



-
摘要:
在城市大型停车场的智慧建设研究中,目前主要集中于硬件的升级改造及简单的人机交互,存在数字模拟与物理对象脱节、大数据利用率低的问题。为此,提出依托数字孪生技术对停车场的全要素进行数字仿真和物理映射,搭建4层数字孪生停车场基本体系架构,包括停车场全要素物理实体、停车场信息物理融合、停车场数字孪生模型、停车场应用智能服务平台,通过实时的信息传输,实现物理空间、物理对象与数字模型、虚拟对象之间的虚实映射;通过数字孪生域的不断仿真迭代,实现对物理域的实时决策和仿真预测,为用户及管理员提供泊位分配、泊车诱导、风险评估等服务。在所搭建架构内,分析了停车场全要素孪生数字精准建模、短时泊位预测、泊位分配与交替停车、泊车诱导这4大关键技术的重要性及设计要求,并通过ThingJS、MATLAB等工具对地下停车场三维空间结构进行建模及对场内泊车诱导路径规划的仿真和可视化,初步验证了构建数字孪生停车场的可行性。
Abstract:In the research on the construction of large and medium-sized parking lots in cities, the current focus is mainly on hardware upgrades and simple human-computer interactions. However, neither the low use of big data nor the divergence between digital simulation and actual things has been resolved. Based on digital twin technology, a general idea of digital simulation and physical mapping for factors of the parking lot was advanced to established a 4-layer theoretical architecture for a digital twin parking lot. It includes the all elements physical entity of the parking lot, physical integration of the parking lot’s information, digital twin model of the parking lot, and intelligent service platform of the parking lot’s application. Real-time mapping between physical objects in physical space and virtual objects in virtual space is realized through real-time information transmission; real-time decision-making and simulation predictions in the physical domain is realized through continuous simulation iteration in the digital twin domain, providing services for users and administrators, such as parking allocation, parking guidance, and risk assessment. According to this framework, 4 key points were analyzed, including the precision modeling of all elements in the parking lot, short-time parking prediction, parking space allocation and alternate parking, and parking guidance. The feasibility of constructing a digital twin parking lot is preliminarily verified by the three-dimensional spatial structure modeling of an underground parking lot, and simulation and visualization of the parking guidance path planning using tools such as ThingJS and MATLAB.
-
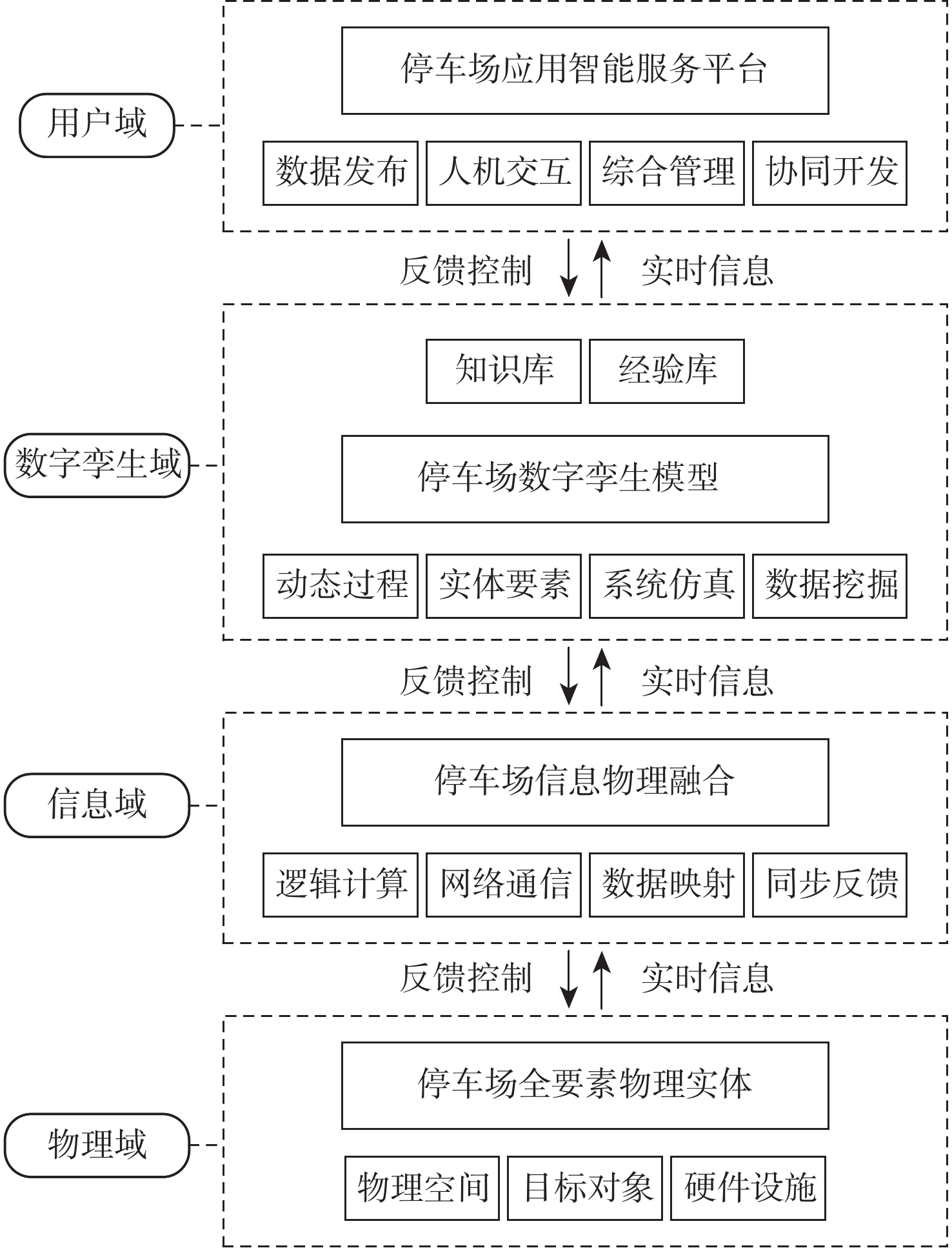
图 2 基于数字孪生的停车场整体架构
Figure 2. Overall architecture of parking lot based on digital twin technology
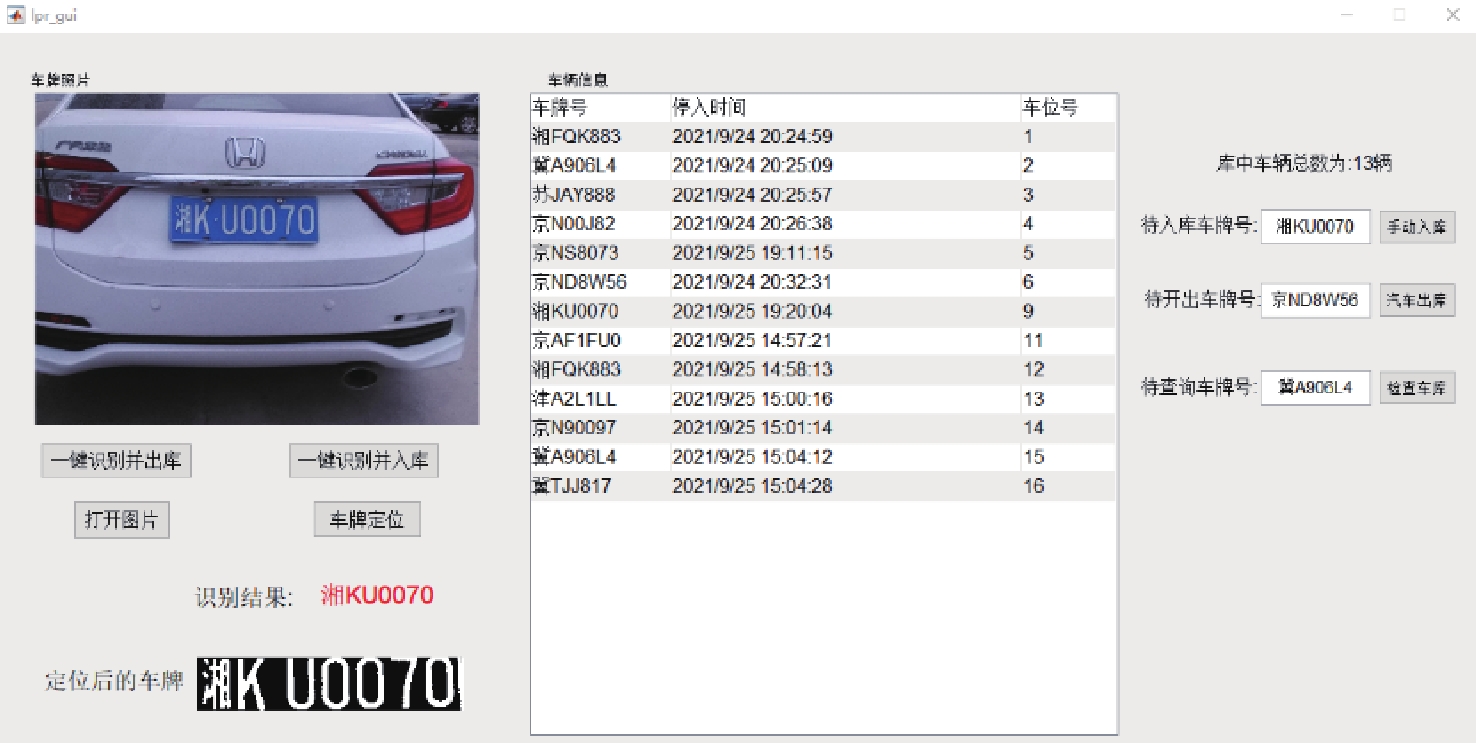
图 3 车辆出入库管理系统仿真界面
Figure 3. Simulation interface of vehicle entry and exit management system
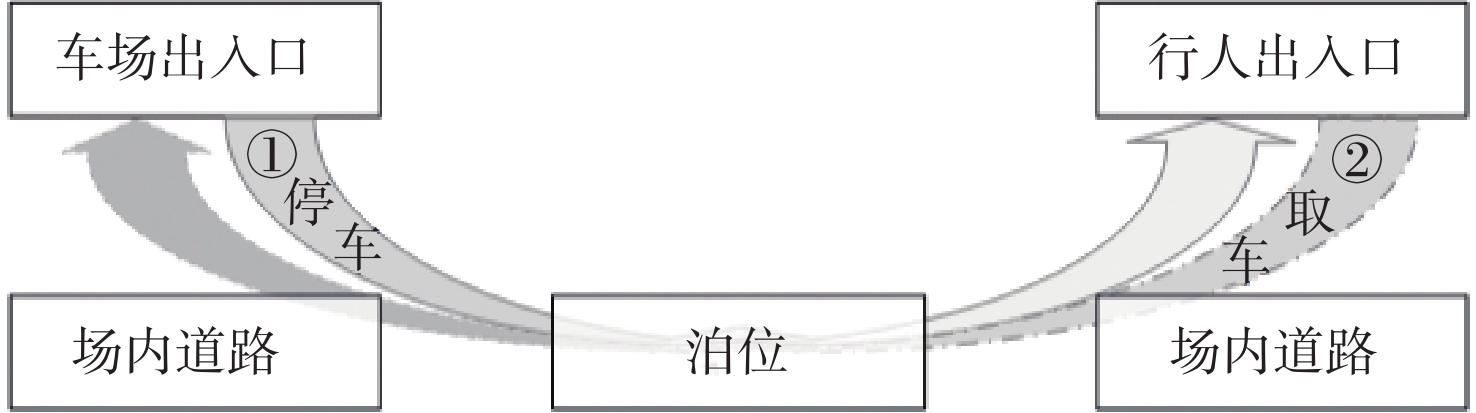
图 4 用户停车及取车行为轨迹示意图
Figure 4. Trajectory diagram of parking and pickup behaviors of users
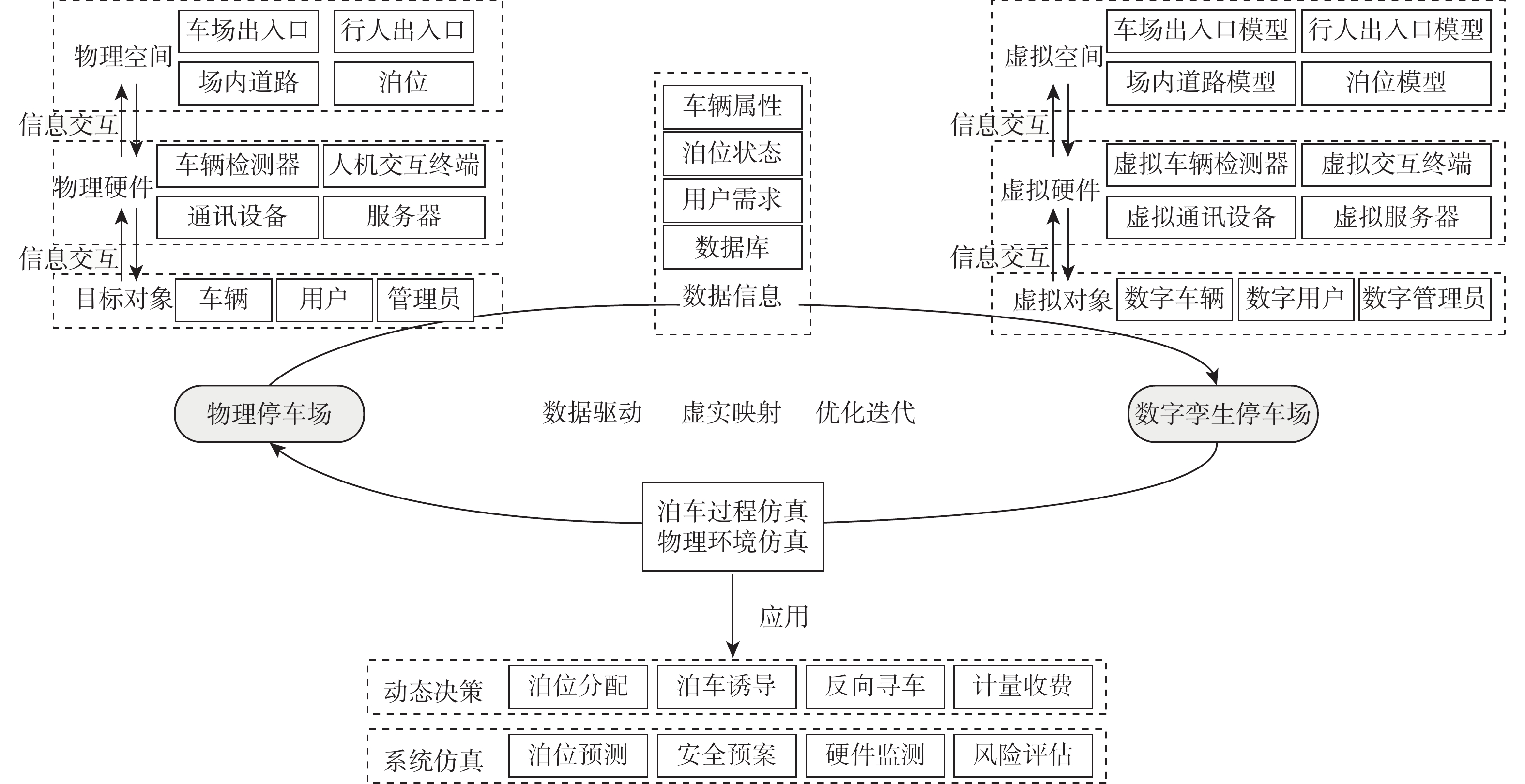
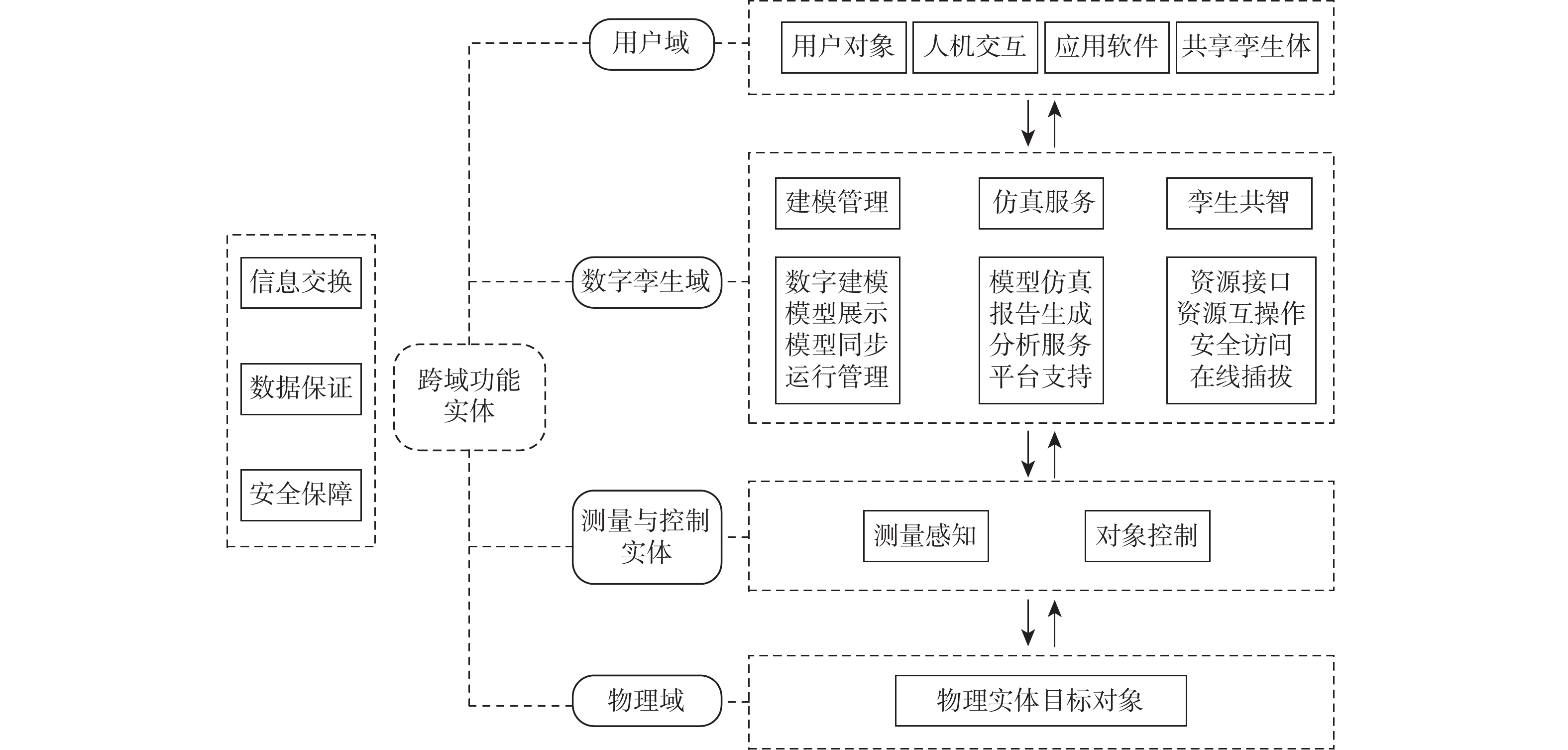
图 5 数字孪生停车场的应用功能及与物理域的交互模式
Figure 5. Application function of digital twin parking lot and interaction mode with physical domain
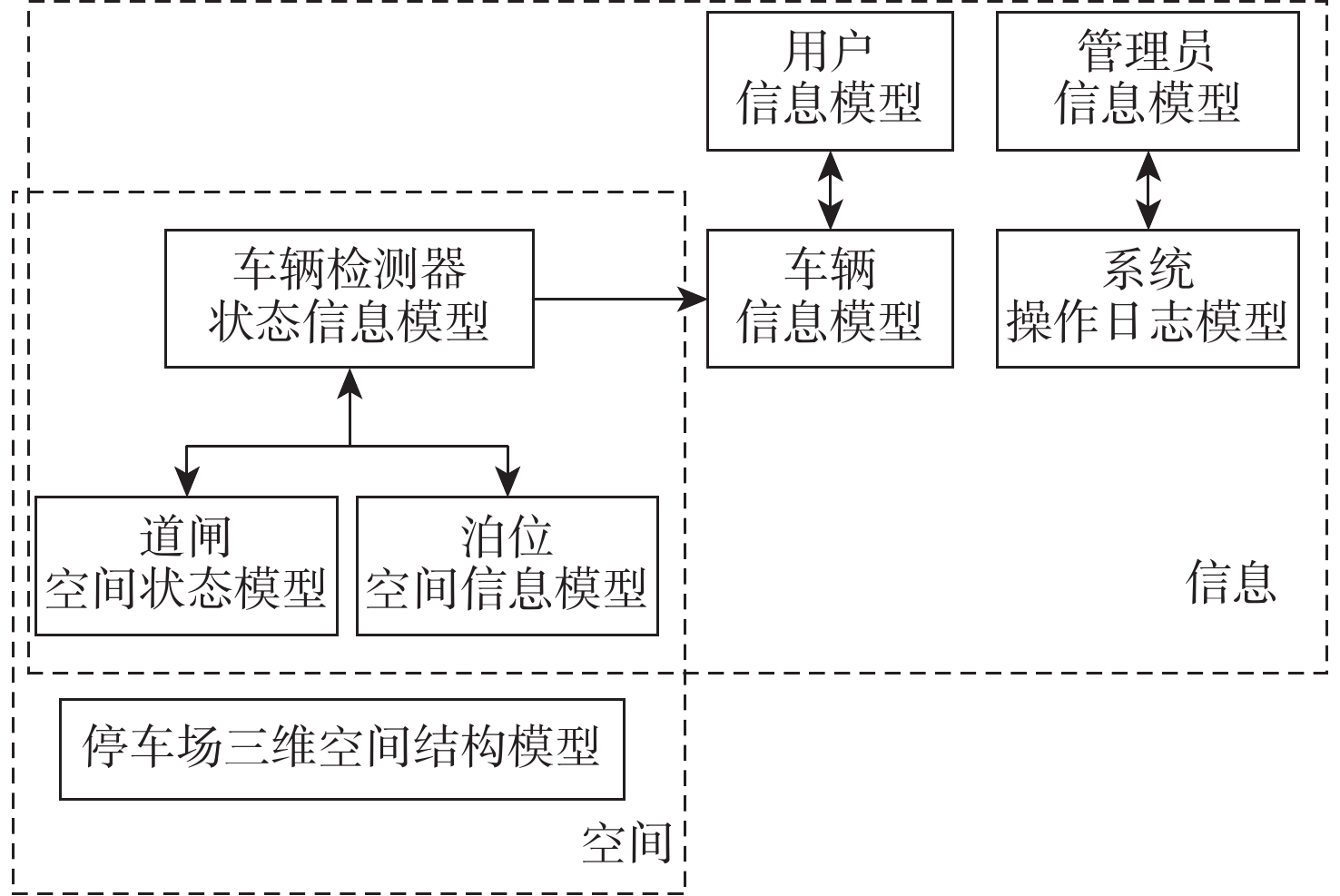
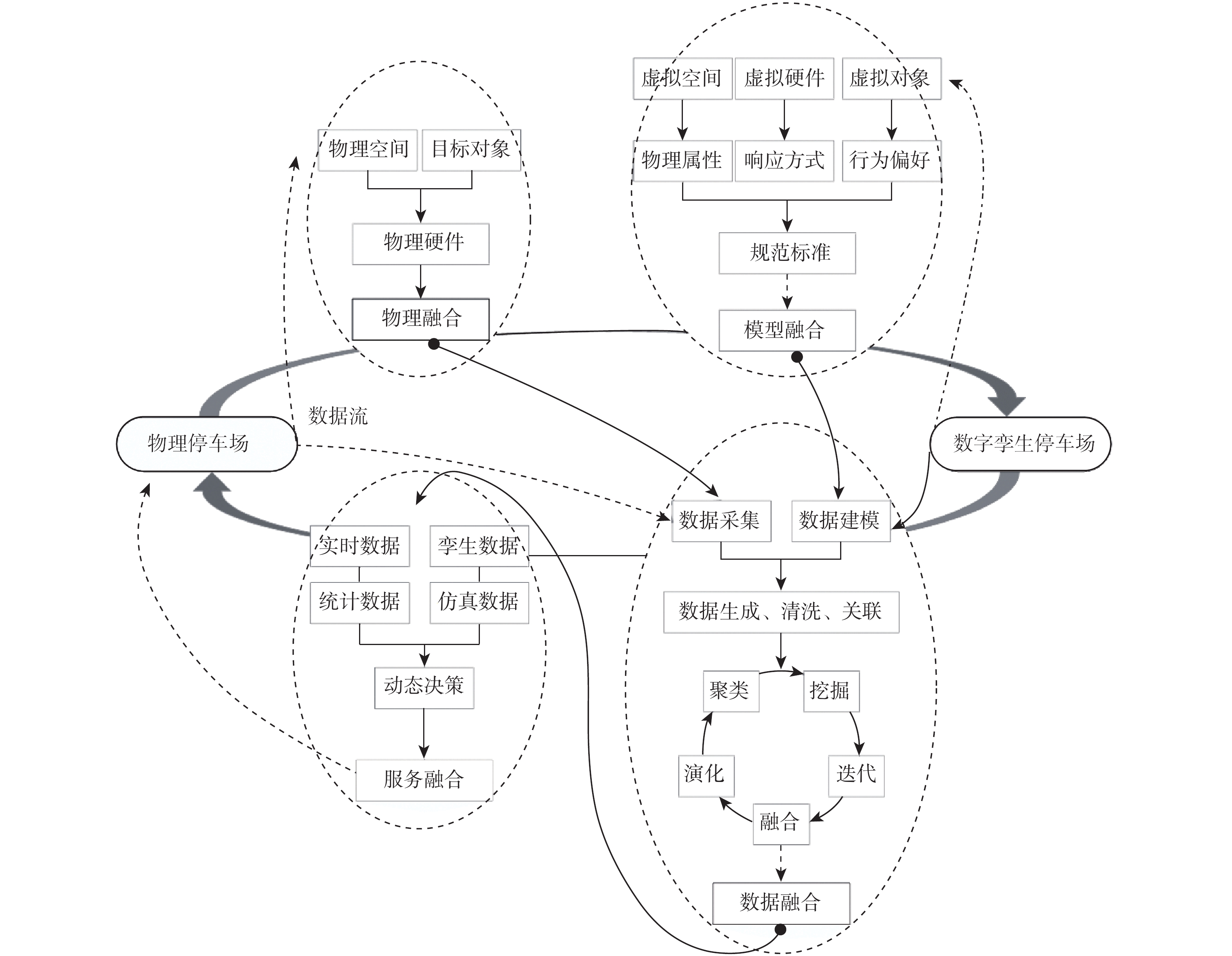
图 6 停车场数字孪生模型总体架构中各模型之间的关系
Figure 6. Relationships among components of overall architecture in parking lot digital twin model
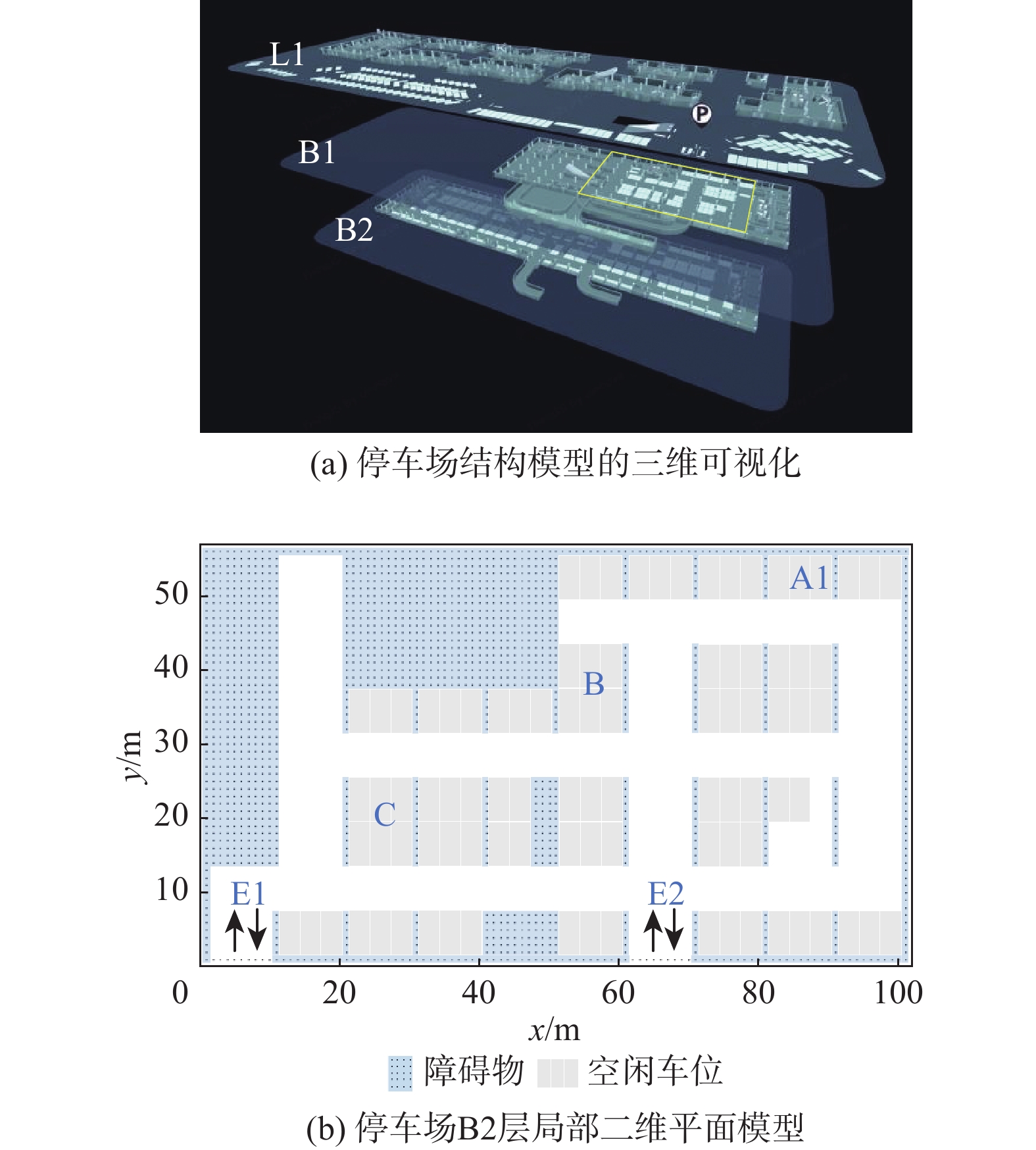
图 7 地下停车场三维空间结构建模
Figure 7. Three-dimensional spatial structure modeling of an underground parking lot
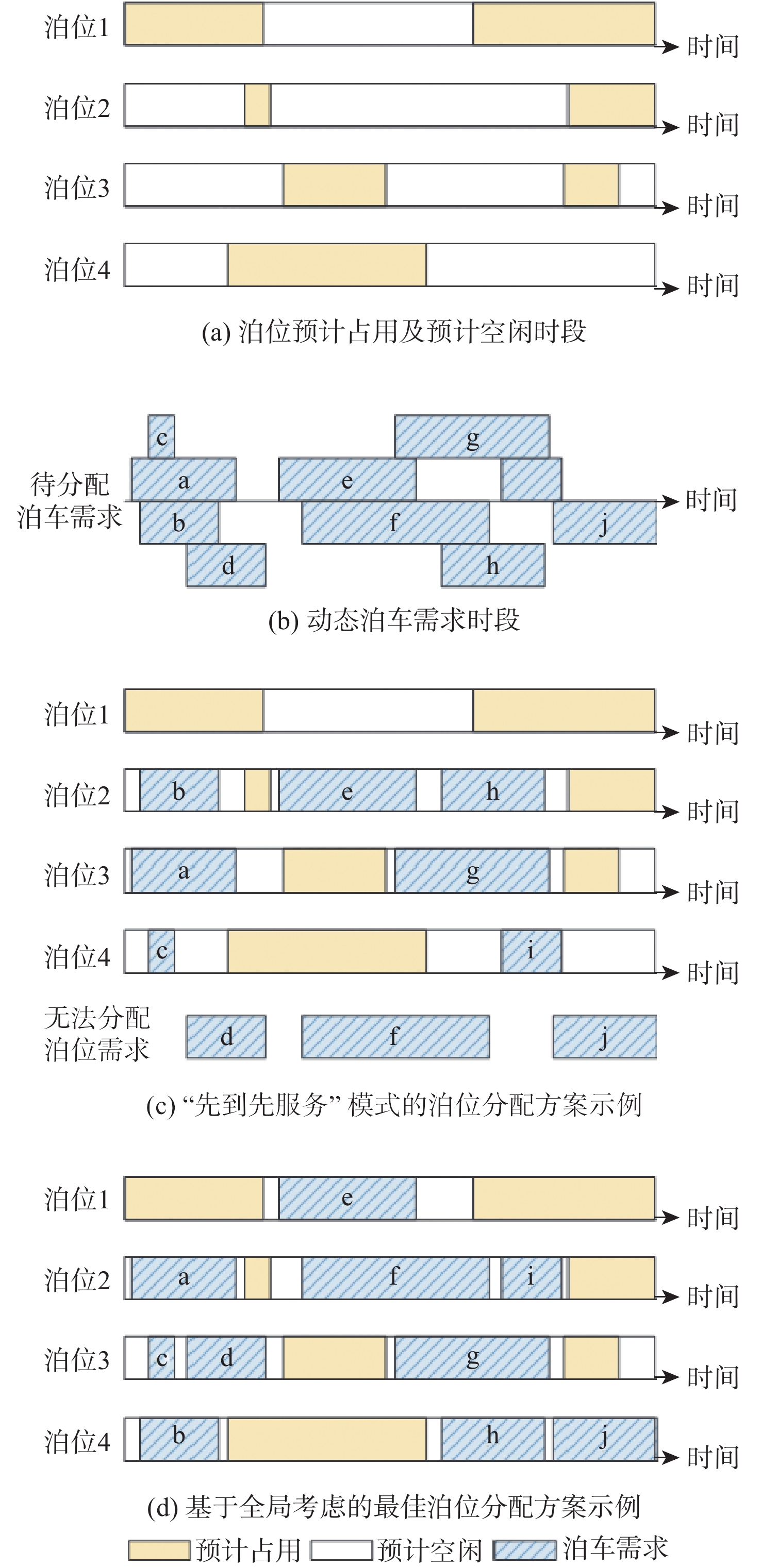
图 9 交替停车泊位时间分配示意图
Figure 9. Schematic diagram of parking time allocation for alternate parking
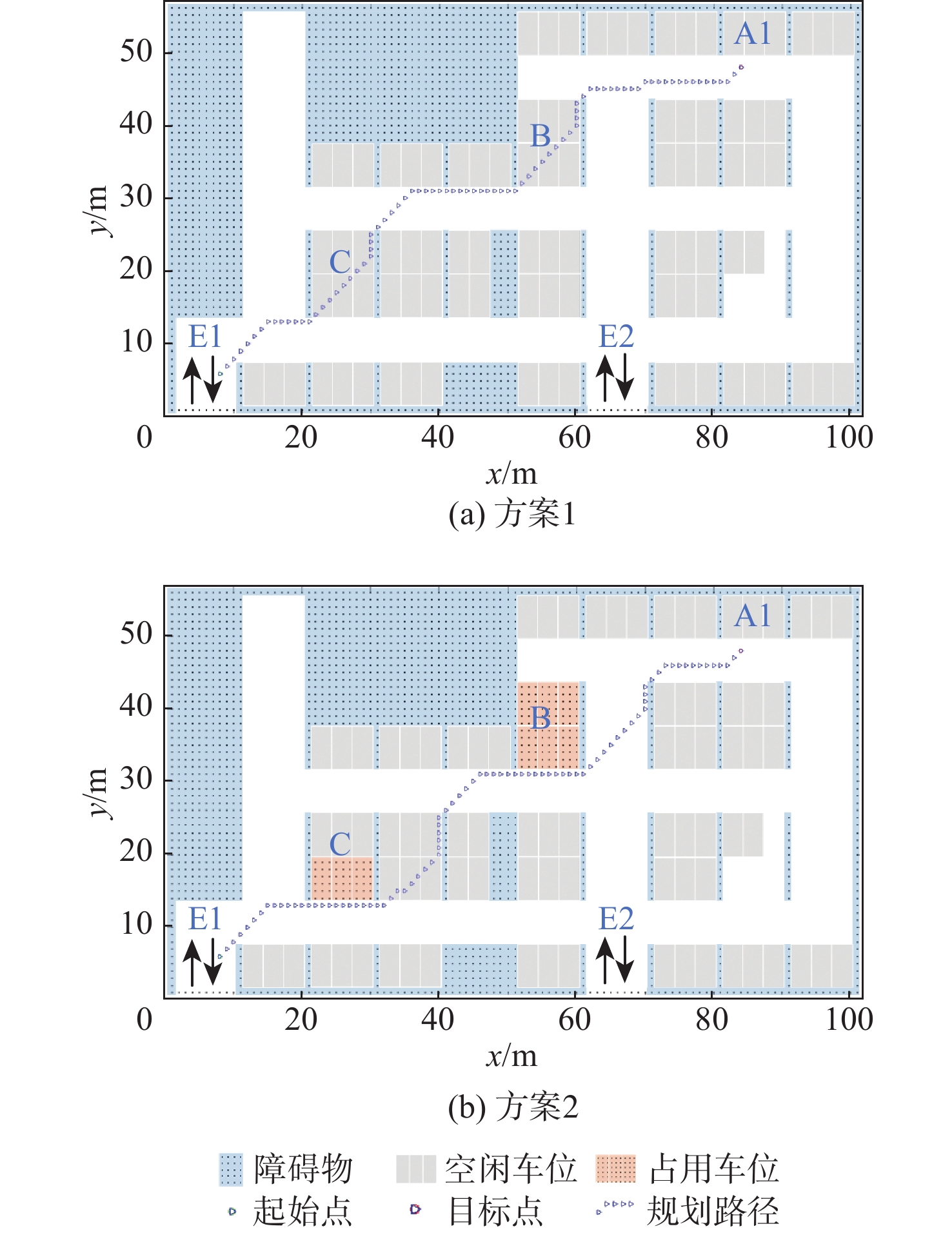
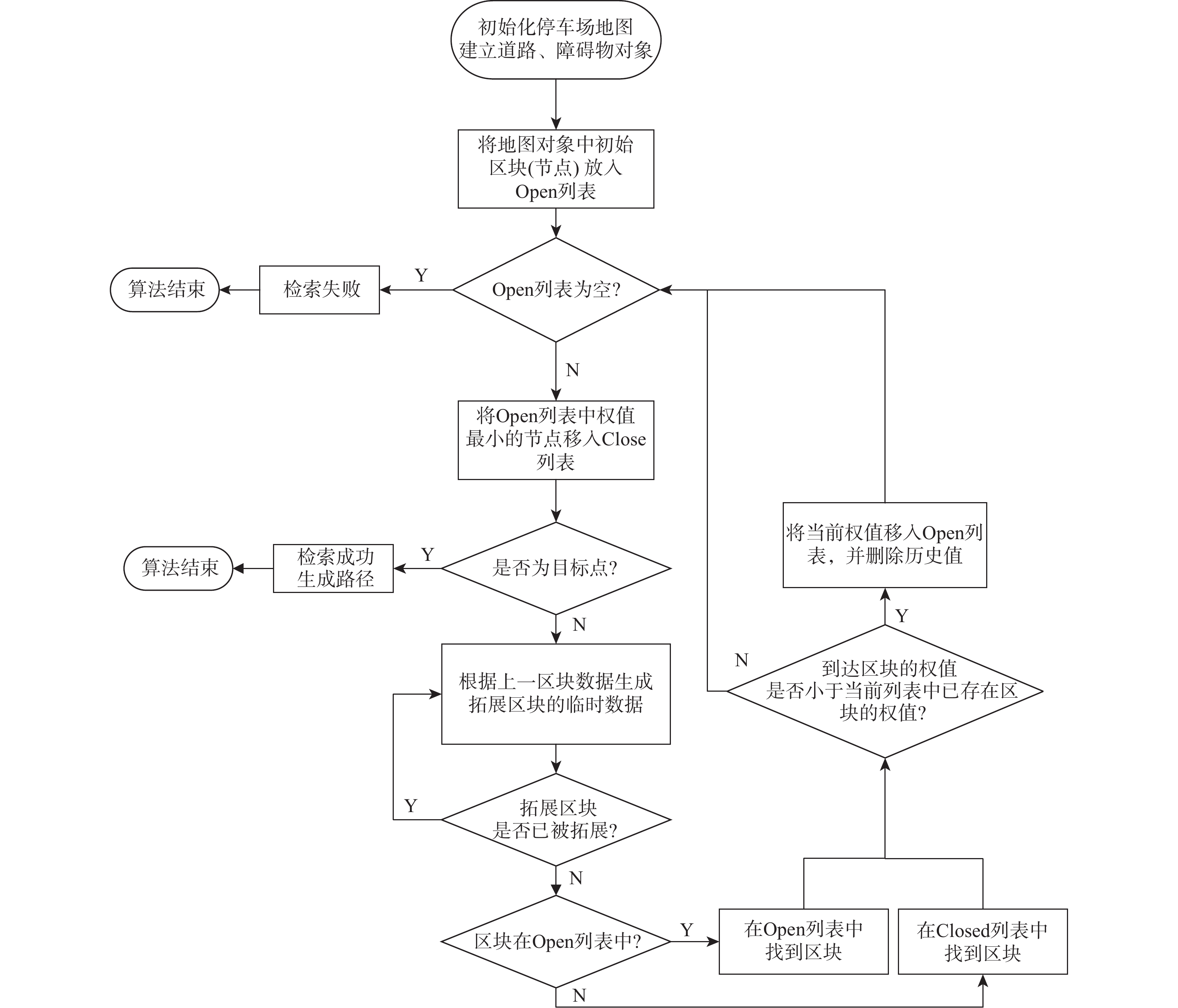
图 10 基于A*算法的停车场内部泊车诱导路径规划
Figure 10. Parking guidance path planning in the parking lot based on A* algorithm
表 1 停车场B2层模型参数
Table 1. Model parameters of parking lot B2 floor
物体 长/m 宽/m 泊位 6 3 车道 6 立柱(每组) 6 1  下载: 导出CSV
下载: 导出CSV
表 2 路径规划参数统计表
Table 2. Statistical table of path planning parameters
方案 起始点坐标/m 目标点坐标/m 路径代价/m 转弯代价 方案1 (8, 6) (84, 48) 96.91 12 方案2 (8, 6) (84, 48) 98.08 12
下载: 导出CSV
-
[1] 夏义年, 黄迪. 全视频智慧停车场综合解决方案[J]. 现代建筑电气, 2014, 5(1): 53-55. doi: 10.16618/j.cnki.1674-8417.2014.01.002XIA Y N, HUANG D. Integrated solutions of full video intelligent parking lot[J]. Modern Architecture Electric, 2014, 5(1): 53-55(in Chinese). doi: 10.16618/j.cnki.1674-8417.2014.01.002 [2] 陈绍红. 大型城市综合体智慧停车场解决方案[J]. 福建建材, 2015(7): 100-102.CHEN S H. Smart parking solution for large-scale urban complex[J]. Fujian Building Materials, 2015(7): 100-102(in Chinese). [3] 吴韶龙, 夏厚峰. 智能设备解决城市“停车难”[J]. 上海信息化, 2017(2): 60-63. doi: 10.3969/j.issn.1672-8424.2017.02.016WU S L, XIA H F. Intelligent devices solve the “parking difficulty” in cities[J]. Shanghai Informatization, 2017(2): 60-63(in Chinese). doi: 10.3969/j.issn.1672-8424.2017.02.016 [4] 李军伟. 大型地下停车场综合管理系统的设计与研究[D]. 济南: 山东建筑大学, 2017: 27-39.LI J W. Design and research of integrated management system for large underground parking[D]. Jinan: Shandong Jianzhu University, 2017: 27-39 (in Chinese) . [5] AI H, WANG F. The design of the intelligent parking system for urban business districts[J]. Transactions of the Institute of Measurement and Control, 2018, 40(1): 210-221. doi: 10.1177/0142331216652215 [6] 慕慧娟, 郑云林, 塔依尔·斯拉甫力. 智慧停车场在线计量云平台分析与设计研究[J]. 中国测试, 2021, 47(4): 124-129.MU H J, ZHENG Y L, TAYIER S. Research on analysis and design of intelligent parking lot online metering cloud platform[J]. China Measurement & Test, 2021, 47(4): 124-129(in Chinese). [7] TAO F, ZHANG M. Digital twin shop-floor: A new shop-floor paradigm towards smart manufacturing[J]. IEEE Access, 2017, 5: 20418-20427. doi: 10.1109/ACCESS.2017.2756069 [8] 陶飞, 刘蔚然, 刘检华, 等. 数字孪生及其应用探索[J]. 计算机集成制造系统, 2018, 24(1): 1-18. doi: 10.13196/j.cims.2018.01.001TAO F, LIU W R, LIU J H, et al. Digital twin and its potential application exploration[J]. Computer Integrated Manufacturing Systems, 2018, 24(1): 1-18(in Chinese). doi: 10.13196/j.cims.2018.01.001 [9] GABOR T, BELZNER L, KIERMEIER M, et al. A simulation-based architecture for smart cyber-physical systems[C]//2016 IEEE International Conference on Autonomic Computing. Piscataway: IEEE Press, 2016: 374-379. [10] MARCULESCU R, BOGDAN P. Cyberphysical systems: Workload modeling and design optimization[J]. IEEE Design & Test of Computers, 2011, 28(4): 78-87. [11] 陶飞, 程颖, 程江峰, 等. 数字孪生车间信息物理融合理论与技术[J]. 计算机集成制造系统, 2017, 23(8): 1603-1611. doi: 10.13196/j.cims.2017.08.001TAO F, CHENG Y, CHENG J F, et al. Theories and technologies for cyber-physical fusion in digital twin shop-floor[J]. Computer Integrated Manufacturing Systems, 2017, 23(8): 1603-1611(in Chinese). doi: 10.13196/j.cims.2017.08.001 [12] CAICEDO F, BLAZQUEZ C, MIRANDA P. Prediction of parking space availability in real time[J]. Expert Systems With Applications, 2012, 39(8): 7281-7290. doi: 10.1016/j.eswa.2012.01.091 [13] KLAPPENECKER A, LEE H, WELCH J L. Finding available parking spaces made easy[J]. Ad Hoc Networks, 2014, 12: 243-249. doi: 10.1016/j.adhoc.2012.03.002 [14] FRANK R J, DAVEY N, HUNT S P. Time series prediction and neural networks[J]. Journal of Intelligent and Robotic Systems, 2001, 31(1): 91-103. [15] ATHINEOS M, ELLIS D P W. Autoregressive modeling of temporal envelopes[J]. IEEE Transactions on Signal Processing, 2007, 55(11): 5237-5245. doi: 10.1109/TSP.2007.898783 [16] LIU S X, GUAN H Z, YAN H, et al. Unoccupied parking space prediction of chaotic time series[C]//International Conference of Chinese Tran sportation Professionals 2010. Reston: American Society of Civil Engineers, 2010: 2122-2131. [17] JIA W K, ZHAO D A, SHEN T, et al. An optimized classification algorithm by BP neural network based on PLS and HCA[J]. Applied Intelligence, 2015, 43(1): 176-191. doi: 10.1007/s10489-014-0618-x [18] CHEN H P, TU X H, WANG Y, et al. Short-Term parking space prediction based on wavelet-ELM neural networks[J]. Journal of Jilin University(Science Edition), 2017, 55(2): 388-392. [19] YANG Z S, CHEN X D. Research on the estimation for effective parking space of the intelligentized parking guidance system[J]. Journal of Transportation Systems Engineering and Information Technology, 2003, 3(4): 12-15. [20] YAN J N, MU L, WANG L Z, et al. Temporal convolutional networks for the advance prediction of ENSO[J]. Scientific Reports, 2020, 10: 8055. doi: 10.1038/s41598-020-65070-5 [21] 姚恩建, 张正超, 张嘉霖, 等. 居住区共享泊位资源优化配置模型及算法[J]. 交通运输系统工程与信息, 2017, 17(2): 160-167. doi: 10.16097/j.cnki.1009-6744.2017.02.024YAO E J, ZHANG Z C, ZHANG J L, et al. A model and algorithm for optimization of the utilization of residential shared parking slots[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(2): 160-167(in Chinese). doi: 10.16097/j.cnki.1009-6744.2017.02.024 [22] 褚鸿锐. 智能停车场反向寻车设计及管理系统实现[D]. 哈尔滨: 哈尔滨理工大学, 2018: 26-29.CHU H R. Design of intelligent parking reverse car searching and implementation of management system[D]. Harbin: Harbin University of Science and Technology, 2018: 26-29(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 561
- HTML全文浏览量: 113
- PDF下载量: 73
- 被引次数: 0
