



-
摘要:
针对高超声速变外形飞行器变形带来的参数摄动大、变形过程建模难、外界干扰复杂等大不确定问题,研究了一类可变后掠飞行器建模与姿态控制问题,设计了一种有限时间控制方案。针对变外形飞行器建立了带有变形量的面向姿态控制的三自由度模型,该模型能够反映出变外形飞行器的内在影响。分析了变外形飞行器在典型状态下的气动特征,并给出了连续变形关键气动数据可行处理方案。针对可连续变形的飞行器设计了一套有限时间控制方案,并证明了系统稳定性。进一步考虑控制律中用到的指令微分项,设计了有限时间指令收敛滤波器。利用扩张状态观测器,估计不易测量状态和“综合扰动”。以考虑复杂干扰下的高超声速变外形飞行器为对象进行仿真,结果表明:所设计的控制方案可解决不同变形速率下、存在复合干扰的飞行器姿态控制问题。
-
关键词:
- 高超声速变外形飞行器 /
- 气动特性分析 /
- 有限时间控制 /
- 有限时间滤波器 /
- 扩张状态观测器
Abstract:The attitude control of hypersonic morphing flight vehicles cause problems of large uncertainties, such as time-varying parameter perturbation, difficulty in modeling deformation process, and complex "lumped disturbances". To address these problems, a control-oriented model for variable-sweep wing hypersonic flight vehicles is established, and a finite-time control scheme is proposed. Firstly, a three-degree-of-freedom model is established for attitude control, which can reflect the influence caused by deformation. Secondly, the aerodynamic characteristics of the hypersonic morphing flight vehicle in some typical states are analyzed, and a feasible method for the key aerodynamic data of continuous deformation is developed. Thirdly, a finite-time control scheme is designed for the continuously deformable vehicle, and the system stability is demonstrated. Further, the finite-time convergence filter is designed, considering the command differentiation term used in the control law. An extended state observer is also used to estimate the unmeasurable states and the "lumped disturbances". Finally, numerical simulations are performed with complex disturbances, and the results show that the proposed control scheme can solve the attitude control problem for the vehicle with complex disturbances at different deformation rates.
-

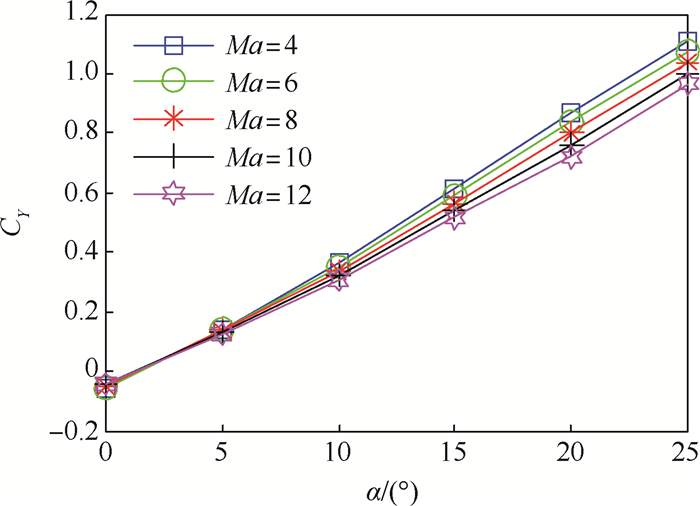
图 2 不同马赫数下升力系数CY随迎角变化
Figure 2. Variation trend of lift coefficient CY with angle of attack change at different Mach numbers

图 3 不同马赫数下阻力系数CD随迎角变化
Figure 3. Variation trend of drag coefficient CD with angle of attack change at different Mach numbers

图 4 不同马赫数下升阻比Y/D随迎角变化
Figure 4. Variation trend of lift-drag ratio Y/D with angle of attack change at different Mach numbers

图 5 不同构型下升阻比Y/D随迎角变化(Ma=8)
Figure 5. Variation trend of lift-drag ratio Y/D with angle of attack change with different configurations (Ma=8)

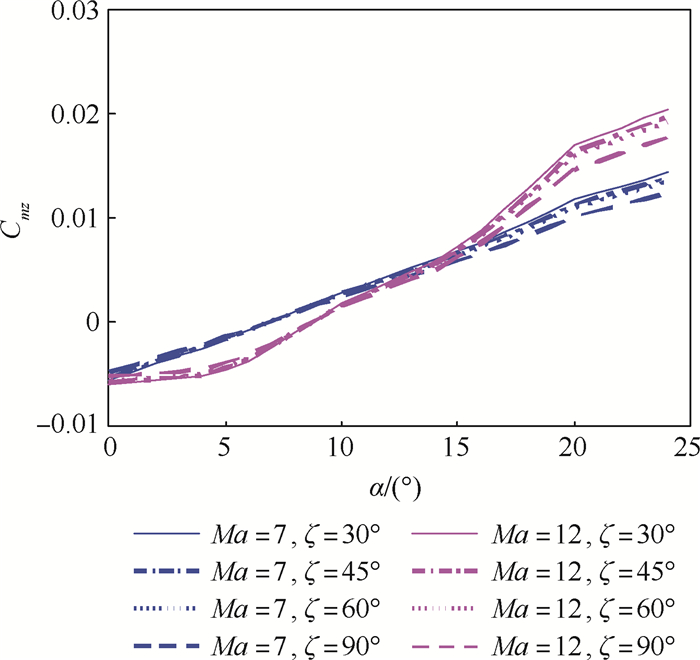
图 6 不同构型下俯仰力矩系数Cmz随迎角变化(Ma=7, 12)
Figure 6. Variation trend of pitching moment coefficient Cmz with angle of attack change with different configurations (Ma=7, 12)

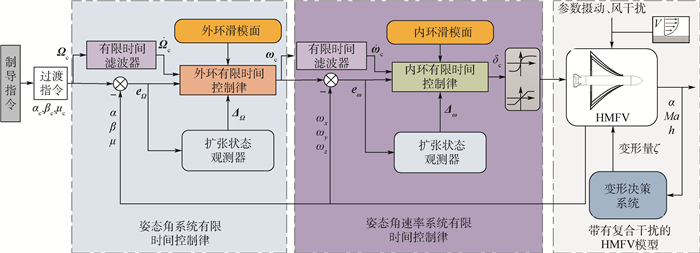
图 7 HMFV的有限时间收敛控制器方案框图
Figure 7. Schematic diagram of finite-time convergence controller for HMFV

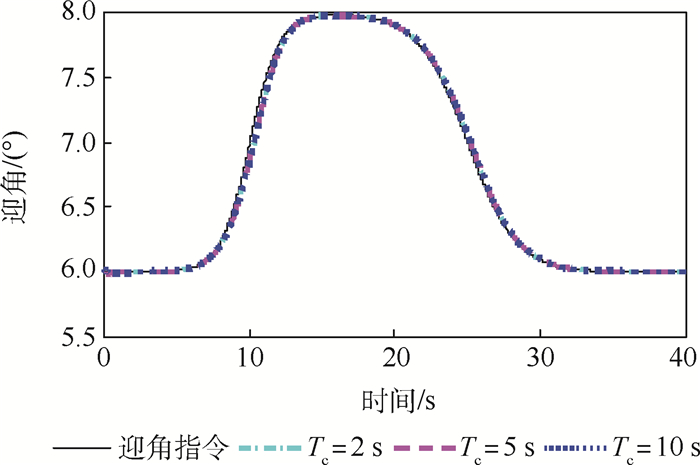
图 15 不同变形速率下的迎角跟踪误差
Figure 15. Tracking error of angle of attack with different morphing velocities

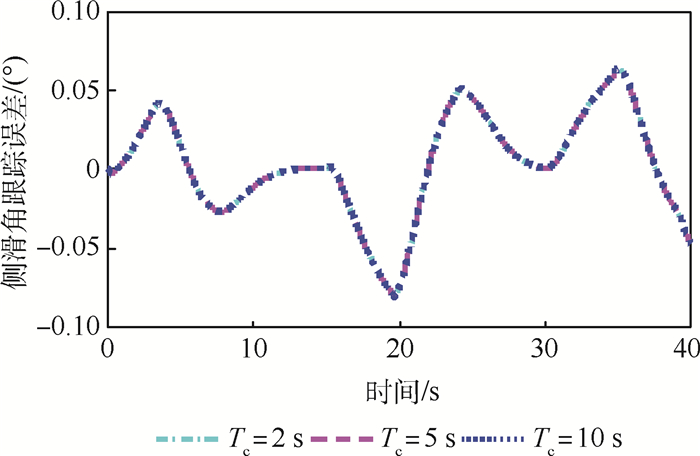
图 16 不同变形速率下的侧滑角跟踪误差
Figure 16. Tracking error of sideslip angle with different morphing velocities

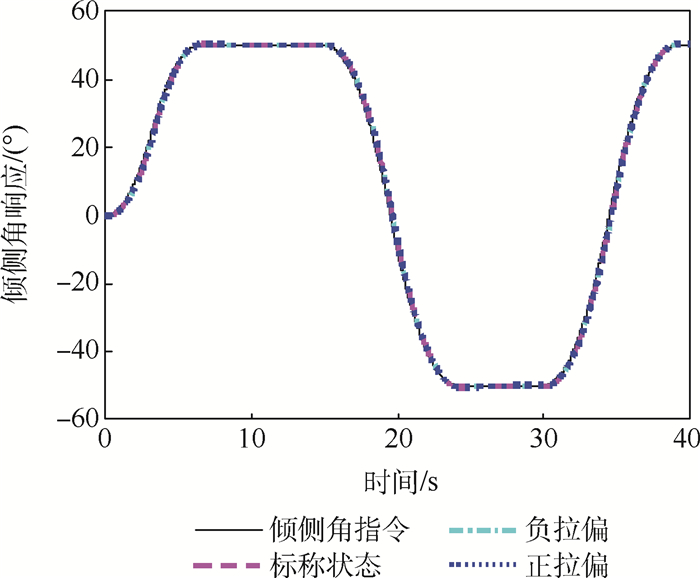
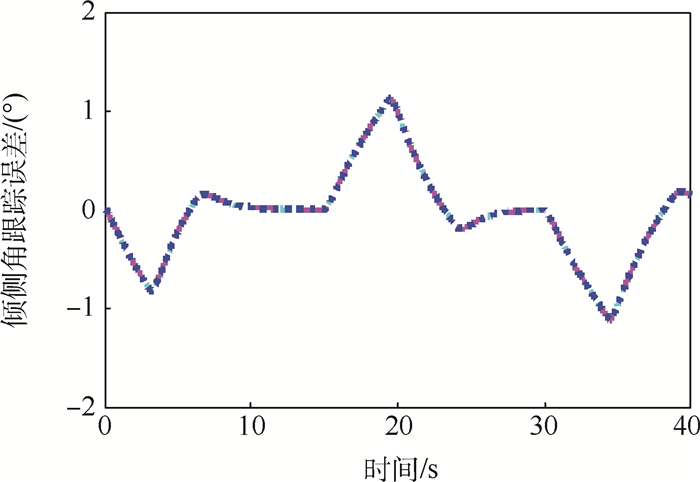
图 17 不同变形速率下的倾侧角跟踪误差
Figure 17. Tracking error of bank angle with different morphing velocities

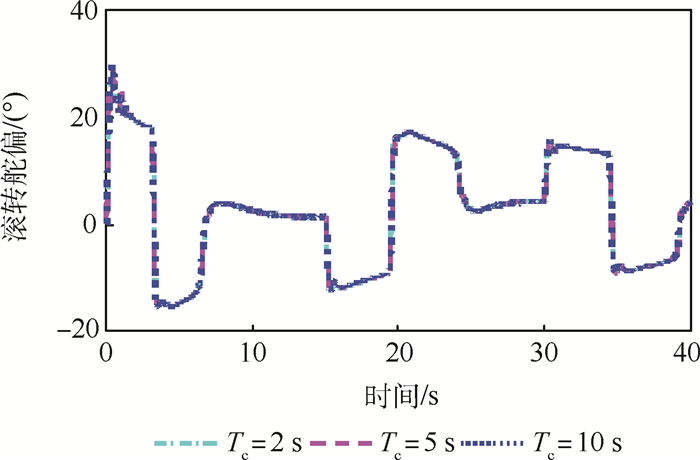
图 18 不同变形速率下的滚转通道舵偏δx响应
Figure 18. Response of deflection angle δx with different morphing velocities

图 19 不同变形速率下的俯仰通道舵偏δz响应
Figure 19. Response of deflection angle δz with different morphing velocities

图 20 不同变形速率下的偏航通道舵偏δy响应
Figure 20. Response of deflection angle δy with different morphing velocities
表 1 气动插值表状态范围
Table 1. State range of aerodynamic interpolation
状态量 数值范围 速度Ma 2~15 迎角α/(°) 0~+15 侧滑角β/(°) -3~+3 升降舵δz/(°) -30~+30 偏航舵δy/(°) -30~+30 滚转舵δx/(°) -30~+30  下载: 导出CSV
下载: 导出CSV
表 2 变外形飞行器初始状态参数
Table 2. Initial state parameters of HMFV
参数 数值 迎角α/(°) 6 侧滑角β/(°) 0 倾侧角μ/(°) 0 弹道倾角γ/(°) 0 弹道偏角χ/(°) 0 角速率ωx, y, z/((°)·s-1) 0 高度h/km 35 速度Ma 8 舵偏δx, y, z/(°) 0
下载: 导出CSV
表 3 变外形飞行器本体参数
Table 3. Body parameters of HMFV
参数 数值 机体质量mb/kg 1 200 机翼质量mw/kg 110 转动惯量Jbx/(kg·m2) 120 转动惯量Jby/(kg·m2) 1 080 参考面积/m2 1.76 转动惯量Jbz/(kg·m2) 1 230 惯量积Jbxy/(kg·m2) 30 惯量Jwx, y, zmin/(kg·m2) [5, 50, 48] 惯量Jwx, y, zmax/(kg·m2) [8, 46, 42] 参考长度/m 4.23
下载: 导出CSV
表 4 变外形飞行器不确定模型
Table 4. Uncertainty model of HMFV
% 参数 数值 阻力系数项ΔCD ±20 升力系数项ΔCY ±20 侧向力系数项ΔCC ±20 大气密度项Δρ ±15 滚转力矩系数项ΔCmx ±30 偏航力矩系数项ΔCmy ±30 俯仰力矩系数项ΔCmz ±30
下载: 导出CSV
表 5 有限时间收敛控制器设计参数
Table 5. Design parameters of FTCC
参数 数值 外环控制律 κ1Ω=0.6,κ2Ω=0.5,κ3Ω=2
κ4Ω=1,η=0.7, rΩ=2外环扩张状态观测器 βΩ1=[100, 150, 150]T, δΩ=10-3
βΩ2=[300, 450, 350]T, θΩ=0.8内环控制律 κ1ω=0.6,κ2ω=0.5,κ3ω=2
κ4ω=1,η=0.7,rω=2内环扩张状态观测器 βω1=[120, 100, 90]T, δω=10-3
βω2=[450, 350, 350]T, θω=0.8有限时间收敛指令滤波器 rz=2,κz1=10
κz2=10,τ=0.5
下载: 导出CSV
-
[1] 路遥, 刘晓东, 路坤锋. 一种非仿射高超声速飞行器姿态系统控制方法[J]. 宇航学报, 2021, 42(1): 132-140. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB202101015.htmLU Y, LIU X D, LU K F. An attitude control method for non-affine hypersonic flight vehicles[J]. Journal of Astronautics, 2021, 42(1): 132-140(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB202101015.htm [2] 方洋旺, 柴栋, 毛东辉. 吸气式高超声速飞行器制导与控制研究现状及发展趋势[J]. 航空学报, 2014, 35(7): 1776-1786. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201407003.htmFANG Y W, CHAI D, MAO D H. Status and development trend of the guidance and control air-breathing hypersonic vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(7): 1776-1786(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201407003.htm [3] RAFIC M A, CHRISTOPHER S B, MICHAEL F. Morphing aircraft: The need for a new design philosophy[J]. Aerospace Science and Technology, 2016, 49: 154-166. doi: 10.1016/j.ast.2015.11.039 [4] GONG L G, WANG Q, HU C H. Switching control of morphing aircraft based on Q-learning[J]. Chinese Journal of Aeronautics, 2020, 33(2): 672-687. doi: 10.1016/j.cja.2019.10.005 [5] CHEN X Y, LI C N, GONG C L. A study of morphing aircraft on morphing rules along trajectory[J]. Chinese Journal of Aeronautics, 2021, 34(7): 232-243. doi: 10.1016/j.cja.2020.04.032 [6] YAN B B, DAI P, LIU R F. Adaptive super-twisting sliding mode control of variable sweep morphing aircraft[J]. Aerospace Science and Technology, 2019, 92: 198-210. doi: 10.1016/j.ast.2019.05.063 [7] 董朝阳, 江未来, 王青. 变翼展飞行器平滑切换LPV鲁棒H∞控制[J]. 宇航学报, 2015, 36(11): 1270-1278. doi: 10.3873/j.issn.1000-1328.2015.11.008DONG C Y, JIANG W L, WANG Q. Smooth switching LPV robust H∞ control for variable span vehicle[J]. Journal of Astronautics, 2015, 36(11): 1270-1278(in Chinese). doi: 10.3873/j.issn.1000-1328.2015.11.008 [8] 江未来, 董朝阳, 王通. 变体飞行器平滑切换LPV鲁棒控制[J]. 控制与决策, 2016, 31(1): 66-72. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201601009.htmJIANG W L, DONG C Y, WANG T. Smooth switching LPV robust control for morphing aircraft[J]. Control and Decision, 2016, 31(1): 66-72(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201601009.htm [9] JIANG W L, DONG C Y, WANG Q. A systematic method of smooth switching LPV controllers design for a morphing aircraft[J]. Chinese Journal of Aeronautics, 2015, 28(6): 1640-1649. doi: 10.1016/j.cja.2015.10.005 [10] 程昊宇, 董朝阳, 王青. 变体飞行器的非脆弱有限时间鲁棒控制器设计[J]. 控制与决策, 2017, 32(11): 1932-1939. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201711002.htmCHENG H Y, DONG C Y, WANG Q. Non-fragile finite-time robust controller design for morphing aircraft[J]. Control and Decision, 2017, 32(11): 1932-1939(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201711002.htm [11] 贾臻, 董朝阳, 王青. 链式平滑切换变体飞行器LPV鲁棒跟踪控制[J]. 北京航空航天大学学报, 2017, 43(4): 831-842. doi: 10.13700/j.bh.1001-5965.2016.0246JIA Z, DONG C Y, WANG Q. LPV robust tracking control for chain smooth switched morphing aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(4): 831-842(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0246 [12] 梁帅, 杨林, 杨朝旭. 基于Kalman滤波的变体飞行器T-S模糊控制[J]. 航空学报, 2020, 41(2): 724274. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2020S2007.htmLIANG S, YANG L, YANG Z X. Kalman filter based T-S fuzzy control for morphing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(2): 724274(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2020S2007.htm [13] 马文风. 高超声速变形飞行器建模与纵向鲁棒控制方法研究[D]. 长沙: 国防科技大学, 2017: 45-60.MA W F. Research on modeling and longitudinal robust control methods for hypersonic morphing aircrafts[D]. Changsha: National University of Defense Technology, 2017: 45-60(in Chinese). [14] WU Z H, LU J C, ZHOU Q. Modified adaptive neural dynamic surface control for morphing aircraft with input and output constraints[J]. Nonlinear Dynamics, 2017, 87(4): 2367-2383. doi: 10.1007/s11071-016-3196-0 [15] JIAO X, FIDAN B, JIANG J. Adaptive mode switching of hypersonic morphing aircraft based on type-2 TSK fuzzy sliding mode control[J]. Science China: Information Science, 2015, 58(7): 1-15. [16] WU Z H, LU J C, RAJPUT J. Adaptive neural control based on high order integral chained differentiator for morphing aircraft[J]. Mathematical Problems in Engineering, 2015, 10: 1-12. [17] 储培, 倪昆, 程林. 基于反步滑模的高超声速变体飞行器鲁棒控制[J]. 计算机仿真, 2018, 35(8): 41-45. doi: 10.3969/j.issn.1006-9348.2018.08.009CHU P, NI K, CHENG L. Robust control of hypersonic morphing vehicle based on backstepping sliding mode control[J]. Journal of Computer Simulation, 2018, 35(8): 41-45(in Chinese). doi: 10.3969/j.issn.1006-9348.2018.08.009 [18] DONG C Y, LIU C, WANG Q. Switched adaptive active distur-bance rejection control of variable structure near space vehicles based on adaptive dynamic programming[J]. Chinese Journal of Aeronautics, 2019, 32(7): 1684-1694. doi: 10.1016/j.cja.2019.03.009 [19] JIANG B Y, HU Q L, FRISWELL M I. Fixed-time attitude control for rigid spacecraft with actuator saturation and faults[J]. IEEE Transactions on Control Systems Technology, 2016, 24(5): 1892-1898. doi: 10.1109/TCST.2016.2519838 [20] SHI X N, ZHANG Y A, ZHOU D. Global fixed-time attitude tracking control for the rigid spacecraft with actuator saturation and faults[J]. Acta Astronautica, 2019, 155: 325-333. doi: 10.1016/j.actaastro.2018.11.026 [21] 李新凯, 张宏立, 范文慧. 基于时变障碍李雅普诺夫函数的变体无人机有限时间控制[J]. 自动化学报, 2022, 48(8): 2062-2074. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202208016.htmLI X K, ZHANG H L, FAN W H. Finite-time control for morphing aerospace vehicle based on time-varying barrier Lyapunov function[J]. Acta Automatica Sinica, 2022, 48(8): 2062-2074(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO202208016.htm [22] WANG P, TANG G J, LIU L H. Nonlinear hierarchy-structured predictive control design for a generic hypersonic vehicle[J]. Science China: Technological Sciences, 2013, 56(8): 2025-2036. doi: 10.1007/s11431-013-5273-7 [23] POLYAKOV A, FRIDMAN L. Stability notions and Lyapunov functions for sliding mode control systems[J]. Journal of the Franklin Institute, 2014, 351(4): 1831-1865. doi: 10.1016/j.jfranklin.2014.01.002 [24] WANG X, GUO J, TANG S J. Fixed-time disturbance observer based fixed-time backsteping control for an air-breathing hypersonic vehicle[J]. ISA Transactions, 2019, 88: 233-245. doi: 10.1016/j.isatra.2018.12.013 [25] SHEN Y, HUANG Y. Global finite-time stabilisation for a class of nonlinear systems[J]. International Journal of Systems Science, 2012, 43(1): 73-78. doi: 10.1080/00207721003770569 [26] 丁一波, 岳晓奎, 代洪华. 考虑进气约束的高超声速飞行器预定性能控制[J]. 航空学报, 2021, 42(11): 177-194. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202111012.htmDING Y B, YUE X K, DAI H H. Prescribed performance controller for flexible air-breathing hypersonic vehicle with inlet unstart constraint[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 177-194(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202111012.htm [27] ZHANG Y DONG X W, LI Q D, et al. Robust adaptive control for hypersonic gliding vehicles based on NESO[C]// Procee-dings of 13th IEEE International Conference on Control and Automation. Piscataway: IEEE Press, 2017: 431-437. [28] 谭诗利, 雷虎民, 王鹏飞. 基于正切Sigmoid函数的跟踪微分器[J]. 系统工程与电子技术, 2019, 41(7): 1590-1596. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201907021.htmTAN S L, LEI H M, WANG P F. Design of tracking differentiator based on tangent Sigmoid function[J]. Systems Engineering and Electronics, 2019, 41(7): 1590-1596(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201907021.htm -

 下载:
下载:












 点击查看大图
点击查看大图
计量
- 文章访问数: 577
- HTML全文浏览量: 135
- PDF下载量: 110
- 被引次数: 0
