



Point cloud registration algorithm for non-cooperative targets based on Hough transform
-
摘要:
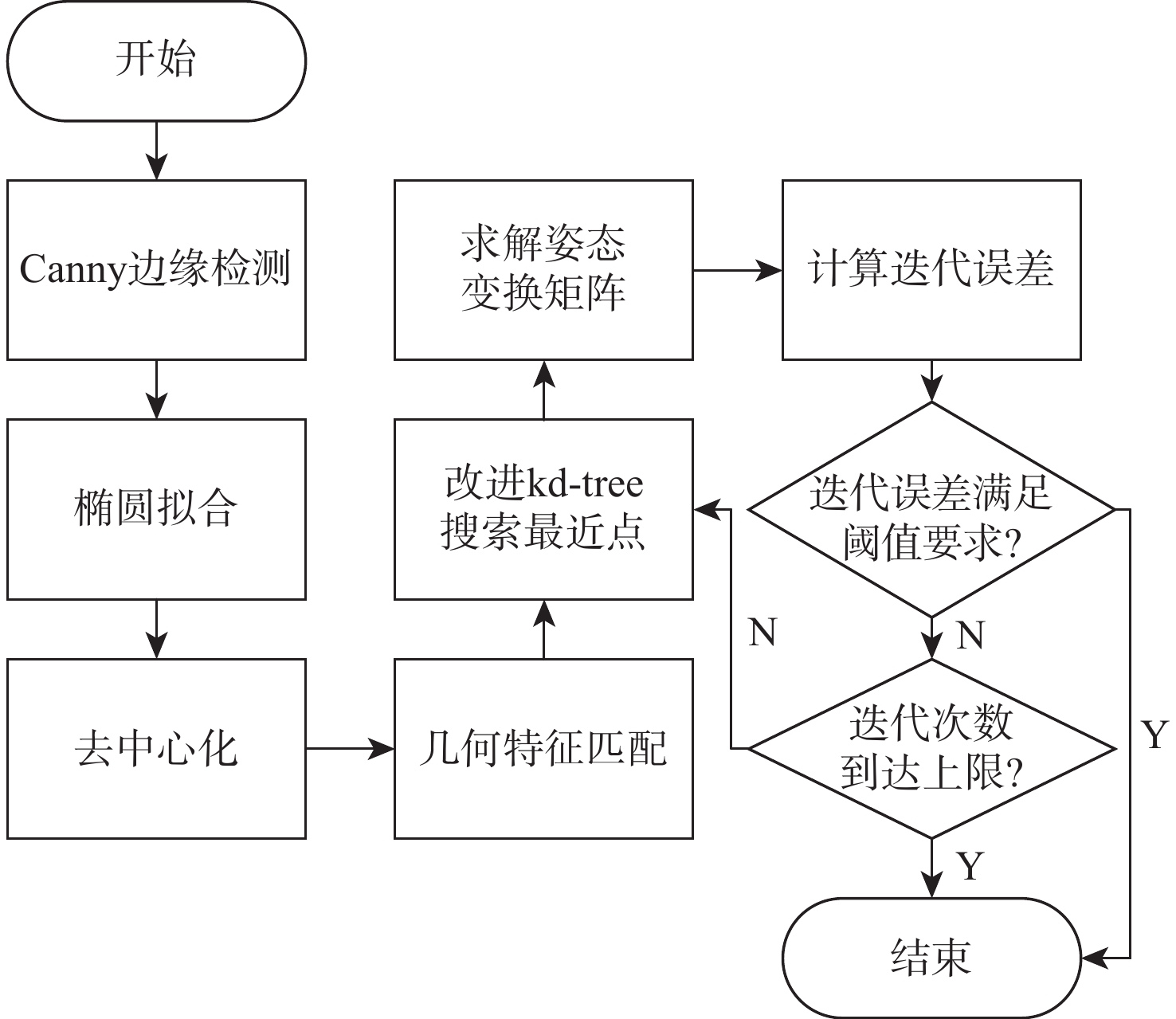
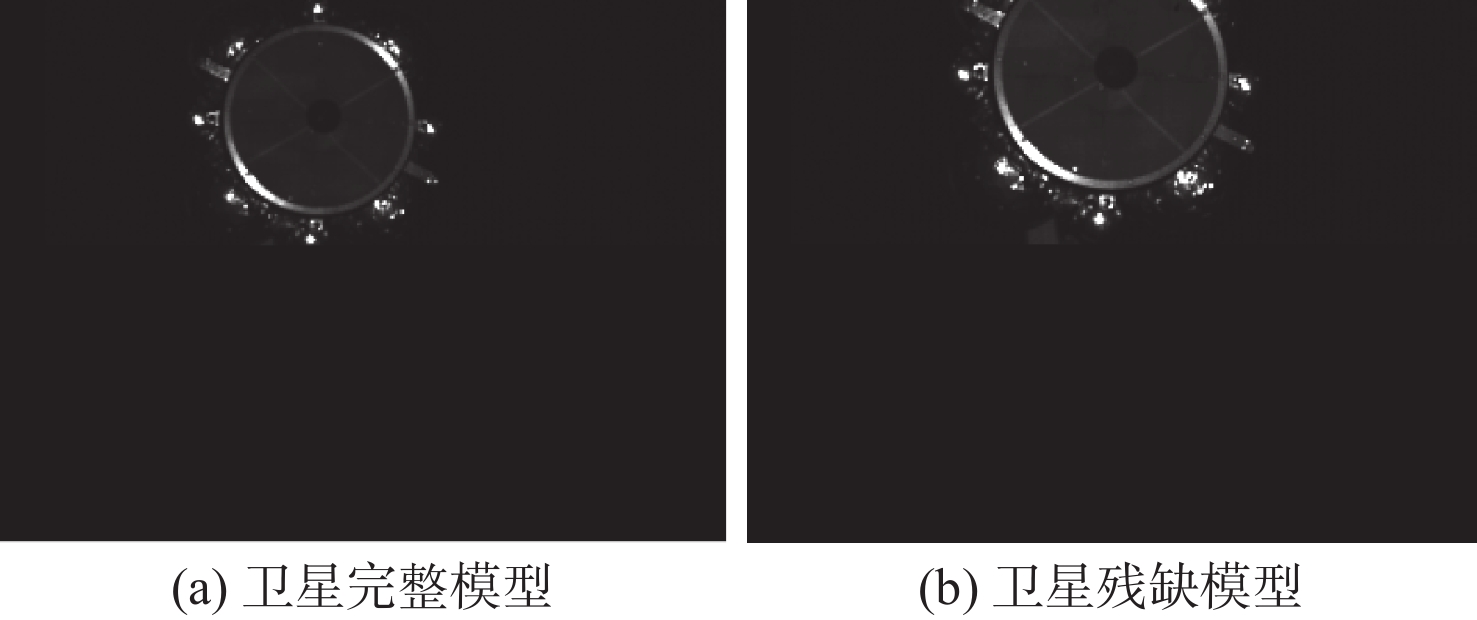
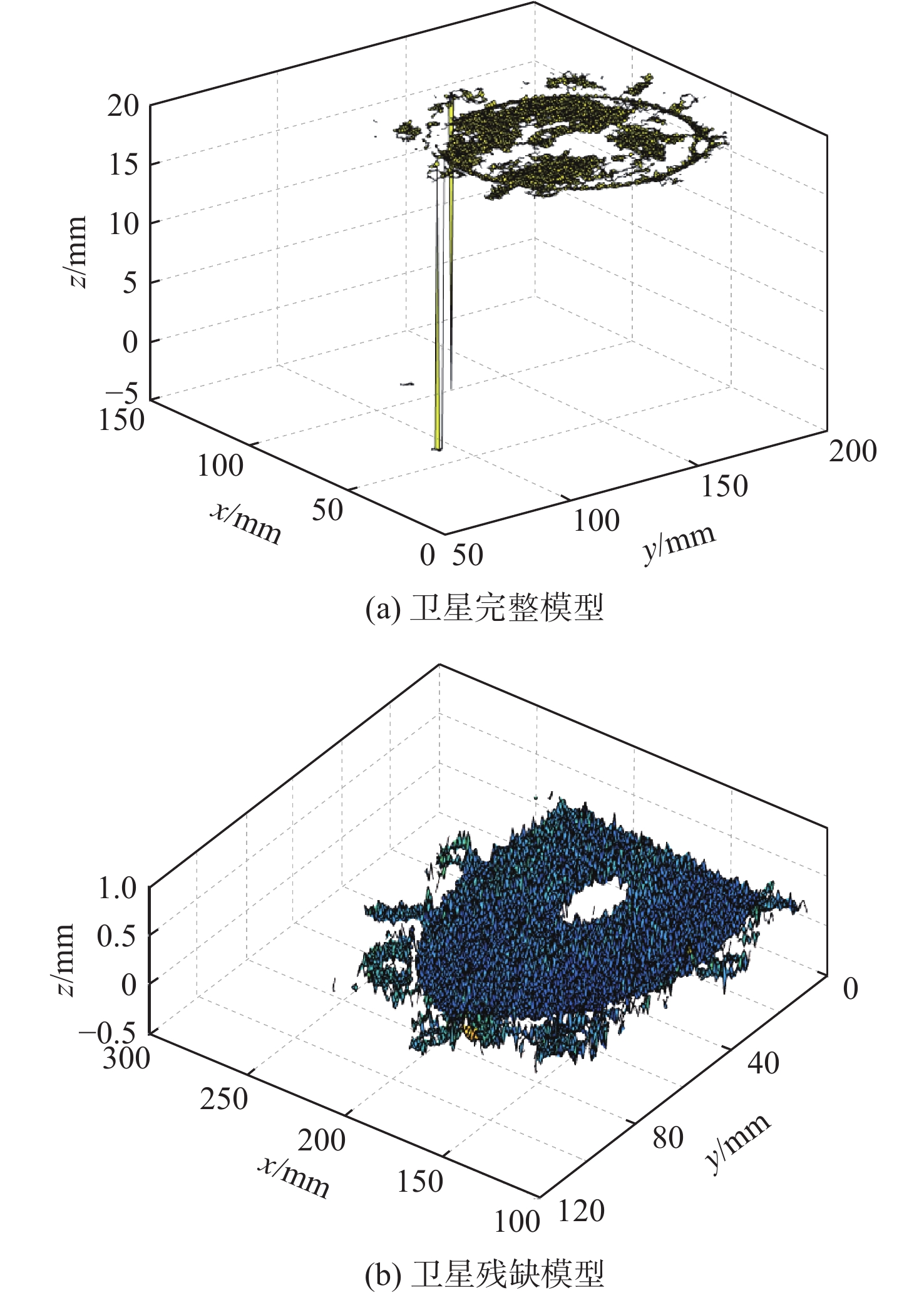
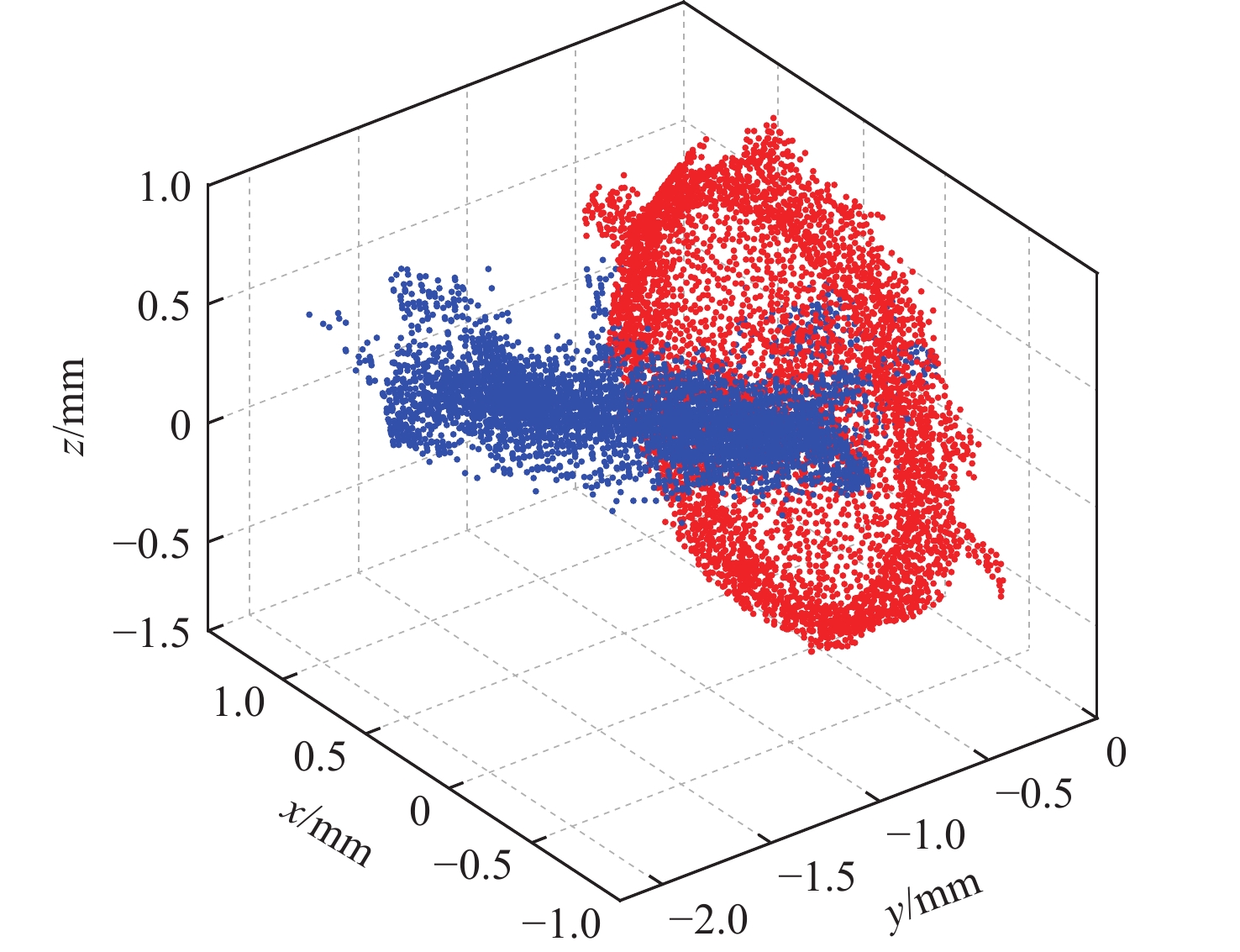
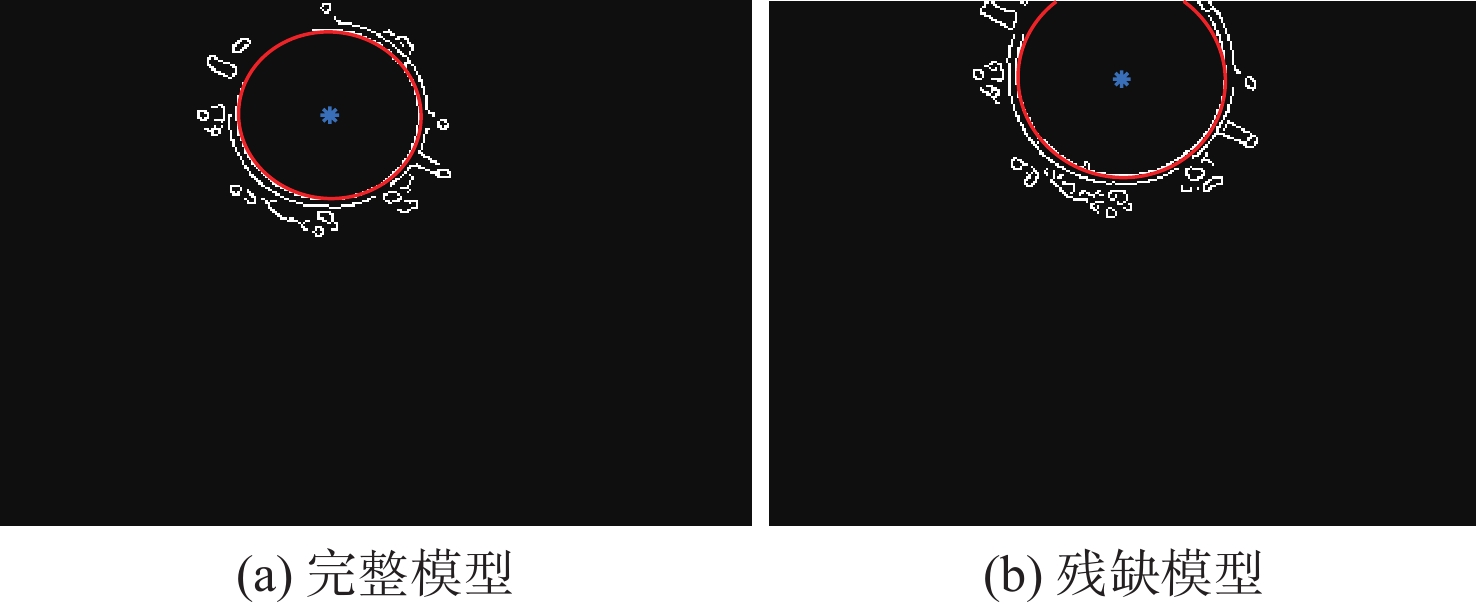
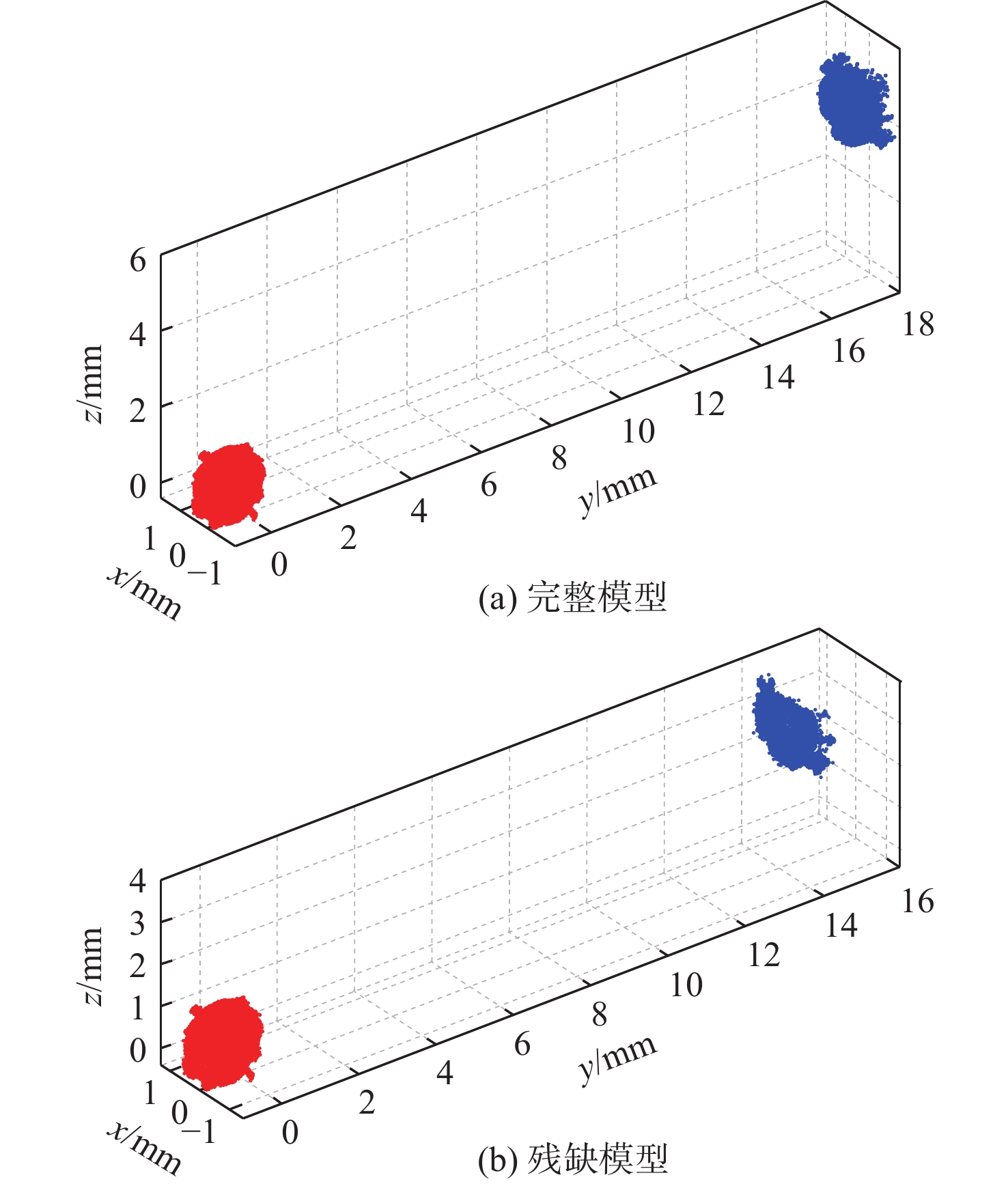
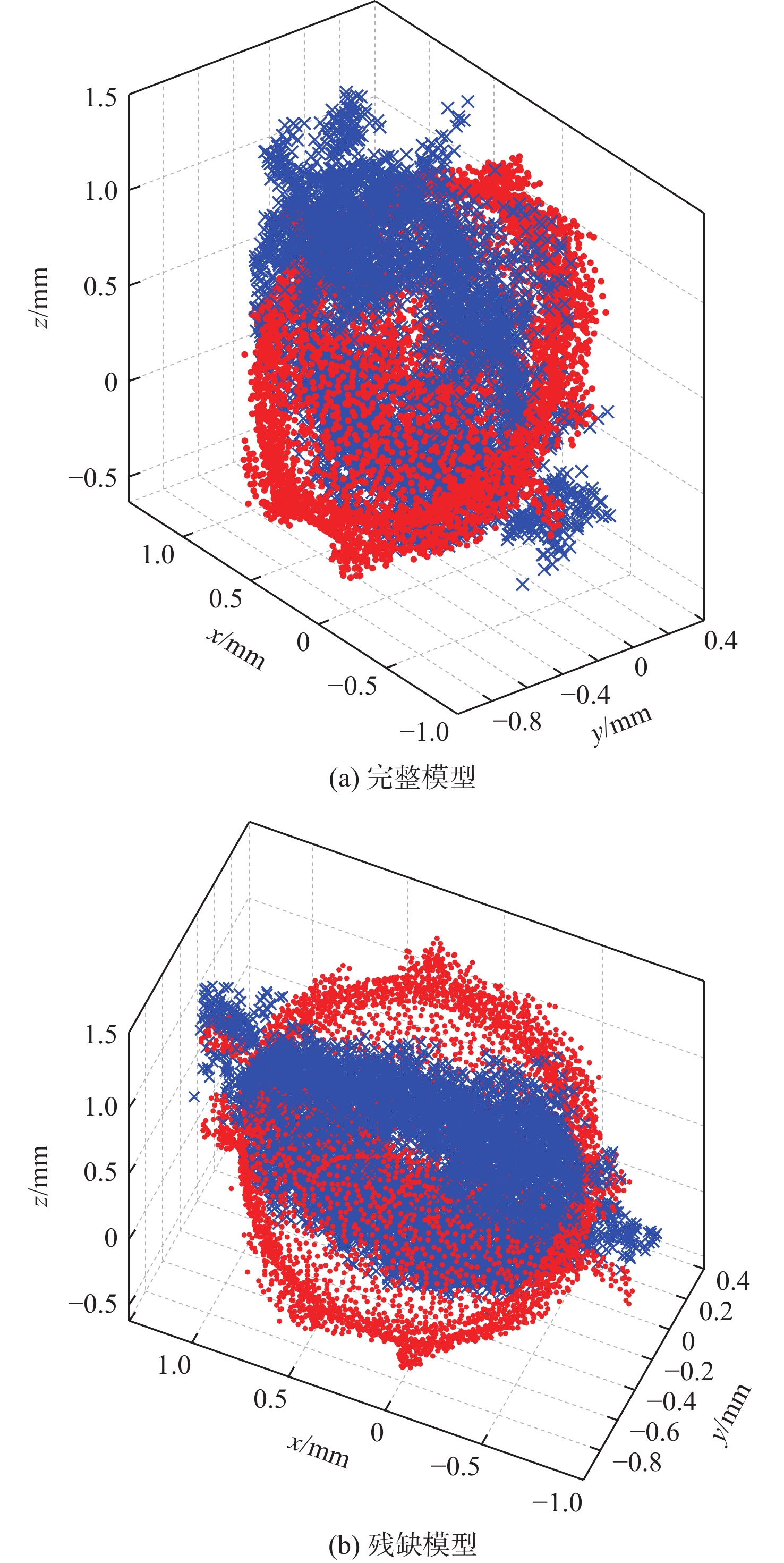
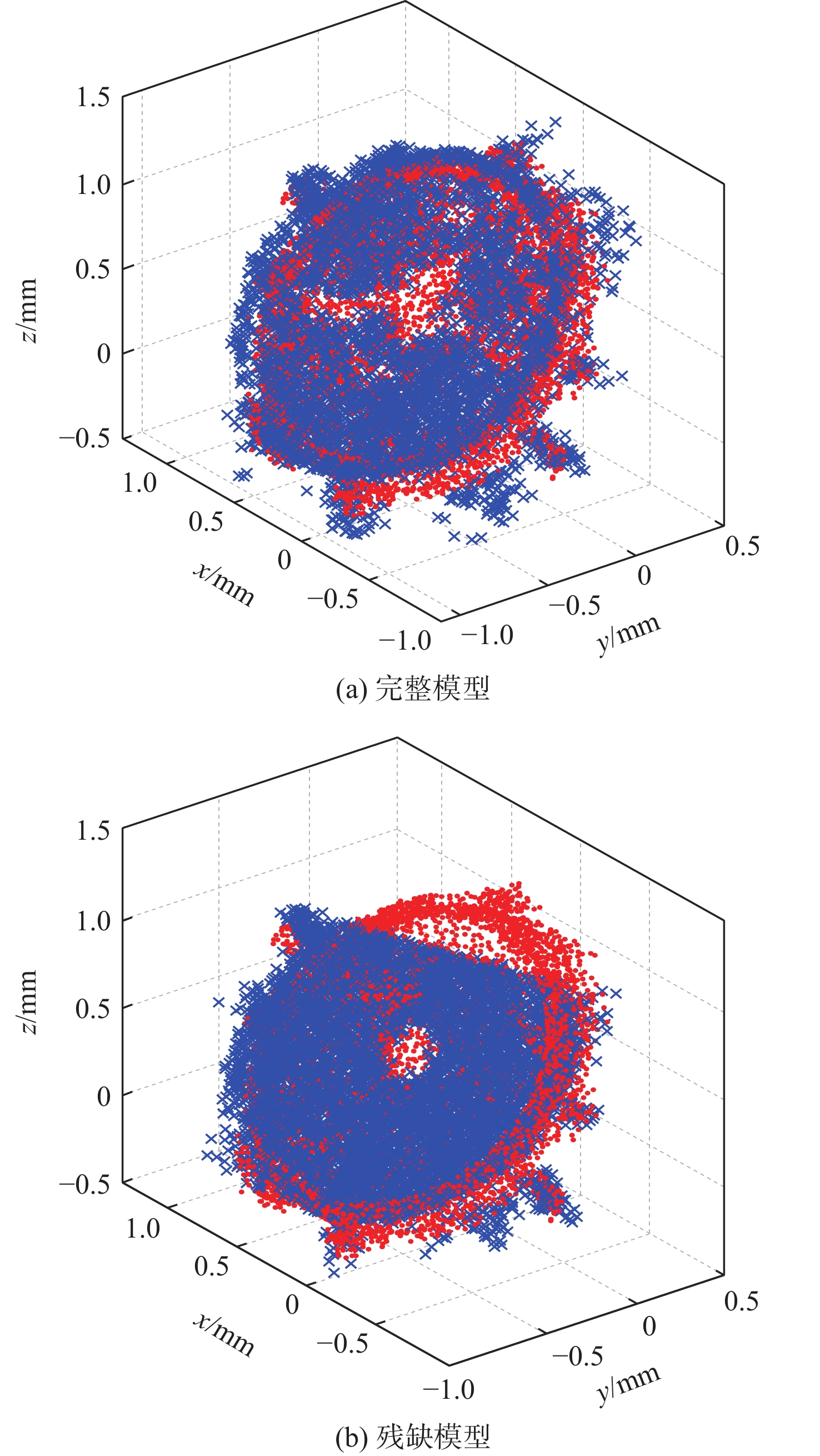
针对空间非合作目标点云配准过程中目标残缺、机动过快等问题,对飞行时间深度(TOF)相机点云配准过程进行研究。利用相机可同时获取灰度与深度图的特点,提出一种基于霍夫变换的点云配准算法,在提供精确初始位姿的同时,也加速了最近点搜索过程。对TOF相机摄得灰度图进行边缘检测,利用边缘点以随机霍夫变换的方法拟合椭圆中心,使待配准点云与参考点云中心配准。随后检测图像几何特征,与对应参考点特征相配,提高初始位姿精度,既避免所提算法陷入局部最小,也可解决目标点云缺失无法配准的难题。在最近点搜索过程中,引入kd-tree改进算法,以$3\sigma $准则剔除单次k邻近的离群点,提高了相机动态性能。以某实拍卫星模型对所提算法进行仿真分析,成功验证了其对于残缺目标配准的可行性与鲁棒性。同时,在完整与残缺点云目标下,所提算法较于常规霍夫变换法相比分别提速955.3%和440.4%,且精度相当,具有较为广泛的应用前景。
Abstract:To solve the problems of missing and fast maneuvering non-cooperative space targets during the point cloud registration, this study examines the point cloud registration process of time-of-flight (TOF) cameras. It proposes a point cloud registration strategy based on Hough transform, utilizing the feature of the TOF camera in obtaining grayscale and depth maps at the same time. This strategy accelerates the closest point search while providing accurate initial poses. Firstly, edge detection is performed on the gray image taken by the TOF camera, and the ellipse center is fitted by the method of random Hough transform, using the edge points. The query point cloud is thus registered with the center of the model point cloud. Then, the geometric features of the image are detected and matched with the features of the corresponding model points to improve the accuracy of the initial pose. This study not only prevents the algorithm from falling into the local minimum, but also successfully solves the problem that the missing target point cloud could not be registered. Finally, in the process of the closest point search, an improved kd-tree method is introduced, and the single k-nearest neighbors are eliminated by the 3σ criterion, improving the dynamic performance of the camera. The algorithm is simulated and analyzed with a real satellite model, successfully verifying its feasibility and robustness for incomplete target registration. Furthermore, the algorithm is 955.3 and 440.4% faster than the that of the traditional Hough transform registration for intact and missing targets. Therefore, the proposed algorithm has a wider application prospect.
-
Key words:
- non-cooperative targets /
- point cloud registration /
- TOF camera /
- Hough transform /
- crippled target
-
[1] 梁斌, 徐文福, 李成, 等. 地球静止轨道在轨服务技术研究现状与发展趋势[J]. 宇航学报, 2010, 31(1): 1-13. doi: 10.3873/j.issn.1000-1328.2010.01.001LIANG B, XU W F, LI C, et al. The status and prospect of orbital servicing in the geostationary orbit[J]. Journal of Astronautics, 2010, 31(1): 1-13(in Chinese). doi: 10.3873/j.issn.1000-1328.2010.01.001 [2] 贾佳璐, 应忍冬, 潘光华, 等. 基于TOF相机的三维重建技术[J]. 计算机应用与软件, 2020, 37(4): 127-131. doi: 10.3969/j.issn.1000-386x.2020.04.021JIA J L, YING R D, PAN G H, et al. 3D reconstruction based on TOF camera[J]. Computer Applications and Software, 2020, 37(4): 127-131(in Chinese). doi: 10.3969/j.issn.1000-386x.2020.04.021 [3] 胡文俊, 马秀丽. 基于TOF相机和级联卷积网络的人头检测[J]. 电视技术, 2020, 44(7): 41-44. doi: 10.16280/j.videoe.2020.07.010HU W J, MA X L. Head detection based on TOF camera and cascade convolutional network[J]. Video Engineering, 2020, 44(7): 41-44(in Chinese). doi: 10.16280/j.videoe.2020.07.010 [4] 徐国晟, 訚胜利, 陈浩. 一种基于tof相机的多场景人数统计方法: 中国, CN110674672A[P]. 2020-10-27.XU G S, YIN S L, CHEN H. Multi-scene people counting method based on tof camera: China, CN110674672A[P]. 2020-10-27 (in Chinese). [5] 魏立松. 基于双目立体视觉的障碍物检测研究[D]. 西安: 西安电子科技大学, 2020 .WEI L S. Research on obstacle detection based on binocular stereo vision[D]. Xi'an: Xidian University, 2020 (in Chinese). [6] 唐昆. 两栖球形机器人水下定位系统研究[D]. 北京: 北京理工大学, 2020.TANG K. Research on underwater positioning system of amphibious spherical robot [D]. Beijing: Beijing Institute of Technology, 2020(in Chinese). [7] OUMER N W, PANIN G. 3D point tracking and pose estimation of a space object using stereo images[C]//Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012). Piscataway: IEEE Press, 2013: 796-800. [8] 梁斌, 何英, 邹瑜, 等. TOF相机在空间非合作目标近距离测量中的应用[J]. 宇航学报, 2016, 37(9): 1080-1088.LIANG B, HE Y, ZOU Y, et al. Application of time-of-flight camera for relative measurement of non-cooperative target in close range[J]. Journal of Astronautics, 2016, 37(9): 1080-1088(in Chinese). [9] PONTIL M, VERRI A. Support vector machines for 3D object recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(6): 637-646. doi: 10.1109/34.683777 [10] BOGE T, WIMMER T, MA O, et al. EPOS-using robotics for RvD simulation of on-orbit servicing missions[C]//AIAA Modeling and Simulation Technologies Conference. Reston: AIAA, 2010. [11] 王志超. 非合作航天器视觉位姿测量方法的研究[D]. 哈尔滨: 哈尔滨工业大学, 2013 .WANG Z C. Research on visual pose measurement method of non-cooperative spacecraft[D]. Harbin: Harbin Institute of Technology, 2013 (in Chinese). [12] 闫小盼, 敖磊, 杨新. 基于TOF相机的非合作矩形目标三维位姿测量方法[J]. 计算机应用研究, 2018, 35(9): 2856-2860. doi: 10.3969/j.issn.1001-3695.2018.09.070YAN X P, AO L, YANG X. Three-dimensional pose measurement method of non-cooperative rectangular target based on time-of-flight camera[J]. Application Research of Computers, 2018, 35(9): 2856-2860(in Chinese). doi: 10.3969/j.issn.1001-3695.2018.09.070 [13] 戴静兰, 陈志杨, 叶修梓. ICP算法在点云配准中的应用[J]. 中国图象图形学报, 2007, 12(3): 517-521. doi: 10.3969/j.issn.1006-8961.2007.03.023DAI J L, CHEN Z Y, YE X Z. The application of ICP algorithm in point cloud alignment[J]. Journal of Image and Graphics, 2007, 12(3): 517-521(in Chinese). doi: 10.3969/j.issn.1006-8961.2007.03.023 [14] 刘剑, 白迪. 基于特征匹配的三维点云配准算法[J]. 光学学报, 2018, 38(12): 232-239.LIU J, BAI D. 3D point cloud registration algorithm based on feature matching[J]. Acta Optica Sinica, 2018, 38(12): 232-239(in Chinese). [15] 鄢莹. 基于鲁棒统计学方法的迭代最近点算法研究[D]. 武汉: 华中科技大学, 2014.YAN Y. Research on iterative nearest point algorithm based on robust statistical method[D]. Wuhan: Huazhong University of Science and Technology, 2014 (in Chinese). [16] BESL P J, MCKAY N D. A method for registration of 3D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. doi: 10.1109/34.121791 [17] 吕琼琼. 激光雷达点云数据的三维建模技术[D]. 北京: 北京交通大学, 2009 .LV Q Q. Three-dimensional modeling technology of lidar point cloud data[D]. Beijing: Beijing Jiaotong University, 2009 (in Chinese). [18] ILLINGWORTH J, KITTLER J. A survey of the Hough transform[J]. Computer Vision, Graphics, and Image Processing, 1988, 44(1): 87-116. doi: 10.1016/S0734-189X(88)80033-1 [19] XU L, OJA E, KULTANEN P. A new curve detection method: Randomized Hough transform (RHT)[J]. Pattern Recognition Letters, 1990, 11(5): 331-338. doi: 10.1016/0167-8655(90)90042-Z [20] BENTLEY J L. Multidimensional binary search trees used for associative searching[J]. Communications of the ACM, 1975, 18(9): 509-517. doi: 10.1145/361002.361007 [21] 刘哲, 周天, 彭东东, 等. 一种改进的基于PCA的ICP点云配准算法研究[J]. 黑龙江大学自然科学学报, 2019, 36(4): 473-478. doi: 10.13482/j.issn1001-7011.2019.05.006LIU Z, ZHOU T, PENG D D, et al. An improved ICP point cloud registration algorithm based on PCA[J]. Journal of Natural Science of Heilongjiang University, 2019, 36(4): 473-478(in Chinese). doi: 10.13482/j.issn1001-7011.2019.05.006 [22] 石峰源, 张春明, 姜丽辉, 等. 采用主成分分析的迭代最近点算法优化与验证[J]. 激光与光电子进展, 2022, 59(2): 9.SHI F Y, ZHANG C M, JIANG L H, et al. Optimization and verification of ICP algorithm using principal component analysis [J]. Laser and Optoelectronics Progress, 2022, 59(2): 9. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 250
- HTML全文浏览量: 55
- PDF下载量: 27
- 被引次数: 0
