



-
摘要:
扑翼机的飞行依赖于扑翼翼面的运动,经过优化的运动策略能够使特定翼面发挥最佳的气动性能。然而目前扑翼机设计中缺乏有效的运动参数优化方法,无法针对给定机翼确定一组最优运动参数。采用非定常涡格法(UVLM)计算扑翼气动力,与现有的实验数据进行对比,验证了气动力计算方法的准确性。基于DIRECT(矩形分割)全局优化算法,以最大化推进效率为特定优化目标,对扑翼运动参数进行了迭代优化。结果表明,通过该优化算法能够得到最优扑翼运动参数,有效提高特定气动性能;应用优化算法计算得到的平均推力与基准运动的平均推力相比,在数值上有1.04倍的提高。在设计过程中,降低气动力约束有利于扑翼运动优化,使给定扑翼翼面具有更大的推进效率,无气动力约束的最大推进效率与基准运动的推进效率相比提高了46.8%。
Abstract:The flight of an ornithopter depends on the motions of the flapping wing. The optimal aerodynamic characteristics of a specific flapping wing will be obtained when using an optimized motion strategy. Furthermore, it provides a design basis for the transmission mechanism of a flapping wing aircraft. However, there is currently a lack of effective method for motion optimization in design stage to determine a set of optimal motion parameters for a given wing. In this paper, the unsteady vortex lattice method (UVLM) is applied to calculate the aerodynamic effect caused by the flapping motion. To verify accuracy of the aerodynamic calculation method, the result is correctly compared with existing experiment data. Then based on the DIRECT (divide rectangle) global optimization algorithm, the flapping kinematics parameters are iteratively optimized to maximize the propulsion efficiency. The results show that the optimization method can effectively solve the optimal parameters of flapping kinematics parameters and improve specific aerodynamic performance. The average thrust calculated by the optimization algorithm in this paper has a 104% numerical improvement compared to that of the baseline motion. Besides, it indicates that reducing the lift and thrust constraints are beneficial to the optimization to achieve a higher propulsion efficiency in the design process. The maximum propulsion efficiency without aerodynamic constraints in this paper is improved by 46.8% compared to that of the baseline motion.
-

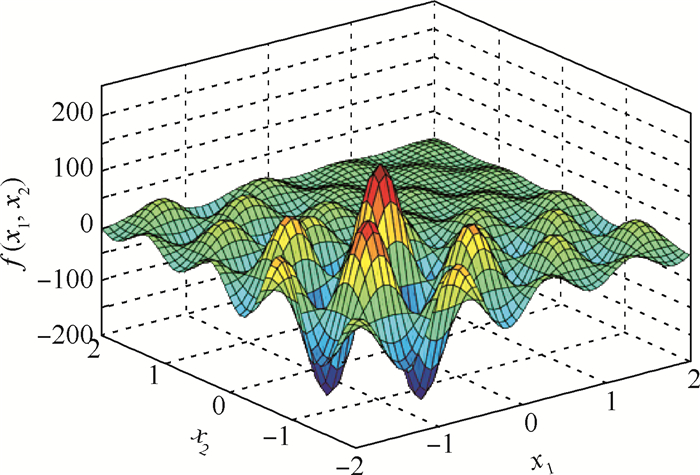
图 3 DIRECT全局优化算法在搜索域中的采样情况
Figure 3. Sampling of DIRECT global optimization algorithm in search domain

图 4 扑翼机翼上下简谐振荡的运动示意图
Figure 4. Schematic diagram of vertical-harmonic-oscillating flapping wing motion

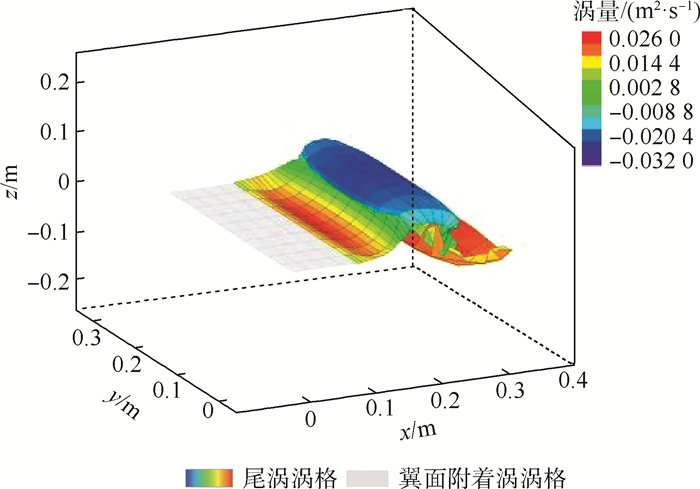
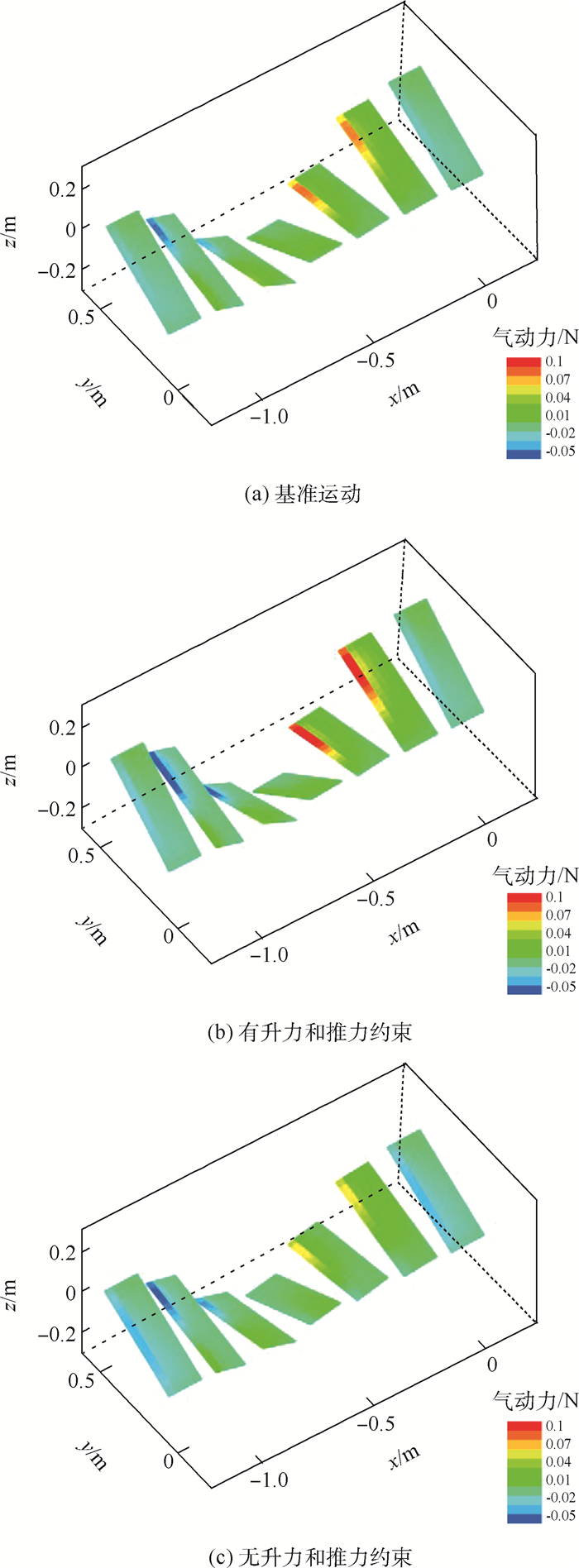
图 5 扑翼运动非定常涡格法动态网格的三维视图
Figure 5. Three-dimensional view of UVLM dynamic mesh caused by flapping motion

图 6 完整扑翼周期内的升力系数变化
Figure 6. Lift coefficient caused by flapping motion in a complete cycle

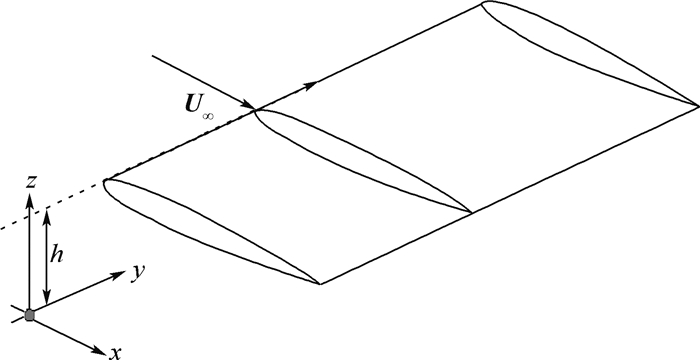
图 7 扑翼机翼绕点扑动和俯仰的耦合运动
Figure 7. Schematic diagram of coupled flapping wing motion of flapping and pitching around a point

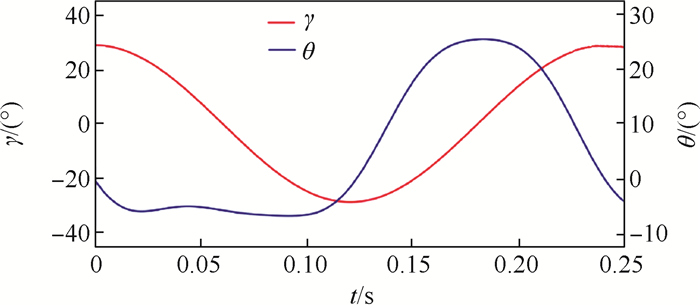
图 8 仿生扑翼运动学的俯仰角度和扑动角度
Figure 8. Pitch angle and translation distance of bionic flapping motion

图 9 三种运动参数下扑翼运动的升力系数和推力系数
Figure 9. Lift coefficient and thrust coefficient under flapping motion with three sets of parameters

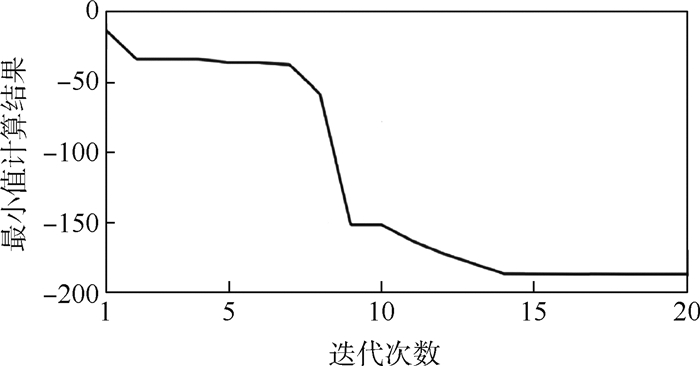
图 11 最大推进效率随优化迭代次数的变化
Figure 11. Maximum propulsion efficiency vs. number of optimization iteration
表 1 DIRECT全局优化算法的最优运动学结果
Table 1. Optimal kinematics results of DIRECT global optimization algorithm
项目 基准运动参数 有气动力约束 无气动力约束 θ0/(°) 5.46 5.28 -0.17 γm/(°) 27.86 35.73 25.32 η 0.222 0.235 0.326 D/N -0.095 -0.194 -0.111 L/N 0.414 0.414 -0.006  下载: 导出CSV
下载: 导出CSV
-
[1] KEENNON M, KLINGEBIEL K, WON H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle: AIAA 2012-0588[R]. Reston: AIAA, 2012. [2] NICK T P S, TAI Y C, HO C M, et al Microbat: A palm-sized electrically powered ornithopter[C]//Proceedings of the NASA/JPL Workshop on Biomorphic Robotics, 2001: 14-17. [3] RAZAK N A, DIMITRIADIS G. Experimental study of wings undergoing active root flapping and pitching[J]. Journal of Fluids and Structures, 2014, 49: 687-704. doi: 10.1016/j.jfluidstructs.2014.06.009 [4] SRIGRAROM S, CHAN W L. Flow field of flapping albatross-like wing and sound at low Reynolds number[J]. Journal of Unmanned System Technology, 2013, 1(2): 69-72. [5] STANFORD B K, BERAN P S. Analytical sensitivity analysis of an unsteady vortex-lattice method for flapping-wing optimization[J]. Journal of Aircraft, 2010, 47(2): 647-662. doi: 10.2514/1.46259 [6] GHOMMEM M, COLLIER N, NIEMI A H, et al. On the shape optimization of flapping wings and their performance analysis[J]. Aerospace Science and Technology, 2014, 32(1): 274-292. doi: 10.1016/j.ast.2013.10.010 [7] GHOMMEM M, HAJJ M R, MOOK D T, et al. Global optimization of actively morphing flapping wings[J]. Journal of Fluids and Structures, 2012, 33: 210-228. doi: 10.1016/j.jfluidstructs.2012.04.013 [8] GABLONSKY J M. Modifications of the DIRECT algorithm[D]. Raleigh: North Carolina State University, 2001. [9] GHOMMEM M, COLLIER N, NIEMI A H, et al. Shape optimization and performance analysis of flapping wings[C]//Proceedings of the Eighth International Conference on Engineering Computational Technology, 2012. [10] ELDREDGE J D, JONES A R. Leading-edge vortices: Mechanics and modeling[J]. Annual Review of Fluid Mechanics, 2019, 51: 75-104. doi: 10.1146/annurev-fluid-010518-040334 [11] SMITH M, WILKIN P, WILLIAMS M. The advantages of an unsteady panel method in modelling the aerodynamic forces on rigid flapping wings[J]. The Journal of Experimental Biology, 1996, 199(Pt 5): 1073-1083. [12] VEST M S, KATZ J. Unsteady aerodynamic model of flapping wings[J]. AIAA Journal, 1996, 34(7): 1435-1440. doi: 10.2514/3.13250 [13] PERSSON P O, WILLIS D J, PERAIRE J. Numerical simulation of flapping wings using a panel method and a high-order Navier-Stokes solver[J]. International Journal for Numerical Methods in Engineering, 2012, 89(10): 1296-1316. doi: 10.1002/nme.3288 [14] ROCCIA B A, PREIDIKMAN S, MASSA J C, et al. Modified unsteady vortex-lattice method to study flapping wings in hover flight[J]. AIAA Journal, 2013, 51(11): 2628-2642. doi: 10.2514/1.J052262 [15] KATZ J, PLOTKIN A. Low-speed aerodynamics[M]. Cambridge: Cambridge University Press, 2001. [16] HEATHCOTE S, WANG Z, GURSUL I. Effect of spanwise flexibility on flapping wing propulsion[J]. Journal of Fluids and Structures, 2008, 24(2): 183-199. doi: 10.1016/j.jfluidstructs.2007.08.003 [17] AONO H, CHIMAKURTHI S, CESNIK C, et al. Computational modeling of spanwise flexibility effects on flapping wing aerodynamics: AIAA 2009-1270[R]. Reston: AIAA, 2009. [18] WOLF T, KONRATH R. Avian wing geometry and kinematics of a free-flying barn owl in flapping flight[J]. Experiments in Fluids, 2015, 56(2): 1-18. [19] LANG X Y, SONG B F, YANG W Q, et al. Aerodynamic performance of owl-like airfoil undergoing bio-inspired flapping kinematics[J]. Chinese Journal of Aeronautics, 2021, 34(5): 239-252. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 315
- HTML全文浏览量: 127
- PDF下载量: 32
- 被引次数: 0
