



Design of robust controller for single outrigger of vibration active isolation platform based on LPV
-
摘要:
利用控制力矩陀螺(CMG)实现敏捷姿态机动控制时,保证机动过程控制输出力矩快速响应的同时,还需要保证机动到位后有效隔离CMG的机械振动以实现高稳定度姿态控制。针对控制CMG主动隔振平台,将控制CMG外框角速度作为变参数,提出单支腿主动隔振平台控制器的一种基于线性变参数(LPV)控制设计实现方法,通过与其他主动隔振控制方法性能比较分析,所提方法在兼顾敏捷姿态机动期间和机动到位后对主动隔振平台不同的力学传递要求方面有更好的性能。
Abstract:When the control moment gyro (CMG) is used to achieve agile attitude maneuvering control, the mechanical CMG vibration should be effectively isolated after the maneuvering is in place to achieve high-stability attitude control, while the rapid response of the control output torque is ensured during the maneuvering. This paper presents a design of outrigger controller for CMG vibration isolation platform based on linear parameter varying (LPV), setting the angular velocity of the CMG outer frame as a variable parameter. A comparison with other active vibration isolation methods demonstrates better performance of the design in different mechanical transmission requirements for the vibration isolation platform during agile attitude maneuvering and after the maneuvering in place.
-
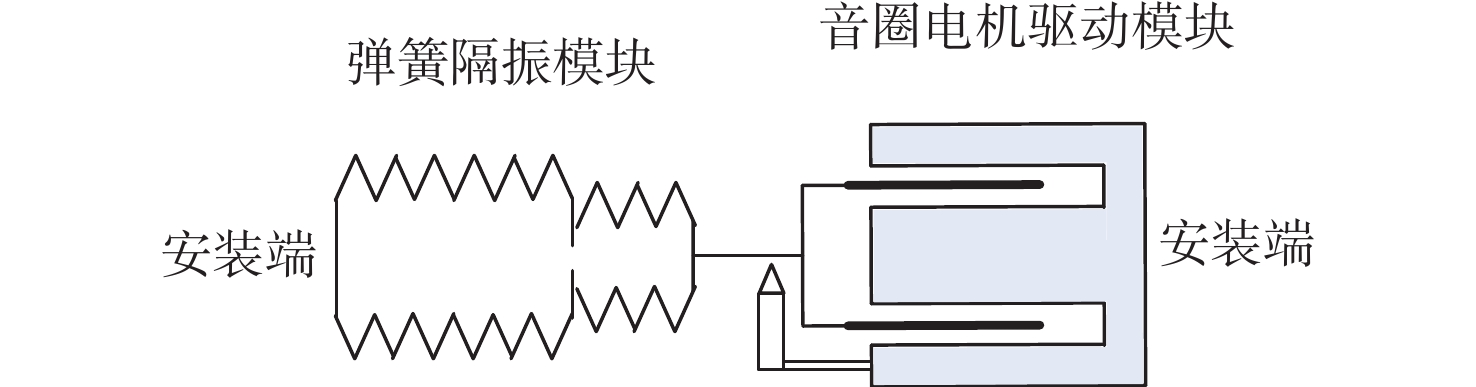
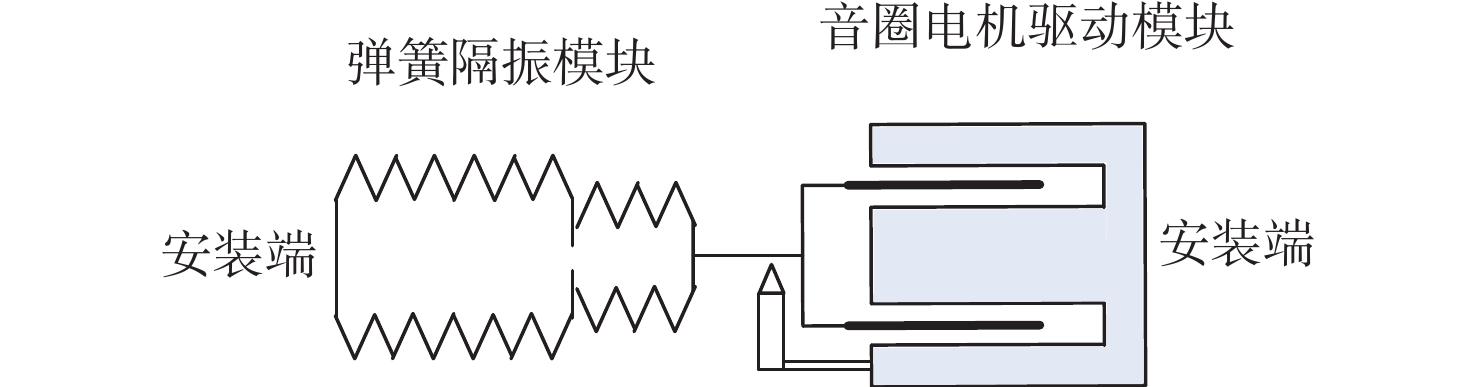
图 1 单支腿隔振的简化结构模型
Figure 1. Simplified structure model of single vibration isolation outrigger
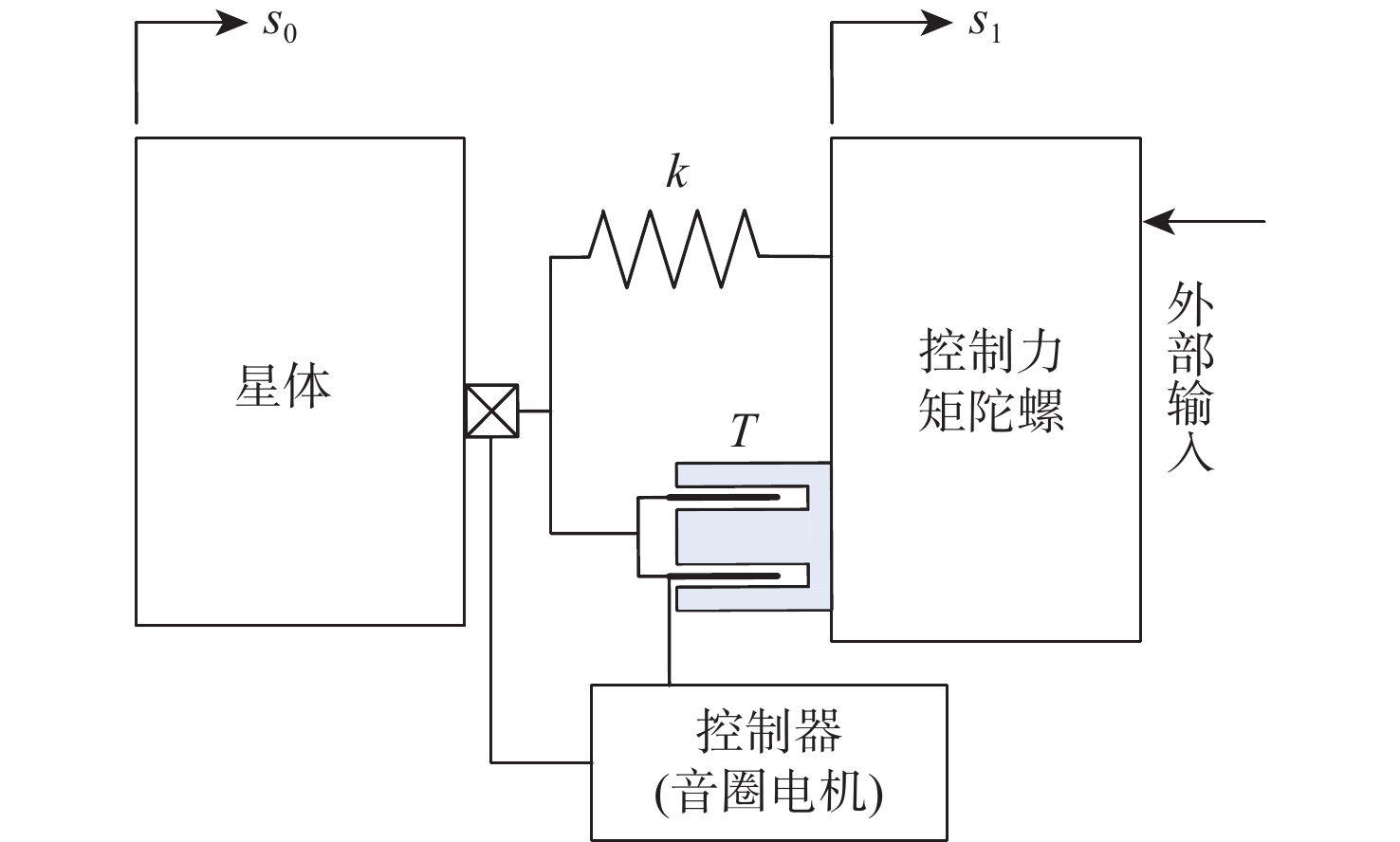
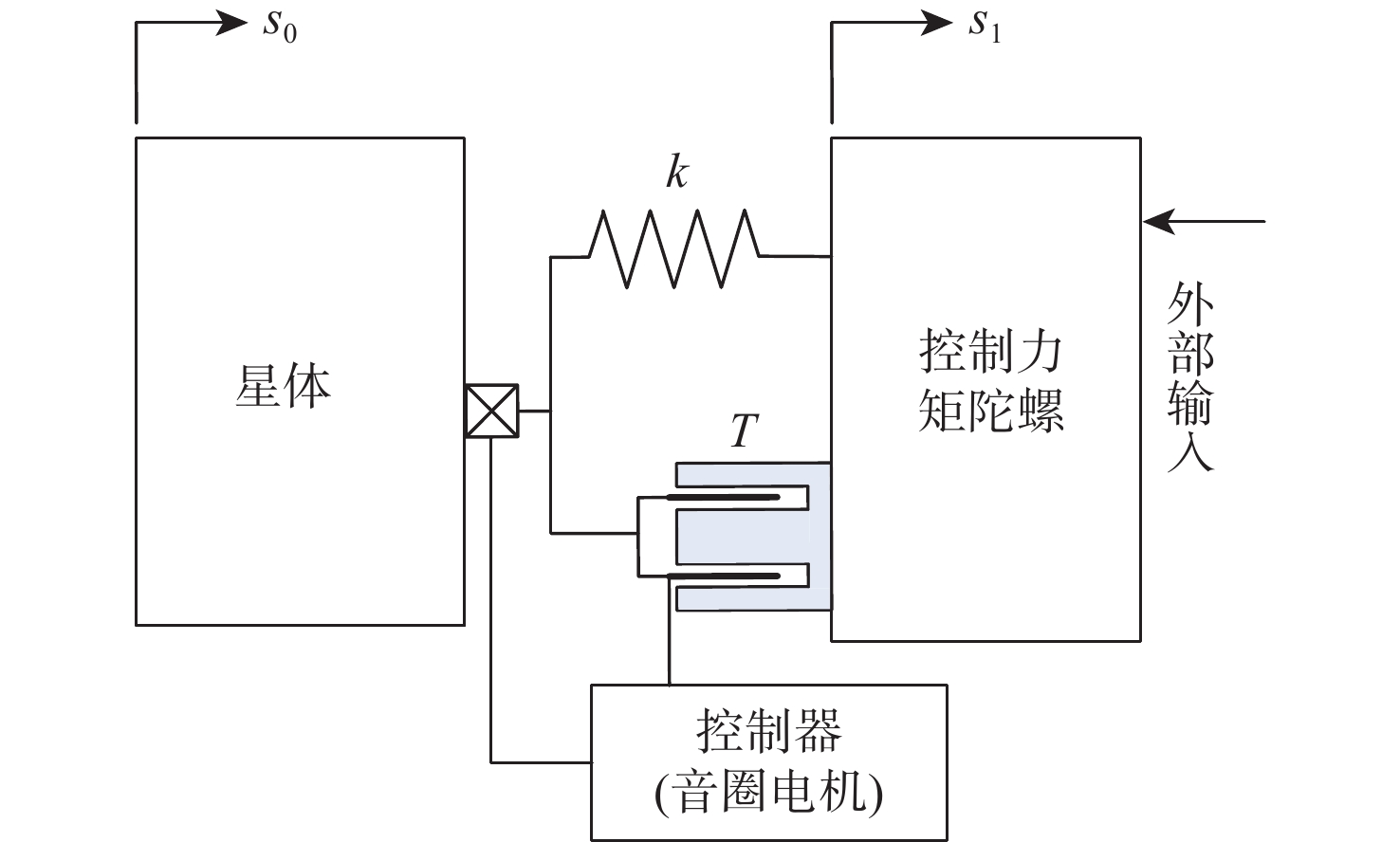
图 2 单支腿主动隔振平台控制器动力学模型
Figure 2. Dynamic model of single leg isolation platform controller

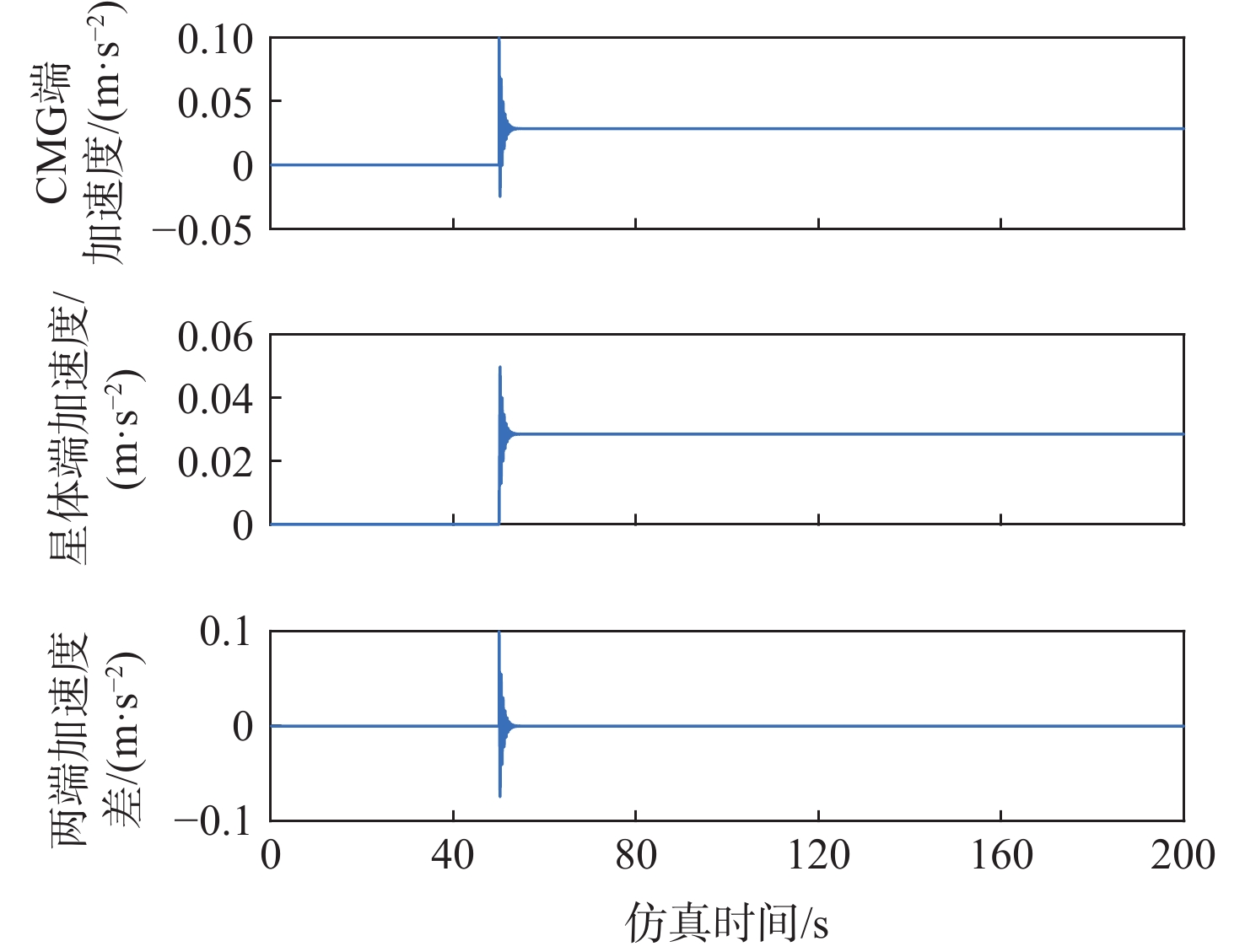
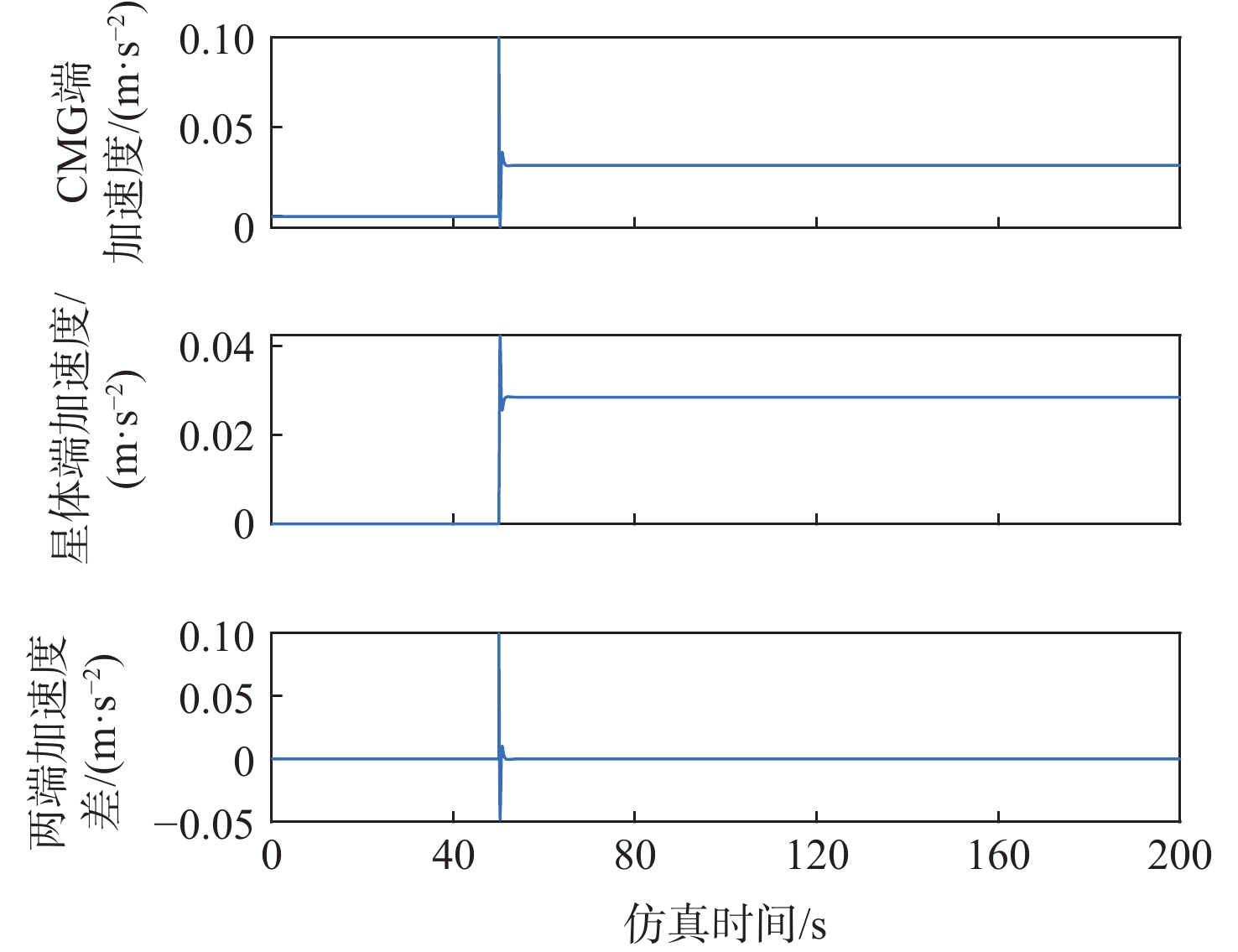
图 10 高频干扰(fc=25 Hz)输入本文LPV控制器
Figure 10. LPV controller of high frequency interference (fc=25 Hz) input
表 1 不同控制器的隔振性能比较
Table 1. Comparison of vibration isolation performance with different controllers
控制器类型
(fc=25 Hz)CMG端
加速度/(m·s−2)星体端加
速度/(m·s−2)稳态调节
时间ts/s振动衰
减率σ/%PID 0.1004 0.00018 9.360 99.82 H∞ 0.1008 0.00035 4.330 99.65 本文LPV 0.1009 0.00036 2.448 99.64  下载: 导出CSV
下载: 导出CSV
-
[1] 张尧, 张景瑞. 隔振平台对姿态控制系统影响分析及参数选择[J]. 宇航学报, 2013, 34(5): 657-664.ZHANG Y, ZHANG J R. Analysis of influence of vibration isolation platform on attitude control system and its parameter selection[J]. Journal of Astronautics, 2013, 34(5): 657-664(in Chinese). [2] 焦健. 柔性连接主动隔振平台的动力学建模与试验研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.JIAO J. Dynamic modeling and experimental research on active vibration isolation platform with flexible connection[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). [3] 李文强. LPV系统鲁棒变增益控制研究及其应用[D]. 长沙: 国防科学技术大学, 2009.LI W Q. Research and application of robust gain-scheduling based on LPV system[D]. Changsha: National University of Defense Technology, 2009 (in Chinese). [4] APKARIAN P, GAHINET P. A convex characterization of gain-scheduled H∞ controllers[J]. IEEE Transactions on Automatic Control, 1995, 40(5): 853-864. doi: 10.1109/9.384219 [5] APKARIAN P, ADAMS R J. Advanced gain-scheduling techniques for uncertain systems[J]. IEEE Transactions on Control Systems Technology, 1998, 6(1): 21-32. doi: 10.1109/87.654874 [6] 虞忠伟, 胡东, 陈辉堂. 基于LPV方法的机器人鲁棒H∞控制[C]// 第十九届中国控制会议. 北京: 中国自动化学会控制理论专业委员会, 2000: 715-719.YU Z W, HU D, CHEN H T. Robust H∞ control of robot based on LPV method[C]//Proceedings of the 19th Chinese Control Conference. Beijing: TCCT Press, 2000: 715-719(in Chinese). [7] 虞忠伟, 陈辉堂. 机器人多胞变增益输出反馈H∞控制[J]. 控制理论与应用, 2003, 20(6): 925-932.YU Z W, CHEN H T. Polytopic gain scheduling output feedback H∞control for robotic manipulators[J]. Control Theory & Applications, 2003, 20(6): 925-932(in Chinese). [8] 孙斌, 杨凌宇, 张晶. 基于高阶奇异值分解的LPV鲁棒控制器设计[J]. 北京航空航天大学学报, 2016, 42(7): 1536-1542. doi: 10.13700/j.bh.1001-5965.2015.0486SUN B, YANG L Y, ZHANG J. Robust LPV control design based on HOSVD[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1536-1542. doi: 10.13700/j.bh.1001-5965.2015.0486 [9] GAHINET P, APKARIAN P. A linear matrix inequality approach to H∞ control[J]. International Journal of Robust and Nonlinear Control, 1994, 4(4): 421-448. doi: 10.1002/rnc.4590040403 [10] 俞立. 鲁棒控制—线性矩阵不等式处理方法[M]. 北京: 清华大学出版社, 2002: 20-40.YU L. Robust control linear matrix inequality processing method[M]. Beijing: Tsinghua University Press, 2002: 20-40(in Chinese). [11] DE MARNEFFE B, AVRAAM M, DERAEMAEKER A, et al. Vibration isolation of precision payloads: A six-axis electromagnetic relaxation isolator[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 395-401. doi: 10.2514/1.39414 [12] CHILALI M, GAHINET P. H∞ design with pole placement constraints: An LMI approach[J]. IEEE Transactions on Automatic Control, 1996, 41(3): 358-367. doi: 10.1109/9.486637 [13] 胡艳梅. 线性参变系统的有限时间控制及其应用[D]. 哈尔滨: 哈尔滨工业大学, 2020.HU Y M. Finite-time control for linear parameter-varying system and its application[D]. Harbin: Harbin Institute of Technology, 2020 (in Chinese). [14] 乔盼盼. 一类LPV系统的最优控制数值解问题[D]. 大连: 大连理工大学, 2020.QIAO P P. Numerical solution of optimal control for a class of LPV systems[D]. Dalian: Dalian University of Technology, 2020 (in Chinese). [15] 温暖, 刘正华, 祝令谱, 等. 非仿射参数依赖LPV模型的变体飞行器H∞控制[J]. 北京航空航天大学学报, 2017, 43(10): 2073-2080.WEN N, LIU Z H, ZHU L P, et al. H∞ control for morphing aircraft via non-affine parameter dependent LPV model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 2073-2080(in Chinese). -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 201
- HTML全文浏览量: 56
- PDF下载量: 9
- 被引次数: 0
