



-
摘要:
码载分歧(CCD)监测器是卫星导航地基增强系统(GBAS)引入的完好性监测器之一,用于监测码伪距与载波相位观测值之间的不一致性。双频平滑技术的引入改变了CCD监测器的检验统计量等参数,进而影响了监测性能。针对双频GBAS中存在的频间偏差(IFB),基于北斗双频观测数据,分析IFB不确定性对于双频码载分歧监测性能的影响。研究结果表明:在IFB不确定性的影响下,监测器的阈值增大了26.1%,导致其在发生CCD故障情况下的漏检率显著增大,最小可检测故障值增大了26.9%,监测器的灵敏度降低;最坏情况下系统完好性损失概率从低于10−14增大到接近10−8,同时机载端为满足漏检率性能安全要求所引入的延迟值更大,导致CCD监测器的故障响应变慢,双频GBAS的完好性受到影响。
Abstract:Code carrier divergence (CCD) monitor is one of the integrity monitors introduced by ground-based augmentation systems (GBAS), which is used to monitor the inconsistency between code pseudorange and carrier phase observations. Dual-frequency smoothing technology changes the test statistics and other parameters of CCD monitor, which affect the monitoring performance. Considering the inter-frequency bias (IFB) introduced in dual-frequency GBAS, the impact of IFB uncertainty on the dual-frequency CCD monitoring is analyzed based on the dual-frequency observation data of BDS B1I and B3I signals. The results show that under the influence of IFB uncertainty, the threshold of the monitor increases by 26.1%, resulting in a significant increase of the probability of missed detection (PMD) in the case of CCD fault. And the minimum detectable fault increases by 26.9%, which means a decrease in the sensitivity of the monitor. Meanwhile, the probability of the loss of integrity in the worst case increases from less than 10−14 to nearly 10−8, and the delay introduced by the airborne to meet the PMD requirement is larger, resulting in a slower response of CCD monitor and impacts the integrity of dual-frequency GBAS.
-
地基增强系统(ground-based augmentation systems, GBAS)基于全球导航卫星系统(global navigation satellite system, GNSS)误差的时空相关性,将差分校正量和完好性信息广播给飞机,为飞机提供精确、安全、可靠的进近引导服务[1]。C类GBAS进近服务类型(GBAS approach service type C, GAST-C)使用单频信号进行定位和监测,受电离层异常等因素的影响较大,必须对定位误差进行非常保守的包络,限制了系统的性能,只能支持国际民航组织(International Civil Aviation Organization, ICAO)要求的CAT I类进近服务[2]。为了应对电离层异常威胁,D类GBAS进近服务类型(GBAS approach service type D, GAST-D)在GAST-C的基础上增加了若干完好性监测器,使系统可以满足CAT II/III类精密进近要求[3-4]。码载分歧(code carrier divergence, CCD)监测器是GAST-D引入的一类典型监测器,用来监测用户接收到的码伪距与载波相位测量值的不一致性。Xie[5]最早提出CCD监测算法和监测阈值的确定方法,并对监测器性能进行了初步测试[5]。Simili和Pervan[6]进一步完善了CCD监测算法和流程,并针对CCD故障完成了系统的完好性分析。目前,CCD监测算法已经被写入航空无线电技术委员会(Radio Technical Commission for Aeronautics, RTCA)制定的GBAS机载最低运行性能标准DO-253D[3]和欧洲民用航空设备组织(European Organization for CivilAviation Equipment, EUROCAE)制定的GBAS地面设备最低运行性能规范ED-114A[7]。
随着GNSS各星座的不断发展及多个频段新体制信号的加入,双频多星座(dual-frequency multi-constellation, DFMC )GBAS可以使用双频平滑技术来应对电离层活动对于系统的威胁[8]。目前主要使用2种双频平滑技术,即无分歧平滑(divergence-free smoothing, Dfree)和无电离层平滑(ionosphere-free smoothing, Ifree)[9]。Dfree使用单频伪距与双频载波相位测量值进行组合,虽然能在保持单频系统噪声水平的同时提供更精确的监测,但却只能消除部分电离层延迟误差。Ifree使用2个频率的伪距与载波相位测量值进行组合,可以完全消除电离层延迟误差,然而付出的代价却是测量噪声成倍增加,同时会在测量值中引入频间偏差(inter-frequency bias, IFB)[10]。目前提出的F类GBAS进近服务类型(GBAS approach service type F, GAST-F)也分为GAST-F SF模式和GAST-F IF模式[11],分别对应Dfree和Ifree,2种模式的转换取决于是否检测到电离层异常[12-13]。Jiang等[14]在单频CCD监测器的基础上提出针对GAST-F的双频CCD监测器,扩展到双频系统的CCD监测器是对于复杂故障空间下、多种故障源的联合监测。
IFB是不同频率的信号在接收机端产生的硬件延迟差异,属于差分码偏差(differential code bias, DCB)的接收机端分量,而卫星端分量通常称为卫星端群延迟(time group delay, TGD)[15]。IFB与接收机的结构参数有关,同时也会随着观测卫星(或其仰角)的不同而发生变化,双频载波相位观测量中的IFB与伪距相比可以忽略[10]。Ma和Maruyama[16]提出一种结合电离层总电子含量(total electron content, TEC)快速估计接收机IFB的方法,该方法在后续电离层研究中得到广泛应用。Holaschutz等[17]结合双频电离层观测值和三阶电离层球谐波模型,使用卡尔曼滤波对GPS监测站的DCB进行估计,但并没有对IFB和TGD进行分离。Li等[18]提出中国科学院测量与地球物理研究所DCB(institute of geodesy and geophysics DCB, IGGDCB)方法,结合广义三角级数局域电离层模型和最小二乘估计,使用TGD“零均值”条件分离得到IFB值。Liu等[19]借助北斗信号模拟器和接收机,使用“零伪距”法直接对IFB进行硬件层面的标定和校准。根据文献[16-19]中对IFB修正方法的研究可知,目前IFB难以精确修正,修正后的不确定度最小为0.1 m左右,该IFB不确定性会作为Ifree平滑伪距中的误差项,对使用Ifree伪距相关检验统计量的双频CCD监测器产生影响。
首先,介绍目前单频和双频GBAS中的CCD监测器算法,进而,对GBAS站参考接收机IFB不确定性进行估计,推导其与监测器检验统计量之间的关系,接着,基于北斗双频观测数据完成标称情况下的监测器特性建模,最后,结合仿真结果对双频CCD监测器性能受IFB不确定性的影响进行验证和分析。
1. 码载分歧监测
CCD故障是在用户端观测到的一种典型故障,表现为码伪距与载波相位测量值的不一致性。针对此类故障,目前已经提出单频和双频CCD监测器,分别应用于GAST-D和GAST-F完好性监测。
1.1 单频CCD监测器
CCD监测器的输入量是码减载波(code minus carrier, CMC)的变化率。CCMC的计算式为[14]
CCMC=ρ−φ (1) 式中:ρ为原始伪距观测量;φ为原始载波相位观测量。
k时刻CCD监测器的输入量z(k)为[14]
z(k)=CCMC(k)−CCMC(k−1)Δ (2) 式中:Δ为数据的采样间隔。
CCD监测器的核心结构是级联一阶低通滤波器,其时域表达式为[6]
{d1(k)=τ1−T0τ1d1(k−1)+1τ1[z(k)−z(k−1)]d2(k)=τ2−T0τ2d2(k−1)+T0τ1d1(k−1) (3) 式中:τ1和τ2分别为2个一阶低通滤波器的滤波时间常数;T0为数据的采样率;d1和d2为滤波器的输出,即CCD监测器的检验统计量。
通常在拉普拉斯域内分析CCD监测器的稳态响应,其表达式为[6]
Fm=1(τ1s+1)(τ2s+1) (4) 式中:s为拉普拉斯算子。
滤波器输出的检验统计量为[6]
ˆD(s)=FmZ(s) (5) 达到稳态后[14]:
lims→0FmZ(s)=s2(τ1s+1)(τ2s+1)⋅ds2=d (6) 稳态值d就是待检测的码载波分歧的速率值,将其与阈值比较来对CCD故障进行监测。
1.2 双频CCD监测器
北斗B1I和B3I这2个频率上的原始伪距观测量为
P1=R+ts+tr+I1+T+M1+ε1+IFB+TGD (7) P3=R+ts+tr+I3+T+M3+ε3 (8) 式中:R为卫星与用户之间的真实距离;ts为卫星钟差;tr为接收机钟差;I为电离层延迟,与导航信号的频率有关;T为对流层延迟;M为多径误差;ε为热噪声;IFB为接收机频间偏差;TGD为卫星端群延迟。
载波相位测量值与式(7)和式(8)类似。北斗卫星导航系统(BeiDou navigation satellite system, BDS)卫星钟差以B3I频率的天线相位中心为时空零基准,钟差中包含B3I频率的硬件延迟。因此,可以将B1I与B3I的伪距硬件延迟不一致的部分仅写在B1I的伪距表达式中。
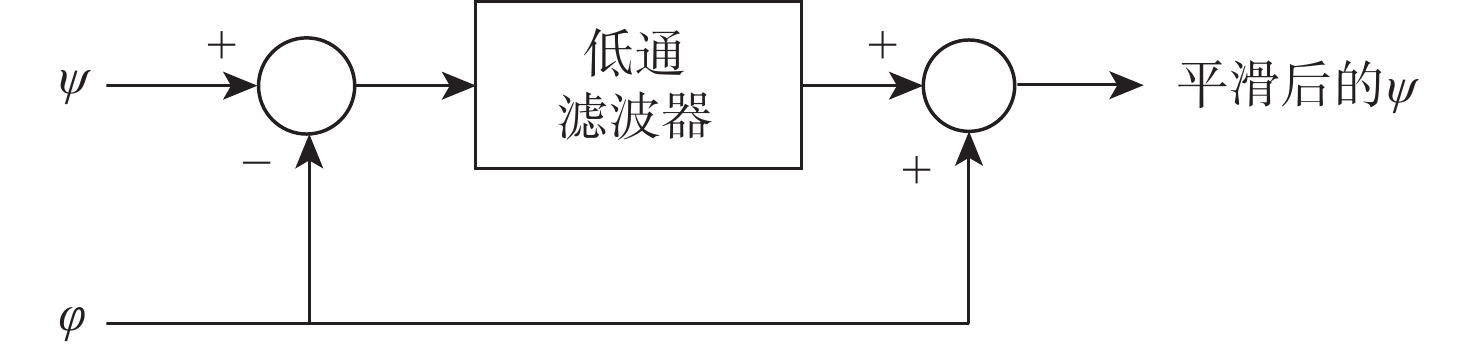
目前的GAST-F处理模式,正常情况下系统使用单频观测量进行定位,使用Dfree平滑进行监测。当机载端监测到电离层异常时,系统将从Dfree平滑模式转换为Ifree平滑模式,使用Ifree平滑进行定位和监测[11],GBAS载波平滑处理过程如图1所示。
其中ψ代表码伪距。对于Ifree平滑,ψ和φ分别为 [13]
ψIfree=P3−1α(P3−P1) (9) φIfree=φ3−1α(φ3−φ1) (10) 式中:α为与所使用信号的频率相关的系数,表达式为
α=1−f23/f21 (11) 其中:f1为B1I的中心频率;f3为B3I的中心频率。
实际上,由于GBAS是一个差分系统,卫星端TGD会在机载端差分校正的过程中被消除掉,因此,后续分析中省略了TGD项。Ifree平滑后的伪距、载波相位表达式为[10]
ρIfree=R+ts+tr+T+ηρ3−1α(ηρ3−ηρ1)+1αIFB (12) φIfree=R+ts+tr+T+ηφ3−1α(ηφ3−ηφ1)+εN (13) 式中:ηρ和ηφ分别为原始伪距和载波相位观测量中的多径和热噪声;εN为载波相位整周模糊度误差,在前后差分过程中被消除,因此,忽略此项。
双频CCD监测器与单频CCD监测器的区别主要在于检验统计量的变化,在双频CCD监测中,针对Ifree平滑滤波方式一共有3类原始输入量,分别为[14]
χIFρ=γγ−1ρ1−1γ−1ρ3 (14) χIFφ=γγ−1φ1−1γ−1φ3 (15) χIF=χIFρ−χIFφ (16) 式中:γ为Ifree组合的频率因子[14]:
γ=f23/f21 (17) 由于式(14)和式(15)需要针对卫星移动、接收机和卫星钟差及对流层延迟进行补偿和校正[14],主要对式(16)中χIF进行研究,此输入量更符合CCD监测器的设计初衷。
2. IFB不确定性的影响
IFB是不同频率的信号在接收机端产生的硬件延迟差异,其与接收机的结构参数有关。Ifree平滑使用2个频率的伪距观测值引入了IFB,虽然双频CCD监测器是对码载分歧的速率进行监测,但是受周围环境的影响,IFB会在一定范围内随机变化,存在不确定性,并最终影响监测性能,带来潜在的完好性风险。
2.1 IFB不确定性估计
结合式(7)和式(8)所示2个频率的伪距测量值可以得到2个频率上伪距的差值:
P1−P3=I1−I3+IFB+TGD (18) 理论上,式(18)中还应该包括这2个频率之间天线群延迟变化量(group delay variations, GDV)的差,其是所观测卫星的仰角、方位角和所用频率的函数[20]。但根据Beer等[21]的研究,即使在最坏情况下,1561.098 MHz(B1I的中心频率)和1268.520 MHz(B3I的中心频率)对应的GDV差值与IFB相比也要小得多。因此,式(18)中并未考虑GDV。
需要使用电离层总电子含量(total electron content, TEC)产品将式(18)中的2个频率电离层延迟的差值从双频伪距差值中扣除。使用TEC产品计算电离层延迟的方法为[17]
I=40.28f2FVTEC (19) 式中:F为倾斜因子;f为所使用信号对应的频率;VTEC为垂直方向TEC值。
根据TEC与电离层延迟的关系,将式(18)改写为
IFB+TGD=P1−P3−40.28(1f21−1f23)FVTEC (20) 使用IGS GNSS联合实验室(The Multi-GNSS Experiment, MGEX)公布的卫星端DCB产品将TGD扣除掉,从而实现式(20)中IFB与TGD的分离。
同时,使用中国东营胜利机场(ZSDY)GBAS站于2019年11月24日至2020年1月2日收集到的32天B1I和B3I观测数据估计地面接收机IFB的标准差,将其作为IFB不确定性,最终得到的平均结果为0.14 m。采用相同的方法对用户接收机的IFB不确定度进行标定,得到的结果为0.22 m。虽然IFB统计特性存在波动性,但通过采集东营GBAS站实际运行的观测数据进行较长时间的IFB不确定性统计分析,所得的结果与参考文献[15]中的近似,因此具有一定的典型性。
2.2 IFB不确定性与检验统计量
IFB时间序列存在不确定性,即相邻历元之间的IFB也会出现差值,此误差会存在于检验统计量χIF及整个检测流程中。将式(12)和式(13)代入式(15)中,可得
χIF=ηρ3−1α(ηρ3−ηρ1)−ηφ3+1α(ηφ3−ηφ1)+1αεIFB (21) 式中:ηϕ比ηρ的量级小很多,通常忽略;εIFB为IFB前后历元做差后剩余的残差,即IFB不确定性带来的误差。
双频CCD监测器的检验统计量是监测器其他参数的解算基础,此IFB不确定性带来的测距误差会进一步影响监测器在标称情况下的阈值设定、故障情况下的漏检率(probability of missed detection, PMD)、完好性损失(loss of integrity, LOI)概率及PMD安全性能等。
3. 标称情况下的监测器特性
分析IFB不确定性对双频CCD监测器的影响,需要从标称情况和故障情况2方面展开。首先,使用标称情况下的B1I和B3I双频观测数据,计算标称情况下检验统计量的统计特性,对双频CCD监测器的阈值建模。
3.1 检验统计量特性
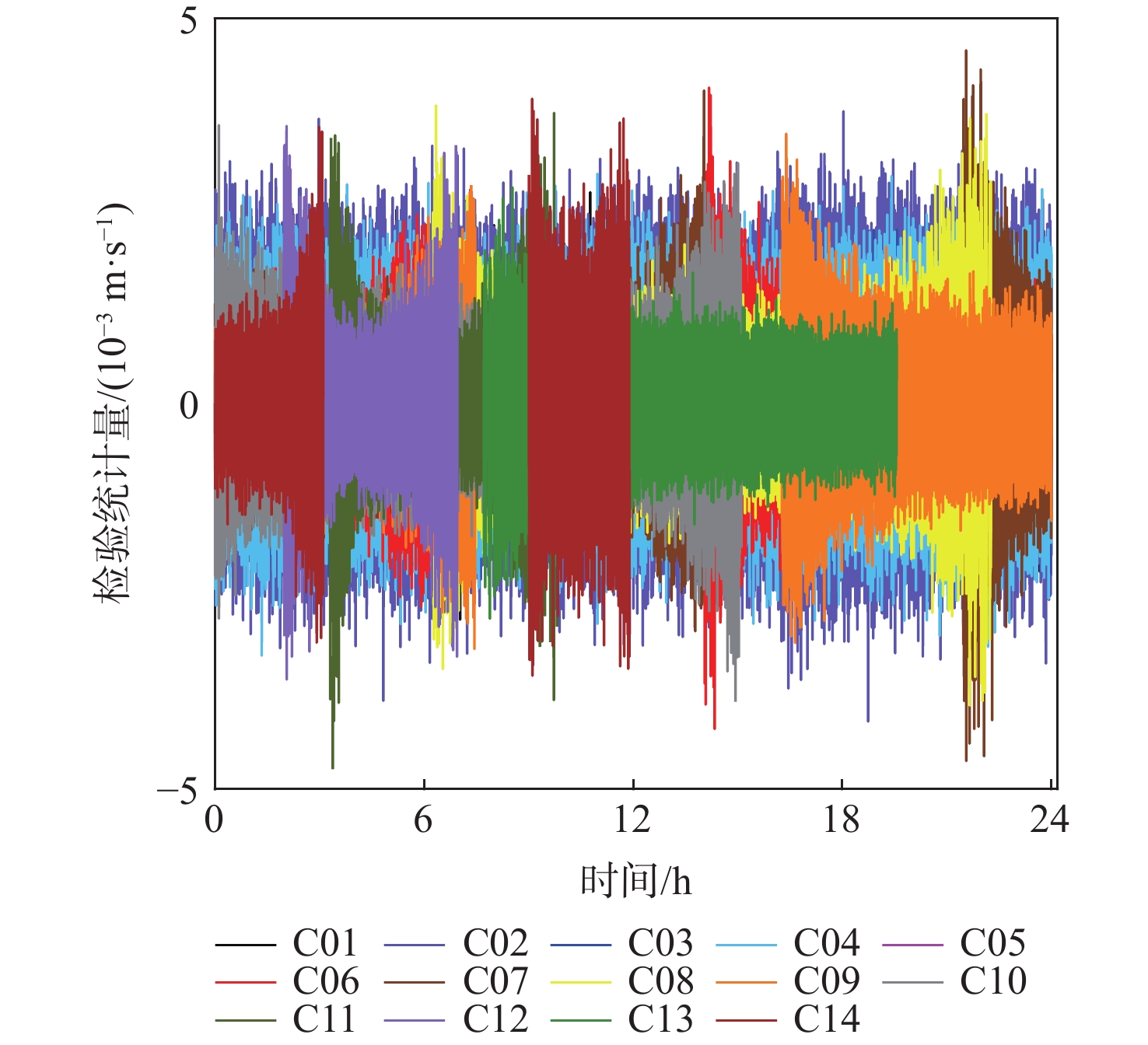
选用东营机场GBAS站于2021年1月20日收集到的B1I和B3I数据进行CCD监测器的建模和性能分析,数据采样间隔Δ为0.5 s,2个一阶滤波器的时间常数均为30 s。将Ifree CMC输入到双频CCD监测器中,得到的检验统计量时间序列如图2所示。北斗GEO卫星对应的检验统计量较为稳定。受可见性影响,IGSO卫星和MEO卫星对应的检验统计量在卫星进入视野和退出视野时会出现明显峰值,但都在5×10−3 m/s内。
3.2 阈值设定
双频CCD监测器监测阈值的确定方法是对标称情况下检验统计量的标准差进行膨胀包络,使其满足为CCD故障分配的完好性风险概率要求[6],即
TCCD=kffdINFσd (22) 式中:kffd为使监测器满足完好性要求的膨胀系数,取值为5.83[3];INF为用来包络厚尾分布的膨胀系数;σd为标称情况下检验统计量的标准差。
图2表明在观测期间内并没有CCD故障出现,属于标称情况,可以用于双频CCD监测器阈值的计算。
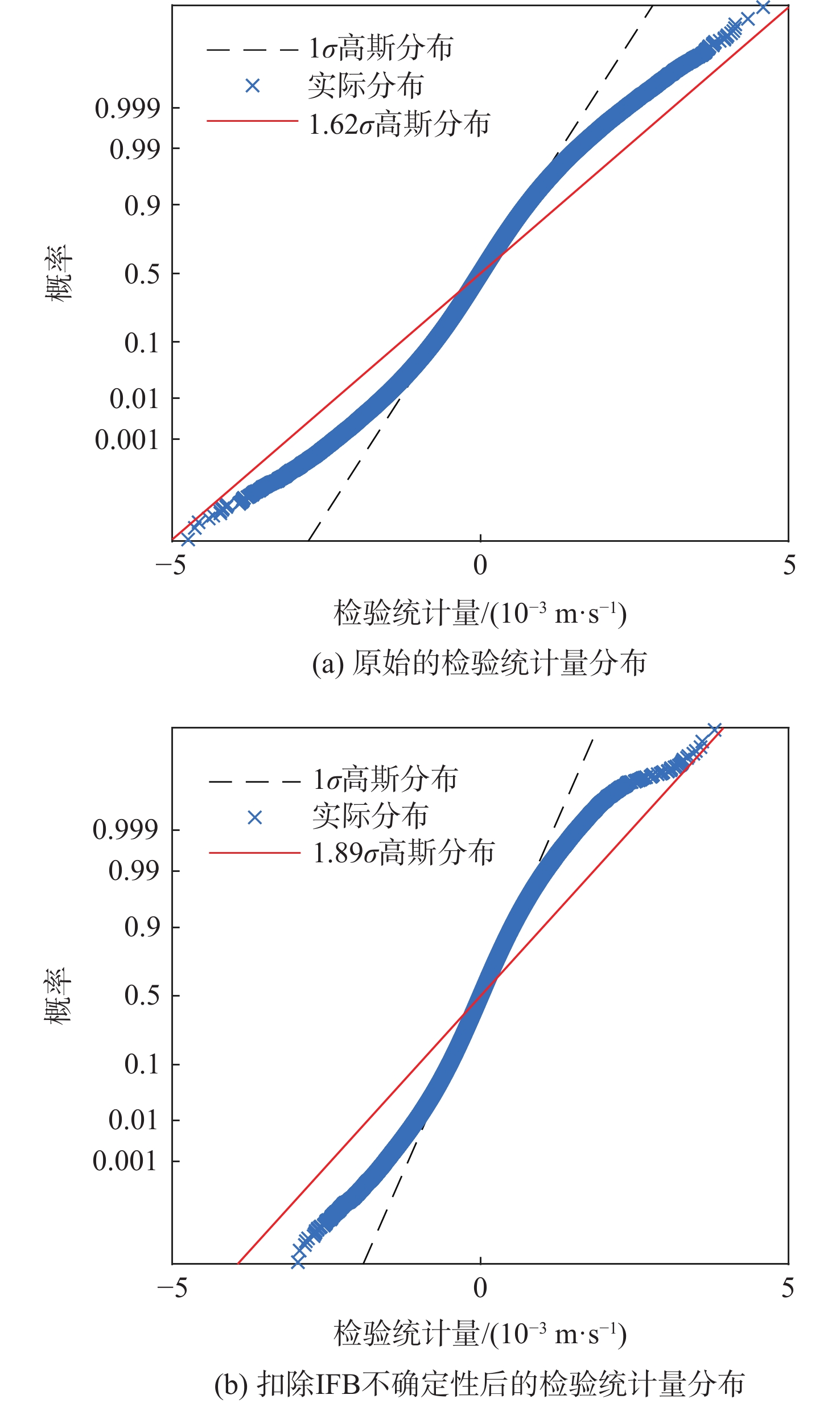
图3为校验统计量分布,图3(a)为原始检验统计量的分位数图(quantile quantile plot,Q-Q),蓝色数据点表示原始检验统计量,符合零均值的高斯分布,但是存在厚尾的情况,因此,需要使用INF膨胀系数对其标准差进行包络。灰色虚线对应原始检验统计量的标准差,为6.22×10−4 m/s,红色实线对应膨胀后的标准差,INF为1.62,包络后的标准差为0.0010 m/s。
为了分析CCD监测阈值受IFB不确定性的影响,使用第2.1节中的标定结果将IFB不确定性从原始输入量中扣除,形成不包含IFB不确定性的检验统计量。此处理方法的前提是IFB与其他误差不相关。需要注意,由此得到的新检验统计量仅用于分析双频CCD监测器受IFB不确定性的影响,在实际CCD监测中无法得到。
图3(b)为扣除IFB不确定性后的检验统计量累积分布函数(cumulative distribution function,CDF)分布图,图3(b)中的蓝色数据点表明此时的检验统计量仍符合零均值的高斯分布,且存在厚尾的情况,但是由于标准差减小,曲线的斜率更大。灰色虚线对应包络前的标准差,为4.17×10−4 m/s,红色实线对应膨胀包络后的标准差,INF为1.89,膨胀后的标准差为7.88×10−4 m/s。
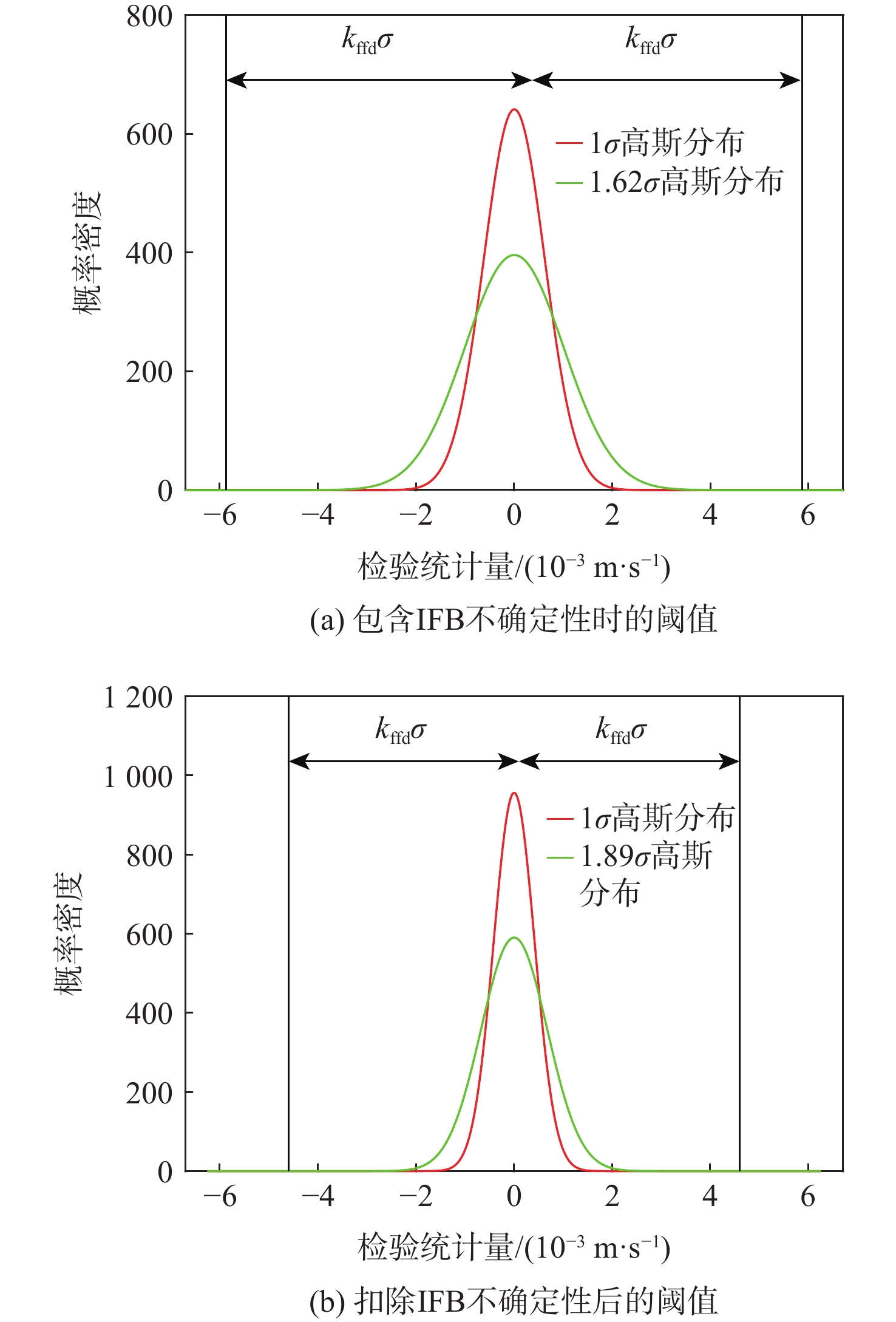
图4为双频CCD监测器阈值,采用式(22)中的计算方法,得到双频CCD监测器的阈值为0.0058 m/s,如图4(a)中的黑色实线所示。使用扣除IFB不确定性后的检验统计量标准差计算得到的阈值为0.0046 m/s,如图4(b)所示。受IFB不确定性的影响,双频CCD监测器的阈值增大了26.1%。
2种情况的阈值设定对比如表1所示,即IFB不确定性导致双频CCD监测器的阈值增大了0.12 m/s。由于使用kffd膨胀使监测器满足完好性要求,所以二者在标称情况下的误警率不受影响。但是对于CCD故障情况,阈值的增大则会导致监测性能明显下降。
表 1 监测阈值比较Table 1. Comparison of monitoring threshold仿真试验场景 原始标准差/
(10−4 m·s−1)包络标准差/
(10−4 m·s−1)阈值/
(10−4 m·s−1)包含IFB不确定性 6.22 10 58 扣除IFB不确定性 4.17 7.88 46 4. 故障情况下的监测性能
CCD故障以均值偏移故障为主[22],且出现故障的概率非常小,所以基于仿真试验,对CCD均值偏移情况下双频CCD监测器性能受IFB不确定性的影响进行验证分析。
4.1 漏检率
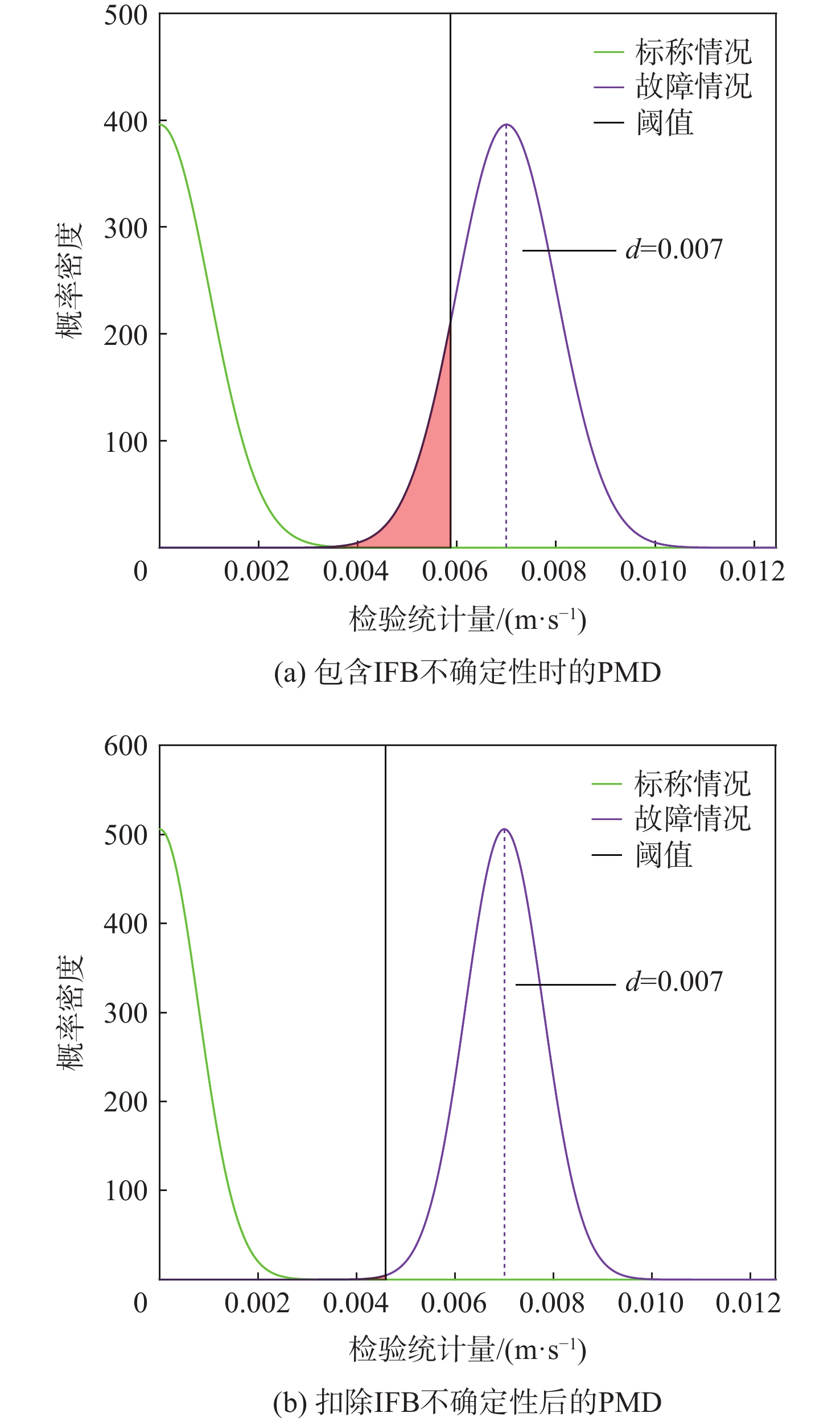
对于给定的CCD均值偏移故障,PMD定义为故障条件下检验统计量小于监测阈值的概率。3.2节提到的2种检验统计量对应的2个监测阈值,其对应的PMD如图5所示。
以故障d=0.007 m/s为例,图5中PMD对应紫色概率分布中位于黑色实线左侧的概率,即图中红色区域。对比图5(a)和图5(b),对于给定的0.007 m/s均值偏移故障,使用包含IFB不确定性的原始检验统计量计算阈值,双频CCD监测器的PMD达到11.68%;而使用扣除IFB不确定性的检验统计量计算阈值,PMD仅为0.12%。不同故障情况下的PMD对比如表2所示。
表 2 不同监测阈值对应的漏检率对比Table 2. Comparison of PMD related to different monitoring thresholds监测阈值/(m·s−1) PMD1 PMD2 7×10−5 11.68 0.12 8×10−5 1.39 7.99×10−4 9×10−7 6.87 1.18×10−4 1×10−7 1.33 3.62×10−7 1.1×10−10 9.96 2.29×10−8 表中:PMD1表示包含IFB不确定性的仿真场景对应的漏检率,PMD2表示扣除IFB不确定性的仿真场景对应的漏检率。表2数据表明,对于同一CCD故障,IFB不确定性会导致双频CCD监测器的PMD显著增大,尤其对于偏移较小的故障,增大的更加明显。
4.2 最小可检测故障
最小可检测故障表示在给定的PMD要求下,监测器能够检测出的最小故障值,其表征监测器的检测灵敏度。
图6为2种监测阈值对应的双频CCD监测器的最小可检测故障值,其值为图中曲线与10−9PMD对应横轴的交点,其中蓝色曲线对应扣除IFB不确定性的监测器,其最小可检测故障为0.0093 m/s;红色曲线对应包含IFB不确定性的监测器,其最小可检测故障为0.0118 m/s,增大了26.9%。
对比二者可以得出结论,IFB不确定性导致双频CCD监测器的最小可检测故障值增大,即监测器的灵敏性降低。
4.3 完好性损失概率
在分析系统的完好性损失概率之前,需要对CCD故障导致的误差进行分析。由于GAST-F涉及2个频率下的伪距和载波相位观测量,具有多种故障模式,在此只对单故障模式进行分析,即某一频率的伪距或载波相位观测量出现故障。多故障模式在大多数情况下是单故障模式的线性叠加。CCD误差分析的仿真条件如表3所示。
表 3 CCD故障误差分析的仿真条件Table 3. Simulation conditions of CCD fault error analysis参数 数值 CCD监测器滤波时间常数τm/s 30 Hatch滤波的时间常数τ/s 100 CCD故障发生的时刻tf/s 450 地面双频CCD监测器初始化时刻tg,0/s 0 机载双频CCD监测器初始化时刻ta,0/s 600 从机载滤波器初始化到将测量值
应用于定位解的时间延迟tdelay/s0, 50 地面端延迟τG/s 1.5 数据及完好性信息的更新率fC/Hz 2 仿真时间t/s [0∶0.5∶1800] 故障d/( m·s−1) 0.001 监测器初始化是指由于失锁等原因导致的监测器重启初始化。当ta,0>tf,即CCD故障发生在机载监测器初始化之前,此时监测效果处于最坏情况,因此,仅分析双频CCD监测器在最坏情况下的监测性能。仿真时间t为1800 s,以0.5 s步进。置入故障d=0.001 m/s,对应于双频CCD监测器的最小可监测故障值。
地面端和机载端都会对CCD故障进行监测,图7为由CCD故障导致的平滑误差,MC1表示B1I频率伪距出现CCD故障导致的误差,MC3表示B3I频率伪距出现CCD故障导致的误差,MP1表示B1I频率载波相位出现CCD故障导致的误差,MP3表示B3I频率载波相位出现CCD故障导致的误差。对比图中各条曲线可以看出,无论是在机载端还是地面端,MC1和MC3故障造成的平滑误差更大,且误差不会收敛;相比而言,MP1和MP3故障造成的平滑误差要小的多,并且误差最终会收敛为一个恒定值。
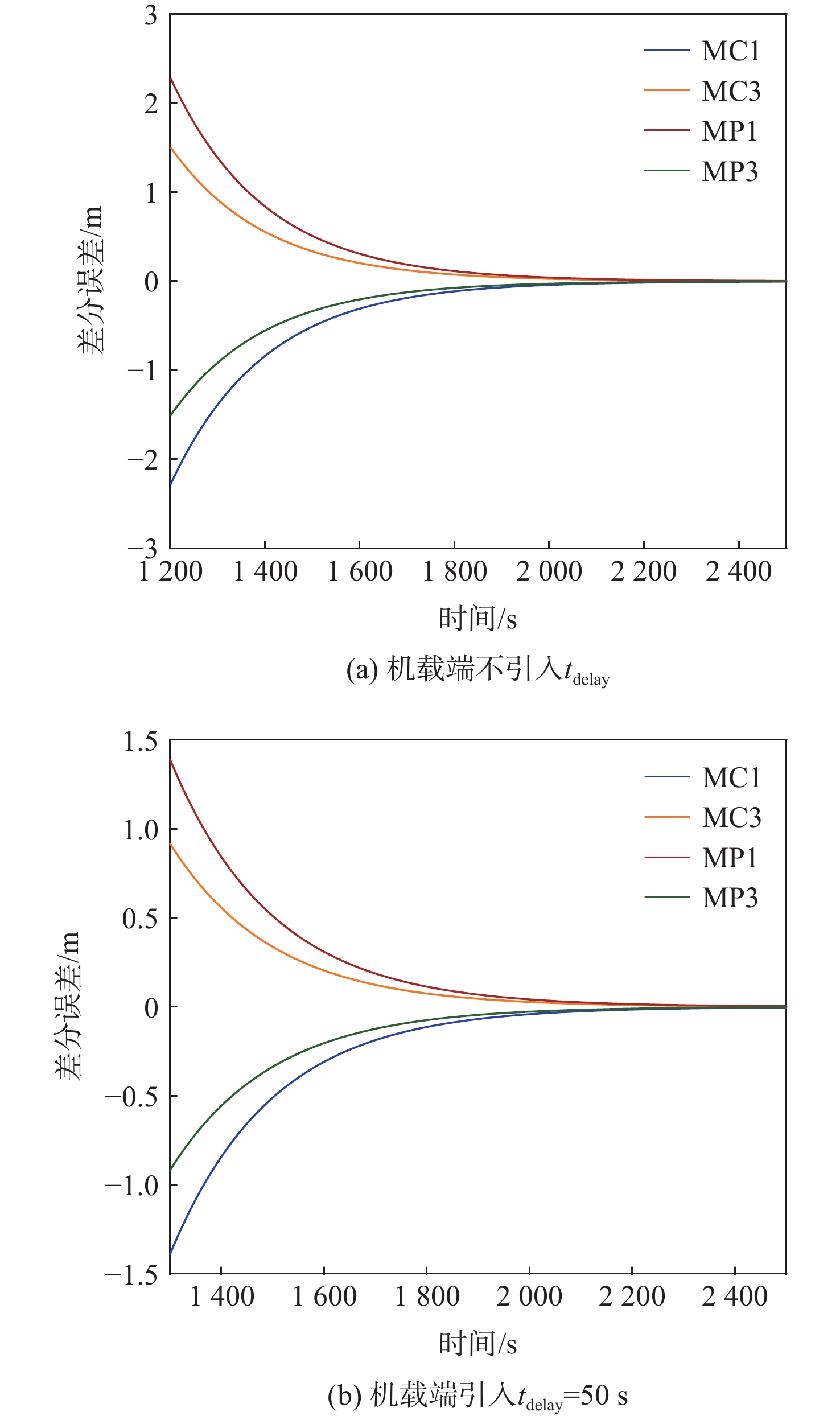
图8为机载端使用地面端广播的差分校正量后得到的由于CCD故障导致的差分误差。对比图8(a)和图8(b),当tdelay=0时,差分误差需要经过600 s左右才会从最大值2.35 m收敛为0,而如果在机载端应用了tdelay=50 s,差分误差将大幅度减小,最大值为1.39 m,但是误差收敛到0的时间没有明显变化。基于以上分析得到的差分误差,进一步分析IFB不确定性影响下系统完好性损失的概率。
故障情况下,系统完好性损失的概率定义为:定位误差大于保护级且监测器检验统计量小于阈值的概率,如式(23)所示[6]:
P(L|fk)=P(|ev|>V|fk)⋅P(|qk|<kffd,monσr,k|fk) (23) 式中:ev为差分定位误差的垂直分量;V为垂直保护级;qk为监测器对于卫星k的检验统计量;kffd,monσr,k为监测阈值。
将式(23)化简,最终得到[6]
P(L|fk)=Q{|bk|σk−kffmd}⋅Q{kffd,mon−|rk|σr,k} (24) 式中:Q为标准正态分布的右尾函数(Q函数);bk为由于故障导致的差分误差;σk为卫星k用于计算保护级的非相关误差项;rk为故障值;σr,k为标称情况下检验统计量的标准差。
对于双频CCD监测器,设定的仿真条件为:bk=[0:0.01:1.5] m,rk=0.01 m/s。
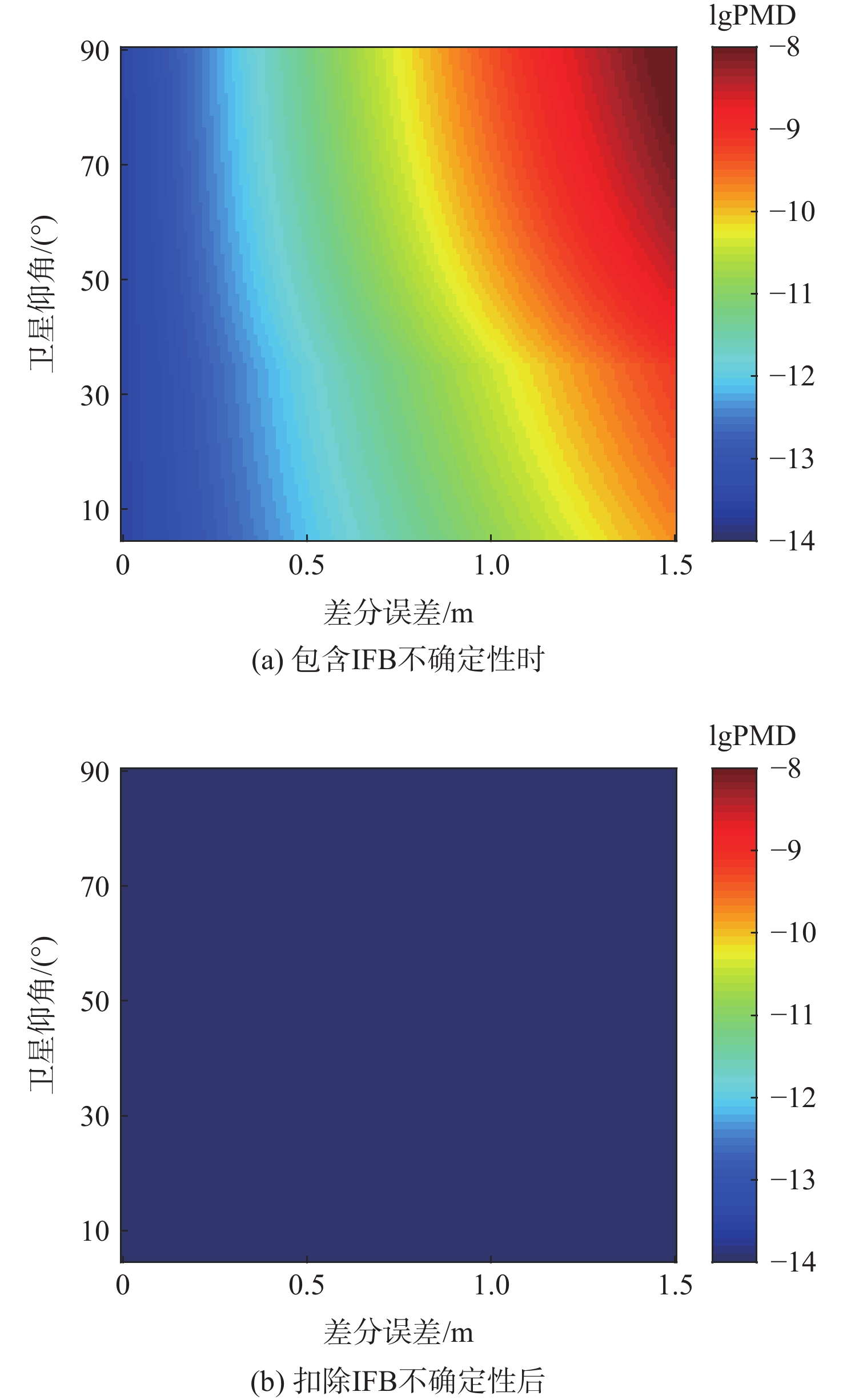
图9为完好性损失概率。图9(a)为使用包含IFB不确定性的检验统计量构造的双频CCD监测器对应的完好性损失概率,横坐标变量为差分误差ER,纵坐标变量为卫星仰角,不同颜色代表概率大小。图9(a)中大部分区域能够满足10−9的完好性要求,但是在高仰角位置却达到了10−8,不满足完好性要求;当从检验统计量中扣除掉IFB不确定性后,如图9(b)所示,在最坏情况下完好性损失概率也在10−14以下,符合完好性要求。对比结果表明,IFB不确定性导致双频CCD监测器对应的系统完好性损失概率上升,给双频GBAS带来了一定的完好性风险。
4.4 PMD性能安全验证
ICAO提出伪距域PMD要求的目的是对航空导航领域的各类监测器进行性能测试,以检验其是否能满足飞行器安全需求。对于特定的差分误差ER,PMD计算式为[14]
PMD(|ER(t)|)=PMD(f−1(ER(t+TTTDABA−τG))) (25) 式中:f−1为概率1减去对应的Q函数;TTTDABA为差分误差达到ER的时间点与地面站发送最后1 比特完好性信息的时间点之间的差值,GAST-D中规定的告警时间是2.5 s,TTADBA要求值为1.5 s,留1 s裕度给可能出现的延迟和消息丢失,GAST-F延用此值[14]。为了验证IFB不确定性对于双频CCD监测器性能安全的影响,开展了仿真试验,仿真条件与表4中所示基本相同,唯一改变的是置入故障d改为从0~0.02 m/s以0.0001 m/s步进,即d=[0:0.0001:0.02] m/s。
表 4 为满足PMD要求在机载端引入的最小tdelay值Table 4. Minimum tdelay introduced in airborn to meet PMD requirements故障模式 包含IFB不确定性/s 扣除IFB不确定性/s MC1 (MP1) 50 22 MC3 (MP3) 6 0 图10为tdelay=0时对应的双频CCD监测器性能安全验证结果,其中红色曲线为ICAO规定的PMD要求,蓝色曲线为监测器对应的PMD值,不超过红色曲线便满足性能要求。从图10可以看出,如果机载端tdelay=0,在MC1或MP1故障模式下,无论是否扣除IFB不确定性,双频CCD监测器的性能安全都不符合PMD要求;在MC3或MP3故障模式下,包含IFB不确定性的双频CCD监测器仍不满足PMD要求,但是扣除IFB不确定性后双频CCD监测器的却可以满足PMD要求。可见,如果tdelay=0,则IFB不确定性会导致双频CCD监测器在MC3或MP3故障模式下的PMD符合性发生变化,机载端需要引入一定值的tdelay。
 图 10 监测器性能安全验证(tdelay=0)Figure 10. Monitor performance safety verification (tdelay=0)
图 10 监测器性能安全验证(tdelay=0)Figure 10. Monitor performance safety verification (tdelay=0)图11为tdelay=50 s时对应的双频CCD监测器性能安全验证结果,此时所有故障情况下都满足PMD要求。对比图11(a)和图11(b)可以看出,在MC1或MP1故障模式下,扣除IFB不确定性之后的双频CCD监测器性能安全曲线距离PMD要求曲线有一定的裕度,这说明tdelay可以适当减小,进一步仿真表明此时满足PMD要求的tdelay最小值为22 s。对比图11(c)和图11(d)可以得出相似结论。
 图 11 监测器性能安全验证(tdelay=50 s)Figure 11. Monitor performance safety verification (tdelay=50 s)
图 11 监测器性能安全验证(tdelay=50 s)Figure 11. Monitor performance safety verification (tdelay=50 s)tdelay的大小表征了双频CCD监测器的响应时间,tdelay越小,监测器对于CCD故障的检测时间越短。仿真结果表明,为满足ICAO对PMD的要求,IFB不确定性会导致机载端tdelay值增大,即导致双频CCD监测器的检测时间变长,响应变慢。各种故障情况下机载端引入的最小tdelay值如表4所示。机载端所需引入的最小tdelay值对于B1I和B3I频率单故障分别增大了28 s和6 s。
5. 结 论
1) 受IFB不确定性的影响,双频CCD监测器的阈值TCCD由0.0046 m/s增长到0.0058 m/s,增大了26.1%。
2) 故障情况下,双频CCD监测器的PMD随着故障值的减小而显著增大。
3) 双频CCD监测器的最小可检测故障值增大了26.9%,灵敏度降低。
4) 最坏情况下,系统完好性损失的概率从低于10−14增大到接近10−8。
5) 为满足PMD安全要求,机载端所需要引入的最小tdelay值对于B1I和B3I频率单故障分别增大了28 s和6 s,双频CCD监测器的响应变慢。
-

图 10 监测器性能安全验证(tdelay=0)
Figure 10. Monitor performance safety verification (tdelay=0)

图 11 监测器性能安全验证(tdelay=50 s)
Figure 11. Monitor performance safety verification (tdelay=50 s)
表 1 监测阈值比较
Table 1. Comparison of monitoring threshold
仿真试验场景 原始标准差/
(10−4 m·s−1)包络标准差/
(10−4 m·s−1)阈值/
(10−4 m·s−1)包含IFB不确定性 6.22 10 58 扣除IFB不确定性 4.17 7.88 46  下载: 导出CSV
下载: 导出CSV
表 2 不同监测阈值对应的漏检率对比
Table 2. Comparison of PMD related to different monitoring thresholds
监测阈值/(m·s−1) PMD1 PMD2 7×10−5 11.68 0.12 8×10−5 1.39 7.99×10−4 9×10−7 6.87 1.18×10−4 1×10−7 1.33 3.62×10−7 1.1×10−10 9.96 2.29×10−8
下载: 导出CSV
表 3 CCD故障误差分析的仿真条件
Table 3. Simulation conditions of CCD fault error analysis
参数 数值 CCD监测器滤波时间常数τm/s 30 Hatch滤波的时间常数τ/s 100 CCD故障发生的时刻tf/s 450 地面双频CCD监测器初始化时刻tg,0/s 0 机载双频CCD监测器初始化时刻ta,0/s 600 从机载滤波器初始化到将测量值
应用于定位解的时间延迟tdelay/s0, 50 地面端延迟τG/s 1.5 数据及完好性信息的更新率fC/Hz 2 仿真时间t/s [0∶0.5∶1800] 故障d/( m·s−1) 0.001
下载: 导出CSV
表 4 为满足PMD要求在机载端引入的最小tdelay值
Table 4. Minimum tdelay introduced in airborn to meet PMD requirements
故障模式 包含IFB不确定性/s 扣除IFB不确定性/s MC1 (MP1) 50 22 MC3 (MP3) 6 0
下载: 导出CSV
-
[1] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2017.XIE G. Principles of GPS and receiver design[M]. Beijing: Publishing House of Electronics Industry, 2017 (in Chinese). [2] Radio Technical Commission for Aeronautics (RTCA) Special Committee 159 (SC-159). Minimum operational performance standards for GPS local area augmentation system airborne equipment: DO-253C[S]. Washington, D. C. : RTCA, 2008. [3] Radio Technical Commission for Aeronautics (RTCA) Special Committee 159 (SC-159). Minimum operational performance standards for GPS local area augmentation system airborne Equipment: DO-253D[S]. Washington, D. C. : RTCA, 2017. [4] International Civil Aviation Organization (ICAO) Navigation Systems Panel (NSP). GBAS CAT II/III development baseline SARPs[S]. Montreal: ICAO, 2010. [5] XIE G. Optimal on-airport monitoring of the integrity of GPS-based landing systems[D]. Stanford: Stanford University, 2004. [6] SIMILI D V, PERVAN B. Code-carrier divergence monitoring for the GPS local area augmentation system[C]// 2006 IEEE/ION Position, Location, and Navigation Symposium. Piscataway: IEEE Press, 2006. [7] European Organization for Civil Aviation Equipment (EUROCAE). Minimum operational performance specification for global navigation satellite ground based augmentation system ground equipment to support category I operations: ED-114A[S]. SaintDenis: EUROCAE, 2013. [8] KONNO H. Dual-frequency smoothing for CAT III LAAS performance assessment considering ionosphere anomalies[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007). Fort Worth: The Institute of Navigation, 2007: 424-437. [9] SUNG Y T, LIN Y W, YEH S J, et al. A dual-frequency ground based augmentation system prototype for GPS and BDS[C]// Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2019). Fort Worth: The Institute of Navigation, 2019: 628-636. [10] CIRCIU M S, MEURER M, FELUX M, et al. Evaluation of GPS L5 and Galileo E1 and E5a performance for future multifrequency and multiconstellation GBAS[J]. Navigation, 2017, 64(1): 149-163. doi: 10.1002/navi.181 [11] FELUX M, CIRCIU M, BELABBAS B, et al. Concept for a dual frequency dual constellation GBAS[C]// Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2015). Fort Worth: The Institute of Navigation, 2015: 1519-1525. [12] KONNO H, PULLEN S, RIFE J, et al. Ionosphere monitoring methodology for hybrid dual-frequency LAAS[C]// Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006). Fort Worth: The Institute of Navigation, 2006: 409-424. [13] KONNO H, PULLEN S, RIFE J, et al. Evaluation of two types of dual-frequency differential GPS techniques under anomalous ionosphere conditions[C]// Proceedings of the 2006 National Technical Meeting of the Institute of Navigation. Fort Worth: The Institute of Navigation, 2006: 735-747. [14] JIANG Y P, MILNER C, MACABIAU C. Code carrier divergence monitoring for dual-frequency GBAS[J]. GPS Solutions, 2017, 21(2): 769-781. doi: 10.1007/s10291-016-0567-4 [15] BAO Y D, LI J, LIU H N. Extraction and analysis of DCB daily variation based on single station dual-frequency observations[C]//Proceedings of the 9th China Satellite Navigation Academic Annual Conference. Berlin: Springer, 2018. [16] MA G, MARUYAMA T. Derivation of TEC and estimation of instrumental biases from GEONET in Japan[J]. Annales Geophysicae, 2003, 21(10): 2083-2093. doi: 10.5194/angeo-21-2083-2003 [17] HOLASCHUTZ D, BISHOP R H, HARRIS R B, et al. Inter-frequency bias estimation for the GPS monitor station network[C]// International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008). Savannah: The Institute of Navigation, 2008: 2405-2415. [18] LI Z S, YUAN Y B, LI H, et al. Two-step method for the determination of the differential code biases of COMPASS satellites[J]. Journal of Geodesy, 2012, 86(11): 1059-1076. doi: 10.1007/s00190-012-0565-4 [19] LIU Y H, LI X H, ZHANG H J, et al. Calculation and accuracy evaluation of TGD from IFB for BDS[J]. GPS Solutions, 2016, 20(3): 461-471. doi: 10.1007/s10291-015-0454-4 [20] MURPHY T, GEREN P, PANKASKIE T. GPS antenna group delay variation induced errors in a GNSS based precision approach and landing systems[C]// 20th International Technical Meeting of the Satellite Division. Fort Worth: The Institute of Navigation, 2007: 2974-2989. [21] BEER S, WANNINGER L, HEBELBANTH A. Estimation of absolute GNSS satellite antenna group delay variations based on those of absolute receiver antenna group delays[J]. GPS Solutions, 2021, 25(3): 1-10. [22] THOMAS Z. A new evaluation of maximum allowable errors and missed detection probabilities for LAAS ranging source monitors[C]// Proceedings of the 58th Annual Meeting of The Institute of Navigation and CIGTF 21st Guidance Test Symposium (2002). Fort Worth: The Institute of Navigation, 2002: 187-194. -


 下载:
下载:










 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 888
- HTML全文浏览量: 68
- PDF下载量: 14
- 被引次数: 0
