



-
摘要:
针对尾座式无人机在垂直起降(VTOL)阶段对风干扰敏感的问题,提出了一种基于
L 1-ITD的尾座式无人机姿态控制方法。建立了垂直起降阶段尾座式无人机六自由度非线性模型,设计了基于L 1自适应的无人机姿态控制器,可抑制扰动对系统性能的影响,实现垂直起降阶段存在风干扰和模型不确定时对无人机姿态的良好控制。在此基础上,针对L 1自适应控制方法对量测噪声敏感及无法直接获取有效微分信号的问题,引入改进跟踪微分器,在快速精确跟踪信号的同时抑制了量测噪声的影响。仿真结果验证了所提方法的有效性。Abstract:Aiming at the problem that the tail-sitter UAV is sensitive to wind disturbance in the vertical take-off and landing (VTOL) stage, an attitude control law based on
L 1-ITD is proposed. Firstly, a 6-DOF nonlinear model of a tail-sitter UAV in VTOL stage is established, and anL 1 adaptive attitude controller for the UAV is designed. The controller can suppress the influence of disturbance on system performance and achieve good attitude control performance with wind disturbance and model uncertainty in VTOL stage. Then, aiming at the problem thatL 1 adaptive control method is sensitive to measurement noise and cannot directly obtain effective differential signal, an improved tracking differentiator is used to track the signal quickly and accurately while suppressing the influence of measurement noise. Finally, the simulation results demonstrate the effectiveness of the proposed control method.-
Key words:
- L1 adaptive control /
- tracking differentiator /
- tail-sitter UAV /
- attitude control /
- measurement noise
-

图 4 分段常值风干扰下L1自适应控制与PID控制效果对比曲线
Figure 4. Under segmented constant wind disturbance comparison curves between L1 adaptive control and PID control
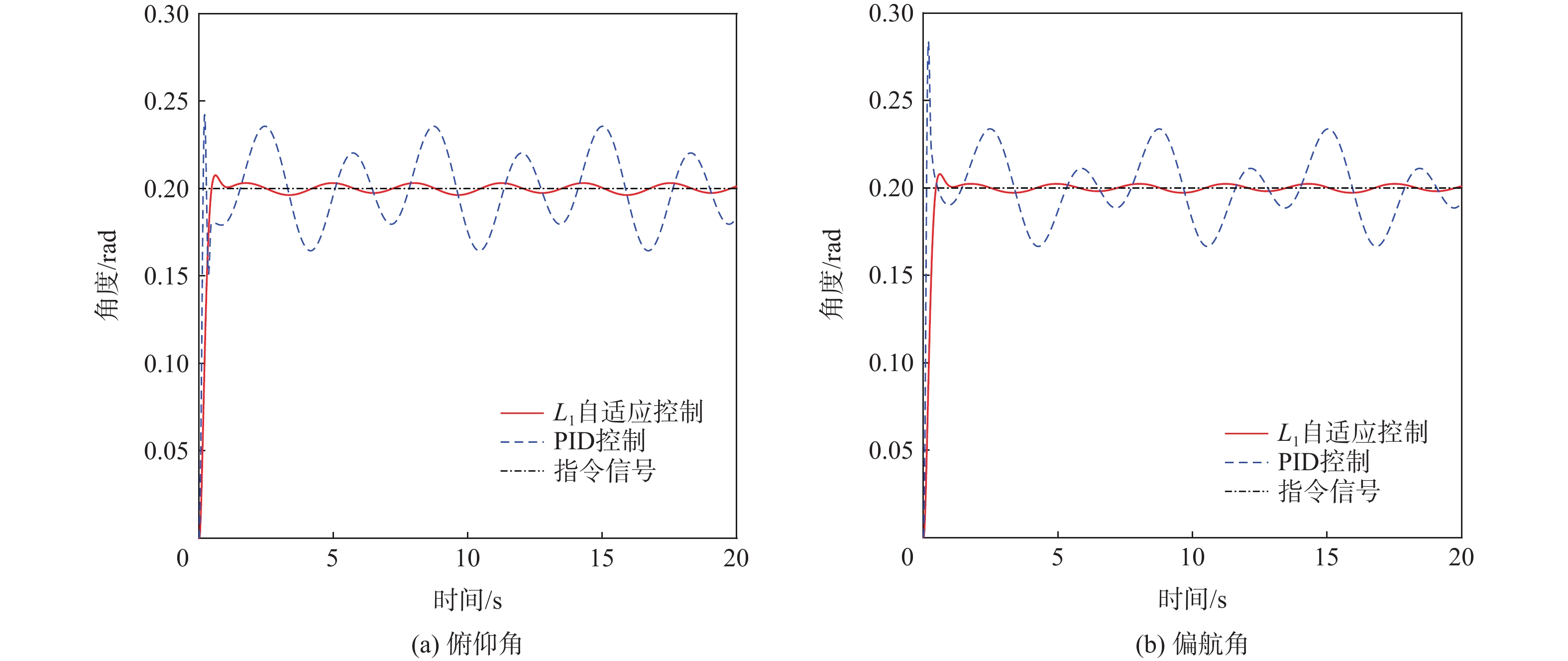
图 5 正弦高频风干扰下L1自适应控制与PID控制效果对比曲线
Figure 5. Under sinusoidal high-frequency wind disturbance comparison curves between L1 adaptive control and PID control
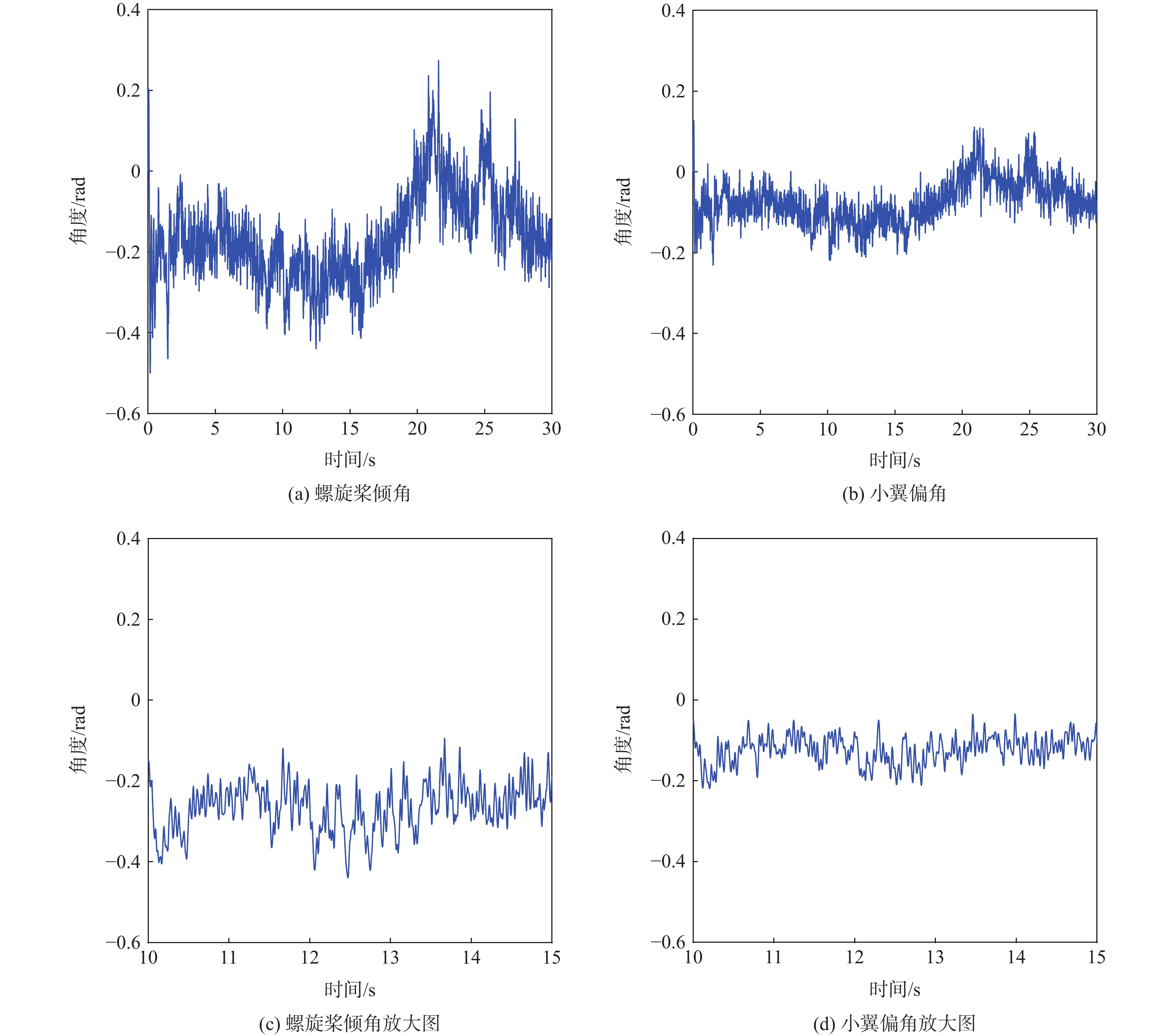
图 7 加入量测噪声后L1自适应控制方法效果曲线
Figure 7. L1 adaptive control curve after adding measurement noise
-
[1] 刘玉焘. 尾座式无人机的飞行控制器设计[D]. 哈尔滨: 哈尔滨工业大学, 2014: 1-33.LIU Y T. Design of flight controller for a tail-sitter UAV[D]. Harbin: Harbin Institute of Technology, 2014: 1-33(in Chinese). [2] 王刚强. 大气扰动下无人直升机悬停/小速度段位置控制律设计[D]. 南京: 南京航空航天大学, 2013: 1-3.WANG G Q. Research on position control technology of the unmanned helicopter in hover and low speed state with atmospheric disturbance[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013: 1-3(in Chinese). [3] 王正熙, 陈洋, 郑秀娟, 等. 风扰下基于气动参数估计的四旋翼无人机控制[J]. 信息与控制, 2018, 47(6): 663-670. doi: 10.13976/j.cnki.xk.2018.7490WANG Z X, CHEN Y, ZHENG X J, et al. Quadrotor UAV control with disturbance based on aerodynamic parameter estimation[J]. Information and Control, 2018, 47(6): 663-670(in Chinese). doi: 10.13976/j.cnki.xk.2018.7490 [4] KIM M, KIM Y. Error dynamics-based guidance law of UAVs for target observation under wind disturbance: AIAA 2012-2593[R]. Reston: AIAA, 2012. [5] WASLANDER S, WANG C. Wind disturbance estimation and rejection for quadrotor position control: AIAA 2009-1983[R]. Reston: AIAA, 2009. [6] WANG Y N, YU J L, LI Q D, et al. Control strategy for the transition flight of a tail-sitter UAV[C]//2017 Chinese Control Conference. Piscataway: IEEE Press, 2017: 3504-3509. [7] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23. doi: 10.3321/j.issn:1001-0920.1998.01.005HAN J Q. Auto-disturbances-rejection controller and it’s applications[J]. Control and Decision, 1998, 13(1): 19-23(in Chinese). doi: 10.3321/j.issn:1001-0920.1998.01.005 [8] WANG Q Q, XIONG H J, QIU B. The attitude control of transmission line fault inspection UAV based on ADRC[C]//2017 International Conference on Industrial Informatics-Computing Technology, Intelligent Technology, Industrial Information Integration. Piscataway: IEEE Press, 2018: 186-189. [9] ZHU G J, QI J T, WU C. Landing control of fixed-wing UAV based on ADRC[C]//2019 Chinese Control Conference. Piscataway: IEEE Press, 2019: 8020-8025. [10] LEE D, AWAN A, KIM S, et al. Adaptive control for a VTOL UAV operating near a wall: AIAA 2012-4835[R]. Reston: AIAA, 2012. [11] LIAN S K, MENG W, LIN Z M, et al. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1597-1607. doi: 10.1109/TIE.2021.3057015 [12] CAO C Y, HOVAKIMYAN N. Guaranteed transient performance with L1 adaptive controller for systems with unknown time-varying parameters and bounded disturbances: Part I[C]//2007 American Control Conference. Piscataway: IEEE Press, 2007: 3925-3930. [13] LUO J, CAO C, HOVAKIMYAN N. L1 adaptive controller for a class of systems with unknown nonlinearities[C]//2010 American Control Conference. Piscataway: IEEE Press, 2010: 1659-1664. [14] CAO C, HOVAKIMYAN N. L1 adaptive controller for nonlinear systems in the presence of unmodelled dynamics: Part II[C]//2008 American Control Conference. Piscataway: IEEE Press, 2008: 4099-4104. [15] 秦奇. 飞行器纵向轨迹的L1自适应控制[D]. 北京: 北京理工大学, 2015: 1-39.QIN Q. L1 adaptive control for aircraft longitudinal trajectory[D]. Beijing: Beijing Institute of Technology, 2015: 1-39(in Chinese). [16] 陈海, 何开锋, 钱炜祺. 基于非线性L1自适应动态逆的飞行器姿态角控制[J]. 控制理论与应用, 2016, 33(8): 1111-1118. doi: 10.7641/CTA.2016.51007CHEN H, HE K F, QIAN W Q. Attitude control of flight vehicle based on a nonlinear L1 adaptive dynamic inversion approach[J]. Control Theory & Applications, 2016, 33(8): 1111-1118(in Chinese). doi: 10.7641/CTA.2016.51007 [17] ZHONG J Y, SONG B F, LI Y B, et al. L1 adaptive control of a dual-rotor tail-sitter unmanned aerial vehicle with input constraints during hover flight[J]. IEEE Access, 2019, 7: 51312-51328. doi: 10.1109/ACCESS.2019.2911897 [18] 甄红涛, 齐晓慧, 李杰, 等. 四旋翼无人机L1自适应块控反步姿态控制器设计[J]. 控制与决策, 2014, 29(6): 1076-1082.ZHEN H T, QI X H, LI J, et al. Quadrotor UAV L1 adaptive block backstepping attitude controller[J]. Control and Decision, 2014, 29(6): 1076-1082(in Chinese). [19] 韩京清, 王伟. 非线性跟踪-微分器[J]. 系统科学与数学, 1994, 14(2): 177-183.HAN J Q, WANG W. Nonlinear tracking-differentiator[J]. Journal of Systems Science and Mathematical Sciences, 1994, 14(2): 177-183(in Chinese). [20] 史永丽, 侯朝桢. 改进的非线性跟踪微分器设计[J]. 控制与决策, 2008, 23(6): 647-650. doi: 10.13195/j.cd.2008.06.49.shiyl.005SHI Y L, HOU C Z. Design of improved nonlinear tracking differentiator[J]. Control and Decision, 2008, 23(6): 647-650(in Chinese). doi: 10.13195/j.cd.2008.06.49.shiyl.005 [21] 刘延泉, 郭佳颖. 双曲正切跟踪微分器设计及相平面分析[J]. 电力科学与工程, 2017, 33(10): 74-78. doi: 10.3969/j.ISSN.1672-0792.2017.10.013LIU Y Q, GUO J Y. Design and phase plane analysis of a hyperbolic tangent tracking differentiator[J]. Electric Power Science and Engineering, 2017, 33(10): 74-78(in Chinese). doi: 10.3969/j.ISSN.1672-0792.2017.10.013 [22] 王新华, 陈增强, 袁著祉. 全程快速非线性跟踪-微分器[J]. 控制理论与应用, 2003, 20(6): 875-878.WANG X H, CHEN Z Q, YUAN Z Z. Nonlinear tracking-differentiator with high speed in whole course[J]. Control Theory & Applications, 2003, 20(6): 875-878(in Chinese). [23] 刘海亭. 基于滑模变结构控制的机械臂轨迹跟踪[D]. 天津: 天津大学, 2018.LIU H T. Trajectory tracking of robotic manipulators based on sliding mode variable structure control[D]. Tianjin: Tianjing University, 2018(in Chinese). [24] KE Y J, WANG K L, CHEN B M. Design and implementation of a hybrid UAV with model-based flight capabilities[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1114-1125. doi: 10.1109/TMECH.2018.2820222 [25] LIU X X, LI Y, YUAN M Q, et al. Gust alleviation controller for elastic aircraft based on L1 adaptive control[C]//2017 Chinese Automation Congress. Piscataway: IEEE Press, 2018: 5382-5385. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 1564
- HTML全文浏览量: 102
- PDF下载量: 39
- 被引次数: 0
