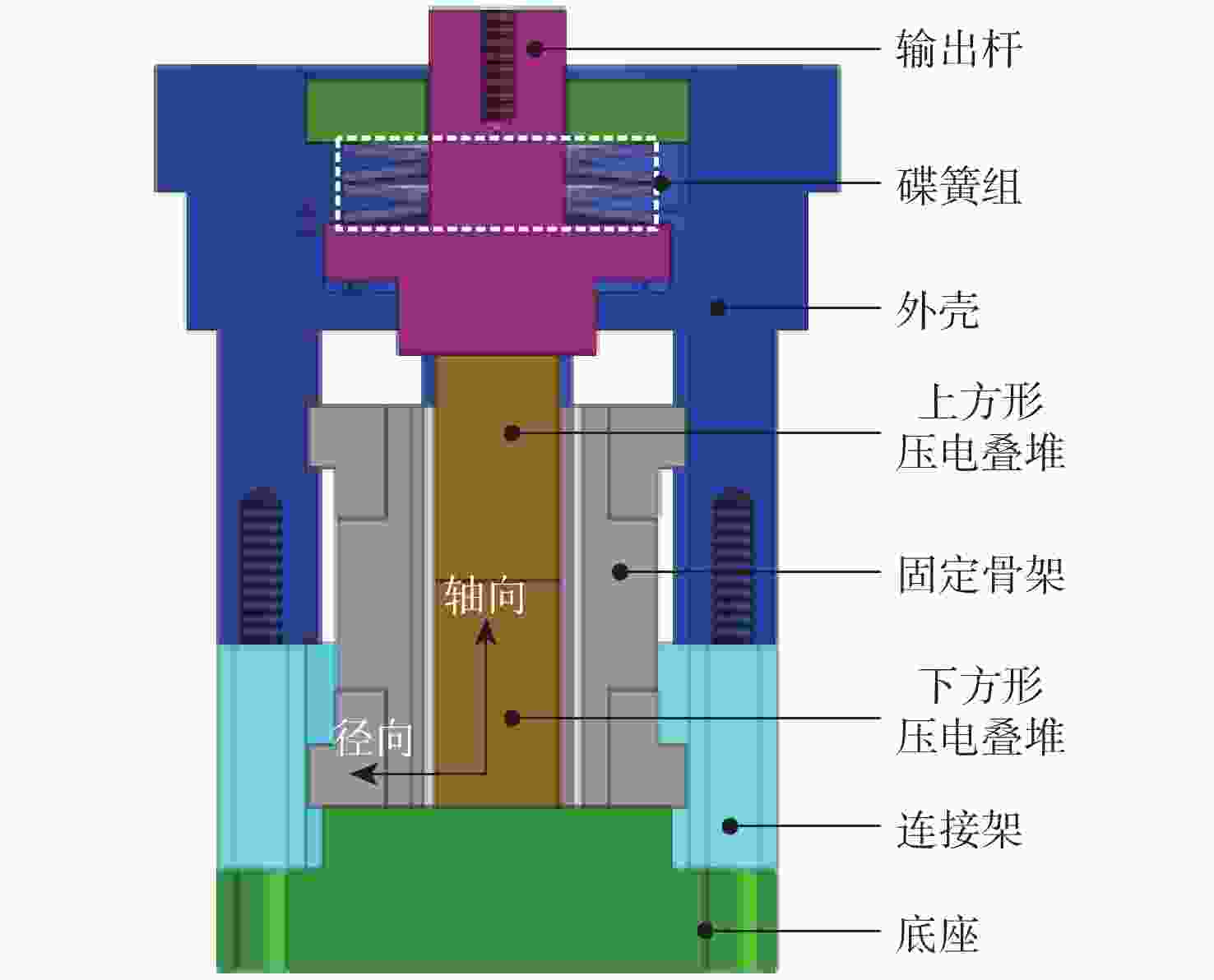
图 1 轴向双压电叠堆执行器结构图
Figure 1. Structurale schematic of axiad dual-piezoelectric stack actuator
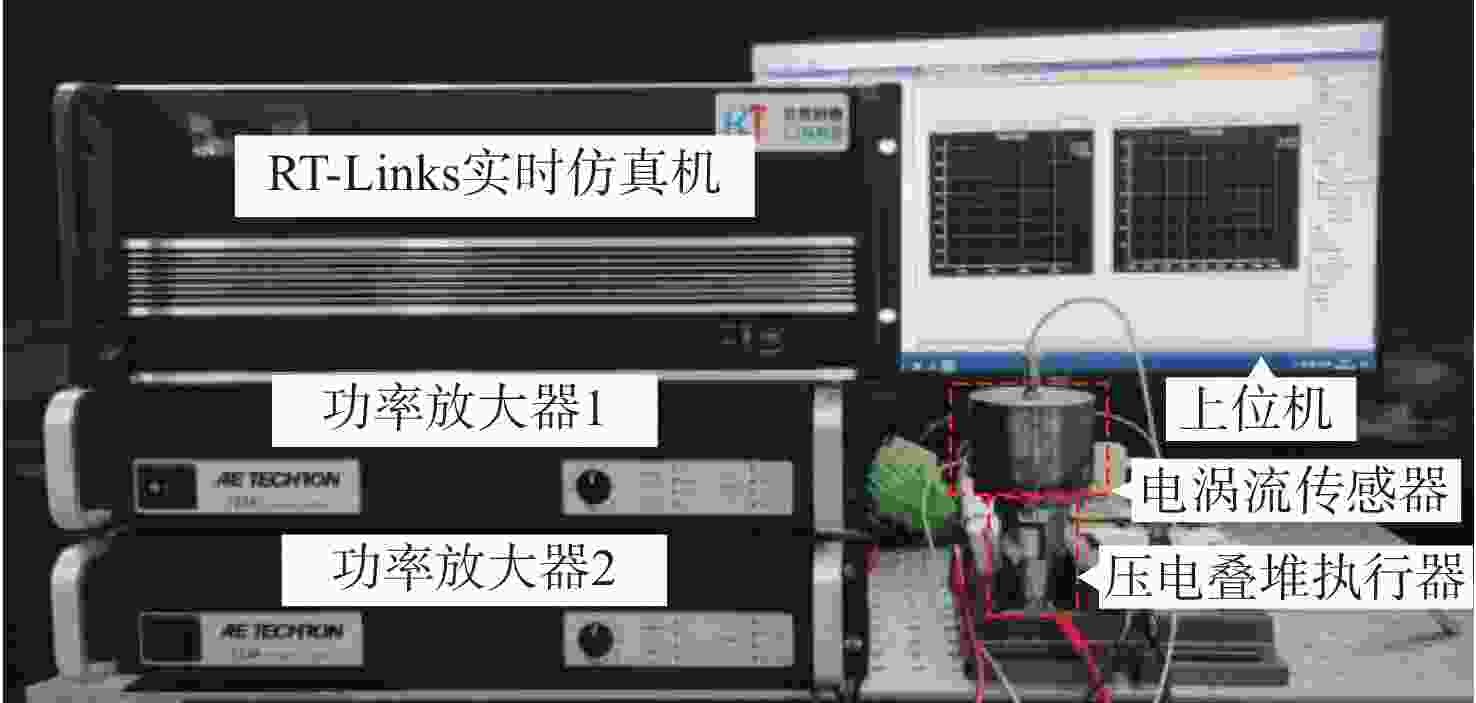
图 4 执行器输出位移测量实验平台
Figure 4. Experimental platform for actuator displacement measurement
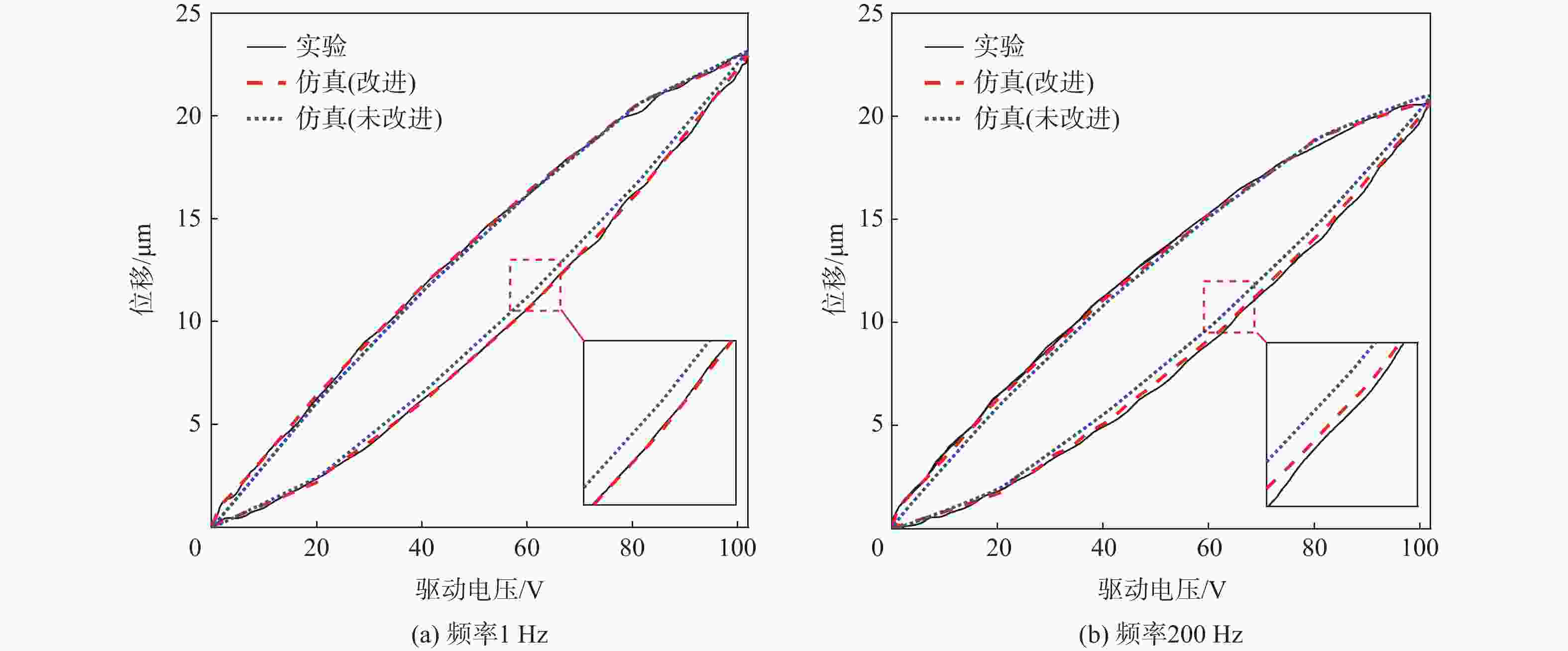
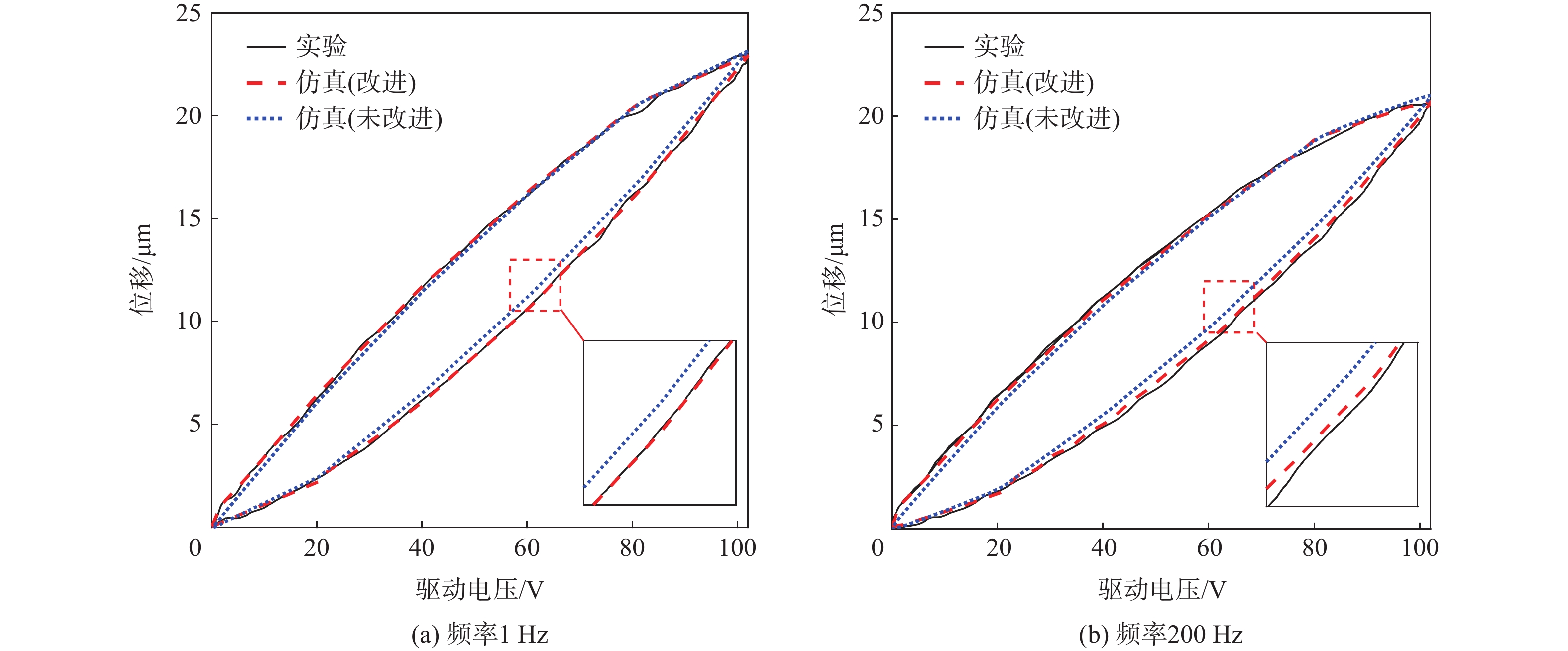
图 5 不同频率上压电叠堆实验与仿真对比
Figure 5. Comparison between experiment and simulation of upper piezoelectric stack at different frequencies
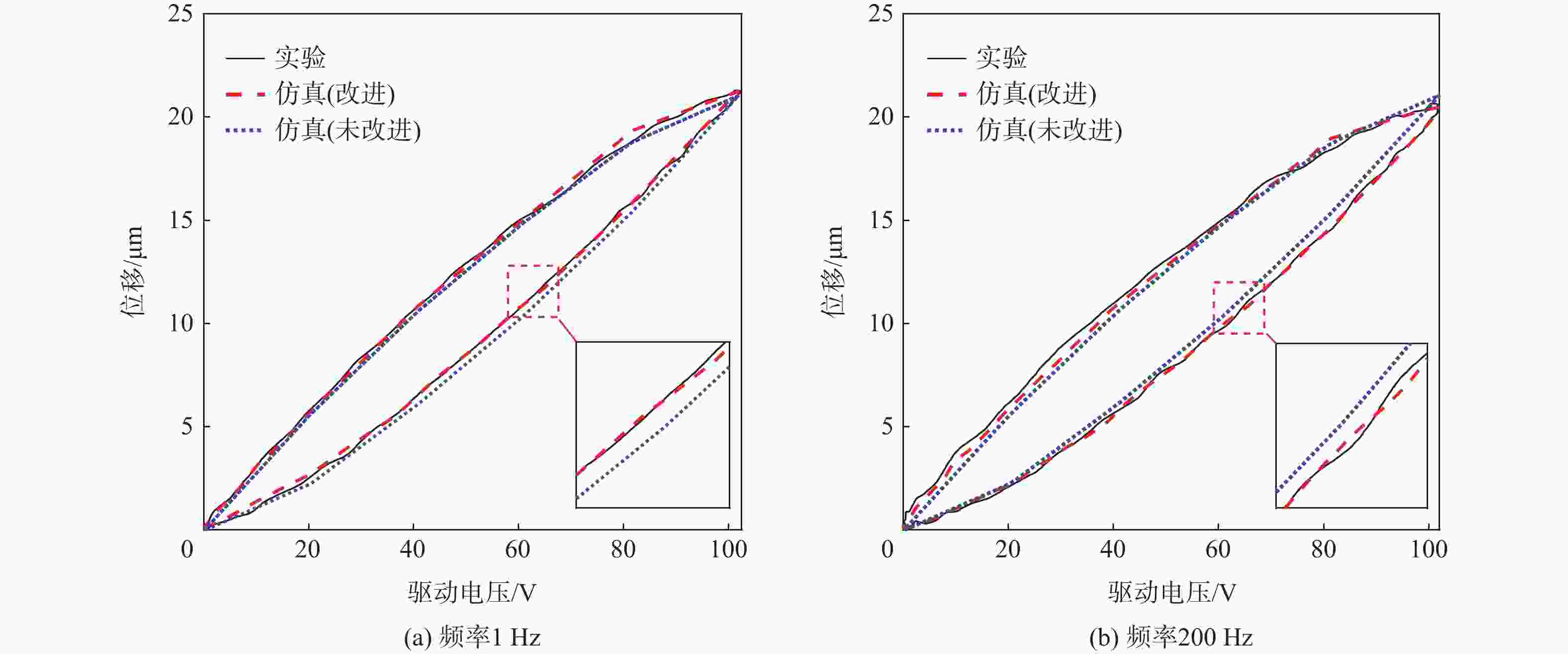
图 6 不同频率下压电叠堆实验与仿真对比
Figure 6. Comparison between experiment and simulation of lower piezoelectric stack at different frequencies
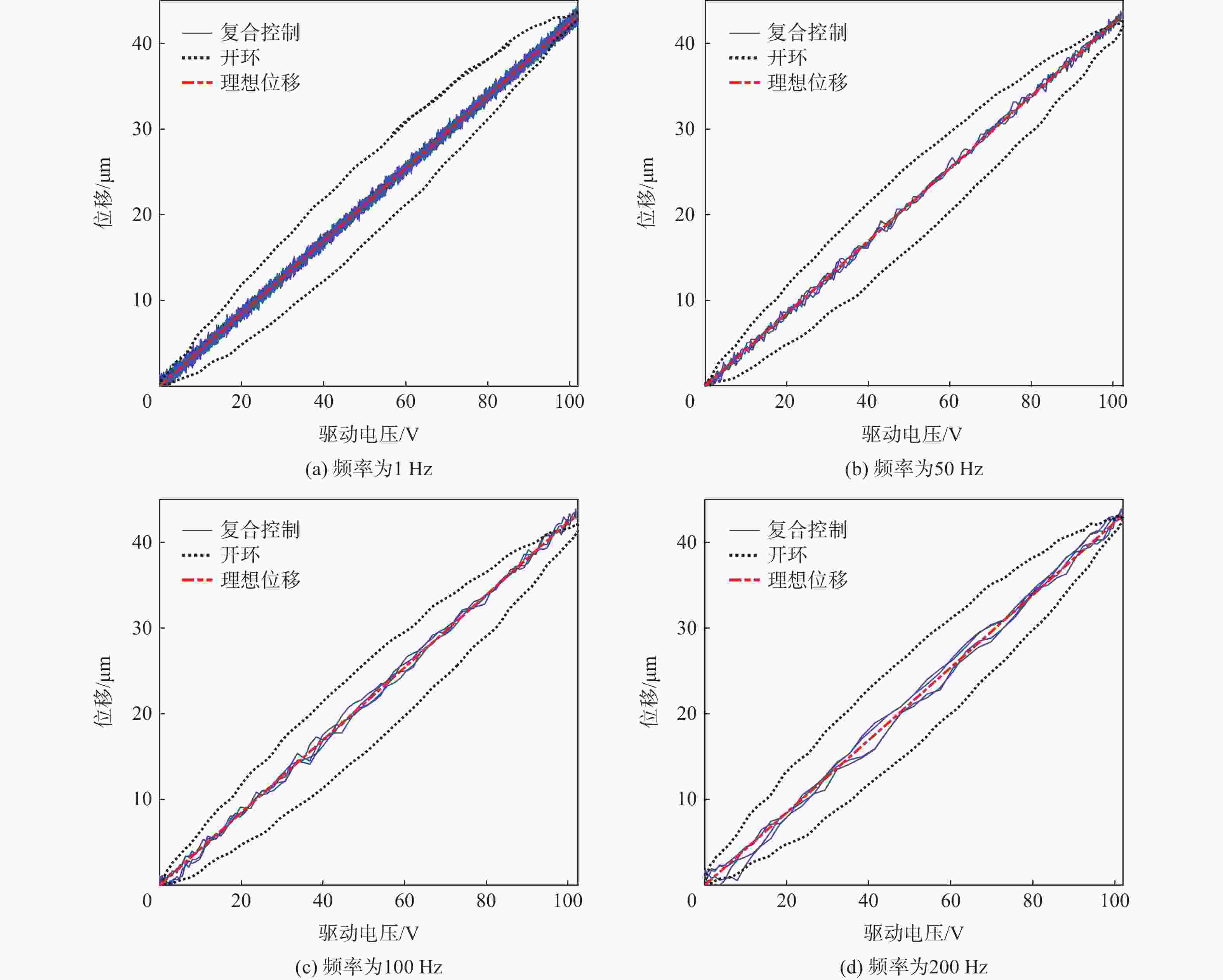
图 9 不同频率下前馈-反馈复合控制滞环曲线
Figure 9. Hysteresis curve of feedforward-feedback compound control at different frequencies

图 10 前馈-反馈复合控制评价参数对比
Figure 10. Comparison of evaluation parameters for feedforward-feedback compound control
表 1 压电叠堆性能参数表
Table 1. Properties of piezoelectric stack
参数 数值 尺寸/mm 10×10×18 质量 ms/kg 0.014 阻尼 cs/(N·s·m−1) 1 200 刚度 ks/(N·μm−1) 180 标称位移y/μm 20 阻断力/N 3 600 静电容量/nF 7 500 谐振频率/kHz 83  下载: 导出CSV
下载: 导出CSV
表 2 参数辨识结果
Table 2. Parameter identification results
参数 数值 v=1 v=2 w1v −0.014 −0.109 w2v 0.057 0.080 w3v 0.040 0.041 w4v 0 0 w5v 0.053 0.066 w6v −0.099 −0.229 w7v 0.117 0.178 w8v −0.027 0.012 w9v 0 0 w10v 0.014 0.031 w11v −0.019 0.099 p1v 0.721 −0.477 p2v 1.576 1.137 p3v 0.500 0.571 p4v −0.067 −0.071 p5v −0.684 −0.616 p6v 0.113 0.087
下载: 导出CSV
表 3 迟滞逆模型参数辨识结果
Table 3. Parameter identification results of hysteresis inverse model
参数 数值 v=1 v=2 w1v_i −0.011 −0.178 w2v_i 0.107 0.148 w3v_i 0.015 0.003 w4v_i 0 0 w5v_i 0.044 0.057 w6v_i −0.123 −0.213 w7v_i 0.143 0.203 w8v_i −0.027 −0.013 w9v_i 0 0 w10v_i 0.013 0.018 w11v_i −0.018 −0.019 p1v_i 0.785 0.153 p2v_i −2.43 −2.043 p3v_i 0.415 0.426 p4v_i −0.064 −0.064 p5v_i 0.133 0.067 p6v_i 0.208 0.201
下载: 导出CSV
-
[1] 李宇阳, 朱玉川, 李仁强, 等. 双压电叠堆驱动执行器率相关迟滞建模与分析[J]. 压电与声光, 2019, 41(2): 258-264.LI Y Y, ZHU Y C, LI R Q, et al. Modeling and analysis of rate-dependent hysteresis for dual-piezoelectric stack driven actuator[J]. Piezoelectrics & Acoustooptics, 2019, 41(2): 258-264(in Chinese). [2] LIU Y F, LI J, HU X H, et al. Modeling and control of piezoelectric inertia-friction actuators: Review and future research directions[J]. Mechanical Sciences, 2015, 6(2): 95-107. doi: 10.5194/ms-6-95-2015 [3] 周淼磊, 杨志刚, 田彦涛, 等. 压电执行器非线性控制方法研究进展[J]. 压电与声光, 2007, 29(6): 656-659. doi: 10.3969/j.issn.1004-2474.2007.06.010ZHOU M L, YANG Z G, TIAN Y T, et al. The development on the nonlinear control method of piezoelectric actuator[J]. Piezoelectrics & Acoustooptics, 2007, 29(6): 656-659(in Chinese). doi: 10.3969/j.issn.1004-2474.2007.06.010 [4] GE P, JOUANEH M. Tracking control of a piezoceramic actuator[J]. IEEE Transactions on Control Systems Technology, 1996, 4(3): 209-216. doi: 10.1109/87.491195 [5] LING J, RAKOTONDRABE M, FENG Z, et al. A robust resonant controller for high-speed scanning of nanopositioners: Design and implementation[J]. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1116-1123. doi: 10.1109/TCST.2019.2899566 [6] GU G Y, ZHU L M, SU C Y, et al. Modeling and control of piezo-actuated nanopositioning stages: A survey[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 313-332. doi: 10.1109/TASE.2014.2352364 [7] GAO X H, LIU Y G. Research on control strategy in giant magnetostrictive actuator based on Lyapunov stability[J]. IEEE Access, 2019, 7: 77254-77260. doi: 10.1109/ACCESS.2019.2920853 [8] LEE S H, OZER M B, ROYSTON T J. Piezoceramic hysteresis in the adaptive structural vibration control problem[J]. Journal of Intelligent Material Systems and Structures, 2002, 13(2-3): 117-124. doi: 10.1177/104538902761402512 [9] MING M, FENG Z, LING J, et al. Hysteresis modelling and feedforward compensation of piezoelectric nanopositioning stage with a modified Bouc-Wen model[J]. Micro & Nano Letters, 2018, 13(8): 1170-1174. [10] MAYERGOYZ I D, FRIEDMAN G. Generalized preisach model of hysteresis[J]. IEEE Transactions on Magnetics, 1988, 24(1): 212-217. doi: 10.1109/20.43892 [11] SHEN J C, JYWE W Y, CHIANG H K, et al. Precision tracking control of a piezoelectric-actuated system[J]. Precision Engineering, 2008, 32(2): 71-78. doi: 10.1016/j.precisioneng.2007.04.002 [12] LI Z, ZHANG X Y, SU C Y, et al. Nonlinear control of systems preceded by preisach hysteresis description: A prescribed adaptive control approach[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 451-460. [13] AL JANAIDEH M, RAKOTONDRABE M. Precision motion control of a piezoelectric cantilever positioning system with rate-dependent hysteresis nonlinearities[J]. Nonlinear Dynamics, 2021, 104(4): 3385-3405. doi: 10.1007/s11071-021-06460-w [14] 田雷, 陈俊杰, 崔玉国, 等. 基于PI迟滞模型的单压电变形镜开环控制[J]. 仪器仪表学报, 2017, 38(1): 136-142. doi: 10.3969/j.issn.0254-3087.2017.01.018TIAN L, CHEN J J, CUI Y G, et al. Open-loop control of unimorph piezoelectric deformable mirror based on PI hysteresis model[J]. Chinese Journal of Scientific Instrument, 2017, 38(1): 136-142(in Chinese). doi: 10.3969/j.issn.0254-3087.2017.01.018 [15] 贾高欣, 王贞艳. 压电陶瓷作动器的率相关迟滞建模与内模控制[J]. 压电与声光, 2019, 41(1): 130-134. doi: 10.11977/j.issn.1004-2474.2019.01.030JIA G X, WANG Z Y. Modeling of rate-dependent hysteresis and internal model control of piezoelectric ceramic actuators[J]. Piezoelectrics & Acoustooptics, 2019, 41(1): 130-134(in Chinese). doi: 10.11977/j.issn.1004-2474.2019.01.030 [16] 黄卫清, 史小庆, 王寅. 菱形压电微位移放大机构的设计[J]. 光学 精密工程, 2015, 23(3): 803-809. doi: 10.3788/OPE.20152303.0803HUANG W Q, SHI X Q, WANG Y. Design of diamond piezoelectric micro displacement amplification mechanism[J]. Optics and Precision Engineering, 2015, 23(3): 803-809(in Chinese). doi: 10.3788/OPE.20152303.0803 [17] 邰明皓, 朱玉川, 江裕雷, 等. 双压电二维叠堆执行器控制实验研究[J]. 压电与声光, 2021, 43(2): 254-259.TAI M H, ZHU Y C, JIANG Y L, et al. Experimental research on control of dual piezoelectric two-dimensional stack actuators[J]. Piezoelectrics & Acoustooptics, 2021, 43(2): 254-259(in Chinese). [18] 江裕雷, 朱玉川, 陈龙, 等. 径向双压电叠堆执行器建模与实验研究[J]. 压电与声光, 2021, 43(1): 45-50.JIANG Y L, ZHU Y C, CHEN L, et al. Modeling and experimental study on radial dual-piezoelectric stack actuator[J]. Piezoelectrics & Acoustooptics, 2021, 43(1): 45-50(in Chinese). [19] KUHNEN K. Modeling, identification and compensation of complex hysteretic nonlinearities: A modified Prandtl-Ishlinskii approach[J]. European Journal of Control, 2003, 9(4): 407-418. doi: 10.3166/ejc.9.407-418 [20] 田雷. 基于PI迟滞模型的压电变形镜控制技术研究[D]. 宁波: 宁波大学, 2017: 14-16.TIAN L. Control of piezoelectric deformable mirror based on PI hysteresis model[D]. Ningbo: Ningbo University, 2017: 14-16 (in Chinese). [21] GAN J Q, ZHANG X M, WU H. A generalized Prandtl-Ishlinskii model for characterizing the rate-independent and rate-dependent hysteresis of piezoelectric actuators[J]. The Review of Scientific Instruments, 2016, 87(3): 035002. doi: 10.1063/1.4941941 [22] GAN J Q, ZHANG X M. Modeling of rate-dependent hysteresis in piezoelectric actuators based on a modified Prandtl-Ishlinskii model[J]. International Journal of Applied Electromagnetics and Mechanics, 2015, 49(4): 557-565. doi: 10.3233/JAE-150070 [23] 郑军辉, 崔玉国, 蔡成波, 等. 串联死区算子的压电微夹钳PI迟滞模型[J]. 压电与声光, 2015, 37(4): 650-654.ZHENG J H, CUI Y G, CAI C B, et al. Research on PI hysteresis model with dead-zero operator of piezoelectric micro-gripper[J]. Piezoelectrics & Acoustooptics, 2015, 37(4): 650-654(in Chinese). [24] 雷军委, 晋玉强, 王宏. 基于Lyapunov与混沌激励的自适应参数辨识[M]. 成都: 西南交通大学出版社, 2016: 1-5.LEI J W, JIN Y Q, WANG H. Adaptive parameters identification based on Lyapunov function and chaotic excitation[M]. Chengdu: Southwest Jiaotong University Press, 2016: 1-5 (in Chinese). [25] 顾寒烈. 压电驱动型主动隔振技术研究[D]. 南京: 南京航空航天大学, 2018: 41-49.GU H L. Research on active vibration isolation with piezoelectric actuators[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 41-49 (in Chinese) . -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 193
- HTML全文浏览量: 70
- PDF下载量: 9
- 被引次数: 0
