



-
摘要:
四旋翼无人机集群可以被用来进行区域侦察,以建立对环境与兴趣目标的认知。为四旋翼无人机集群提出一种分布式协同搜索算法和动态目标包围技术,以解决在未探测区域定位和监测目标中所遇到的挑战。为降低所提算法的复杂度,通过栅格划分方法将任务区域划分为2级栅格子区域。考虑到动态目标的随机性,设计一种数字信息素来引导多无人机对任务区域进行2次搜索,并以快速搜索到目标为奖励函数,通过滚动优化决策得到最优解作为无人机的输入。然后,基于一致性协议设计一种多无人机协同跟踪与围捕协议,以获取动态目标的实时信息。数个仿真结果与室外飞行实验验证了所提算法能够使四旋翼无人机对未知区域中动态目标进行有效搜索与动态监视。
Abstract:Quadrotor swarms can be used for regional reconnaissance to establish the cognition of the environment and targets. This study offers a distributed cooperative search algorithm and a dynamic target surrounding technique for quadrotor swarm to solve the challenge of locating and monitoring targets in unexplored areas. To reduce the complexity of the search algorithm, the area is divided into two-level grid subareas by the grid division method. Considering the randomness of dynamic targets, a digital pheromone is designed to guide quadrotors to perform a second search in the mission area. Taking the fast search target as the reward function, the optimal solution is obtained through rolling optimization as the input of quadrotors. The consensus protocol is then used as the foundation for a cooperative tracking and surrounding procedure to gather real-time data on dynamic targets. Several simulation results and outdoor flight experiments verify that the proposed algorithm can effectively search and dynamically monitor dynamic targets in unknown areas.
-
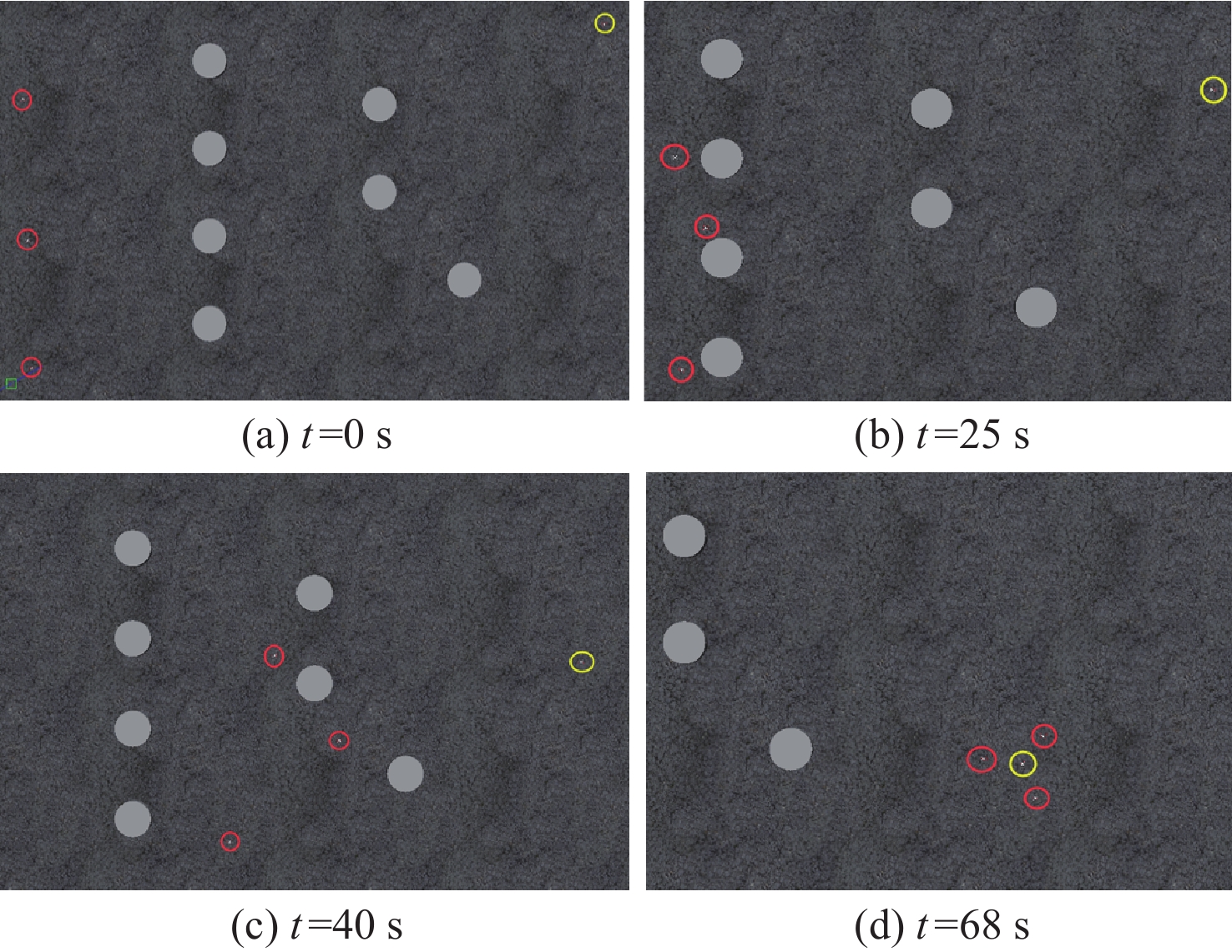
图 4 gazebo中3个侦查无人机对S型运动目标的搜索与围捕
Figure 4. Cooperative search of S-type moving target by three quadrotors in gazebo simulation
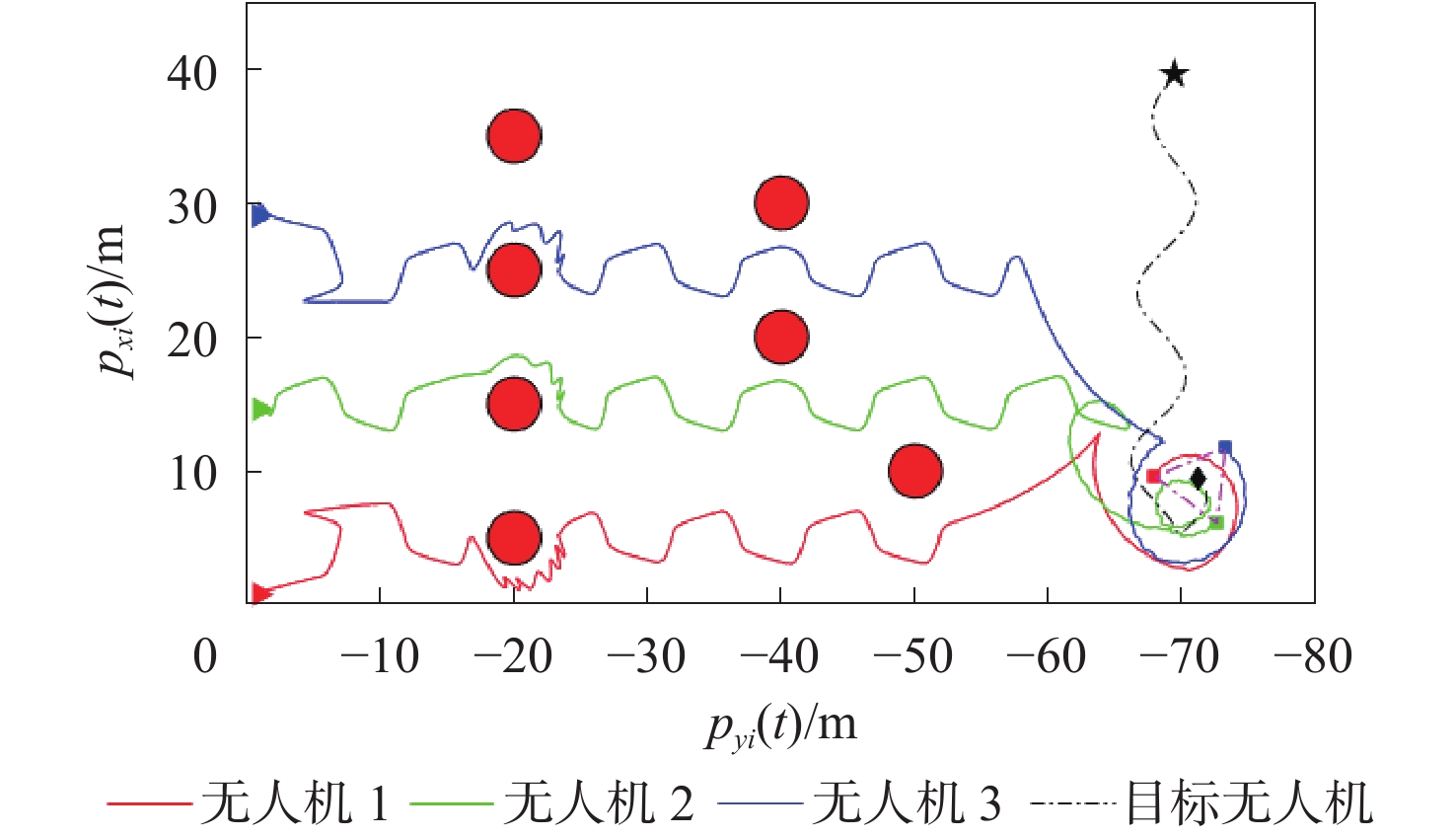
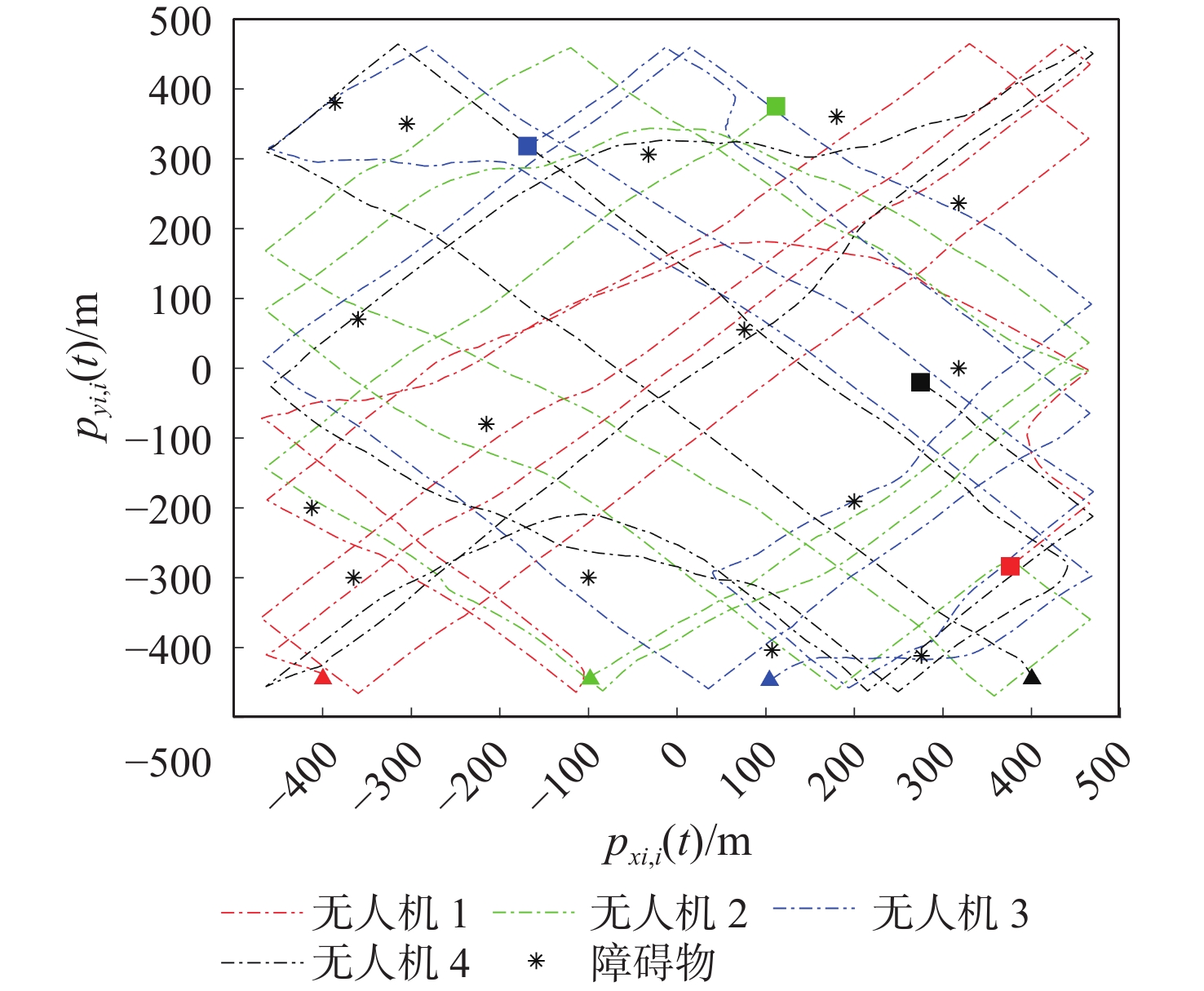
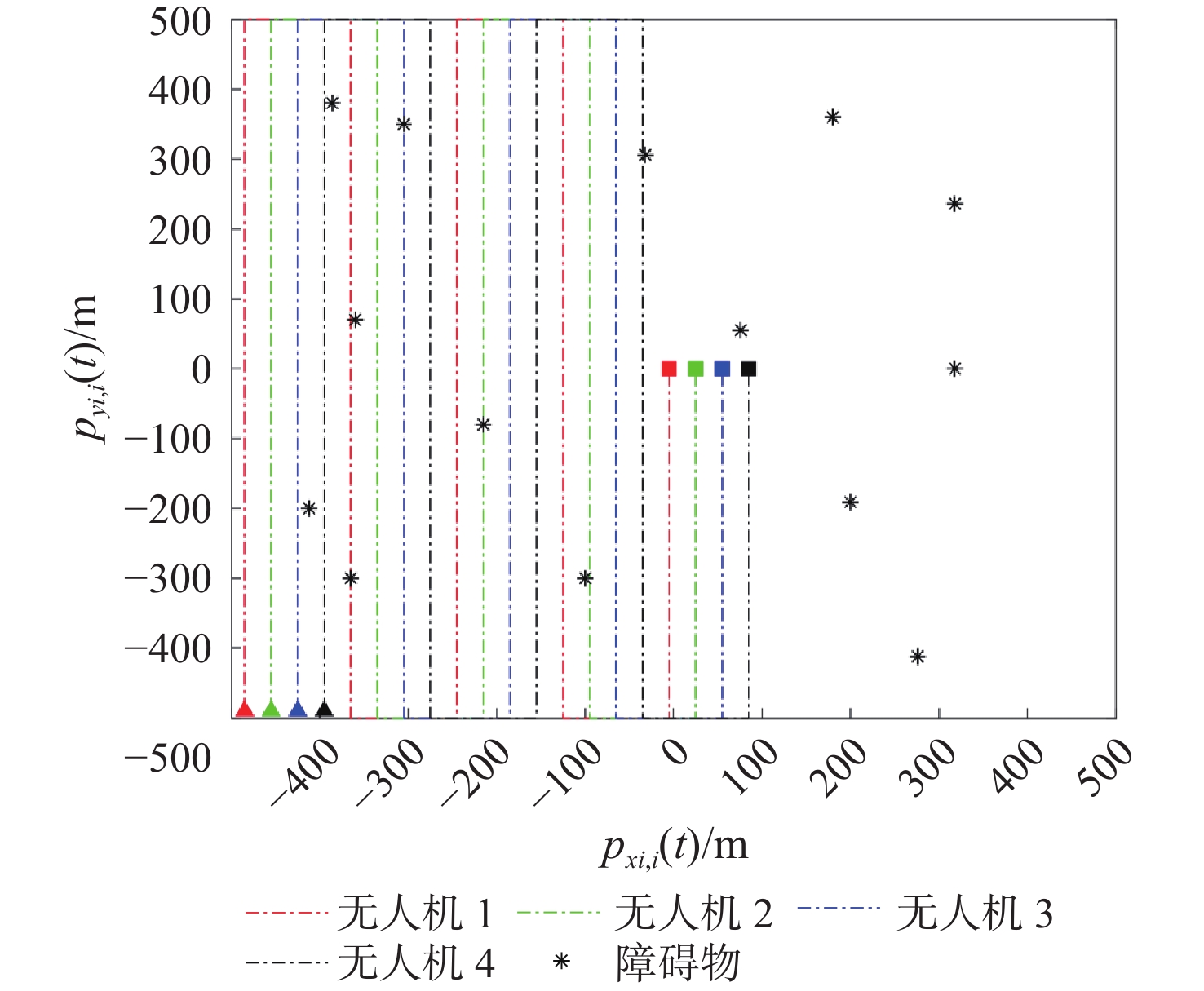
图 5 实验1中gazebo中无人机的位置轨迹
Figure 5. Trajectories of quadrotors in gazebo simulation in expetiment 1
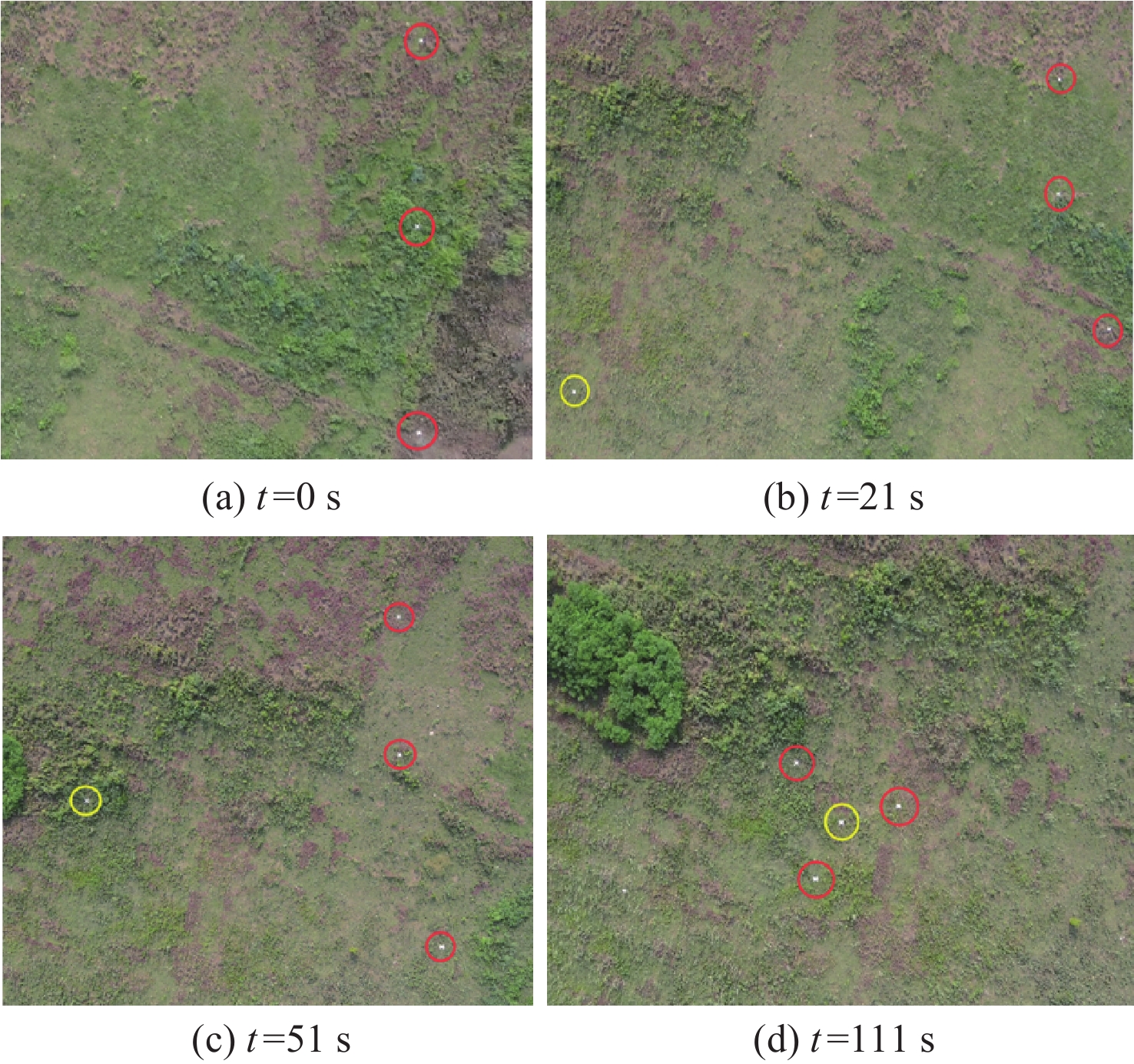
图 6 实验1中多四旋翼无人机目标搜索和围捕的图像
Figure 6. Target search and enclosure image of quadroctors in experiment 1
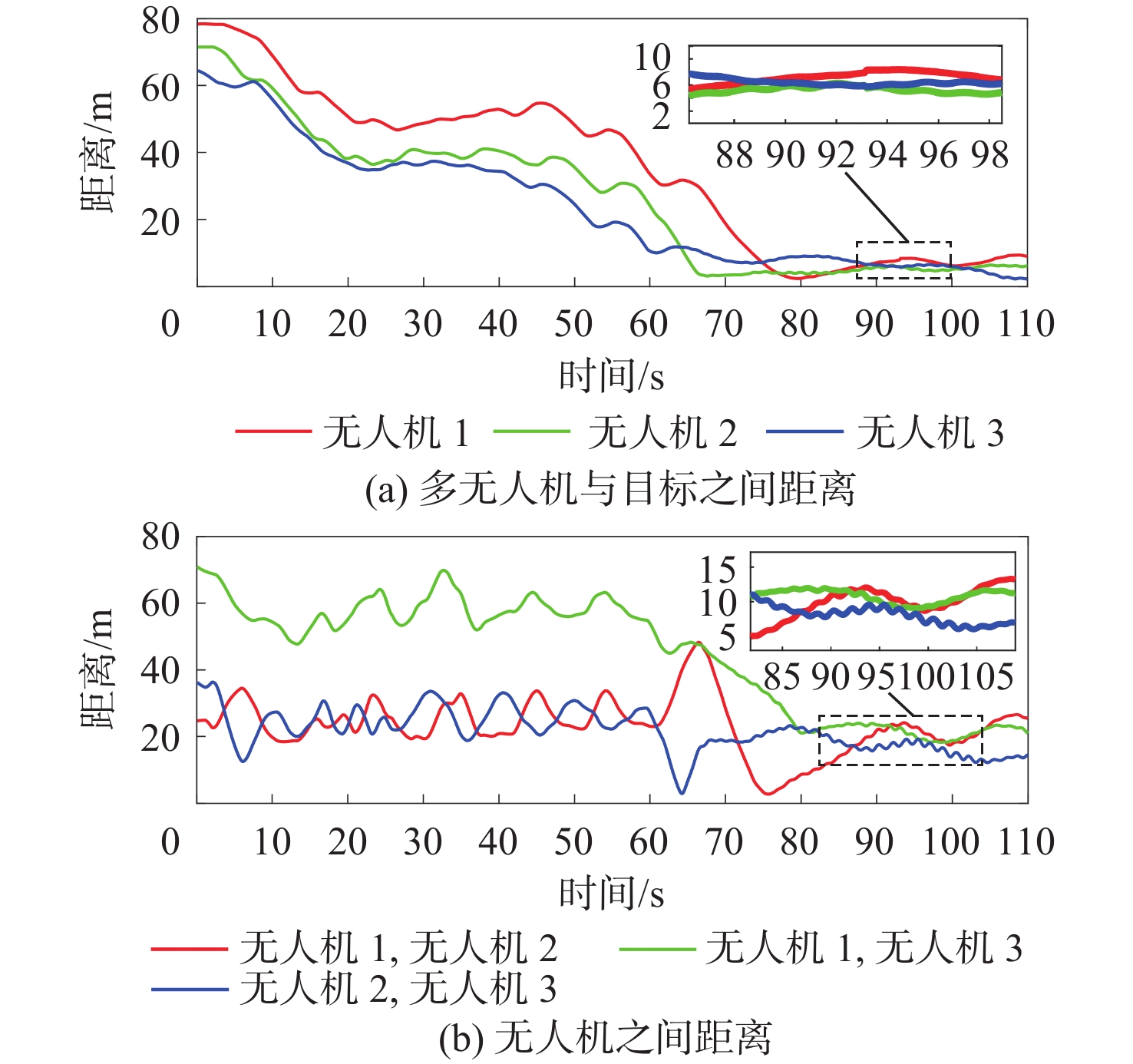
图 8 实验1中无人机与目标的距离及无人机之间距离
Figure 8. Distance between UAVs and target and distance between UAVs in experiment 1
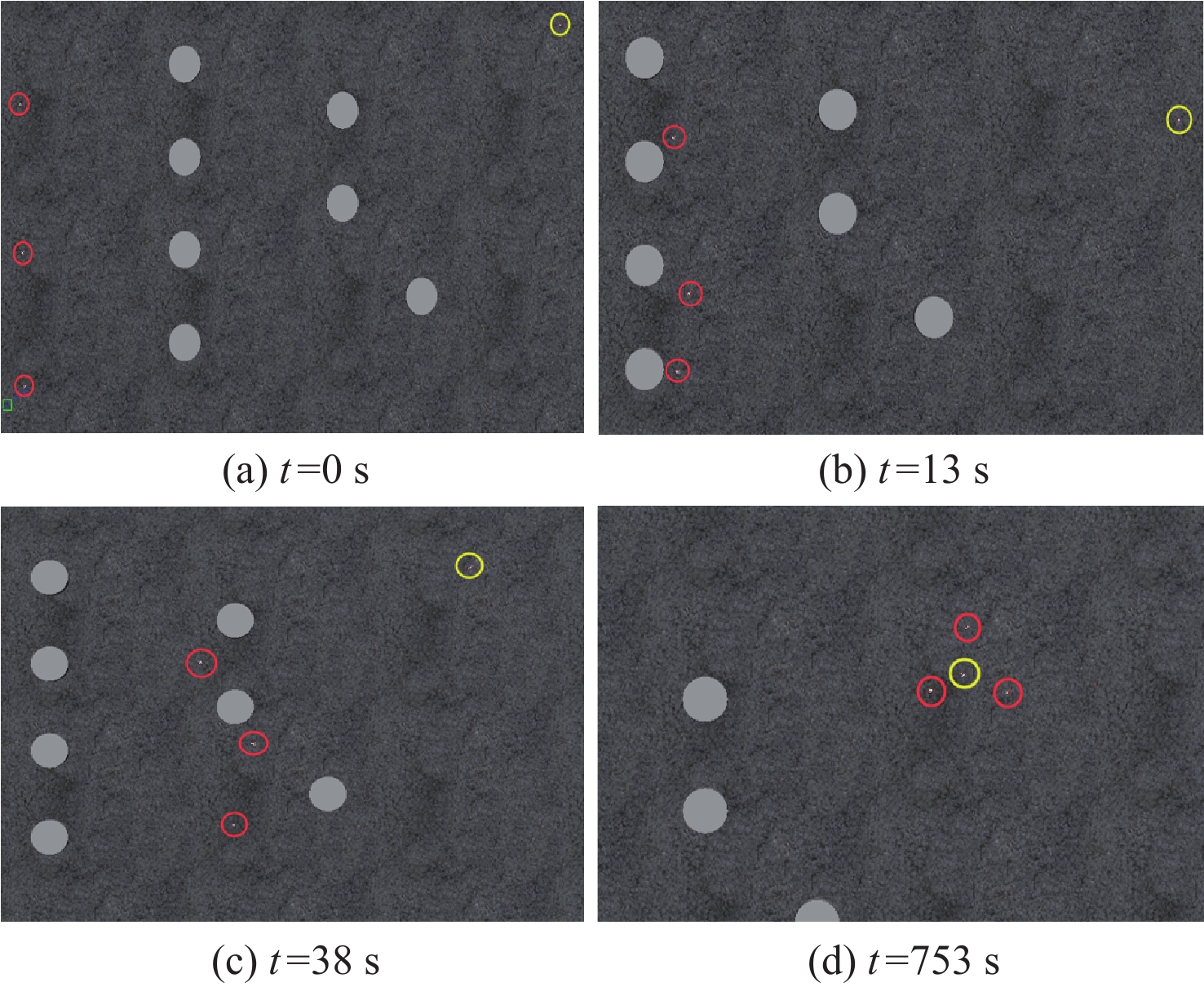
图 9 gazebo中侦察机对圆型运动目标的搜索
Figure 9. Cooperative search of circular moving target by reconnaissance quadrotors in gazebo simulation
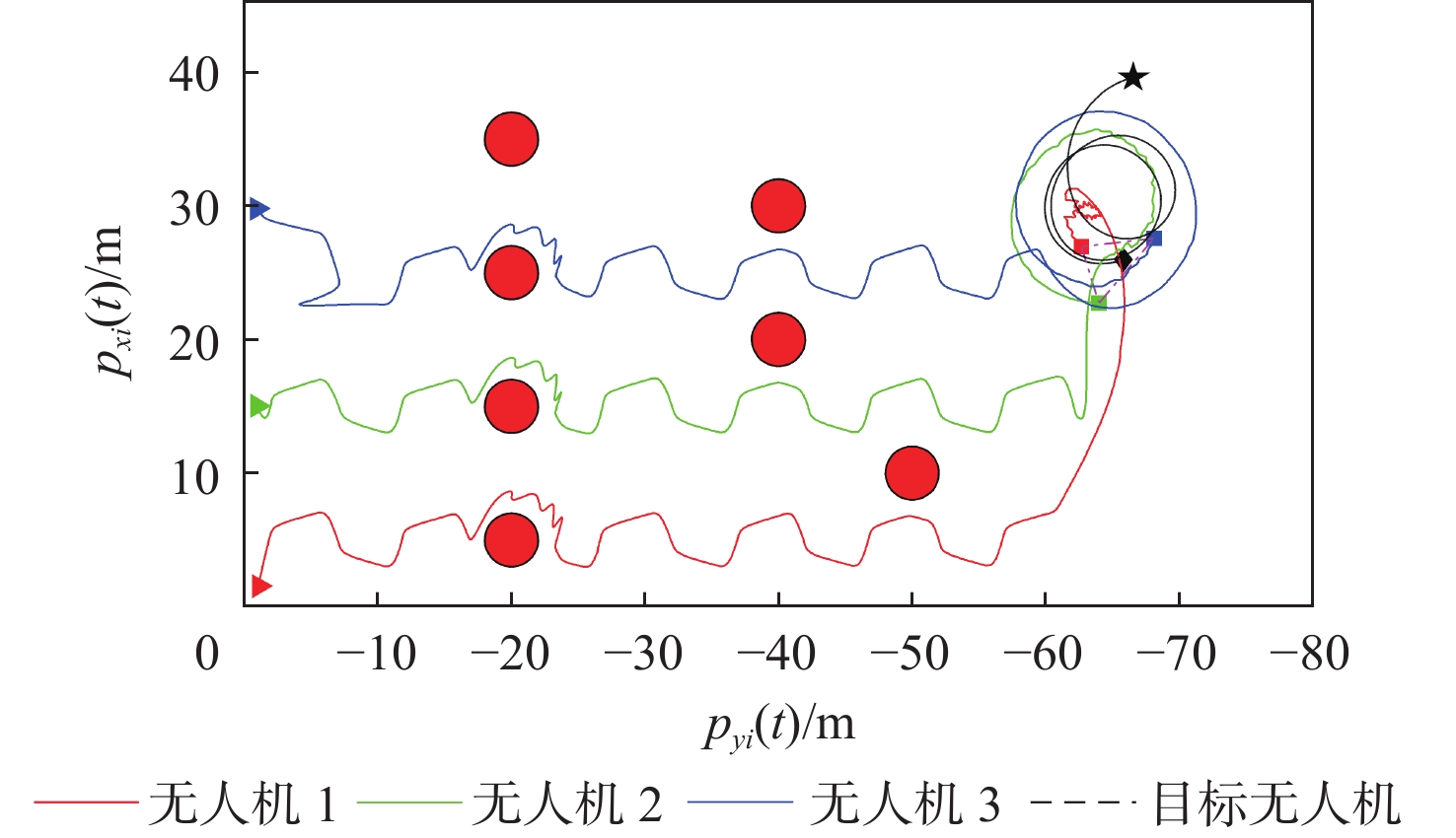
图 10 实验2中gazebo中无人机的位置轨迹
Figure 10. Trajectories of quadrotors in gazebo simulation in experiment
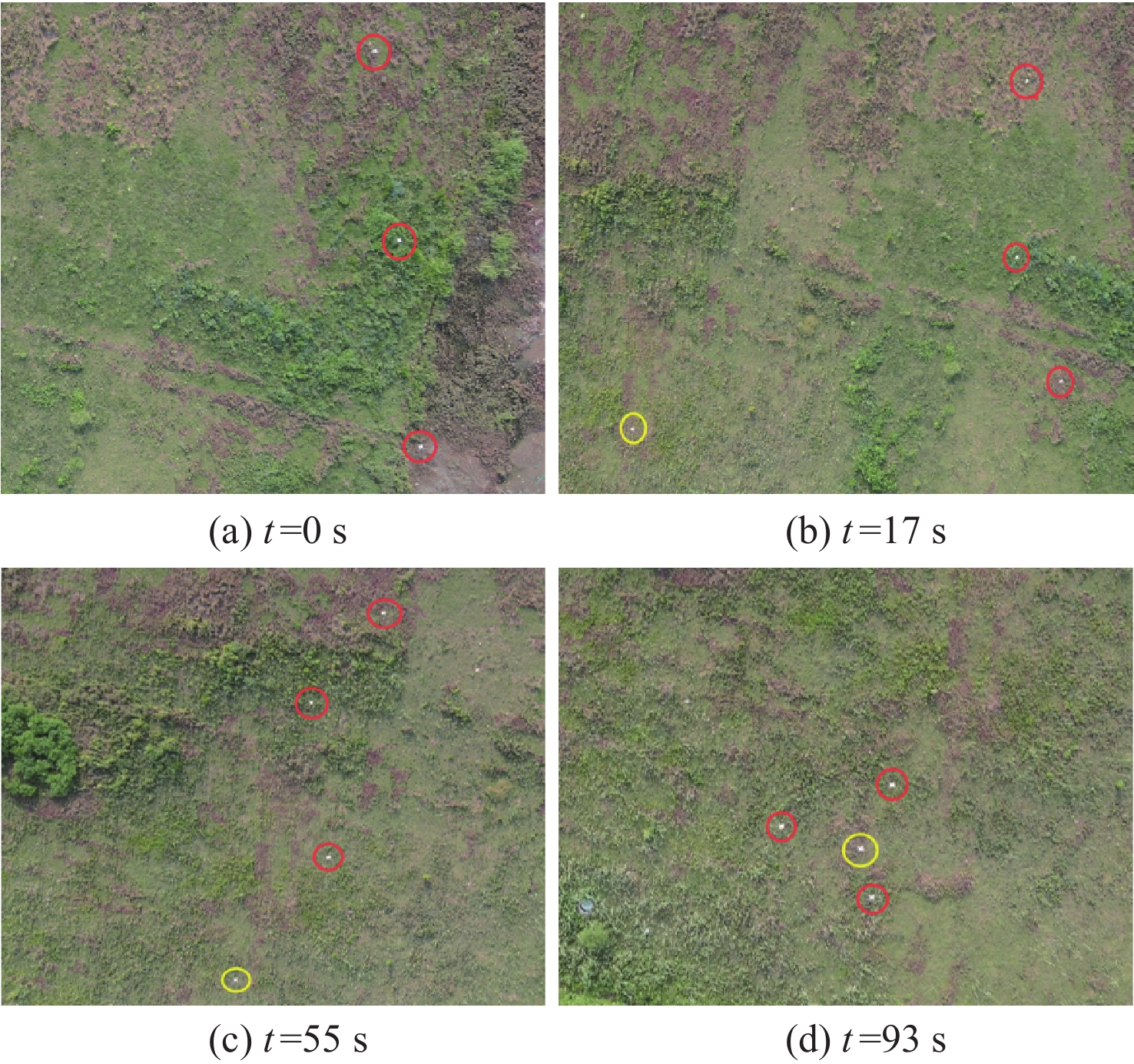
图 11 实验2中多四旋翼无人机中目标搜索和围捕的图像
Figure 11. Target search and enclosure image of quadroctors in experiment 2
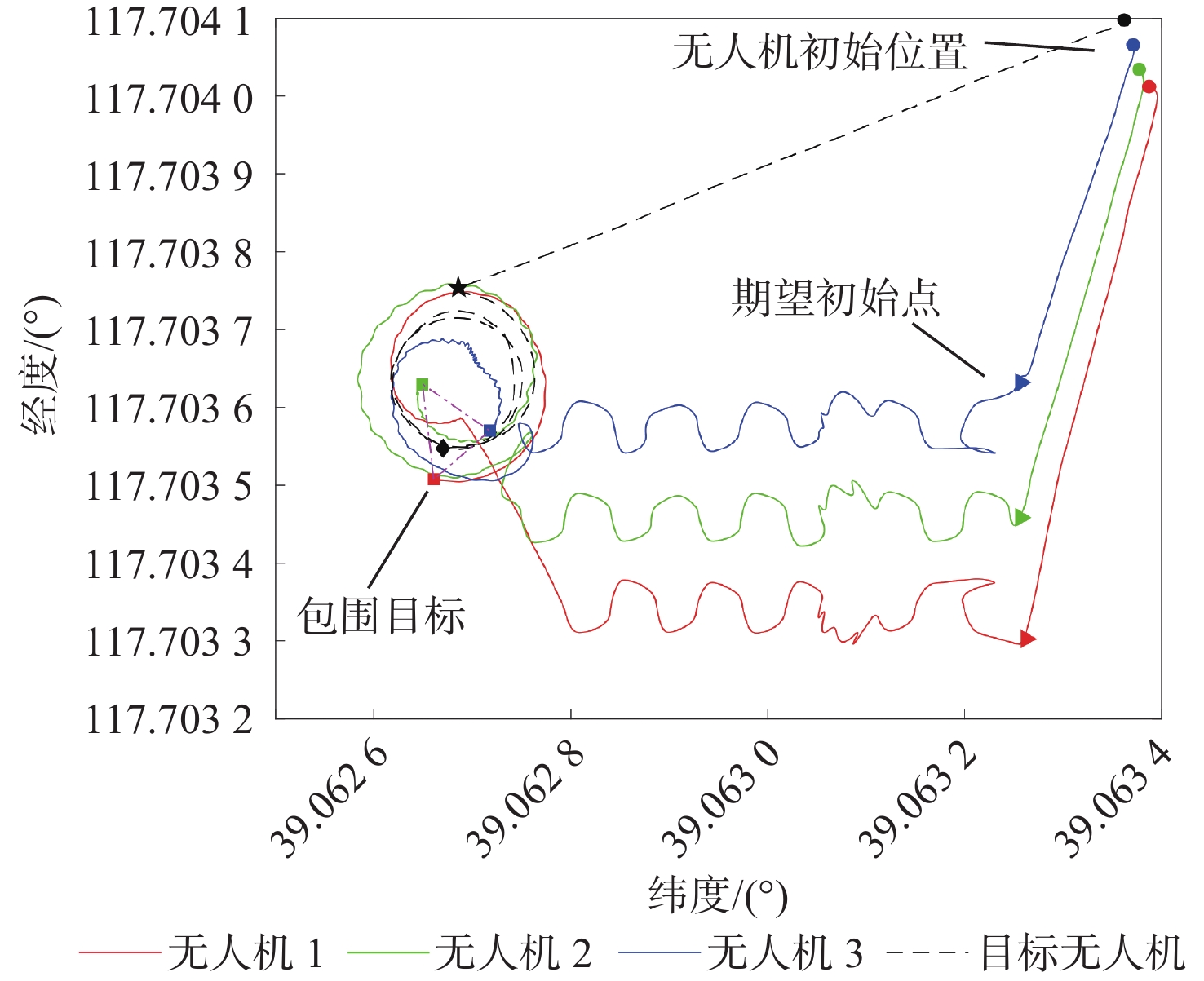
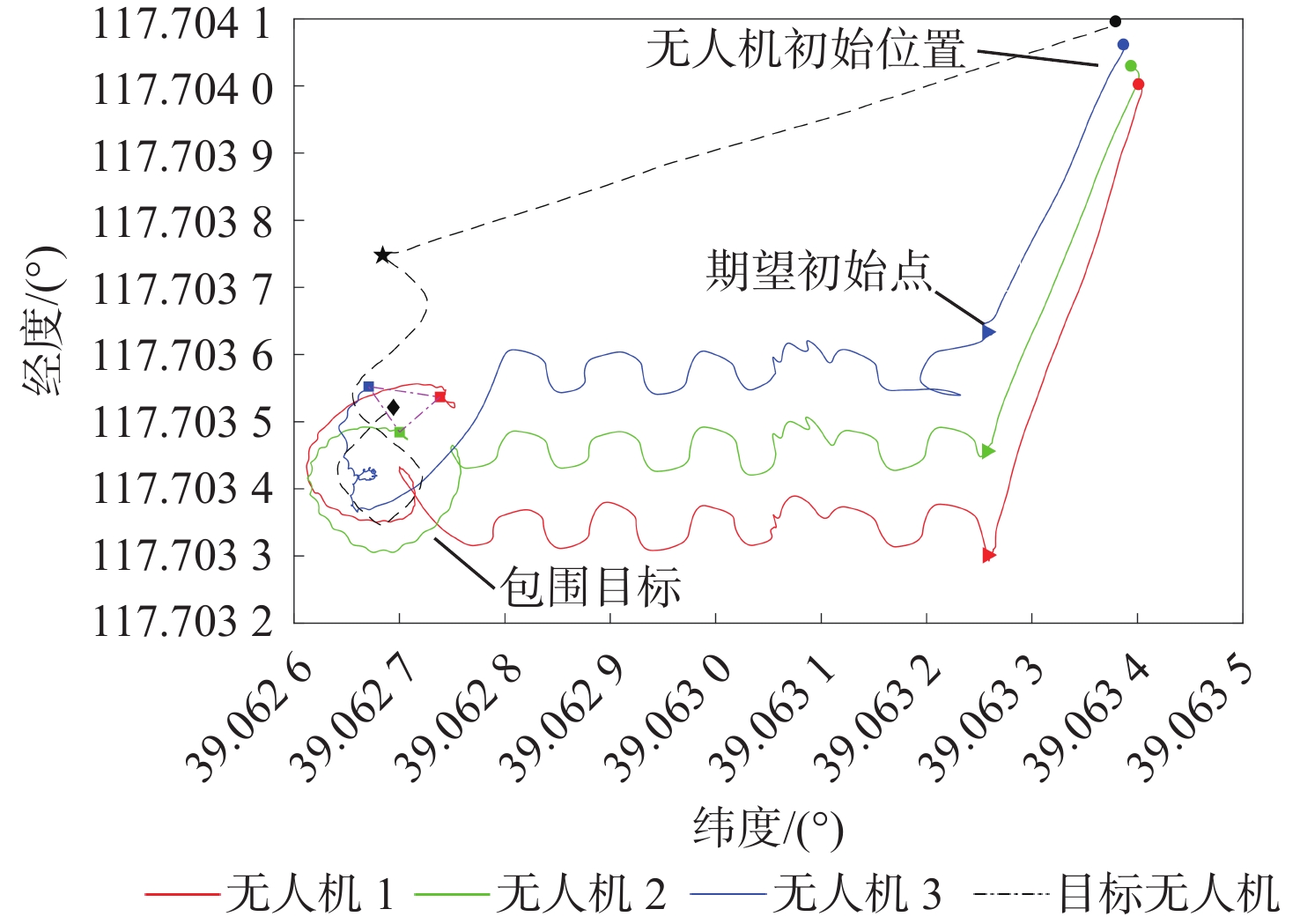
图 12 实验2中侦察机与动态目标的位置轨迹
Figure 12. Trajectories of quadrotors and target in experiment 2
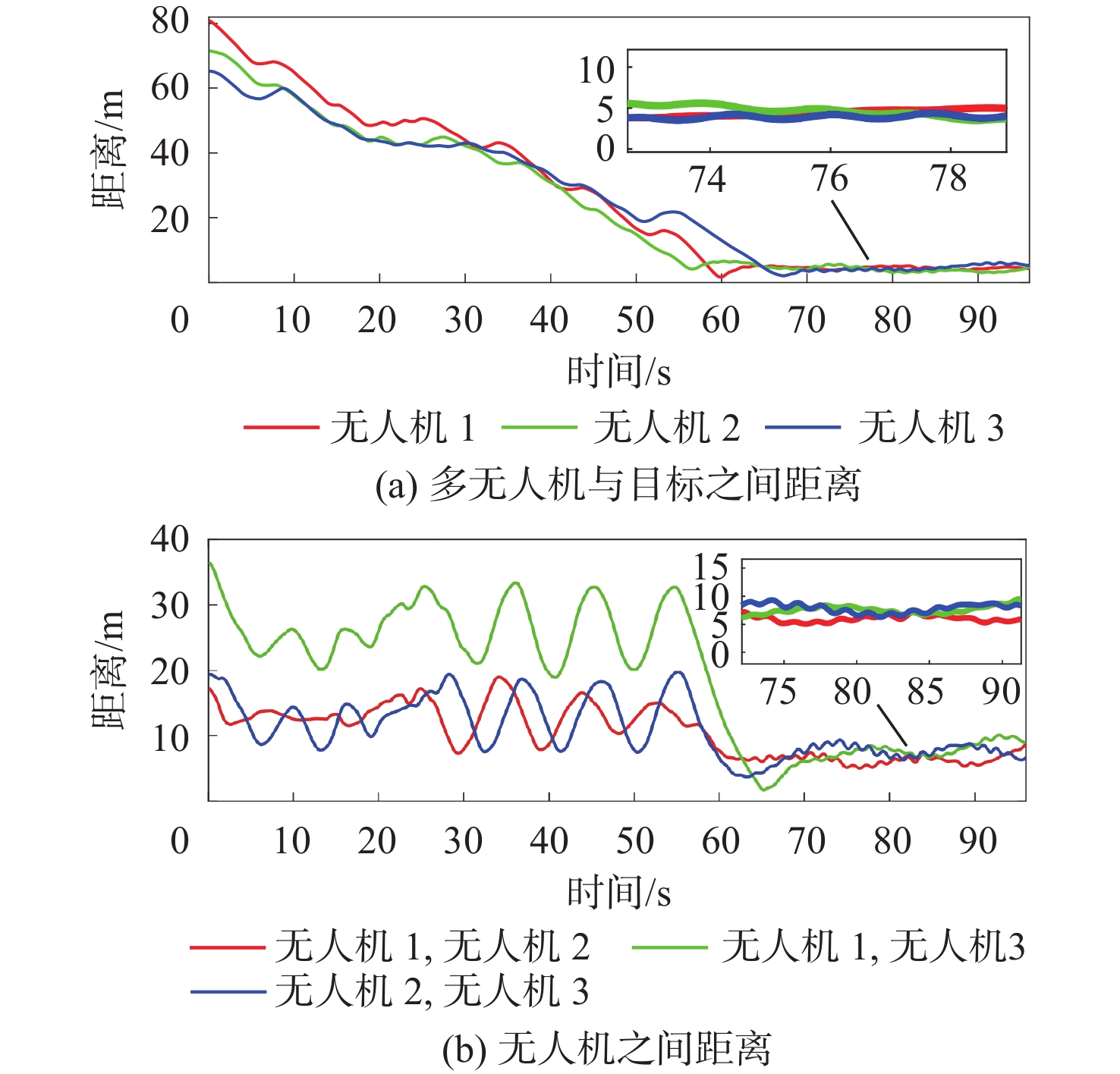
图 13 实验2中无人机与目标的距离及无人机之间距离
Figure 13. Distance between UAVs and target and distance between UAVs in experiment 2
-
[1] HAN J L, CHEN Y Q. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field[J]. Journal of Intelligent and Robotic Systems, 2014, 74(1-2): 323-332. doi: 10.1007/s10846-013-9897-4 [2] PETRLÍK M, BÁČA T, HEŘT D, et al. A robust UAV system for operations in a constrained environment[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2169-2176. doi: 10.1109/LRA.2020.2970980 [3] 吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47(4): 814-827. doi: 10.13700/j.bh.1001-5965.2020.0026WU A, YANG R N, LIANG X L, et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0026 [4] SHIN G, YOOUN H, SHIN D, et al. Incremental learning method for cyber intelligence, surveillance, and reconnaissance in closed military network using converged IT techniques[J]. Soft Computing, 2018, 22(20): 6835-6844. doi: 10.1007/s00500-018-3433-1 [5] ZOHDI T I. Multiple UAVs for mapping: A review of basic modeling, simulation, and applications[J]. Annual Review of Environment and Resources, 2018, 43: 523-543. doi: 10.1146/annurev-environ-102017-025912 [6] 曹翔, 孙长银. 栅格地图中多机器人协作搜索目标[J]. 控制理论与应用, 2018, 35(3): 273-282. doi: 10.7641/CTA.2017.70242CAO X, SUN C Y. Cooperative target search of multi-robot in grid map[J]. Control Theory & Applications, 2018, 35(3): 273-282(in Chinese). doi: 10.7641/CTA.2017.70242 [7] ALFEO A, CIMINO M, VAGLINI G. Enhancing biologically inspired swarm behavior: Metaheuristics to foster the optimization of UAVs coordination in target search[J]. Computers & Operations Research, 2019, 110: 34-47. [8] GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers & Electrical Engineering, 2019, 75: 189-201. [9] TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451. doi: 10.1016/j.eswa.2016.02.007 [10] KHAN A, YANMAZ E, RINNER B. Information exchange and decision making in micro aerial vehicle networks for cooperative search[J]. IEEE Transactions on Control of Network Systems, 2015, 2(4): 335-347. doi: 10.1109/TCNS.2015.2426771 [11] AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270-299. doi: 10.1016/j.comcom.2019.10.014 [12] SUN X X, CAI C, PAN S, et al. A cooperative target search method based on intelligent water drops algorithm[J]. Computers & Electrical Engineering, 2019, 80: 106494. [13] ZHEN Z Y, XING D J, GAO C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science and Technology, 2018, 76: 402-411. doi: 10.1016/j.ast.2018.01.035 [14] ZHEN Z Y, ZHU P, XUE Y X, et al. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2706-2716. doi: 10.1016/j.cja.2019.05.012 [15] LI L, ZHANG X, YUE W, et al. Cooperative search for dynamic targets by multiple UAVs with communication data losses[J]. ISA Transactions, 2021, 114: 230-241. doi: 10.1016/j.isatra.2020.12.055 [16] OH H, RAMEZAN SHIRAZI A, SUN C L, et al. Bio-inspired self-organising multi-robot pattern formation: A review[J]. Robotics and Autonomous Systems, 2017, 91: 83-100. doi: 10.1016/j.robot.2016.12.006 [17] PETRÁČEK P, WALTER V, BÁČA T, et al. Bio-inspired compact swarms of unmanned aerial vehicles without communication and external localization[J]. Bioinspiration & Biomimetics, 2021, 16(2): 026009. [18] LUO D L, SHAO J A, XU Y, et al. Coevolution pigeon-inspired optimization with cooperation-competition mechanism for multi-UAV cooperative region search[J]. Applied Sciences, 2019, 9(5): 827. doi: 10.3390/app9050827 [19] KURDI H, AL MEGREN S, YOUCEF TOUMI K, et al. Bee-inspired task allocation algorithm for multi-UAV search and rescue missions[J]. International Journal of Bio-Inspired Computation, 2020, 16(4): 252-263. doi: 10.1504/IJBIC.2020.112339 [20] VAN PARUNAK H, PURCELL M, O'CONNELL R. Digital pheromones for autonomous coordination of swarming UAV's[C]//Proceedings of the 1st UAV Conference. Reston: AIAA, 2002: 1-9. [21] DONG X W, ZHOU Y, REN Z, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024. doi: 10.1109/TIE.2016.2593656 [22] XIA Y Q, NA X T, SUN Z Q, et al. Formation control and collision avoidance for multi-agent systems based on position estimation[J]. ISA Transactions, 2016, 61: 287-296. doi: 10.1016/j.isatra.2015.12.010 [23] TIAN B L, LIU L H, LU H C, et al. Multivariable finite time attitude control for quadrotor UAV: Theory and experimentation[J]. IEEE Transactions on Industrial Electronics, 2018, 65(3): 2567-2577. doi: 10.1109/TIE.2017.2739700 [24] DU H B, ZHU W W, WEN G H, et al. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 342-353. doi: 10.1109/TCYB.2017.2777463 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1060
- HTML全文浏览量: 141
- PDF下载量: 173
- 被引次数: 0
