



-
摘要:
针对四旋翼无人机执行器常见故障,提出一种基于自适应技术和观测器的鲁棒故障检测和估计(FDE)方法。在故障检测阶段,设计非线性诊断观测器,通过解析函数推导出阈值,确保所提检测方法的鲁棒性,并对所设计的观测器和残差评估函数进行证明。在故障估计阶段,提出基于切换
ρ -修正的自适应律来准确估计检测到故障的方案。该方案不仅能够同时估计系统状态和残差信号,而且能估计未知故障的特征和大小。通过线性矩阵不等式进行设计参数的计算。利用2种故障场景分别进行仿真验证,同时在4种情况下讨论所提方法的有效性。基于四旋翼无人机硬件在环实验台验证了所提方法的可行性。Abstract:A fault detection and estimation(FDA) method based on adaptive technology and observer is designed for common actuator faults of quadrotor unmanned aerial vehicle. In the stage of fault detection, the nonlinear diagnostic observer is designed, and the threshold value is derived by analytic function to ensure the robustness of the proposed detection method. Moreover, the designed observer and residual evaluation function are proved. In the stage of fault estimation, an adaptive law based on switching
ρ -correction is proposed to accurately estimate the detected faults. This scheme can not only simultaneously estimate the system state and residual signal, but also estimate the characteristics and magnitude of unknown faults. The design parameters are calculated by linear matrix inequality method. The simulation results are verified in two fault scenarios, and the validity of the proposed method is discussed in four cases. The experimental results show the effectiveness of the proposed method by using the hardware-in-loop simulation of quadrotor unmanned aerial vehicle. -
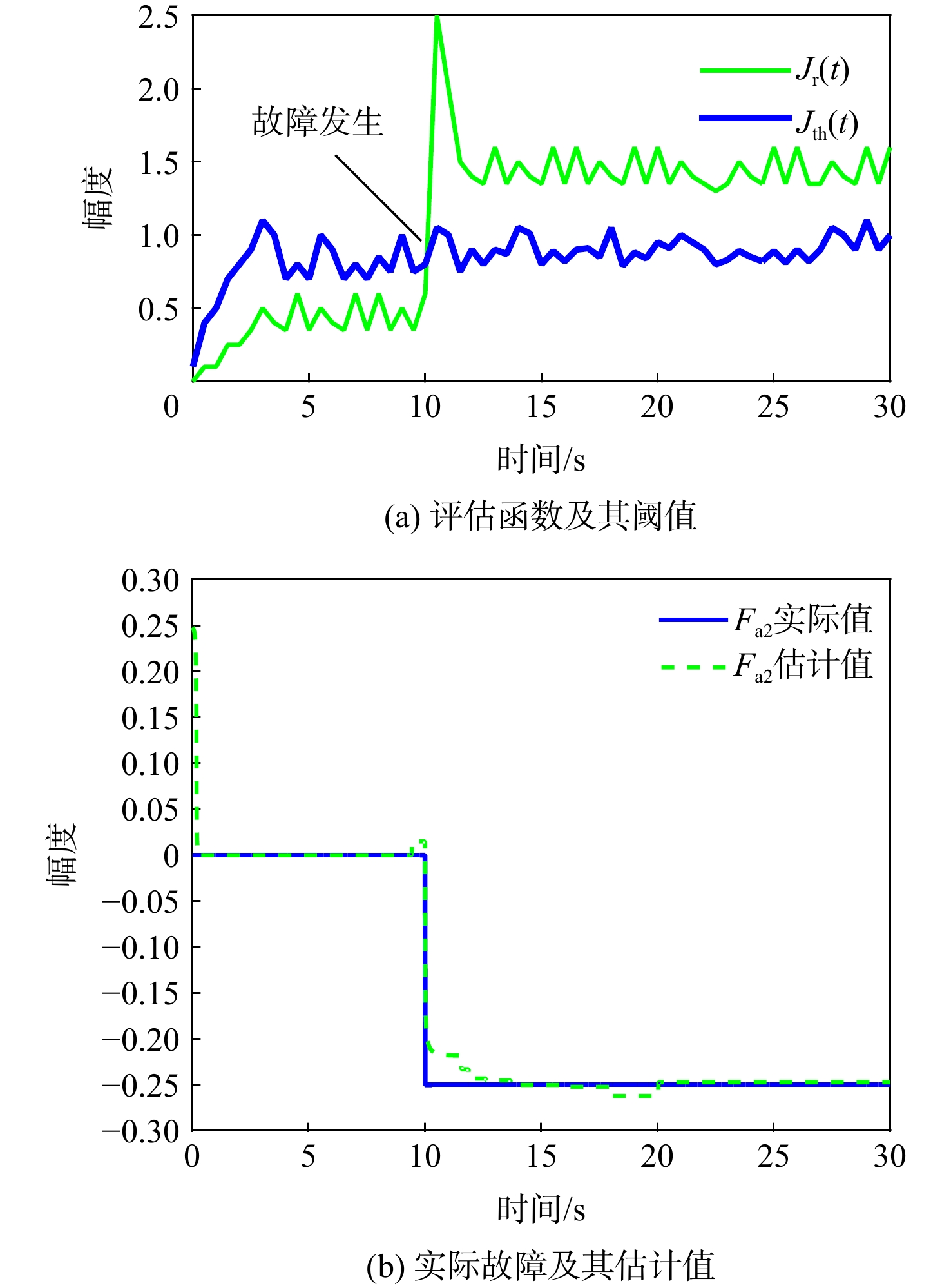
图 5 故障和模型不确定性存在情况下的方法验证
Figure 5. Scheme verification in the presence of fault and model uncertainties
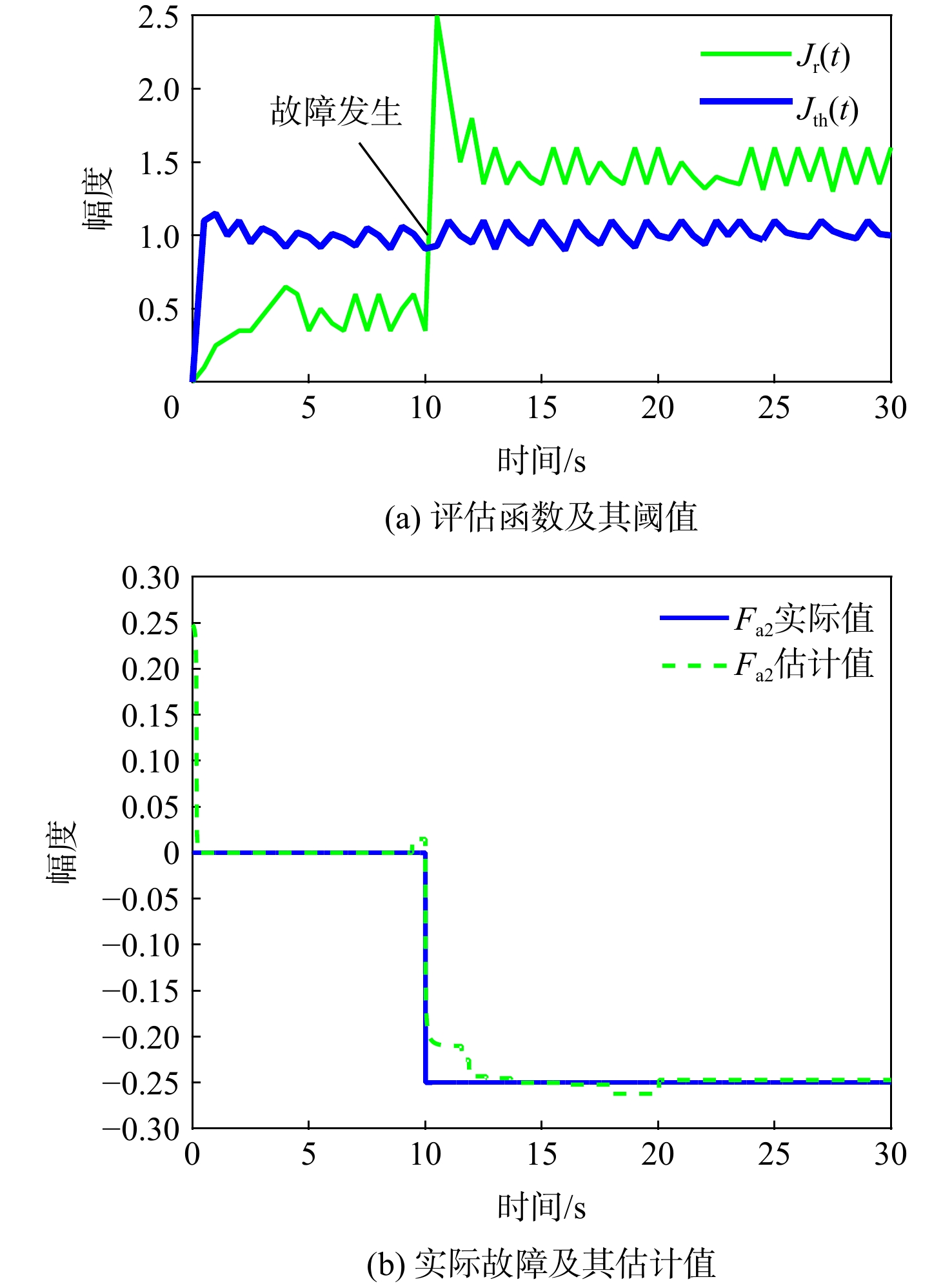
图 6 故障和测量不确定性存在情况下的方法验证
Figure 6. Scheme verification in the presence of fault and measurement uncertainty
-
[1] 全权. 多旋翼飞行器设计与控制[M]. 北京: 电子工业出版社, 2018: 70-85.QUAN Q. Design and control of multi-rotor aircraft[M]. Beijing: Publishing House of Electronics Industry Press, 2018: 70-85 (in Chinese). [2] ZHANG Y M, CHAMSEDDINE A, RABBATH C A, et al. Development of advanced FDD and FTC techniques with application to an unmanned quadrotor helicopter testbed[J]. Journal of the Franklin Institute, 2013, 350(9): 2396-2422. doi: 10.1016/j.jfranklin.2013.01.009 [3] 申富媛, 李炜. 四旋翼无人机执行器可重构性量化评价方法研究[J]. 北京航空航天大学学报, 2020, 46(11): 2077-2086.SHEN F Y, LI W. Quantitative reconfigurability evaluation method of actuator for quadrotor UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2077-2086(in Chinese). [4] 刘贞报, 马博迪, 高红岗, 等. 基于形态自适应网络的无人机目标跟踪方法[J]. 航空学报, 2021, 42(4): 524904.LIU Z B, MA B D, GAO H G, et al. Adaptive morphological network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524904(in Chinese). [5] AMOOZGAR M H, CHAMSEDDINE A, ZHANG Y M. Experimental test of a two-stage Kalman filter for actuator fault detection and diagnosis of an unmanned quadrotor helicopter[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1): 107-117. [6] 权璐, 姜斌, 杨蒲. 基于神经网络滑模观测器的飞控系统故障诊断[J]. 扬州大学学报(自然科学版), 2019, 22(2): 51-55.QUAN L, JIANG B, YANG P. Research on fault diagnosis algorithm of flight control system based on neural network sliding mode observer[J]. Journal of Yangzhou University (Natural Science Edition), 2019, 22(2): 51-55(in Chinese). [7] ZHANG K, JIANG B, SHI P. Fast fault estimation and accommodation for dynamical systems[J]. IET Control Theory & Applications, 2009, 3(2): 189-199. [8] 杨荟憭, 姜斌, 张柯. 四旋翼直升机姿态系统的直接自修复控制[J]. 控制理论与应用, 2014, 31(8): 1053-1060.YANG H L, JIANG B, ZHANG K. Direct self-repairing control for four-rotor helicopter attitude systems[J]. Control Theory & Applications, 2014, 31(8): 1053-1060(in Chinese). [9] AVRAM R C, ZHANG X D, MUSE J. Nonlinear adaptive fault-tolerant quadrotor altitude and attitude tracking with multiple actuator faults[J]. IEEE Transactions on Control Systems Technology, 2018, 26(2): 701-707. doi: 10.1109/TCST.2017.2670522 [10] FREEMAN P, PANDITA R, SRIVASTAVA N, et al. Model-based and data-driven fault detection performance for a small UAV[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4): 1300-1309. doi: 10.1109/TMECH.2013.2258678 [11] ZHANG J A, SWAIN A K, NGUANG S K. Robust sliding mode observer based fault estimation for certain class of uncertain nonlinear systems[J]. Asian Journal of Control, 2015, 17(4): 1296-1309. doi: 10.1002/asjc.987 [12] 王发威, 董新民, 陈勇, 等. 多操纵面飞机舵面损伤的快速故障诊断[J]. 航空学报, 2015, 36(7): 2350-2360.WANG F W, DONG X M, CHEN Y, et al. Fast fault diagnosis of multi-effectors aircraft with control surface damage[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(7): 2350-2360(in Chinese). [13] HAJIYEV C, SOKEN H E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults[J]. Aerospace Science and Technology, 2013, 28(1): 376-383. doi: 10.1016/j.ast.2012.12.003 [14] 李娟, 周东华, 司小胜, 等. 微小故障诊断方法综述[J]. 控制理论与应用, 2012, 29(12): 1517-1529.LI J, ZHOU D H, SI X S, et al. Review of incipient fault diagnosis methods[J]. Control Theory & Applications, 2012, 29(12): 1517-1529(in Chinese). [15] TAN C P, EDWARDS C. Sliding mode observers for detection and reconstruction of sensor faults[J]. Automatica, 2002, 38(10): 1815-1821. doi: 10.1016/S0005-1098(02)00098-5 [16] CEN Z H, NOURA H, SUSILO T B, et al. Robust fault diagnosis for quadrotor UAVs using adaptive thau observer[J]. Journal of Intelligent & Robotic Systems, 2014, 73(1): 573-588. [17] LIU C, JIANG B, ZHANG K. Incipient fault detection using an associated adaptive and sliding-mode observer for quadrotor helicopter attitude control systems[J]. Circuits Systems and Signal Processing, 2016, 35(10): 3555-3574. doi: 10.1007/s00034-015-0229-8 [18] CHEN W T, SAIF M. Unknown input observer design for a class of nonlinear systems: An LMI approach[C]//2006 American Control Conference. Piscataway: IEEE Press, 2006. [19] WU Y K, JIANG B, ZHOU D H, et al. ToMFIR-based detection and estimation for incipient actuator faults in a class of closed-loop nonlinear systems[J]. IFAC Proceedings Volumes, 2014, 47(3): 1096-1101. doi: 10.3182/20140824-6-ZA-1003.01095 [20] TANG Y, LI Y. Dynamic modeling for high-performance controller design of a UAV quadrotor[C]//IEEE International Conference on Information and Automation. Piscataway: IEEE Press, 2015: 3112-3117. [21] ZHANG K, JIANG B, YAN X G, et al. Incipient fault detection based on robust threshold generators: A sliding mode interval estimation approach[J]. IFAC-Papers, 2017, 50(1): 5067-5672. doi: 10.1016/j.ifacol.2017.08.953 [22] KE Y J, WANG K L, CHEN B M. Design and implementation of a hybrid UAV with model-based flight capabilities[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1114-1125. doi: 10.1109/TMECH.2018.2820222 [23] SUN C Y, YIN Y Z, MA H J. A dynamic fault detection method for nonlinear process[C]//2021 IEEE 10th Data Driven Control and Learning Systems Conference. Piscataway: IEEE Press, 2021: 108-113. [24] 尹艳辉, 王付永, 刘忠信, 等. 带有完全分布式观测器的多智能体系统自适应容错一致性[J]. 控制理论与应用, 2021, 38(7): 1082-1090.YIN Y H, WANG F Y, LIU Z X, et al. Fully distributed observer-based adaptive fault-tolerant consensus control for multi-agent systems[J]. Control Theory & Applications, 2021, 38(7): 1082-1090(in Chinese). [25] ZHANG J Q, REN Z H, DENG C, et al. Adaptive fuzzy global sliding mode control for trajectory tracking of quadrotor UAVs[J]. Nonlinear Dynamics, 2019, 97(1): 609-627. doi: 10.1007/s11071-019-05002-9 [26] EDWARDS C, TAN C P. A comparison of sliding mode and unknown input observers for fault reconstruction[J]. European Journal of Control, 2006, 12(3): 245-260. doi: 10.3166/ejc.12.245-260 [27] NIAN X H, CHEN W Q, CHU X Y, et al. Robust adaptive fault estimation and fault tolerant control for quadrotor attitude systems[J]. International Journal of Control, 2020, 93(3): 725-737. doi: 10.1080/00207179.2018.1484573 [28] AVRAM R C, ZHANG X D, MUSE J. Quadrotor actuator fault diagnosis and accommodation using nonlinear adaptive estimators[J]. IEEE Transactions on Control Systems Technology, 2017, 25(6): 2219-2226. doi: 10.1109/TCST.2016.2640941 [29] TANG Y R, LI Y M. Dynamic modeling for high-performance controller design of a UAV quadrotor[C]//2015 IEEE International Conference on Information and Automation. Piscataway: IEEE Press, 2015: 3112-3117. [30] DING S X. Model-based fault diagnosis techniques: Design schemes, algorithms and tools[M]. Berlin: Springer, 2013: 80-152. -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 1374
- HTML全文浏览量: 129
- PDF下载量: 100
- 被引次数: 0
