



-
摘要:
针对复杂环境下的多移动机器人对重点目标区域协同持续监视覆盖问题,假定在目标区域内分布着若干障碍及固定观测点,已获得固定观测点处所关心的目标参量历史测量数据,考虑为机器人群规划一组监视路径,以实现对重点目标区域高覆盖率、高频率的监视覆盖。建立多机器人协同持续监视问题的数学模型;基于小脑模型神经网络(CMAC)对区域内固定观测点的测量数据进行学习泛化以获得区域内目标参量估计;利用基于传感器配置-路径框架划分的路径规划组合策略以求得各机器人优化路径。仿真实验验证了模型和求解方法的有效性。
Abstract:This paper addresses the cooperative continuous monitoring coverage problem of multiple mobile robots for key target areas in complex environments. It is assumed that a number of obstacles and fixed observation points are distributed in the target area, and that the historical measurement data of the target parameters at the fixed observation points have been obtained. A group of monitoring paths are planned for the robot crowd to realize the monitoring coverage of the key target area with high coverage and high frequency. Firstly, the mathematical model of multi-robot cooperative continuous monitoring problem is established. Then, based on the cerebellar model articulation controller (CMAC), the measurement data of the fixed observation points in the region are generalized to obtain the target parameter estimation in the region. Finally, the combined path planning strategy based on sensor configuration-path framework partition is used to obtain the optimal path of each robot. Simulation experiments verify the effectiveness of the proposed method.
-
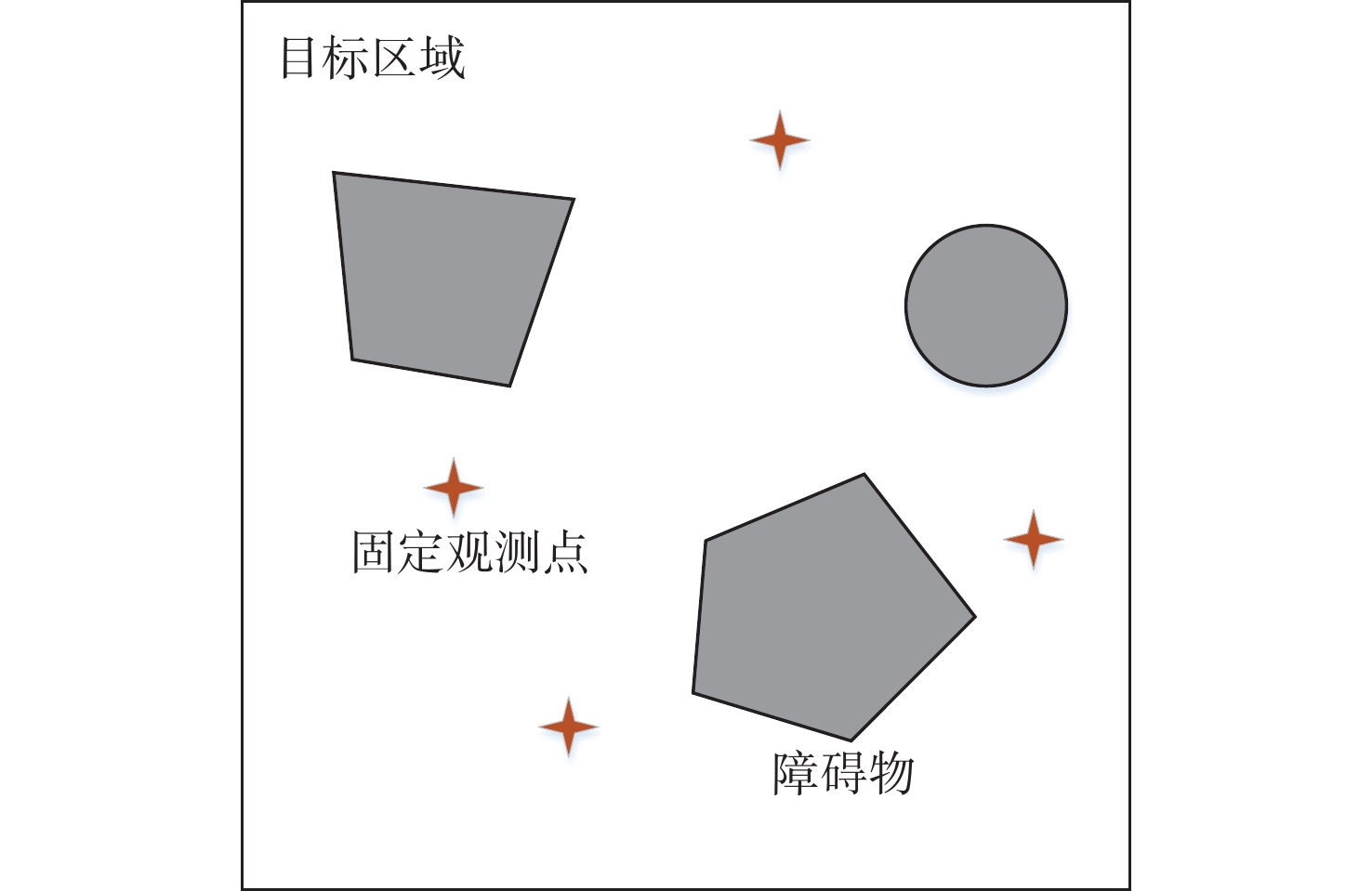
图 1 复杂目标区域及固定观测点示意图
Figure 1. Schematic diagram of complex target area and fixed observation point

图 2 考虑先验信息的多机器人重点区域协同覆盖问题求解策略示意图
Figure 2. Schematic diagram of solution strategy for multi-robot cooperative coverage of key regions with prior information
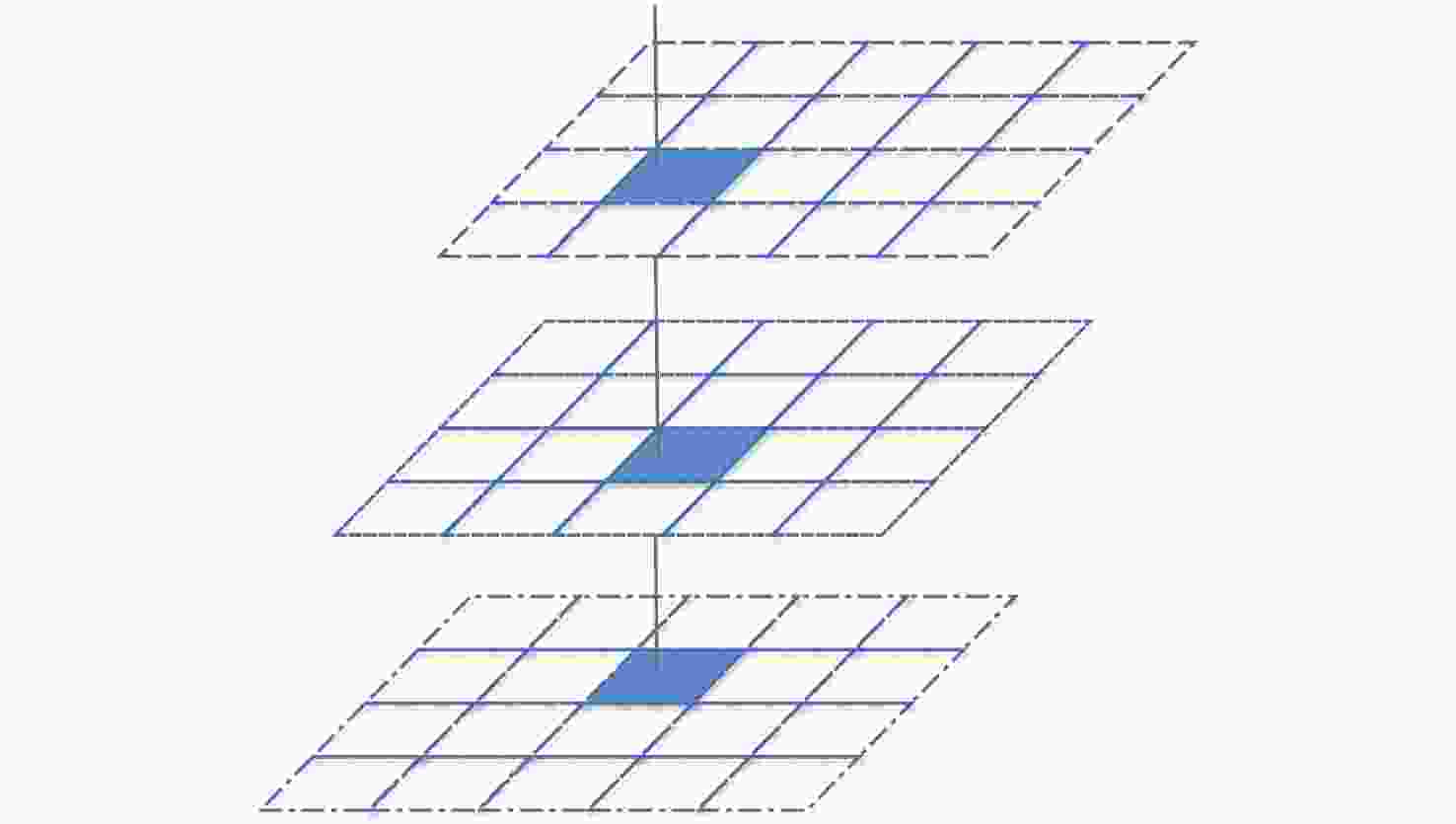
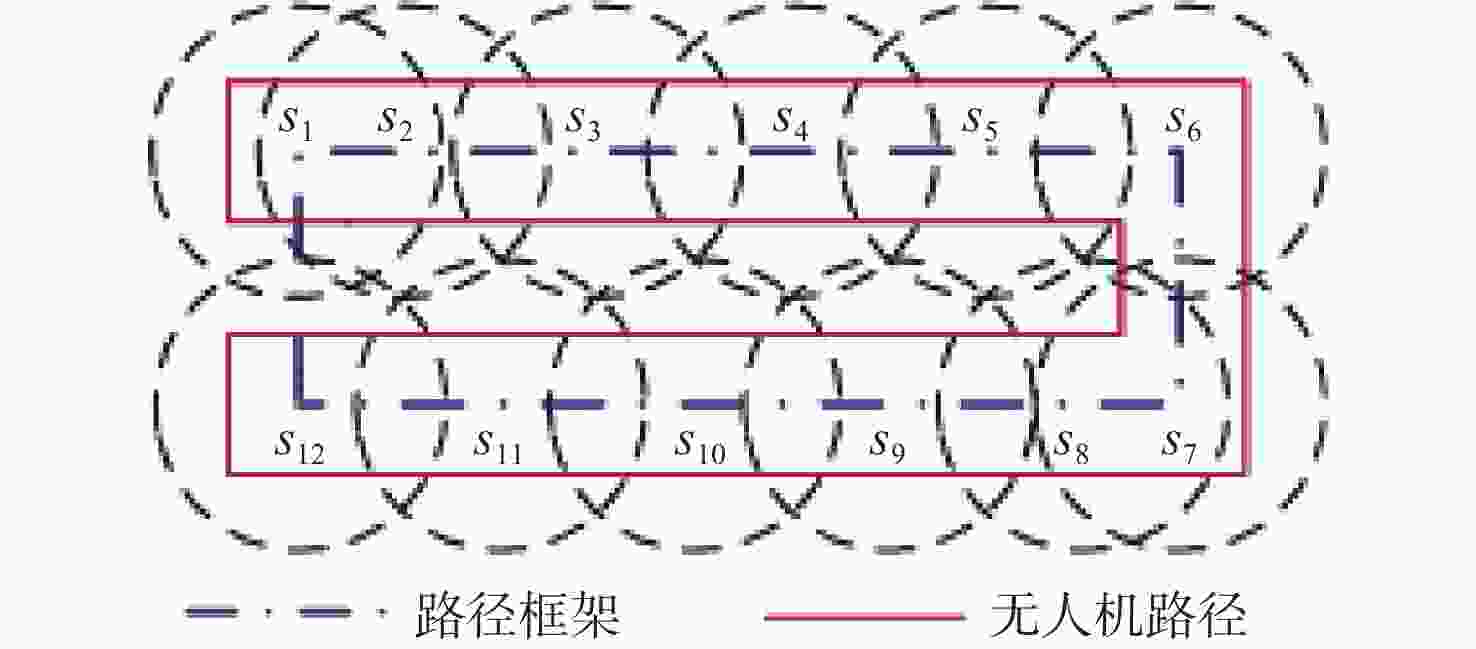
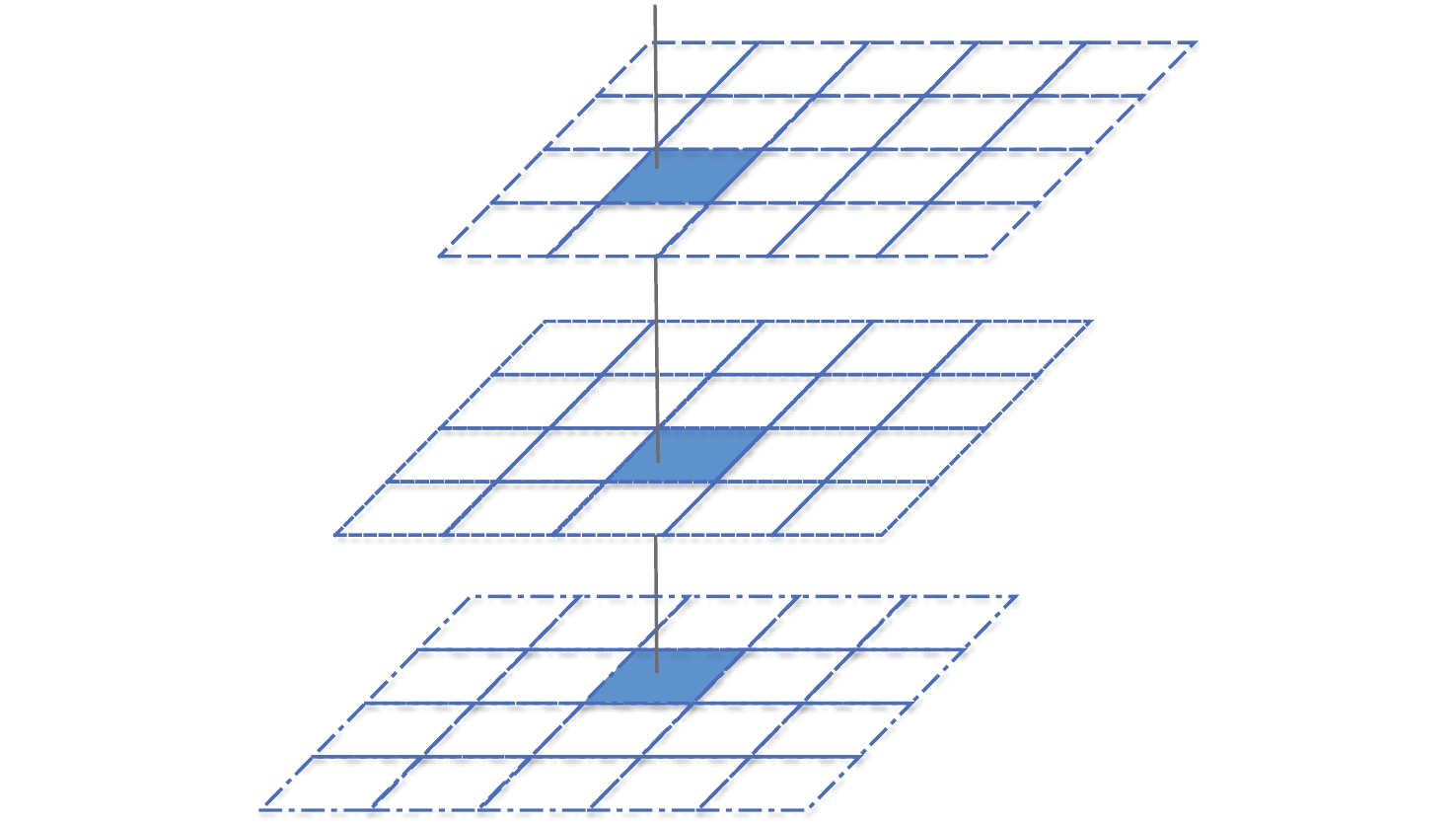
图 4 虚拟传感器配置及路径框架环绕示意图
Figure 4. Schematic diagram of virtual sensor configuration and path framework
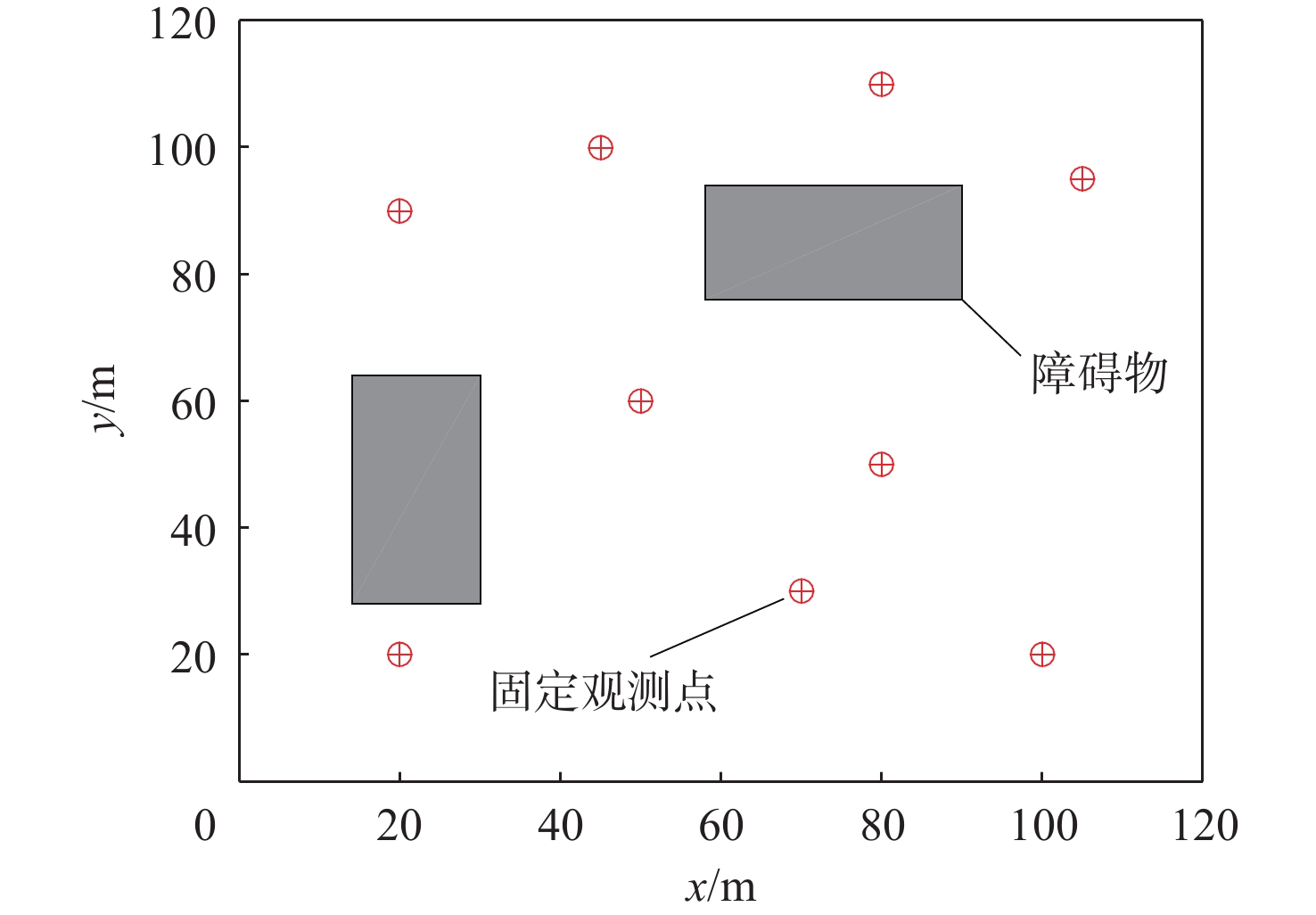
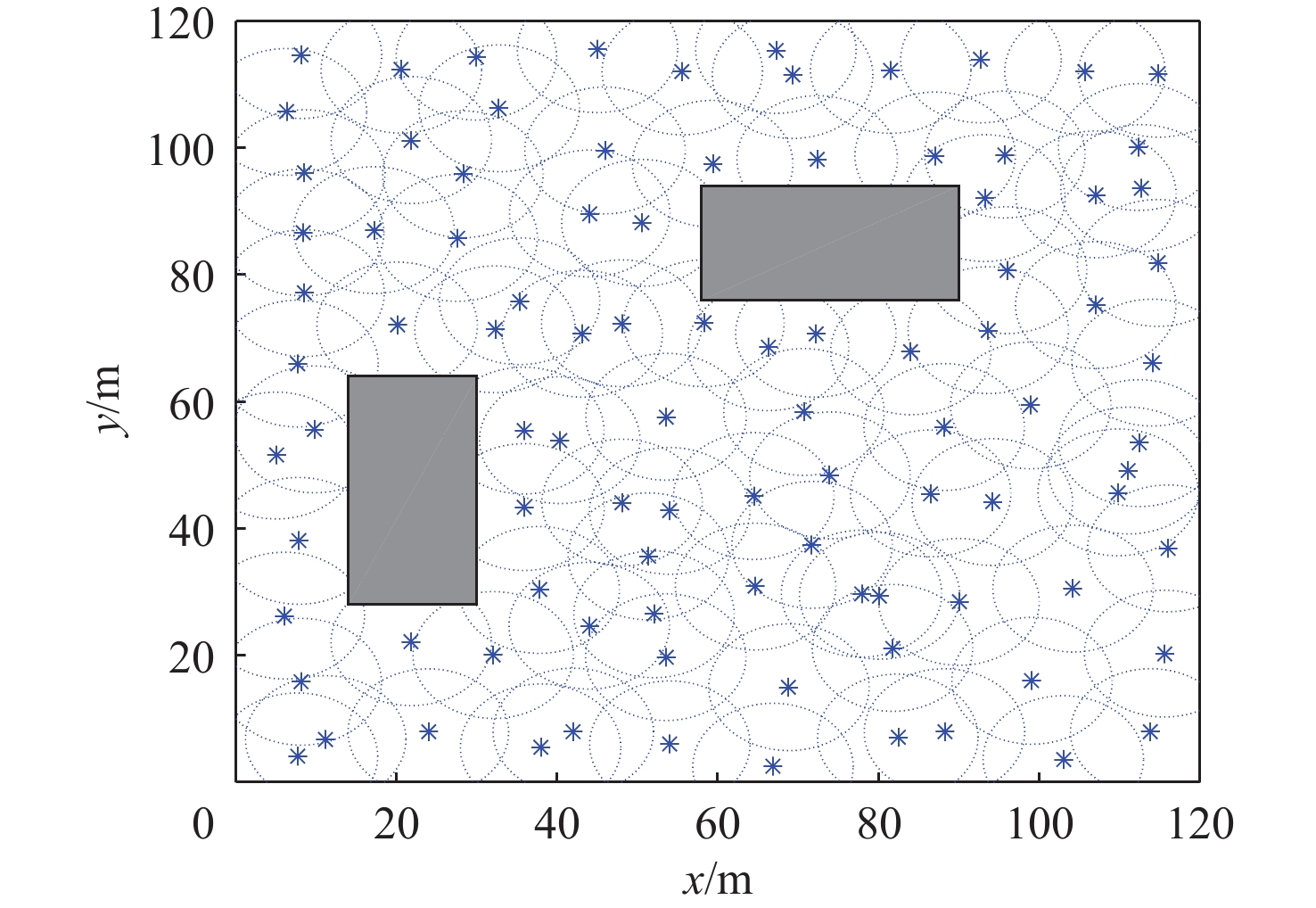
图 5 目标区域环境及固定观测点示意图
Figure 5. Schematic diagram of target area environment and fixed observation point
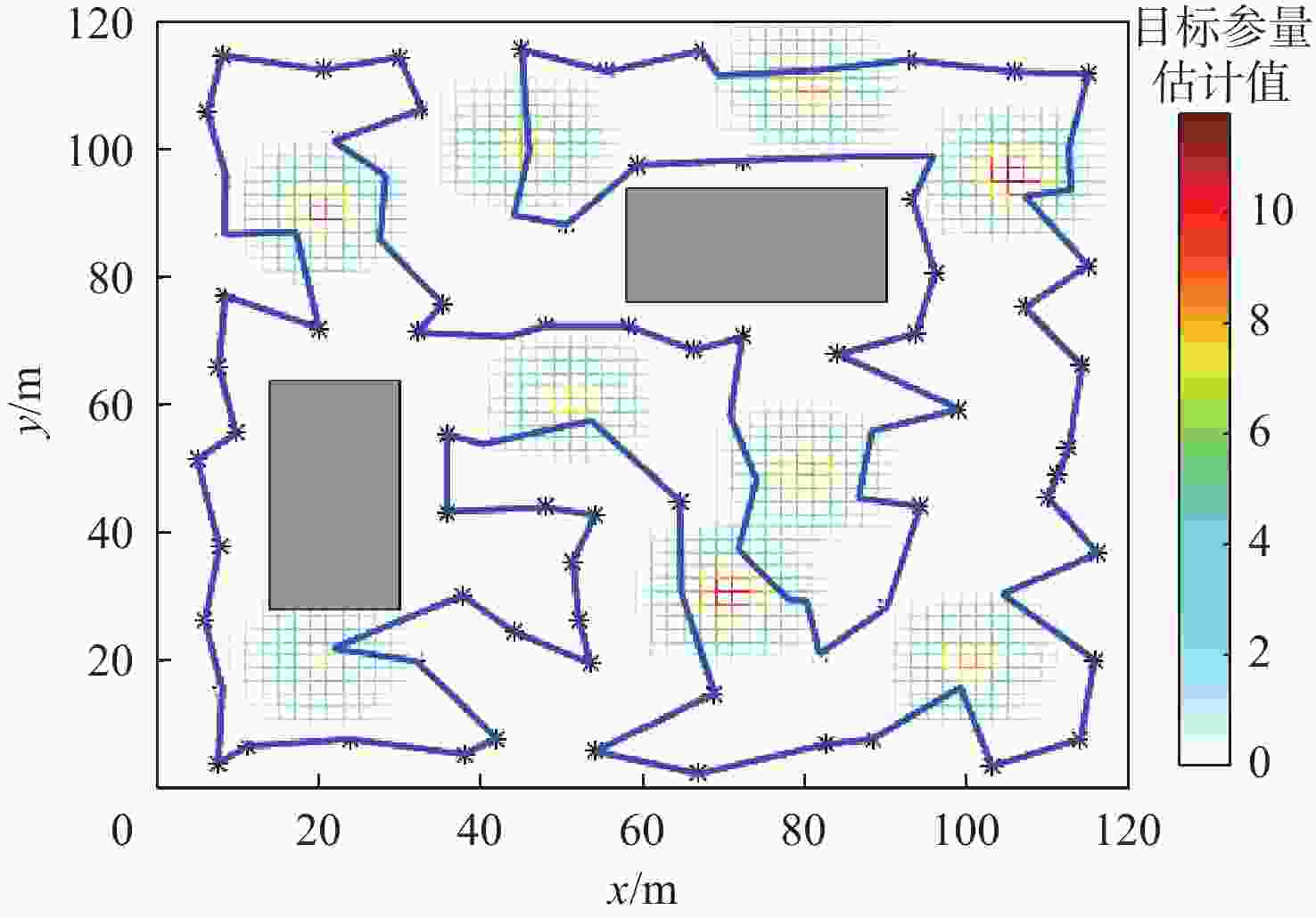
图 8 求解旅行商问题所得路径框架
Figure 8. Path framework obtained from solution to traveling salesman problem
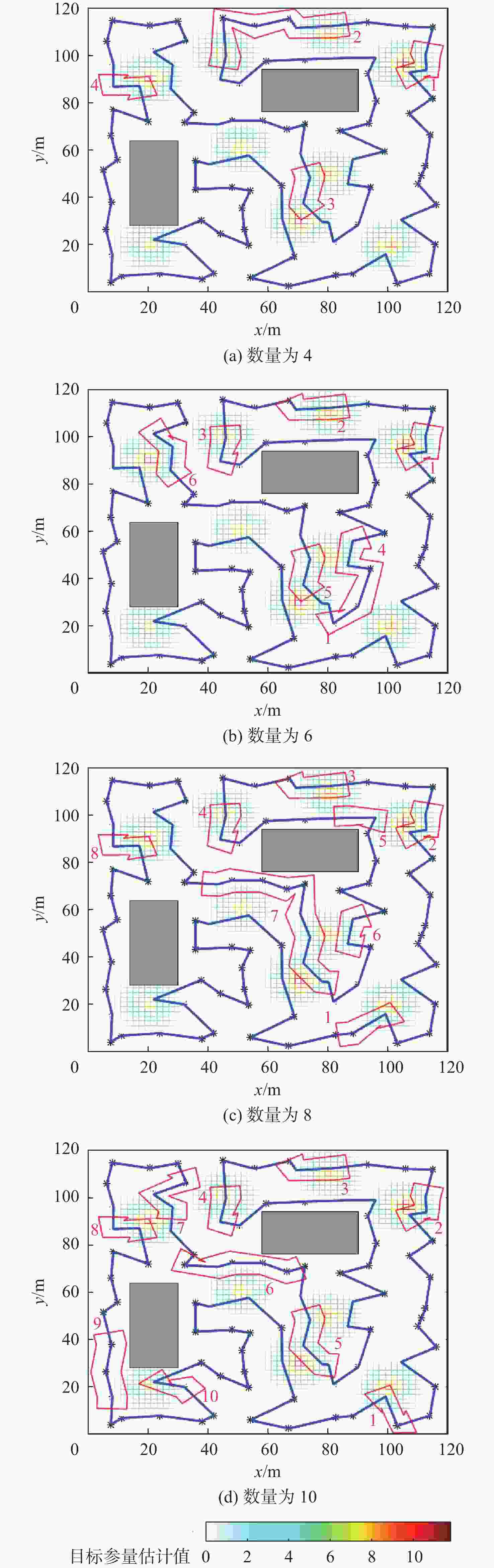
图 10 不同机器人投放数量时各机器人监视覆盖优化路径
Figure 10. Optimized monitoring coverage path of each robot with different deployment quantities
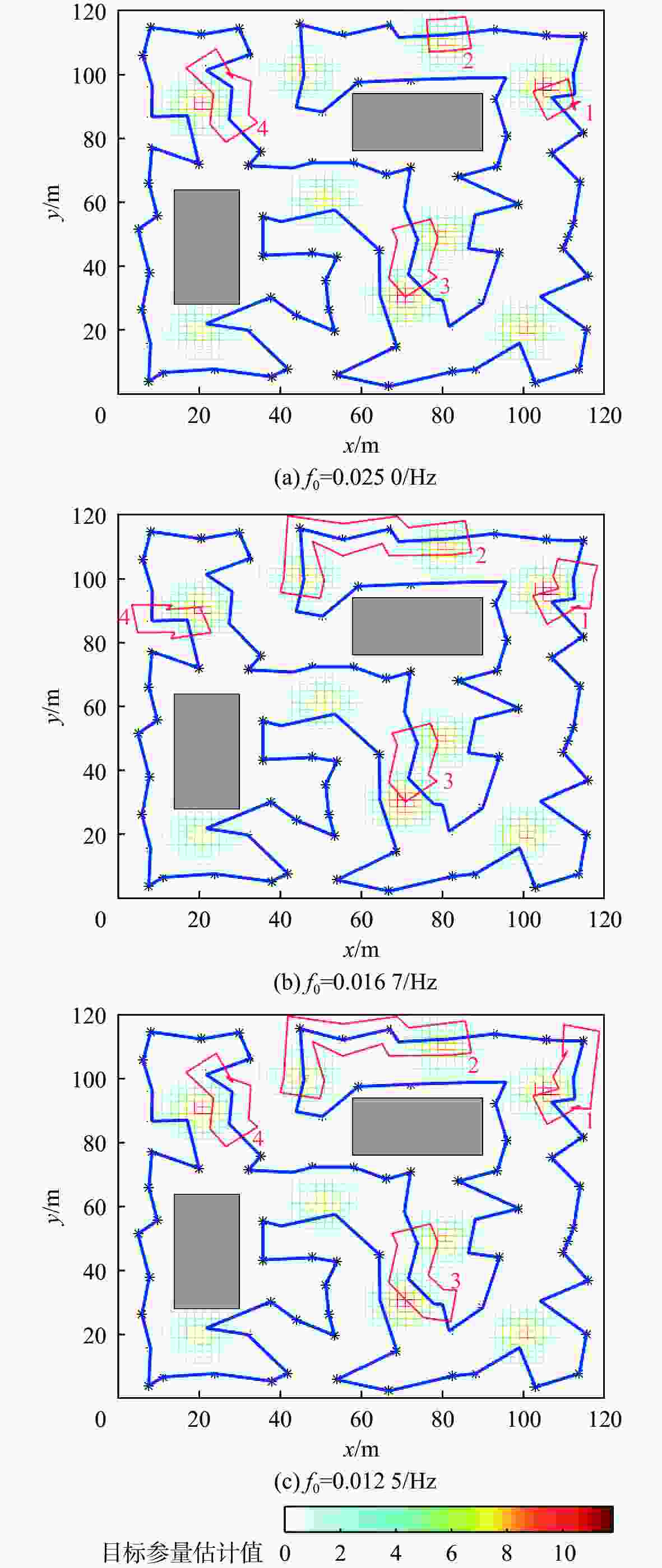
图 9 不同固定频率f0对路径规划的影响
Figure 9. Effect of different fixed frequencies f0 on path planning
表 1 不同固定频率f0下各机器人监视覆盖频率
Table 1. Monitoring coverage frequency of each robot with different fixed frequencies
Hz 机器人编号 f0=0.0250 f0=0.0167 f0=0.0125 1 0.0250 0.0155 0.0114 2 0.0250 0.0066 0.0066 3 0.0160 0.0160 0.0122 4 0.0130 0.0174 0.0130  下载: 导出CSV
下载: 导出CSV
表 2 不同机器人投放数量持续搜索时各机器人监视覆盖频率
Table 2. Monitoring coverage frequency of each robot with different number of robots
Hz 机器人编号 数量为4 数量为6 数量为8 数量为10 1 0.0155 0.0155 0.0149 0.0152 2 0.0066 0.0155 0.0155 0.0155 3 0.0160 0.0166 0.0155 0.0155 4 0.0174 0.0076 0.0166 0.0166 5 0.0160 0.0174 0.0122 6 0.0130 0.0163 0.0091 7 0.0053 0.0124 8 0.0174 0.0174 9 0.0117 10 0.0164
下载: 导出CSV
-
[1] CHOSET H M, LYNCH K M, HUTCHINSON S, et al. Principles of robot motion: Theory, algorithms, and implementation[M]. Cambridge: MIT Press, 2005: 162-168. [2] CHOSET H, ACAR E, RIZZI A A, et al. Exact cellular decompositions in terms of critical points of Morse functions[C]//Proceedings 2002 IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway: IEEE Press, 2002: 2270-2277. [3] ACAR E U, CHOSET H, RIZZI A A, et al. Morse decompositions for coverage tasks[J]. The International Journal of Robotics Research, 2002, 21(4): 331-344. doi: 10.1177/027836402320556359 [4] YAZICI A, KIRLIK G, PARLAKTUNA O, et al. A dynamic path planning approach for multirobot sensor-based coverage considering energy constraints[J]. IEEE Transactions on Cybernetics, 2014, 44(3): 305-314. doi: 10.1109/TCYB.2013.2253605 [5] GABRIELY Y, RIMON E. Spiral-STC: An on-line coverage algorithm of grid environments by a mobile robot[C]//Proceedings 2002 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2002: 954-960. [6] GAO C Q, KOU Y X, LI Z W, et al. Optimal multirobot coverage path planning: Ideal-shaped spanning tree[J]. Mathematical Problems in Engineering, 2018, 2018: 1-10. [7] KAPOUTSIS A C, CHATZICHRISTOFIS S A, KOSMATOPOULOS E B. DARP: Divide areas algorithm for optimal multi-robot coverage path planning[J]. Journal of Intelligent & Robotic Systems, 2017, 86(3): 663-680. [8] ZHOU X, WANG H M, DING B. How many robots are enough: A multi-objective genetic algorithm for the single-objective time-limited complete coverage problem[C]//2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2018: 2380-2387. [9] KRAUSE A, SINGH A, GUESTRIN C. Near-optimal sensor placements in Gaussian processes: Theory, efficient algorithms and empirical studies[J]. Journal of Machine Learning Research, 2008, 9(2): 235-284. [10] MOHAJERI K, PISHEHVAR G, SEIFI M. CMAC neural networks structures[C]//2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Piscataway: IEEE Press, 2010: 39-45. [11] MILLER W T, GLANZ F H, KRAFT L G. CMAC: An associative neural network alternative to backpropagation[J]. Proceedings of the IEEE, 1990, 78(10): 1561-1567. doi: 10.1109/5.58338 [12] SUTTON R S. Generalization in reinforcement learning: Successful examples using sparse coarse coding[C]//Proceedings of the 8th International Conference on Neural Information Processing Systems. New York: ACM, 1995: 1038–1044. [13] GENG Z J, MCCULLOUGH C L. Missile control using fuzzy cerebellar model arithmetic computer neural networks[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(3): 557-565. doi: 10.2514/2.4077 [14] FANG W B, CHAO F, YANG L Z, et al. A recurrent emotional CMAC neural network controller for vision-based mobile robots[J]. Neurocomputing, 2019, 334(C): 227-238. [15] SUN G B, ZHOU R, DI B, et al. A novel cooperative path planning for multi-robot persistent coverage with obstacles and coverage period constraints[J]. Sensors, 2019, 19(9): 1994. doi: 10.3390/s19091994 [16] SUTTON R, BARTO A著, 俞凯等译. 强化学习[M]. 北京: 电子工业出版社, 2019: 198-218.SUTTON R, BARTO A, Translated by Yu K et al. Reinforcement learning[M]. Beijing: Publishing House of Electronics Industry, 2019: 198-218(in Chinese). [17] WANG Y C, TSENG Y C. Distributed deployment schemes for mobile wireless sensor networks to ensure multilevel coverage[J]. IEEE Transactions on Parallel and Distributed Systems, 2008, 19(9): 1280-1294. doi: 10.1109/TPDS.2007.70808 [18] CHANG C Y, CHANG C T, CHEN Y C, et al. Obstacle-resistant deployment algorithms for wireless sensor networks[J]. IEEE Transactions on Vehicular Technology, 2009, 58(6): 2925-2941. doi: 10.1109/TVT.2008.2010619 [19] LEE J Y, SEOK J H, LEE J J. Multiobjective optimization approach for sensor arrangement in a complex indoor environment[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C, 2012, 42(2): 174-186. doi: 10.1109/TSMCC.2010.2103310 [20] SEOK J H, LEE J Y, KIM W, et al. A bipopulation-based evolutionary algorithm for solving full area coverage problems[J]. IEEE Sensors Journal, 2013, 13(12): 4796-4807. doi: 10.1109/JSEN.2013.2274693 [21] GHOSH A, DAS S K. Coverage and connectivity issues in wireless sensor networks: A survey[J]. Pervasive and Mobile Computing, 2008, 4(3): 303-334. doi: 10.1016/j.pmcj.2008.02.001 -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 231
- HTML全文浏览量: 68
- PDF下载量: 20
- 被引次数: 0
