



-
摘要:
针对混合翼身融合布局面临的三轴运动耦合和大迎角失稳等潜在操稳问题,研制三自由度虚拟飞行试验系统,基于动力学相似模型开展纵向和横航向开环虚拟飞行试验,对飞机的本体操稳特性进行研究。结果表明:该混合翼身融合布局飞机纵向和航向开环操纵均存在三轴运动耦合现象。纵向操纵会引起大迎角极限环失稳现象,迎角振荡平衡位置约为28°、振荡幅值约为2.56°、振荡主频率为0.55 Hz,振荡过程中气动力呈现非定常特性;V型尾翼偏航操纵响应呈现横向运动幅值最大、偏航运动次之、俯仰运动最小的特点。
Abstract:A three-degree-of-freedom wind tunnel virtual flight test system was created in an effort to address the possible stability issues of three-axis kinematic coupling and high angle-of-attack instability presented by the hybrid wing-body aircraft. Based on the dynamic similarity model, longitudinal and transverse open-loop virtual flight tests were carried out to study the stability characteristics of the aircraft. The research results show that there is a three-axis motion coupling phenomenon in both the longitudinal and directional open-loop manipulation of the hybrid wing-body aircraft. Longitudinal manipulation will cause the instability of the limit cycle at high angles of attack. The equilibrium position of oscillation is about 28°, the oscillation amplitude is about 2.56°, and the main oscillation frequency is 0.55 Hz. The aerodynamic force presents unsteady characteristics during the oscillation process; The lateral motion amplitude of the yaw manipulation is the largest, followed by yaw motion and pitch motion.
-
混合翼身融合布局融合了常规布局与翼身融合体的特点,机身前半部中央体与机翼融合一体,后部分机身保持圆形与尾翼连接。该布局形式作为未来商用飞机的潜在构型之一,具有气动效率高、噪声低、排放少等优点。不仅如此,此种布局延长了机身后体增加控制力臂,提升尾部操纵面的控制效率,有利于解决纵向和航向的操稳问题[1]。
混合翼身融合布局延续了翼身融合布局高升阻比等气动特性的同时,也存在运动失稳、操纵面带来的运动耦合等潜在的操稳问题,有必要对其操稳特性进行更为准确的评估和预测[2]。
风洞虚拟飞行试验技术是一种约束线运动放开角运动的风洞飞行试验,通过人为操纵或控制程序进行各种科目飞行试验,并实时记录飞行数据,是开展飞行器操稳特性与飞行控制研究的重要试验手段之一[3-4]。世界主要航空大国基于虚拟飞行试验平台开展了操稳特性相关研究。英国克兰菲尔德大学和布里斯托大学基于虚拟飞行试验平台开展飞机动稳定性和控制特性的研究[5-6]。英国布里斯托大学Lowenberg项目团队在1.1 m量级开口风洞开展0.6 m展长BAE Hawk模型单自由度和双自由度俯仰运动研究,发现非线性极限环振荡现象,并采用动态增益策略对试验模型进行俯仰反馈控制,改善了其整个试验迎角区间的动态响应特性[7],近年来该项目团队基于五自由度运动机构对非线性迎角区间的横航向偏离特性进行研究[8]。文献[9]在俄罗斯中央流体动力学研究院低速风洞中开展大迎角机翼摇滚及尾旋特性研究,验证纵向及横航向增稳系统的控制效果。文献[10]在单自由度机构上对飞翼布局飞机航向控制增稳特性进行研究。
国内虚拟飞行试验技术从2010年起陆续开展相关研究工作。中国空气动力研究与发展中心基于开发的虚拟飞行试验平台先后开展尾旋特性研究[11]、飞机结冰动力学特性与自适应控制[12]、倾转旋翼飞机悬停/前飞过渡过程飞行控制验证[13]及飞翼布局飞机先进飞机控制技术验证[14]等研究工作。航天空气动力技术研究院开展了类F-16飞行器的虚拟飞行试验,测量到大迎角俯仰失稳和负迎角横航向失稳等非定常试验现象[15]。南京航空航天大学在NH-2低速风洞中开发了虚拟飞行试验系统,并针对翼身融合布局的偏离特性开展虚拟飞行验证试验[16-17]。综上所述,国内外研究机构应用虚拟飞行试验平台针对常规布局、飞翼布局和翼身融合布局等飞行器开展了操稳特性研究,取得了一定的研究成果。然而,从现有文献来看,采用风洞虚拟飞行试验研究混合翼身融合布局飞机面临的操稳特性问题鲜有报道。
本文针对混合翼身融合布局的潜在操稳问题,基于4 m量级的动力学相似模型开展三自由度开环虚拟飞行试验,并对飞机本体的俯仰极限环振荡和三轴耦合运动现象进行分析,为混合翼身融合布局气动优化和控制律设计提供一定参考。
1. 混合翼身融合布局民机
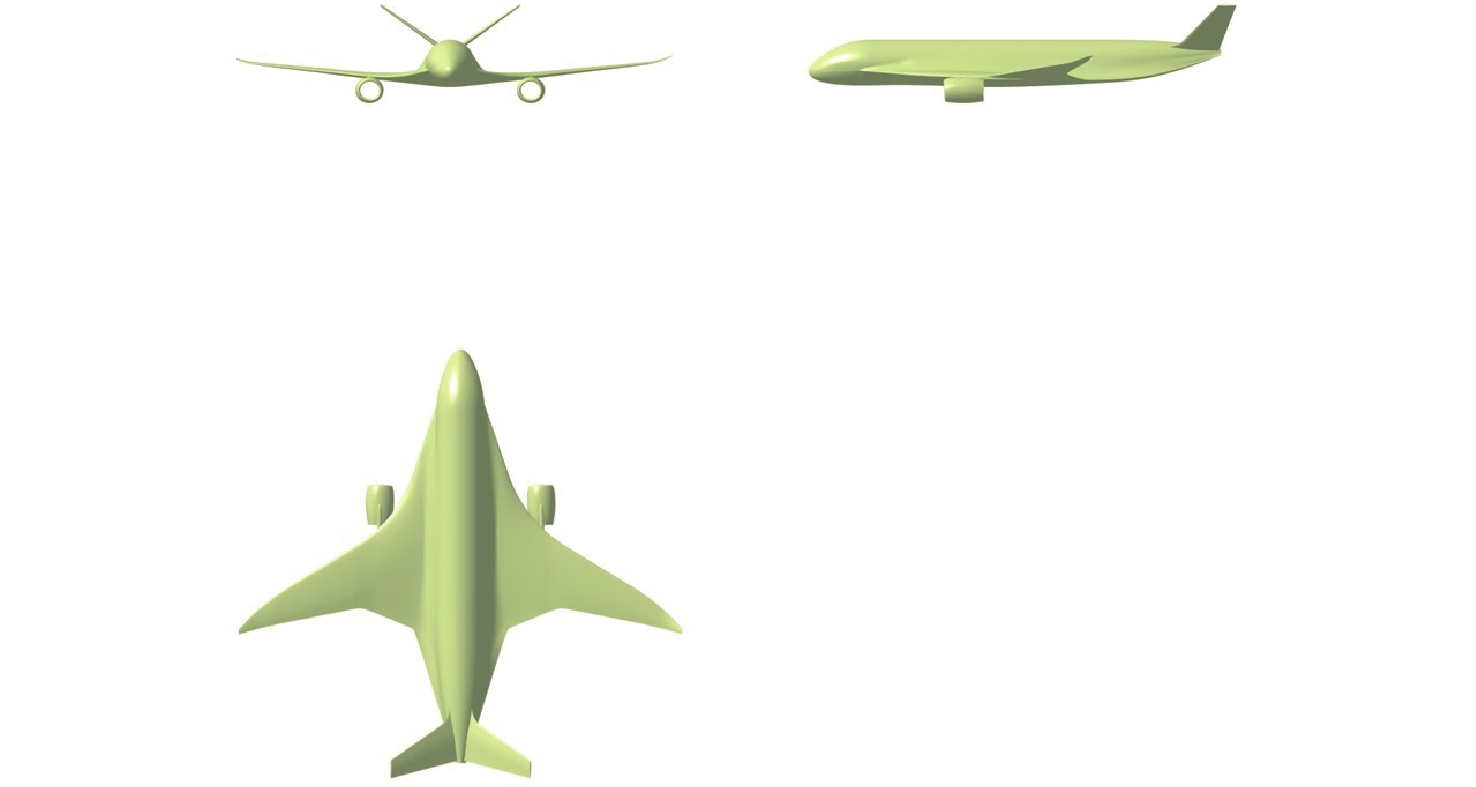
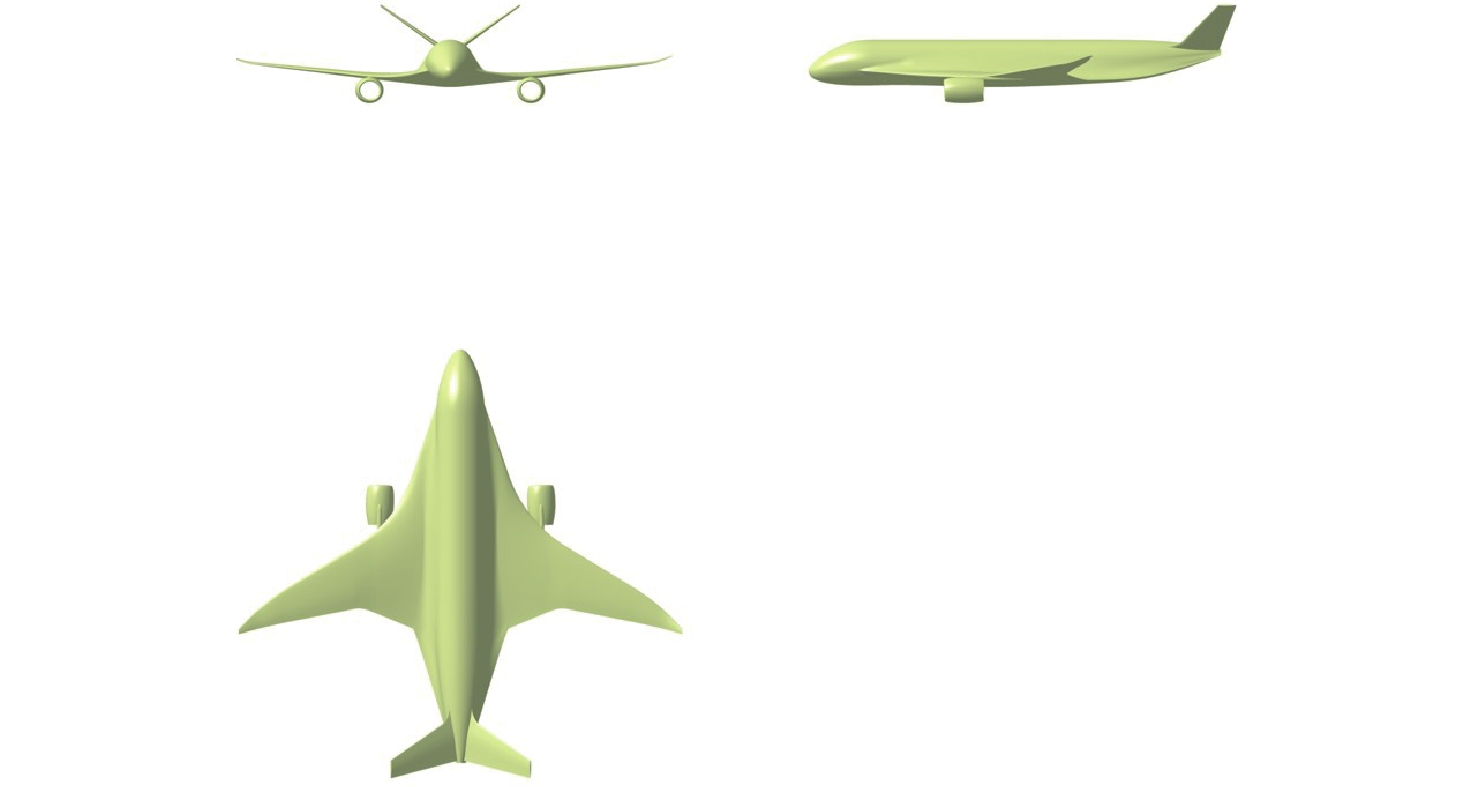
混合翼身融合民机采用下单翼前缘延伸大边条、中度翼身融合、V型尾翼(以下简称“V尾”)和翼吊双发的布局特征,如图1所示,几何参数如表1所示。
表 1 混合翼身融合布局民机几何参数Table 1. Geometric parameters of hybrid wing body civil aircraft机翼面积S/m2 展长L/m 平均气动弦长c/m 参考中心与机头距离/m 26.802 36 10.413 14.445 2. 静态测力试验
为了解该混合翼身融合布局民机的气动特性,在FL-51风洞中进行静态测力试验,如图2所示,模型缩比为1/15。
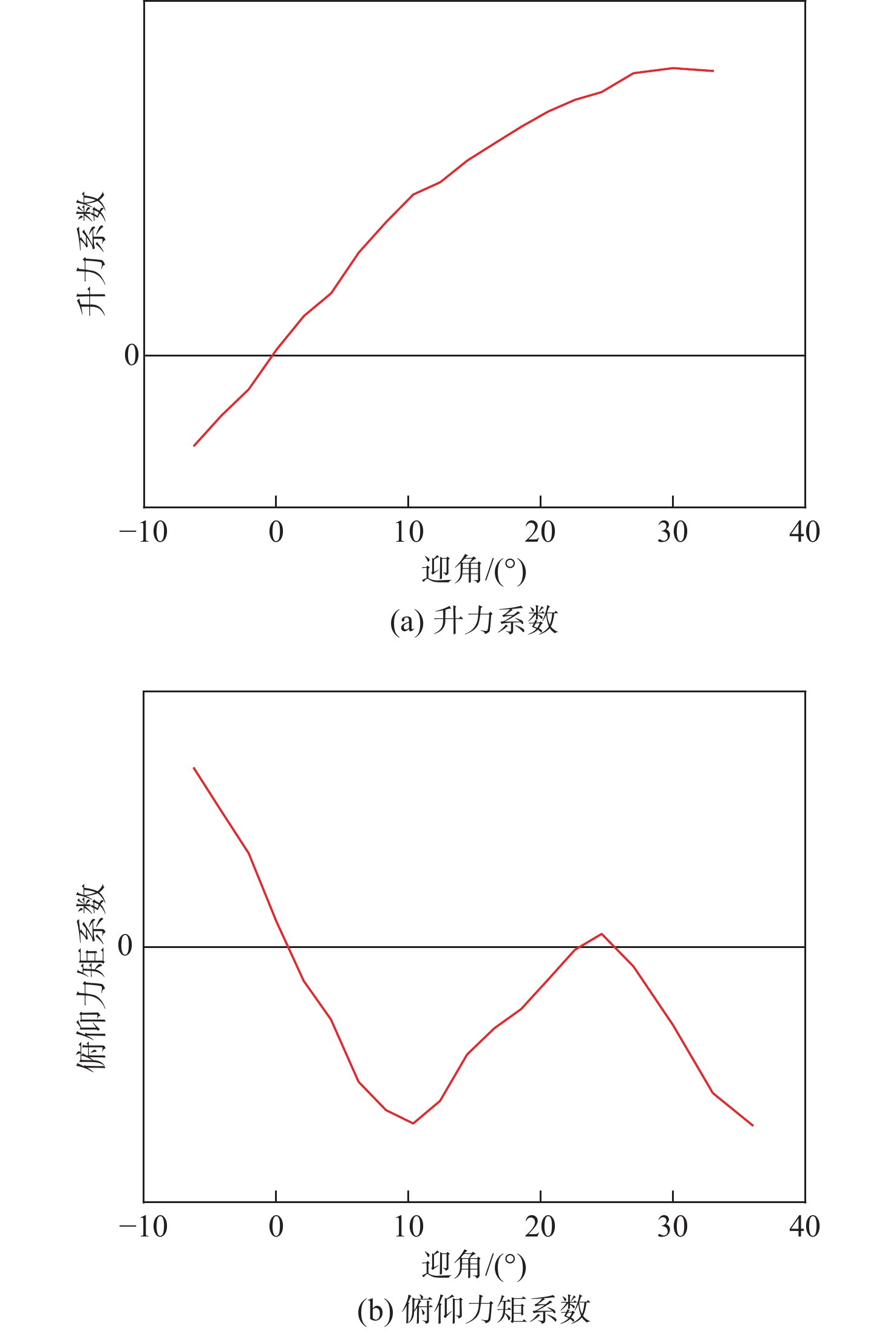
图3为零侧滑(侧滑角β=0°)下飞机升力系数和俯仰力矩系数的纵向静态测力试验结果,从图3(b)可知飞机迎角在−5°~10°范围内是俯仰静稳定的,在10°~25°范围内,转为静不稳定。原因主要为飞机布局形式为大边条翼和翼身融合的组合导致气动焦点随迎角增加前移、纵向稳定性减小,而迎角大于25°,飞机又重新进入静稳定状态。
 图 3 纵向静态测力试验结果(β=0°)Figure 3. Longitudinal static force wind tunnel test results(β=0°)
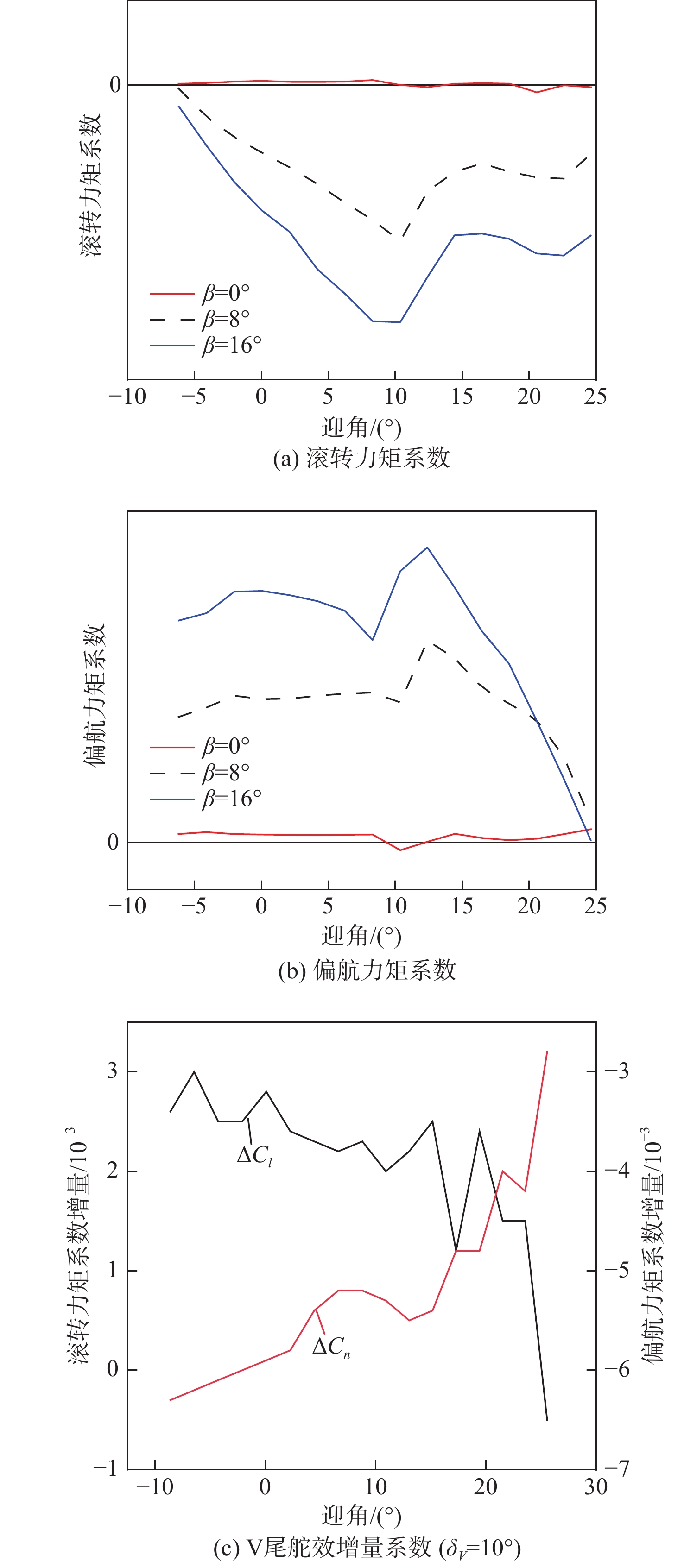
图 3 纵向静态测力试验结果(β=0°)Figure 3. Longitudinal static force wind tunnel test results(β=0°)图4 为横航向静态测力试验结果,图4(a)和图4(b)结果表明:该飞机迎角在−5°~25°,侧滑角在0°~16°范围内具有横向静稳定性;迎角在−5°~20°,侧滑角β在0°~16°范围内具有航向静稳定性。
图4(c)为零侧滑下V尾舵面偏转10°带来的横航向气动增量,为了表明舵面偏转带来的操纵特性,根据动力学方程推演得到计算式为
k=|ΔClIx⋅IzΔCn| (1) 式中:ΔCl为滚转力矩系数增量;ΔCn为偏航力矩系数增量;Ix、Iz分别为x、z轴惯性矩;k为滚转与偏航响应速度等效比例因子。经计算可知迎角在0°~10°时,k值均大于1,即V尾偏转不仅会带来飞机的偏航运动,还伴有滚转运动,且滚转运动响应速度高于偏航运动,表明V尾带来的偏航滚转耦合较强。
3. 虚拟飞行试验方法
3.1 相似准则与模拟方法
相似准则是虚拟飞行试验的理论基础,为了使试验结果能反映全尺寸飞机的稳定与控制特性,虚拟飞行试验必须在满足相似准则的状态下开展。根据动力学方程和流动方程,动力学相似参数和流动相似参数可经推导得到。动力学相似参数主要包括几何相似、质量相似、惯量相似;流动相似参数主要包括斯特劳哈尔数、弗劳德数、雷诺数和马赫数。虚拟飞行试验中除了几何相似,弗劳德数(Fr)是必须满足的相似准则,对应的参数相似关系如表2所示[18],表中:V为飞行速度,l为飞机特征线性尺寸,m为飞机质量,J为转动惯量,g为重力加速度,ρ为空气密度,N为缩比模型与全尺寸飞机的特征长度之比。
3.2 虚拟飞行试验系统
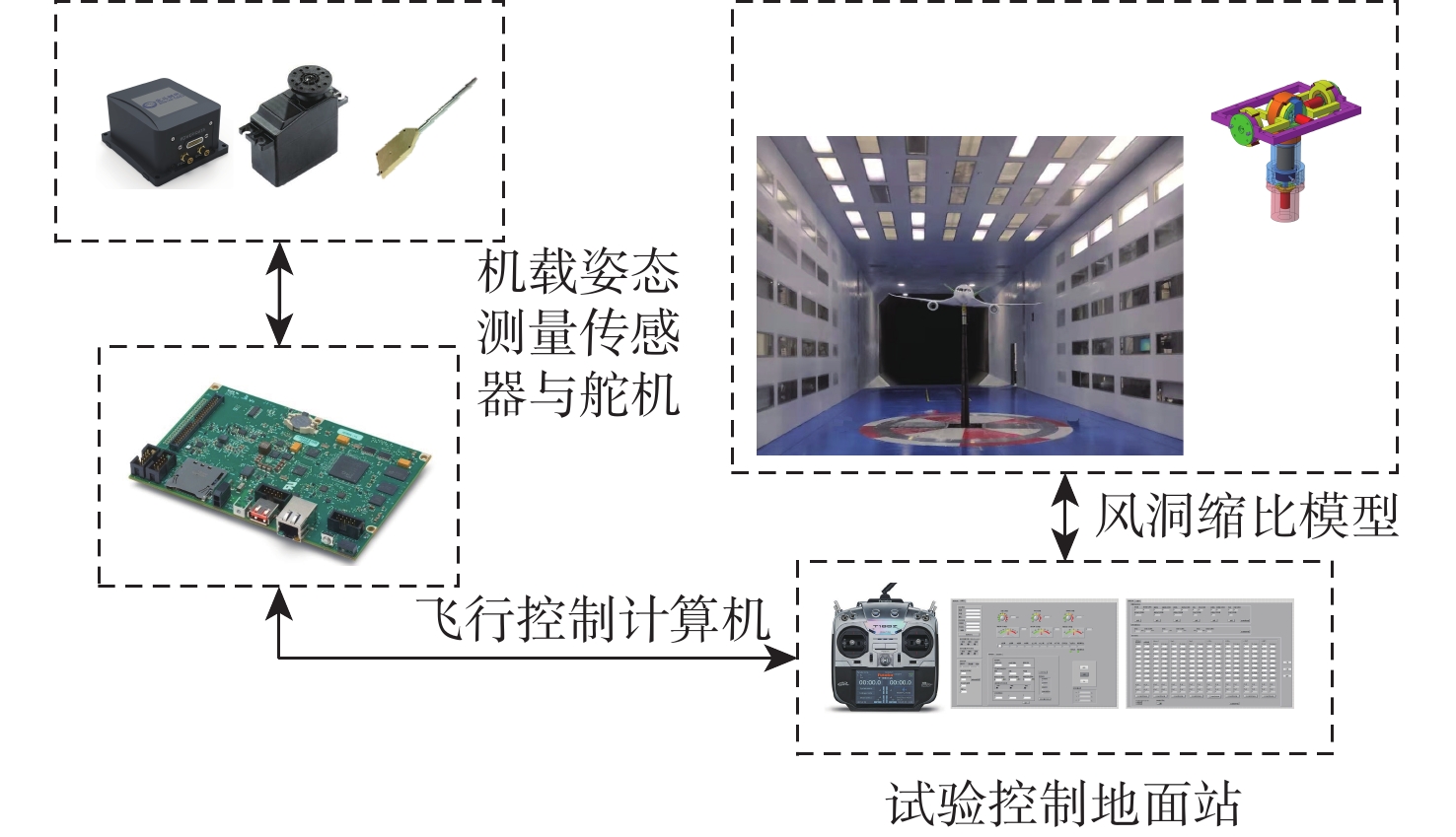
混合翼身融合布局民机虚拟飞行试验在8 m量级FL-10闭口风洞中进行。该风洞闭口试验段截面尺寸为8 m×6 m,长度为20 m,空风洞最大风速为110 m/s[19],虚拟飞行试验模型的缩比为1/9。
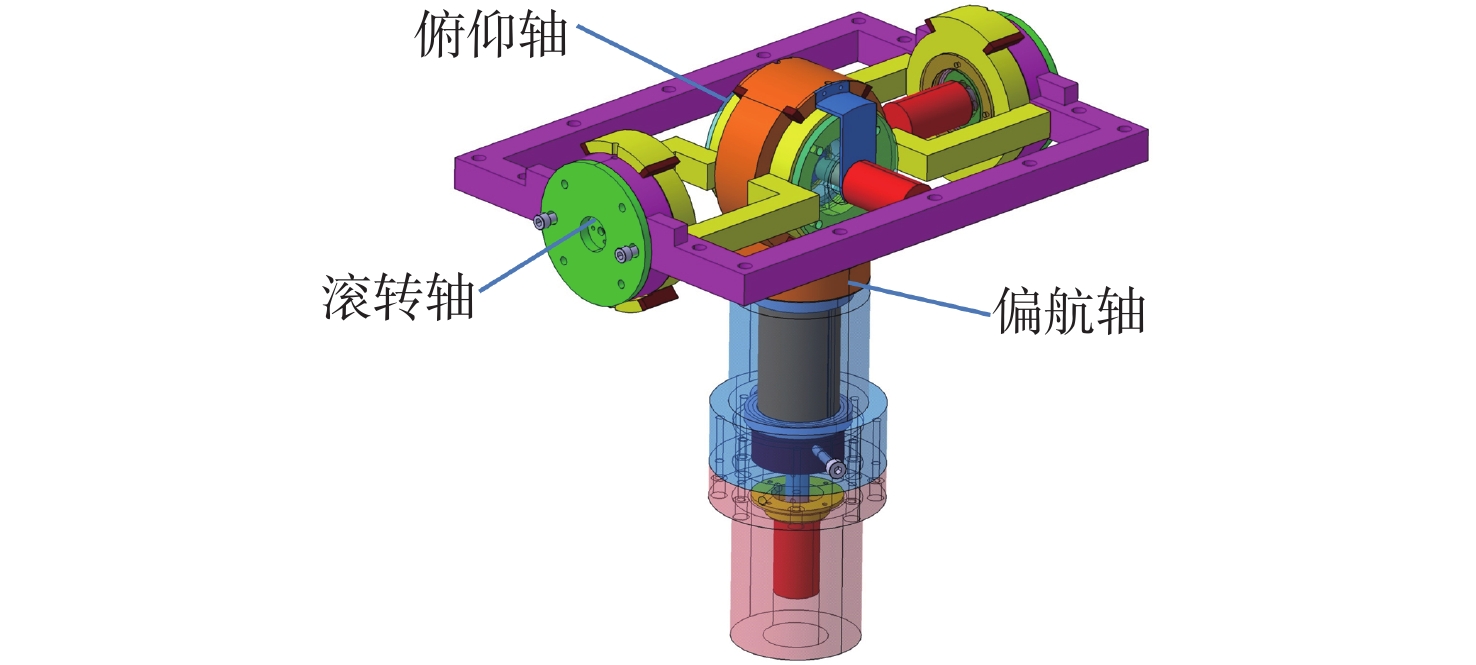
图5为试验模型在风洞中的安装状态。缩比模型通过低阻尼三自由度转动机构(见图6)与腹撑支杆相连接,并安装于风洞试验段中。三自由度转动机构将模型的线位移约束,具有3个角运动自由度,其中滚转角运动范围为±45°、俯仰角运动范围为±45°、偏航角运动范围为±180°。
虚拟飞行试验系统示意图如图7所示,缩比模型内部装有机载姿态测量传感器、飞行控制律计算机和驱动操纵面偏转的舵机。机载姿态测量传感器用于测量飞机运动参数,飞行控制计算机采集机载姿态测量传感器的数据,运行控制律算法,通过舵面控制缩比模型的姿态。试验控制地面站可以实时显示试验过程中的相关数据,包括迎角、侧滑角、姿态角和角速度及舵面实时信息,同时地面站可以发出典型激励指令。
4. 典型风洞试验结果分析
针对该混合翼身融合民机存在的潜在操稳问题,分别开展纵向和横航向开环虚拟飞行试验,试验风速范围为20~42 m/s。试验过程中,横向指令对应副翼偏转;左、右V尾作为升降舵和方向舵的共同操纵面,其中左、右V尾同时向下偏转视为升降舵正向偏转,左V尾向下偏转、右V尾向上偏转视为方向舵正向偏转。
4.1 三轴耦合运动特性
为了评估该民机的三轴耦合运动特性,以下试验均采用三轴开环控制方式。
4.1.1 俯仰操纵特性
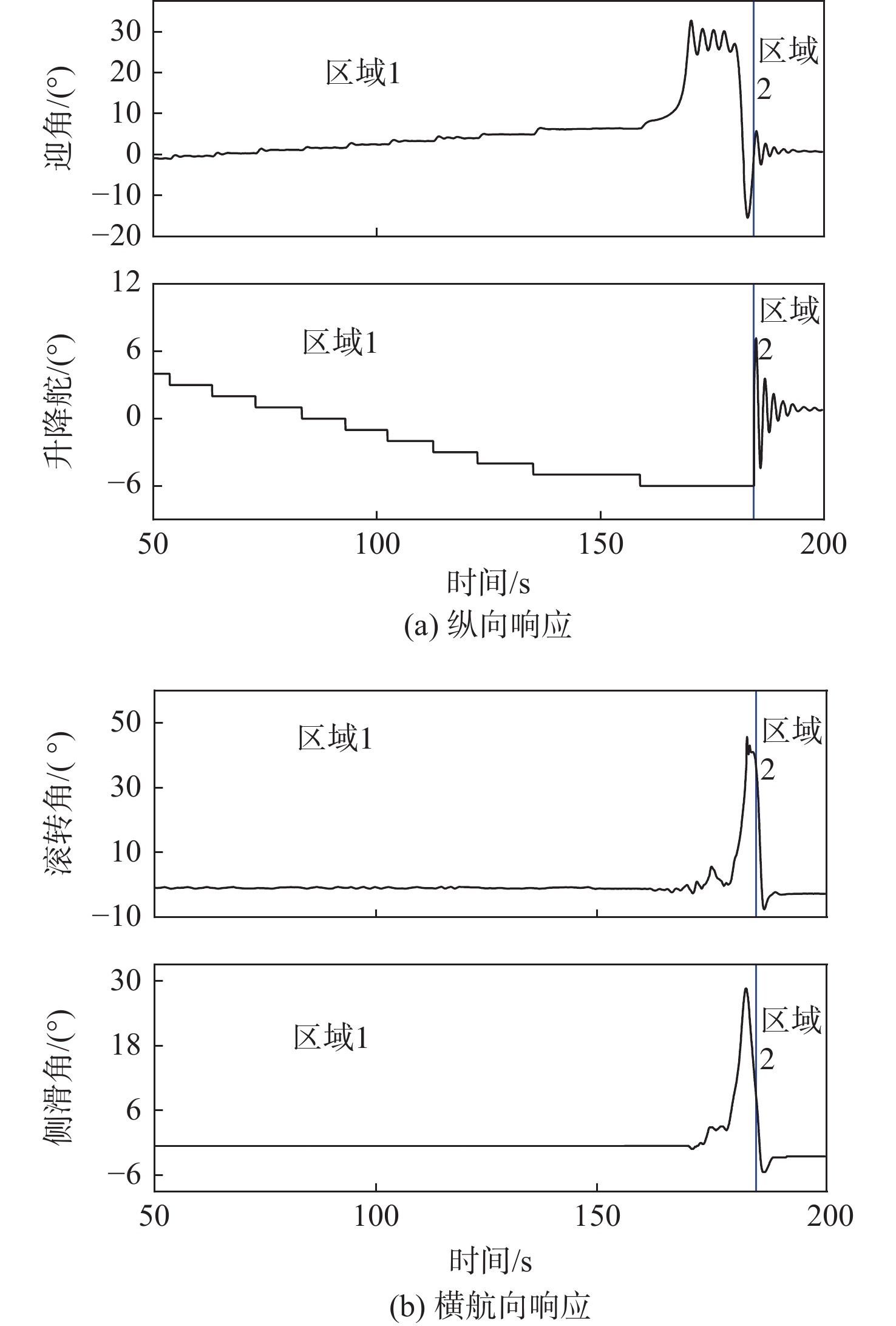
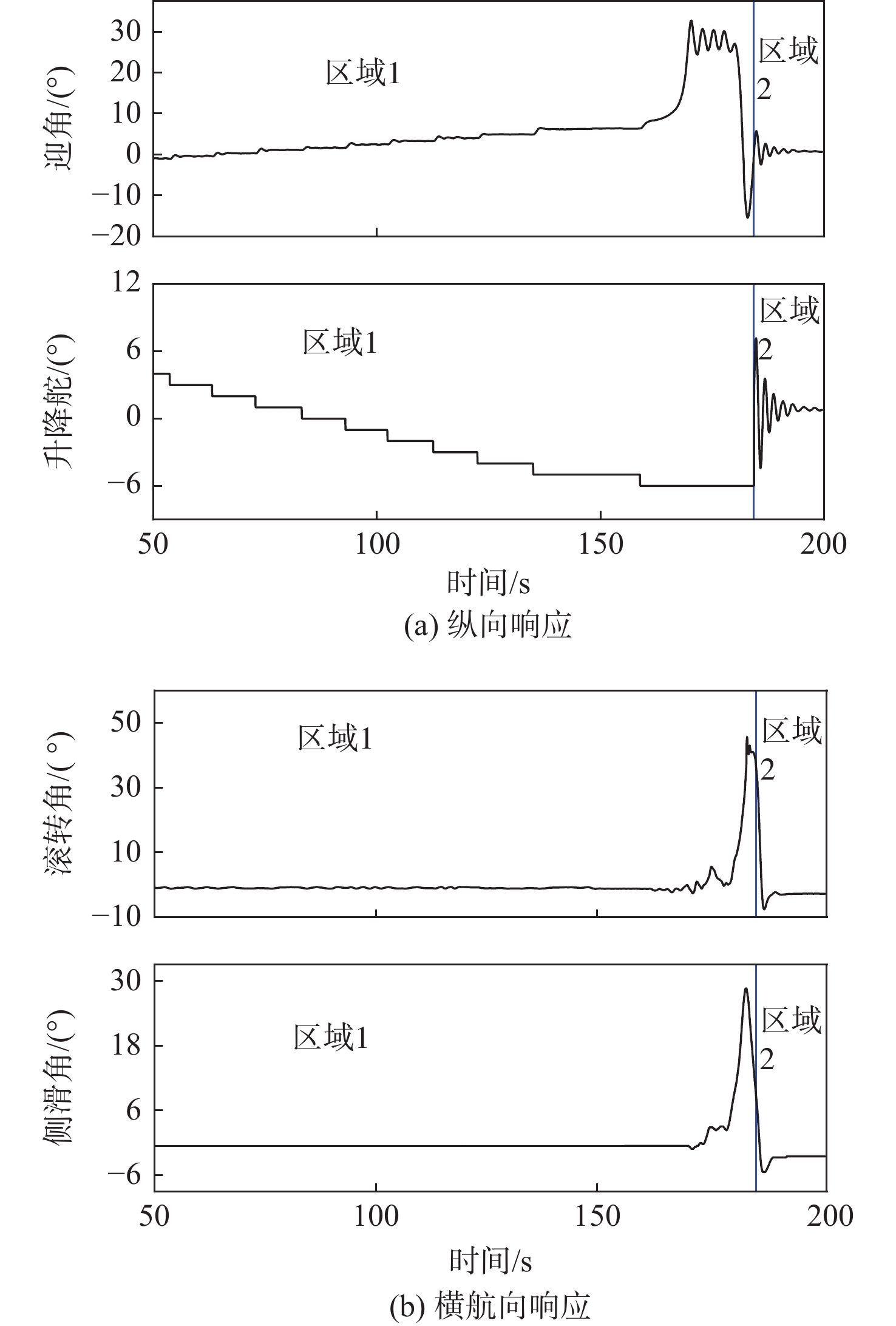
操纵模型升降舵从8°到−6°间隔2°连续变化,相应的平衡迎角变化范围为−3°~33°。试验过程中响应曲线如图8所示。图8(a)为迎角和升降舵的响应曲线,当升降舵从8°间隔变化到−4°时,迎角均振荡衰减至平衡位置,而当升降舵为−6°时,迎角迅速增大,出现连续振荡现象,振荡平衡位置约为28°。改变升降舵至0°,迎角振荡消除。
 图 8 纵向操纵三轴开环响应结果Figure 8. Three-axis open-loop responses results of longitudinal control
图 8 纵向操纵三轴开环响应结果Figure 8. Three-axis open-loop responses results of longitudinal control图8(b)为纵向操纵过程中横航向运动响应曲线。可以看出,迎角迅速增大进入振荡的过程中,伴随着滚转偏离运动和大幅度侧滑角振荡。此现象表明在大迎角非线性运动区域,该民机纵向操纵会带来横航向的运动,三轴耦合特性较强。
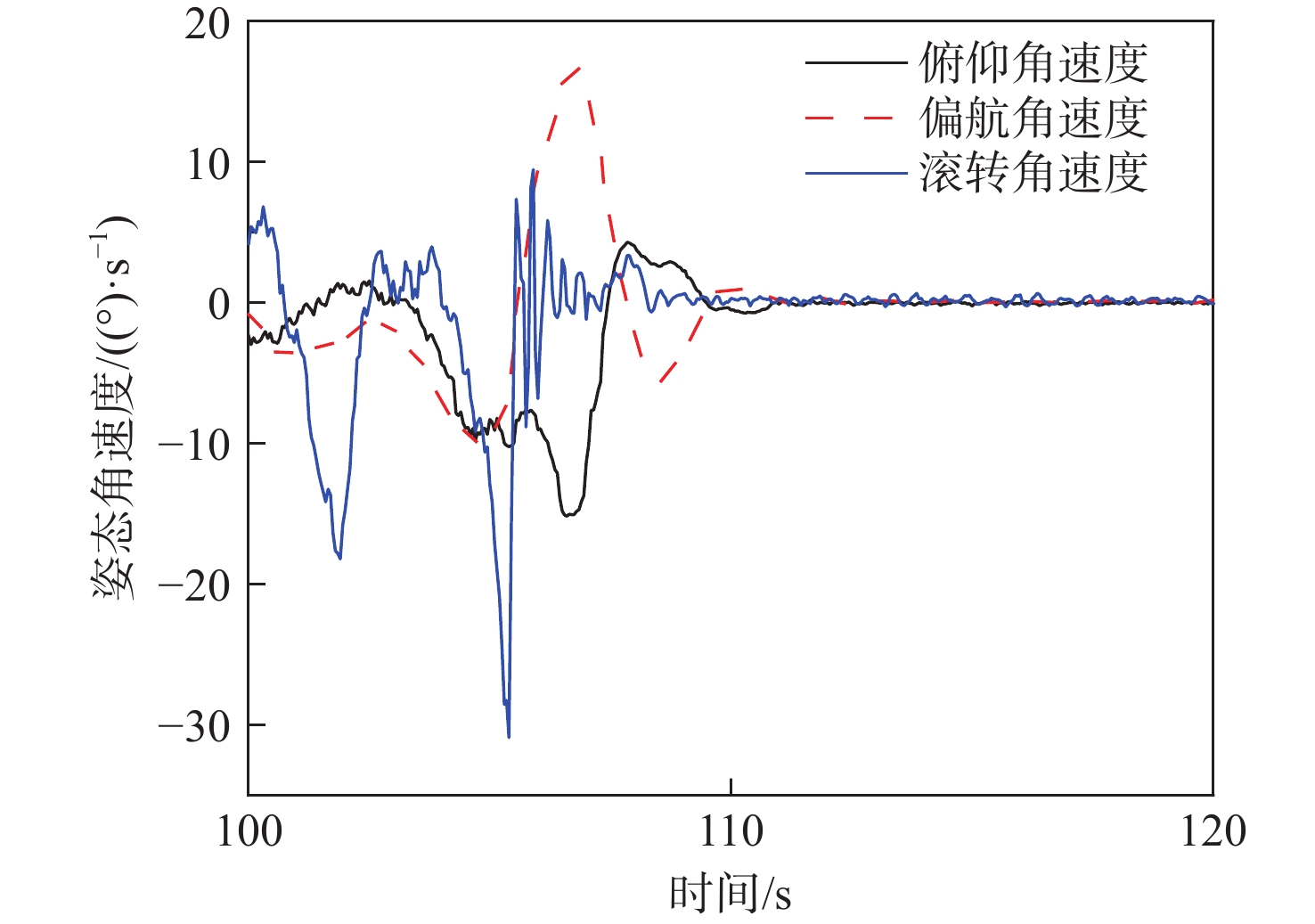
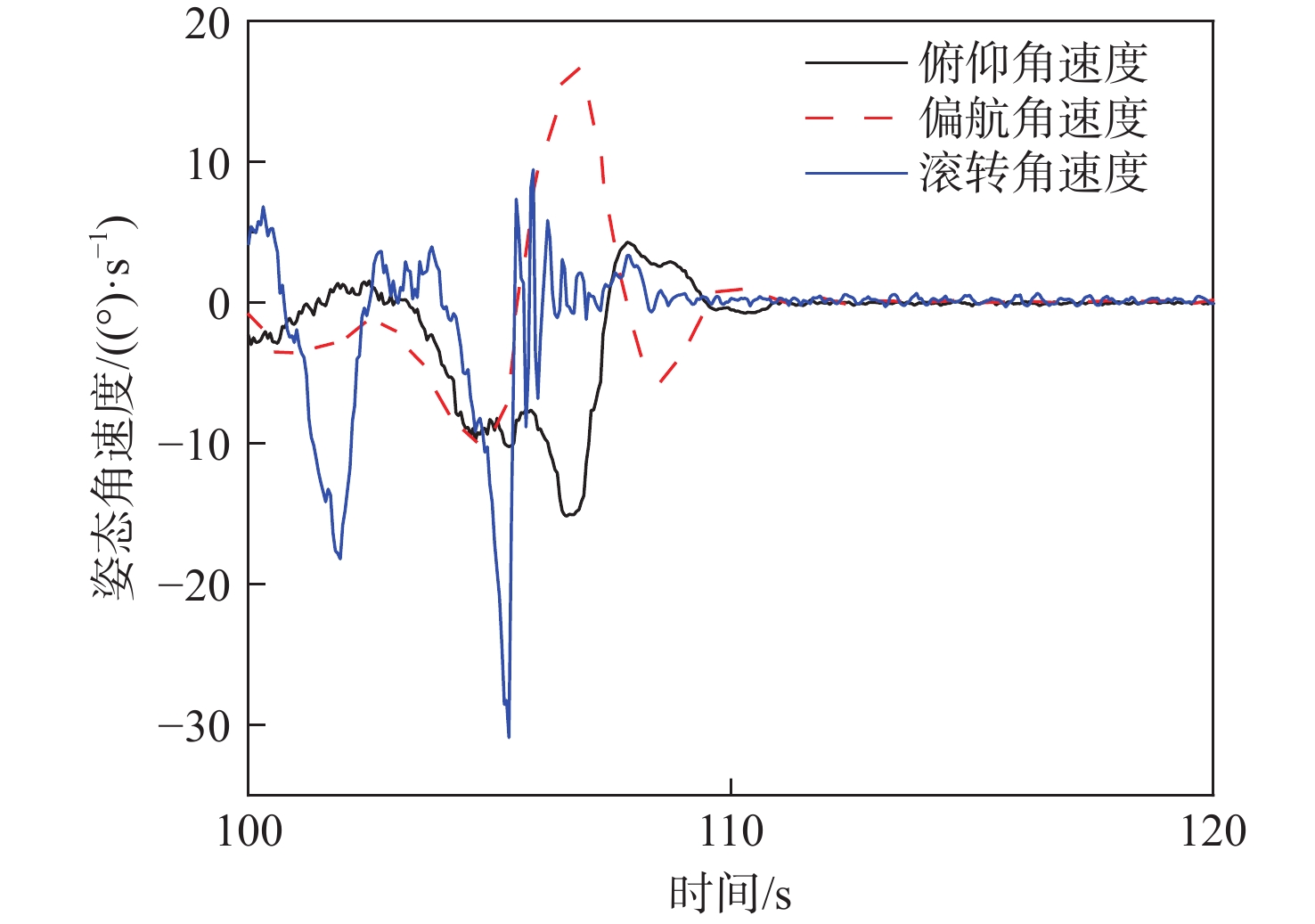
图8(b)中显示升降舵恢复至0°后(图8中蓝色实线后区域),滚转角ϕ仍然持续偏离,最终稳定至−40°附近。为了解释这一持续偏离现象,图9给出滚转角持续运动过程中的三轴姿态角速度时间历程曲线。结合图8和图9结果,分析滚转角偏离原因为:在侧滑角不断增加的过程中(见图8(b)),该民机由于横向静稳定性会产生负向滚转力矩与负向滚转角速度(图9中蓝色实线),在已有的负滚转角的基础上滚转运动持续同方向(负向)偏离。
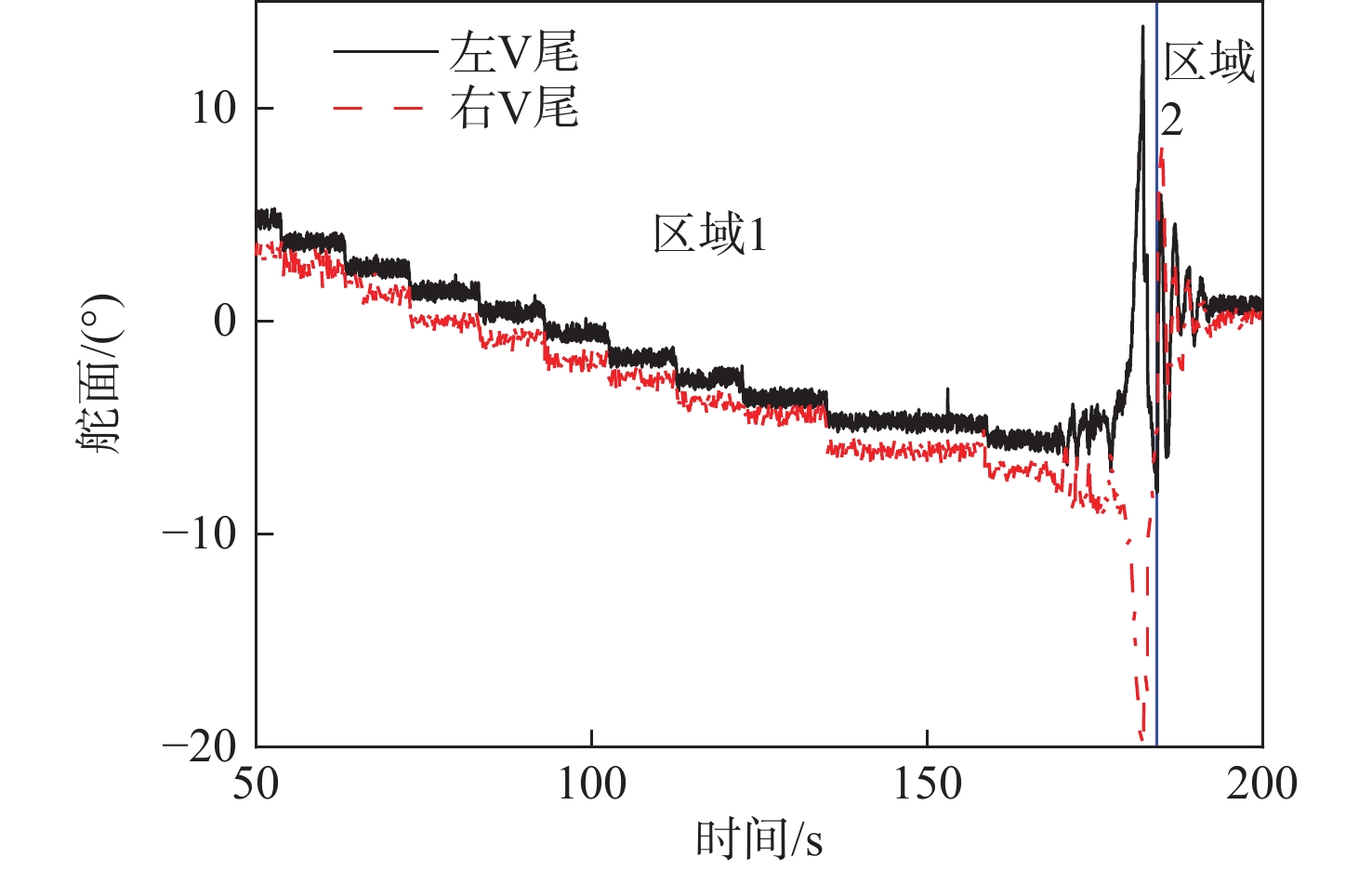
为了消除上述大迎角三轴耦合运动,开展控制增稳措施研究。首先,保持俯仰开环控制方式,偏航、滚转采用经典比例-积分-微分(proportional integral derivative, PID)控制进行零度保持。升降舵同样为2°间隔连续变化,迎角响应曲线如图10中区域1所示。可以看出,升降舵为−6°时,迎角出现连续振荡现象,并仍伴有滚转角和侧滑角的大幅度改变,分析原因为横航向控制增益效果不足,无法完全抑制横航向耦合运动。
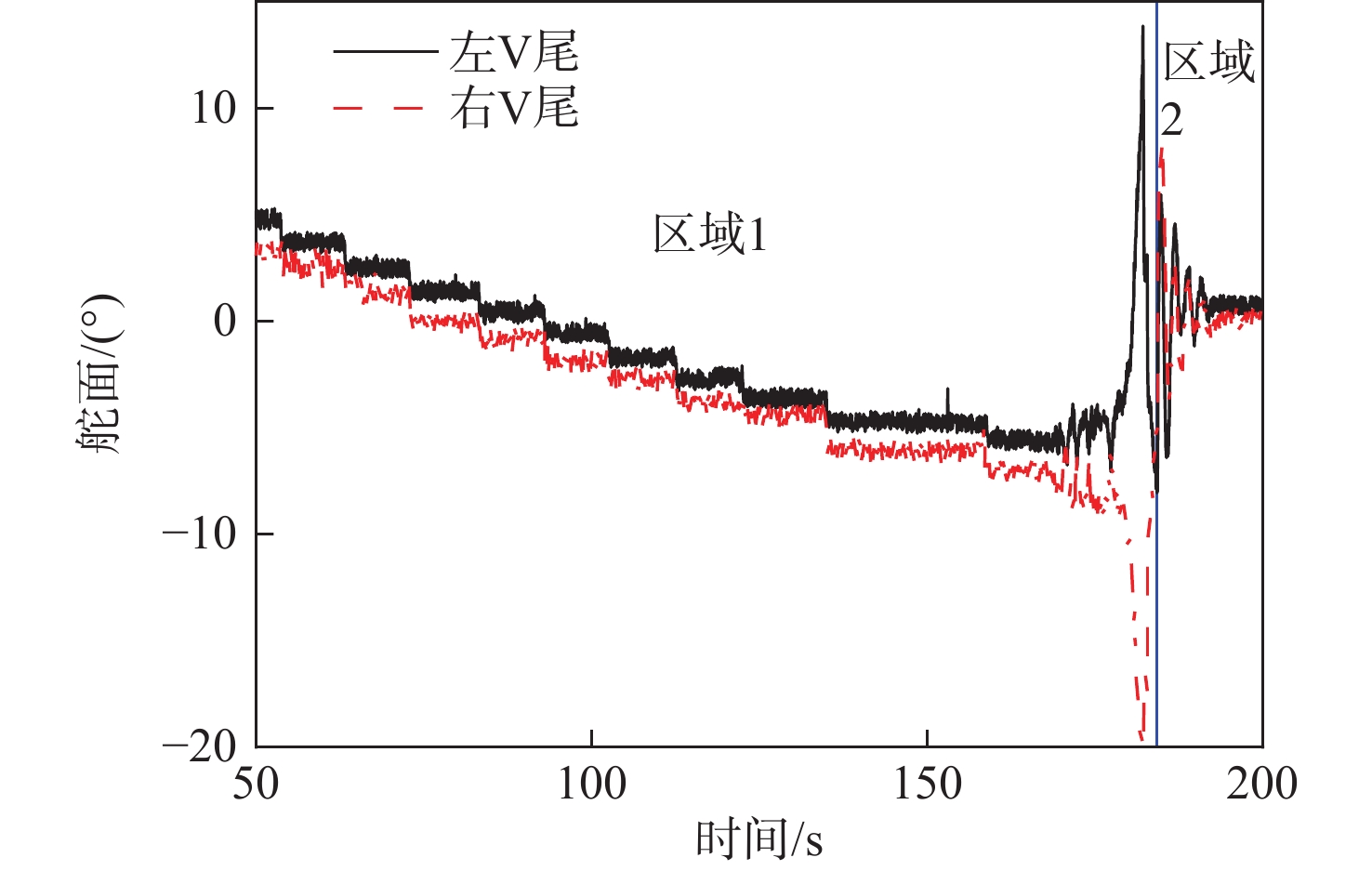
同时,图10区域1中反映了另一种运动现象即:不进行外部操纵输入,迎角在振荡一段时间后会自行迅速降低。为分析此现象成因,图11给出左、右V尾舵机编码器实时测量结果。可以看出,为了控制滚转角和侧滑角为0°,横航向闭环控制解算的左、右V尾舵面产生较大偏转,由于V尾共同控制俯仰和偏航运动,升降舵量值也随之改变,导致迎角大幅下降。此种现象再次说明V尾操纵带来的俯仰和偏航耦合运动较为明显,在设计控制增稳措施时要着重考虑。
进一步,不改变横航向控制增益,对俯仰运动实施闭环控制(图10中区域2),迎角、侧滑角和滚转角均振荡衰减至0°,试验停止。
4.1.2 偏航操纵特性
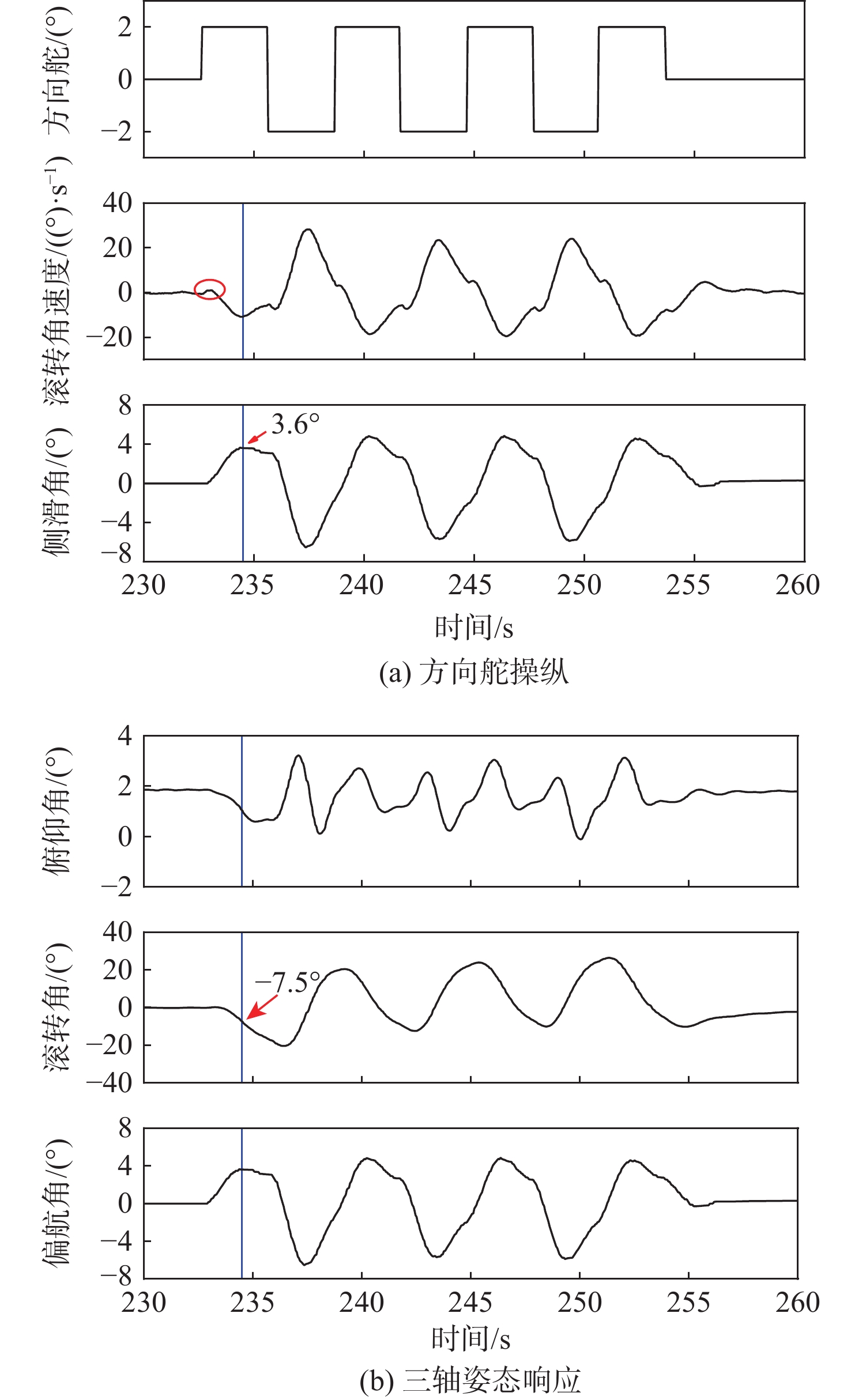
针对V尾偏航操纵带来的运动耦合问题,对方向舵采用连续方波激励,幅值为±2°。三轴姿态角响应曲线如图12所示,运动历程结果表明方向舵偏转后飞机呈现明显的三轴耦合状态,响应特性呈现滚转角运动幅度最大、偏航角次之、俯仰角最小的特点,其中滚转角运动范围为±20°,而偏航角运动范围为±6°,此现象与第2节中的静态舵效试验分析结果一致。
图11中蓝色实线显示滚转角偏转幅值大于侧滑角,分析原因为:方向舵操纵产生的偏航操纵力矩产生较大的侧滑角(如图12(a)中第3条曲线),横向稳定性使得飞机产生较大的滚转力矩和滚转角速度,从而产生较大的滚转角。
由飞机运动特性可知,方向舵正向偏转产生正向侧滑运动,同时带来负向滚转运动。但图12(a)中红色虚线显示,方向舵正向偏转带来了小幅度的正向滚转角速度,即引起了非单调操纵响应。分析原因为:V尾力矩作用点位于机身上方较高位置,方向舵正向偏转会产生正向滚转力矩,从而引起短时间内的滚转角速度正向变化。
4.2 俯仰大迎角失稳特性
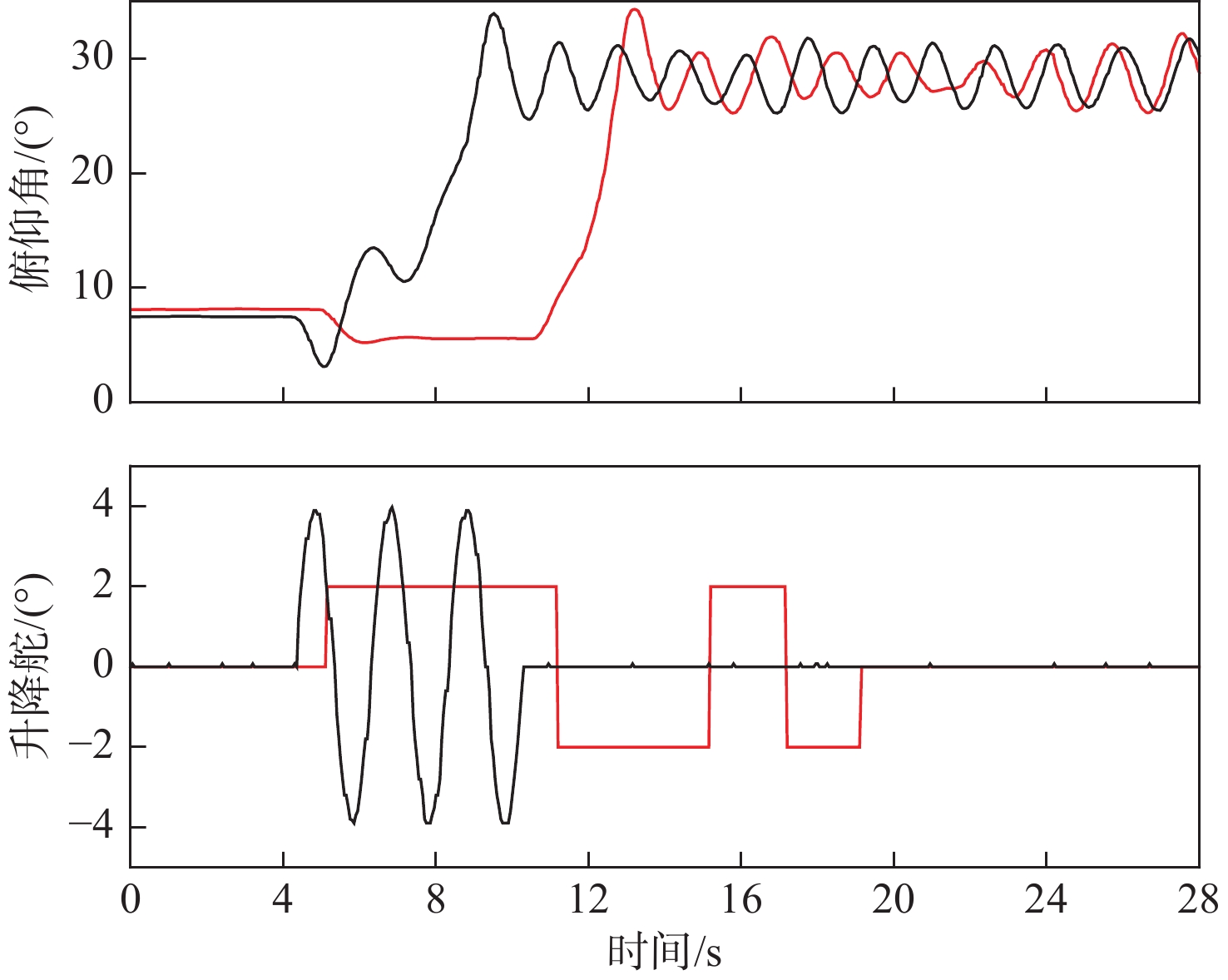
针对纵向开环操纵试验中出现的大迎角振荡现象,开展单自由度纵向标准激励试验,获取迎角响应历程,从而研究该飞机的俯仰大迎角失稳特性。
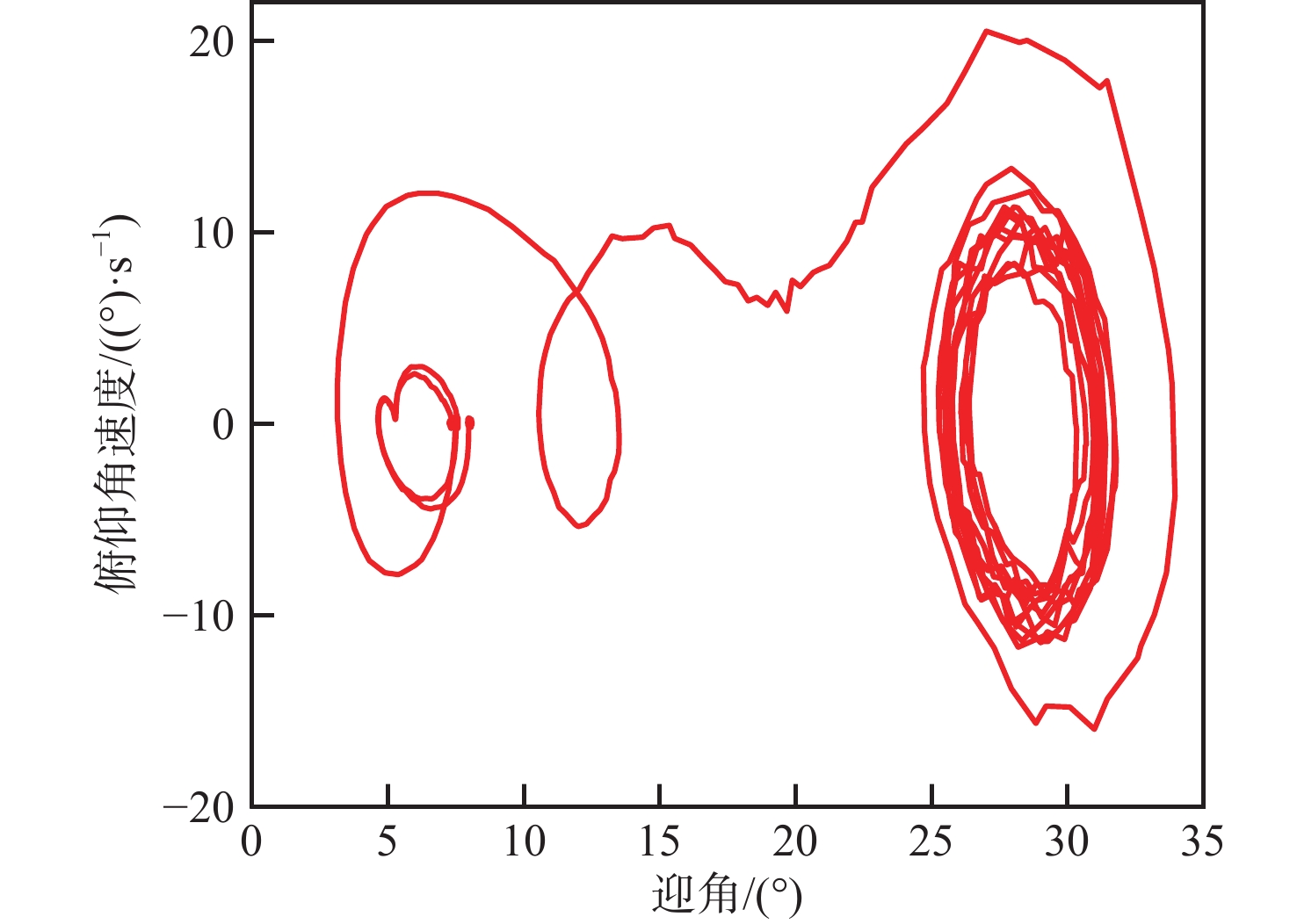
在配平迎角8°位置对升降舵施加正弦激励,幅值为±4°,迎角产生振荡现象如图13所示,振荡平衡位置约为28°。再次,在配平迎角8°位置对升降舵施加“3−2−1−1”激励,幅值为±2°,图13中结果显示不同幅值的激励信号产生相同的迎角振荡现象,且2次振荡平衡位置一致,迎角振荡平衡位置28°与静态测力中俯仰力矩为零的迎角位置26°(见图3(b))较为接近。存在差异原因可能为:虚拟飞行试验存在配平升降舵偏角,使得俯仰力矩为零位置不同。
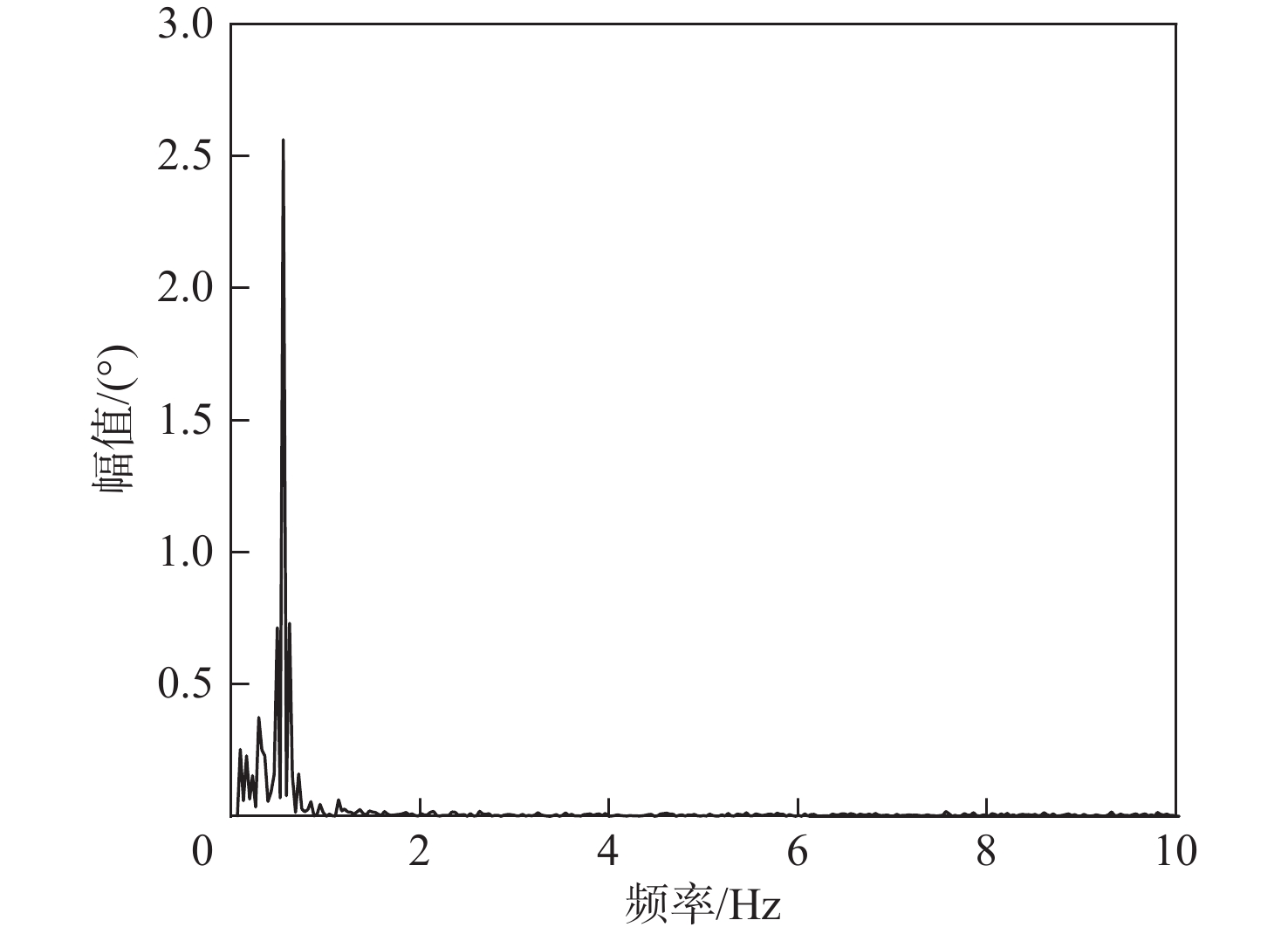
图14和图15分别为俯仰极限环振荡的相平面曲线和振荡频率特性,可以看出振荡主频为0.55 Hz,振荡幅值为2.56°。
 图 15 俯仰极限环振荡频率特性Figure 15. Oscillation frequency characteristics of pitch limit cycle
图 15 俯仰极限环振荡频率特性Figure 15. Oscillation frequency characteristics of pitch limit cycle为进一步探究俯仰极限环持续振荡的受力特性,根据振荡运动历程,得到飞机运动过程中受到的俯仰力矩系数Cm为
Cm=Iy˙qQSc (2) 式中:Iy为y轴的惯性矩;˙q为俯仰角加速度;Q为来流动压;S为机翼面积;c为平均气动弦长。
图16为不同时间段的俯仰力矩系数迟滞曲线,可以发现飞机运动过程中的不同时间范围内,迟滞曲线呈现“8”字、“单向”或双“8”字环,方向如图中箭头所示,迟滞环的形状和交叉点的位置随时间变化而不同,体现了运动过程中的非定常特性。时间段t3内,迟滞曲线在迎角26°和29°附近存在2个交叉点,构成了双“8”字环,方向为逆时针−顺时针−逆时针。
 图 16 俯仰极限环振荡俯仰力矩特性Figure 16. Characteristics of oscillating pitching moment of pitching limit cycle
图 16 俯仰极限环振荡俯仰力矩特性Figure 16. Characteristics of oscillating pitching moment of pitching limit cycle从流动机理角度分析,极限环振荡主要是迎角增大使得翼身融合布局背风区表面发生规流动分离和再附着过程,导致俯仰动稳定性降低,从而产生极限环振荡现象,振荡过程中由于流动的非定常特性使得俯仰迟滞曲线呈现不同形状。
本节针对虚拟飞行试验中的俯仰极限环振荡现象进行时域与频域特性分析,获得了俯仰振荡的平衡角、振幅和主频率,并且从俯仰极限环振荡的力矩特性曲线分析可看出俯仰方向具有明显的非定常特性。上述分析不仅能够验证虚拟飞行试验的可靠性,同时说明虚拟飞行试验能够针对混合翼身融合等先进布局的操稳特性进行评估分析。
5. 结 论
1) 为评估混合翼身融合民机操稳特性,开展三自由度虚拟飞行试验。试验结果表明,该混合翼身融合民机纵向和航向开环操纵均会引起三轴耦合运动,尤其是大迎角区域。
2) 升降舵俯仰开环操纵存在大迎角极限环振荡现象,迎角振荡平衡位置约为28°、振荡幅值约为2.56°、振荡主频率为0.55 Hz;偏航操纵呈现横向运动幅值最大,偏航运动次之,俯仰运动最小的特点,其中横向幅值达到±20°、偏航幅值为±6°。
3) 俯仰极限环振荡过程中俯仰力矩迟滞曲线在不同时间段内,呈现“8”字、“单向环”或双“8”字环,且迟滞环交叉点的位置随时间变化而不同,体现了俯仰运动的非定常特性。
-
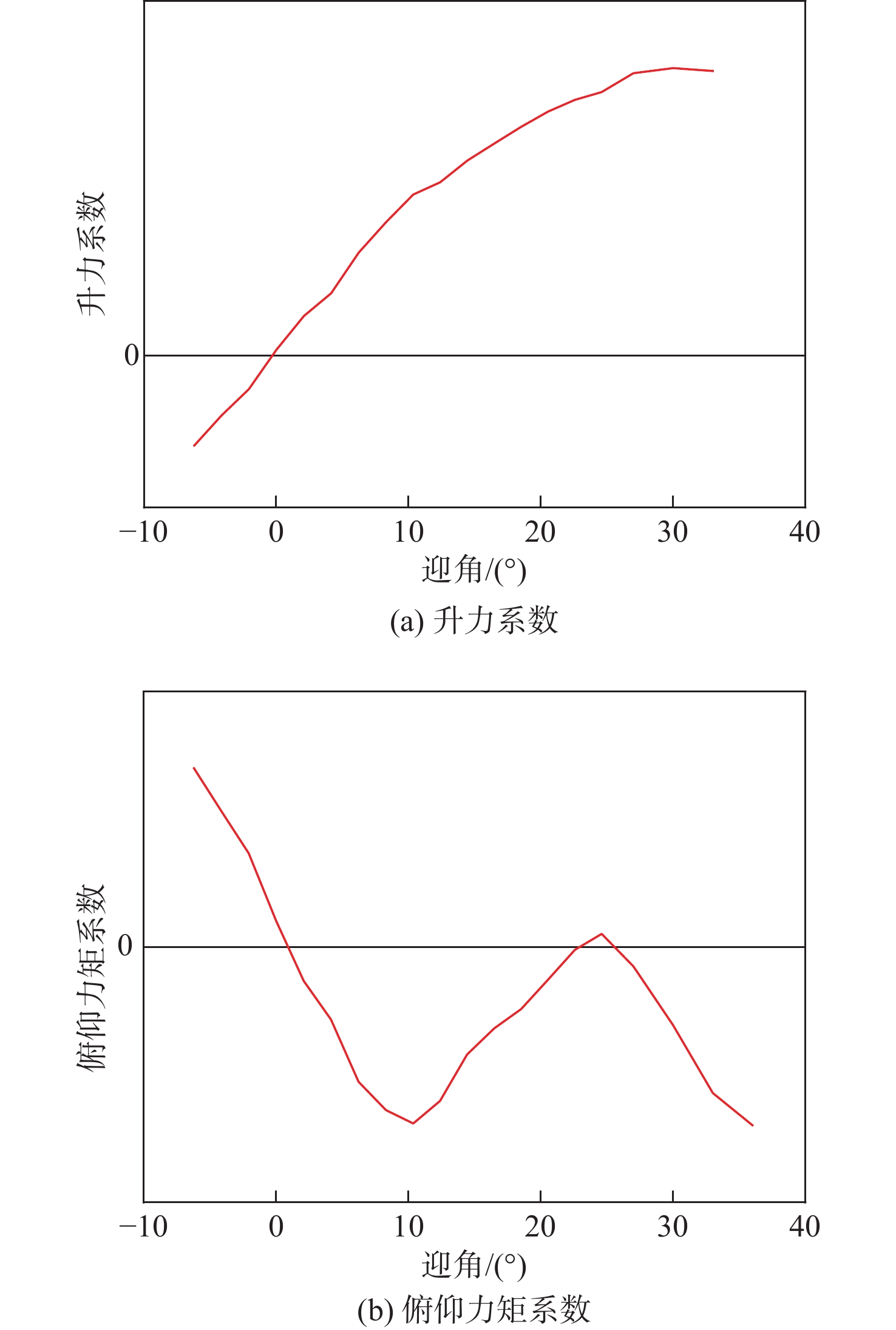
图 3 纵向静态测力试验结果(β=0°)
Figure 3. Longitudinal static force wind tunnel test results(β=0°)

图 8 纵向操纵三轴开环响应结果
Figure 8. Three-axis open-loop responses results of longitudinal control
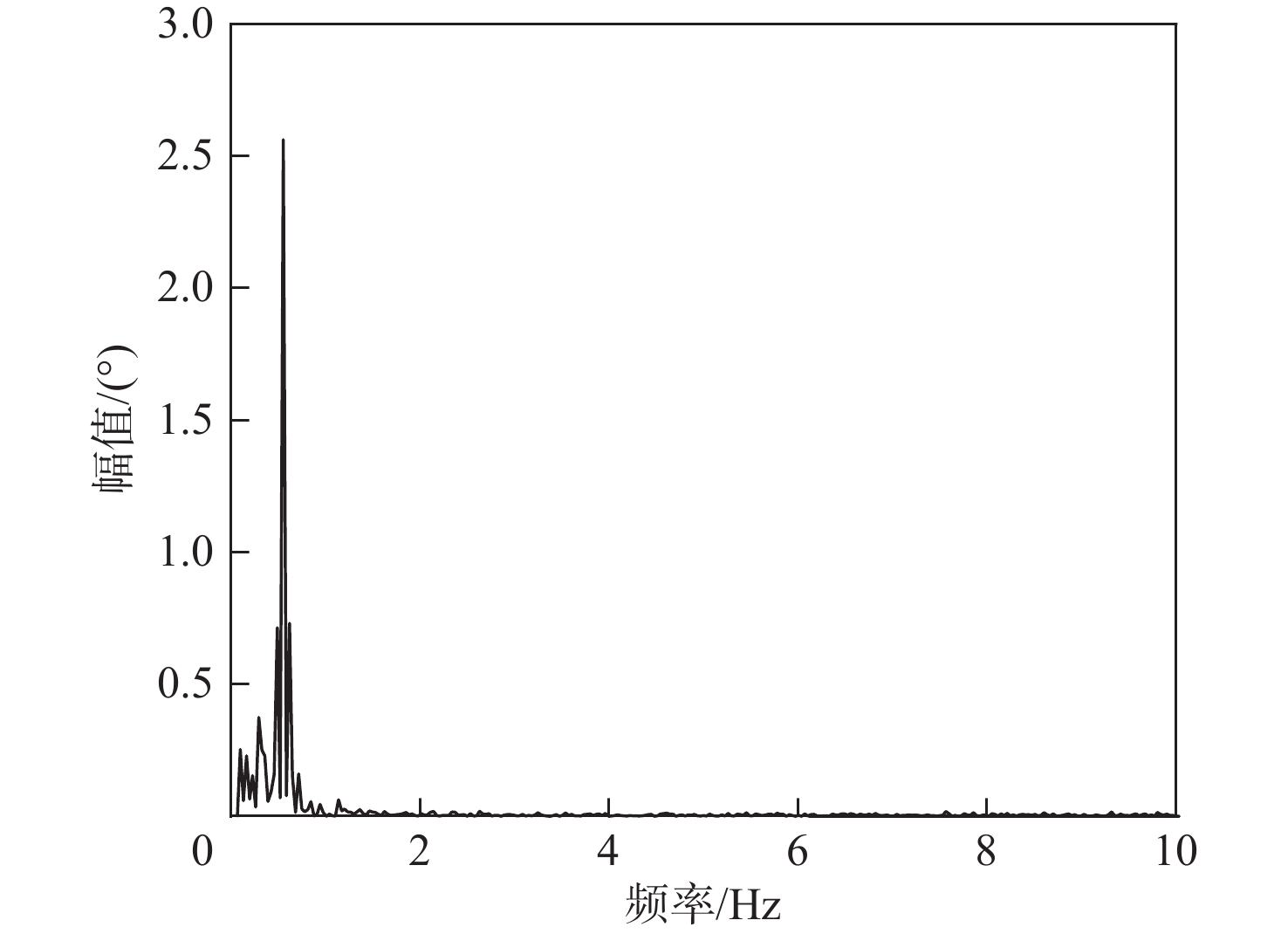
图 15 俯仰极限环振荡频率特性
Figure 15. Oscillation frequency characteristics of pitch limit cycle
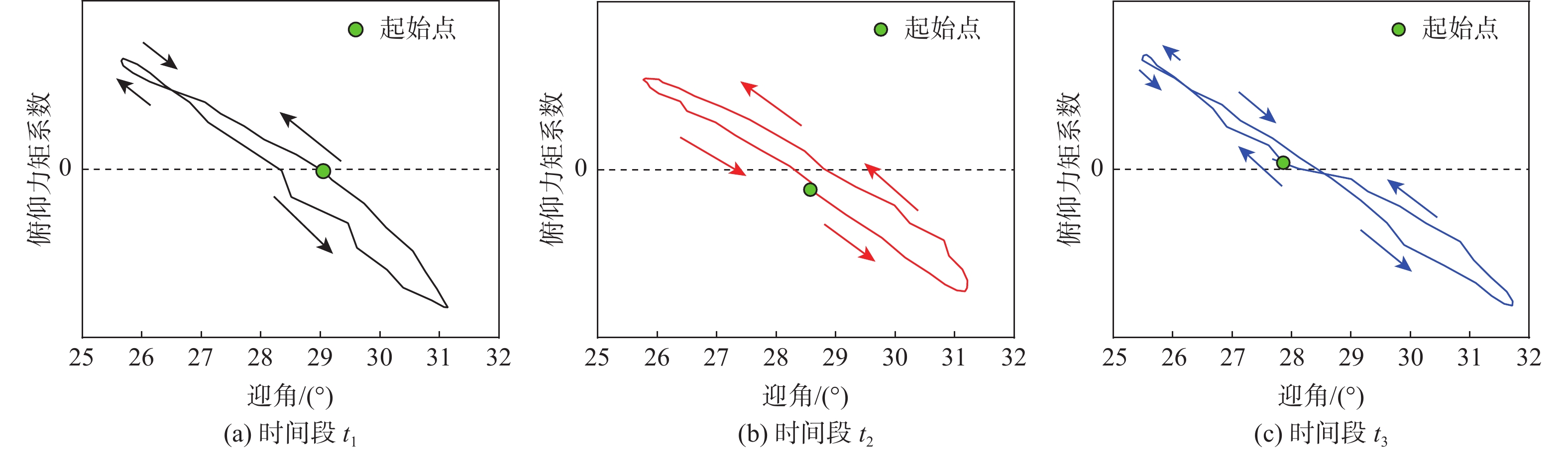
图 16 俯仰极限环振荡俯仰力矩特性
Figure 16. Characteristics of oscillating pitching moment of pitching limit cycle
表 1 混合翼身融合布局民机几何参数
Table 1. Geometric parameters of hybrid wing body civil aircraft
机翼面积S/m2 展长L/m 平均气动弦长c/m 参考中心与机头距离/m 26.802 36 10.413 14.445  下载: 导出CSV
下载: 导出CSV
-
[1] KAWAI R. Acoustic prediction methodology and test validation for an efficient low-noise hybrid wing body subsonic transport: NF1676L-14465[R]. Washington, D. C. : NASA Langley Research Center, 2011. [2] REIST T A, ZINGG D W, RAKOWITZ M, et al. Multifidelity optimization of hybrid wing–body aircraft with stability and control requirements[J]. Journal of Aircraft, 2019, 56(2): 442-456. doi: 10.2514/1.C034703 [3] LU Y, ZHANG S G, ZHANG Z J, et al. Multiple hierarchy risk assessment with hybrid model for safety enhancing of unmanned subscale BWB demonstrator flight test[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2612-2626. doi: 10.1016/j.cja.2019.09.010 [4] RATLIFF C, MARQUART E. An assessment of a potential test technique: AIAA-1995-3415[R]. Reston: AIAA, 1995. [5] MAGILL J C, CATALDI P, MORENCY J R, et al. Demonstration of a wire suspension for wind-tunnel virtual flight testing[J]. Journal of Spacecraft and Rockets, 2009, 46(3): 624-633. doi: 10.2514/1.39188 [6] CARNDUFF S, ERBSLOEH S, COOKE A, et al. Development of a low cost dynamic wind tunnel facility utilizing MEMS inertial sensors[C]//Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit. Reston: AIAA, 2008. [7] GATTO A, LOWENBERG M H. Evaluation of a three degree of freedom test rig for stability derivative estimation[J]. Journal of Aircraft, 2006, 43(6): 1747-1761. doi: 10.2514/1.19821 [8] GATTO A. Application of a pendulum support test rig for aircraft stability derivative estimation[J]. Journal of Aircraft, 2009, 46(3): 927-934. doi: 10.2514/1.38916 [9] GRISHIN I, KHRABROV A, KOLINKO A, et al. Wind tunnel investigation of critical flight regimes using dynamically scaled actively controlled model in 3 dof gimbal[C]//29th Congress of the International Council of the Aeronautical Sciences.Washington, D. C. : I CAS, 2014. [10] STENFELT G, RINGERTZ U. Yaw control of a tailless aircraft configuration[J]. Journal of Aircraft, 2010, 47(5): 1807-1811. doi: 10.2514/1.C031017 [11] 郭林亮, 祝明红, 傅澔, 等. 水平风洞中开展飞机尾旋特性研究的理论分析[J]. 航空学报, 2018, 39(6): 122030.GUO L L, ZHU M H, FU H, et al. Theoretical analysis of research on aircraft spin characteristic in horizontal wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(6): 122030(in Chinese). [12] 郭林亮, 祝明红, 吴海瀛, 等. 结冰条件下大型民机操稳特性研究与风洞虚拟飞行验证[C]//中国力学大会论文集, 2019: 3261-3271.GUO L L, ZHU M H, WU H Y, et al. Study on stability and controllability of large civil aircraft under icing conditions and verification via virtual flight in wind tunnel[C]//Proceedings of Chinese Conference of Theoretical and Applied Mechanics, 2019: 3261-3271. [13] 聂博文, 杨洪森, 刘志涛, 等. 倾转四旋翼无人机飞行控制系统集成与风洞虚拟飞行试验应用[C]//中国空气动力学会论文集, 2019: 162-167.NIE B W, YANG H S, LIU Z T, et al. Flight control system integration and wind tunnel virtual flight test of a quad-rotor aircraft[C]//Proceeding of Chinese Aerodynamics Research Society, 2019: 162-167(in Chinese). [14] 郭天豪. 飞翼布局飞机虚拟飞行试验报告[R]. 绵阳: 中国空气动力研究与发展中心, 2019.GUO T H. Report of wind tunnel virtual flight for a flying wing[R]. Mianyang: China Aerodynamics Research and Develoment Center, 2019(in Chinese). [15] 张石玉, 赵俊波, 付增良, 等. 类F-16飞行器风洞虚拟飞行试验研究[J]. 实验流体力学, 2020, 34(1): 49-54.ZHANG S Y, ZHAO J B, FU Z L, et al. Wind tunnel based virtual flight testing research of F-16 fighter[J]. Journal of Experiments in Fluid Mechanics, 2020, 34(1): 49-54(in Chinese). [16] 付军泉, 史志伟, 耿玺, 等. 基于试验分岔分析的翼身融合飞行器纵向稳定性[J]. 航空学报, 2022, 43(1): 124931. doi: 10.7527/j.issn.1000-6893.2022.1.hkxb202201022FU J Q, SHI Z W, GENG X, et al. Longitudinal stability of blended-wing-body aircraft based on experimental bifurcation analysis[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(1): 124931(in Chinese). doi: 10.7527/j.issn.1000-6893.2022.1.hkxb202201022 [17] 付军泉, 史志伟, 陈杰, 等. 一种翼身融合布局飞行器的偏离特性分析[J]. 实验流体力学, 2020, 34(6): 32-37.FU J Q, SHI Z W, CHEN J, et al. Departure characteristics of blended-wing-body aircraft[J]. Journal of Experiments in Fluid Mechanics, 2020, 34(6): 32-37(in Chinese). [18] 岑飞, 聂博文, 刘志涛, 等. 低速风洞带动力模型自由飞试验[J]. 航空学报, 2017, 38(10): 121214.CEN F, NIE B W, LIU Z T, et al. Low speed wind tunnel free-flight test of powered sub-scale aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(10): 121214(in Chinese). [19] 李周复. 风洞试验手册[M]. 北京: 航空工业出版社, 2015: 4-5.LI Z F. Handbook of wind tunnel test[M]. Beijing: Aviation Industry Press, 2015: 4-5 (in Chinese). -

 下载:
下载:





 下载:
下载:








 点击查看大图
点击查看大图
计量
- 文章访问数: 323
- HTML全文浏览量: 453
- PDF下载量: 42
- 被引次数: 0
