



MEMS gyro scope noise reduction method based on model decomposition multi-scale entropy
-
摘要:
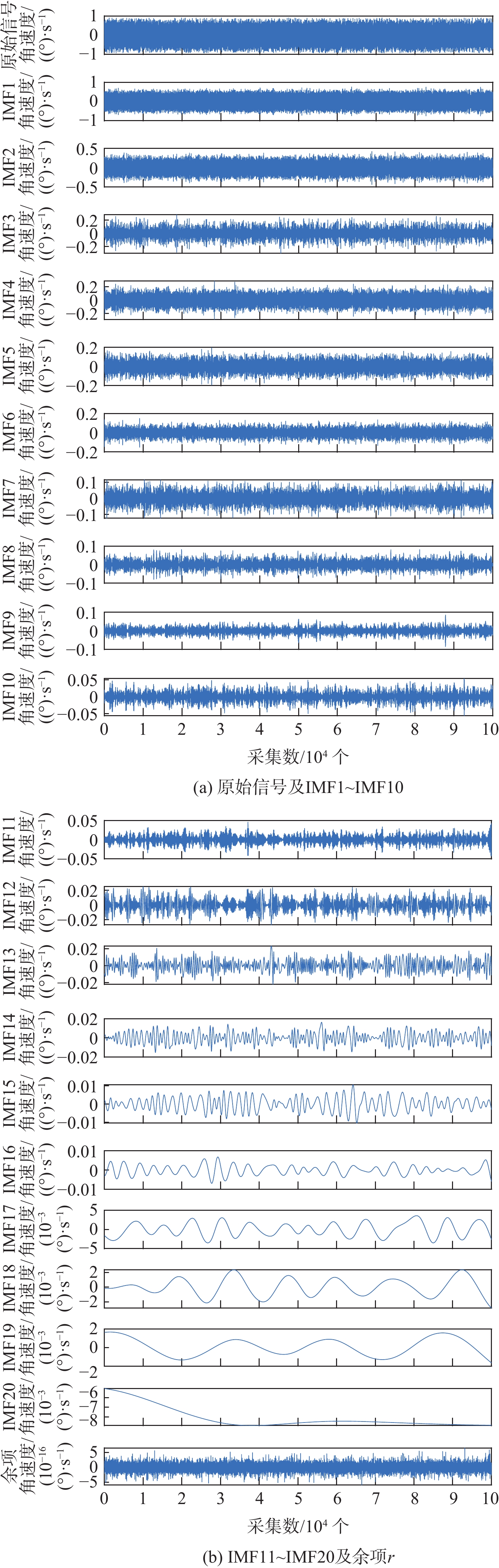
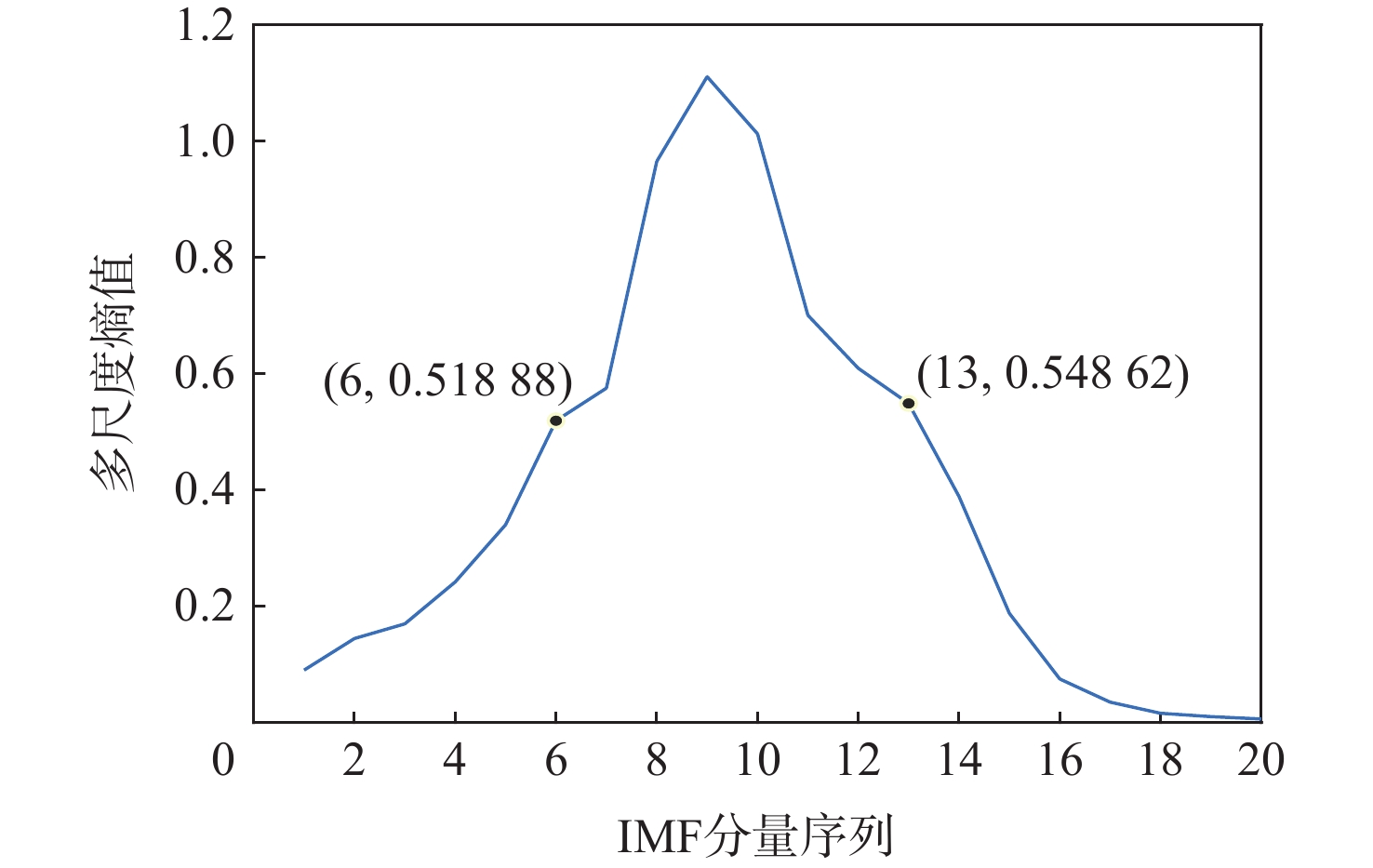
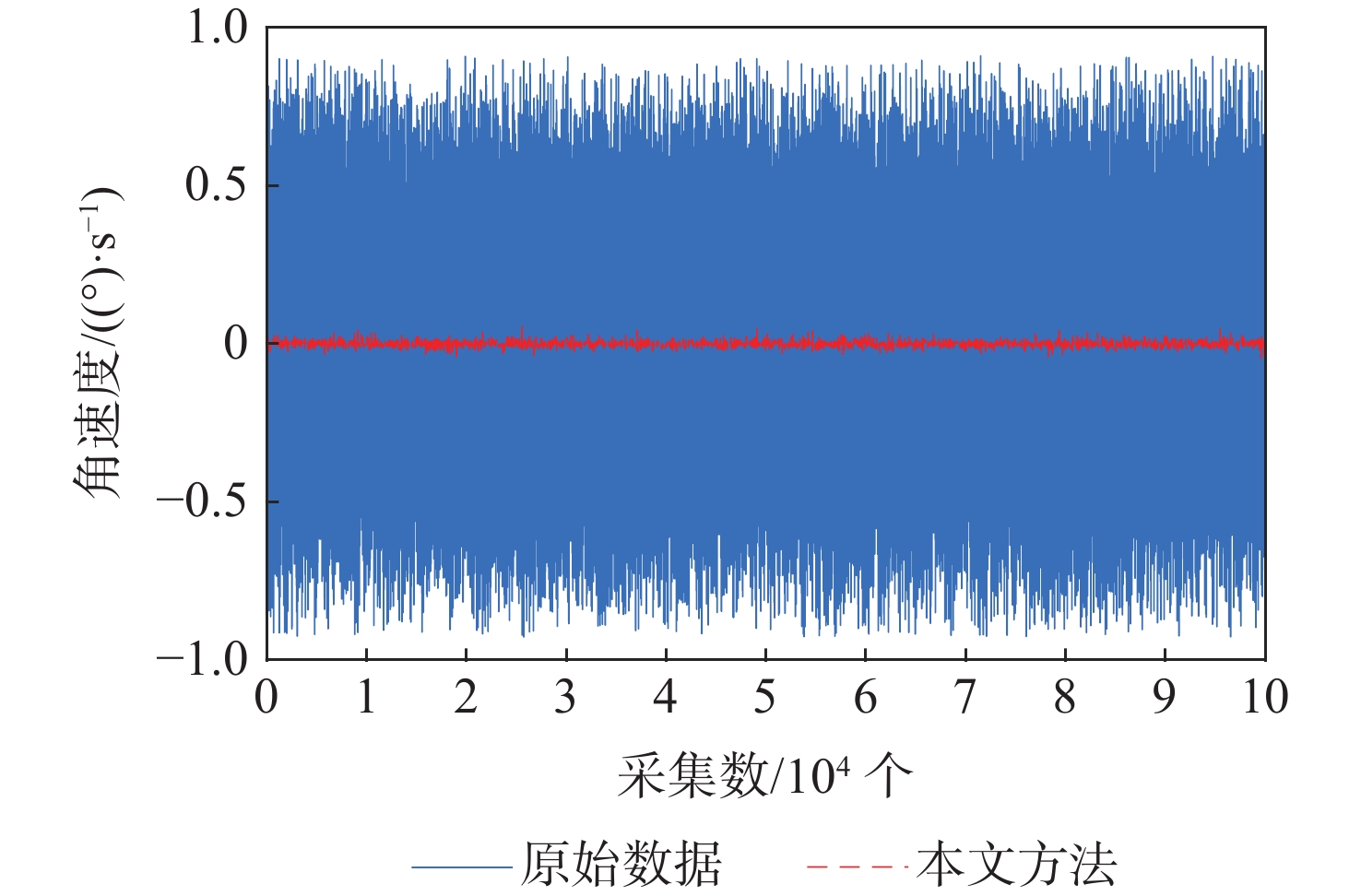
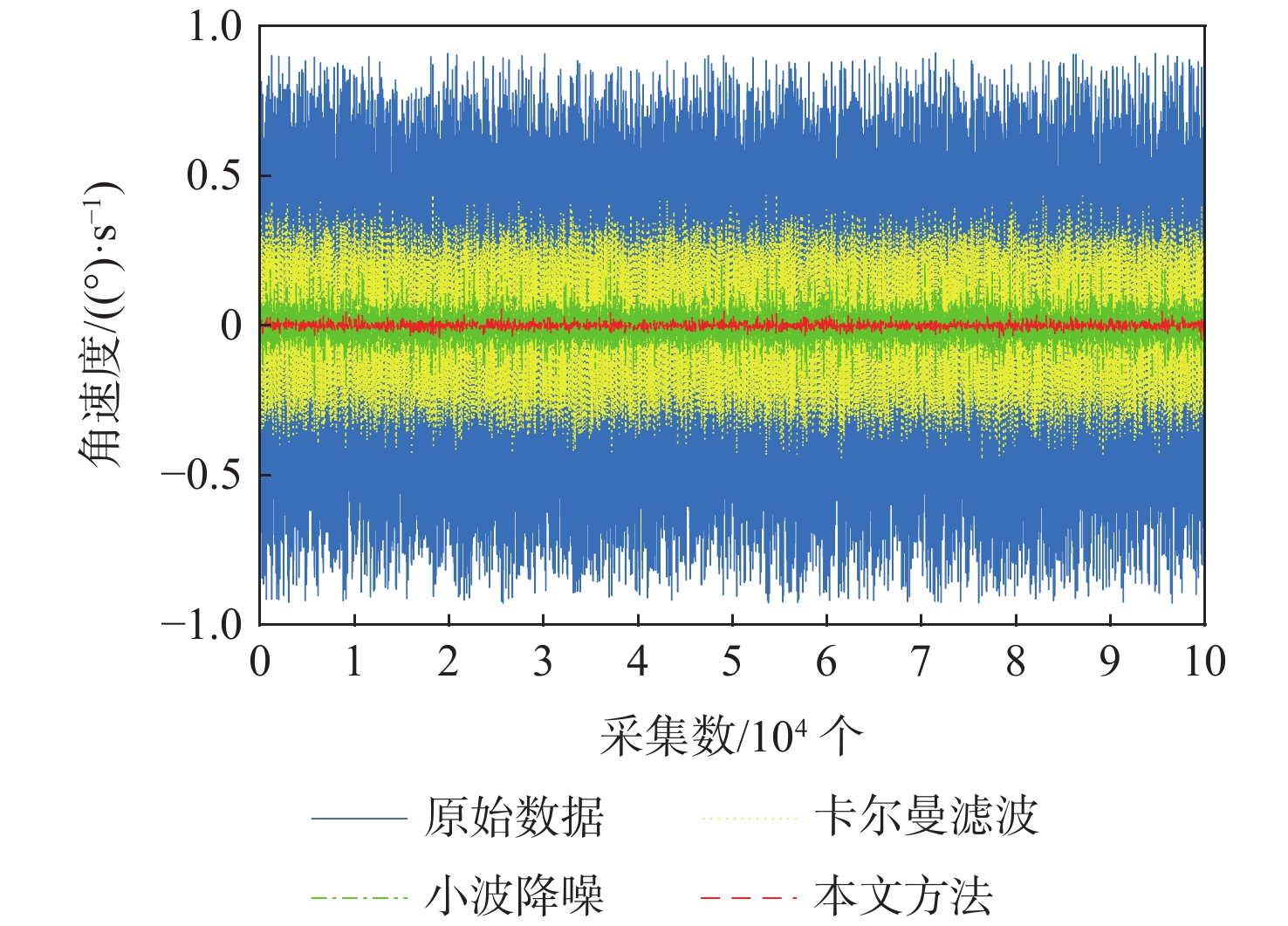
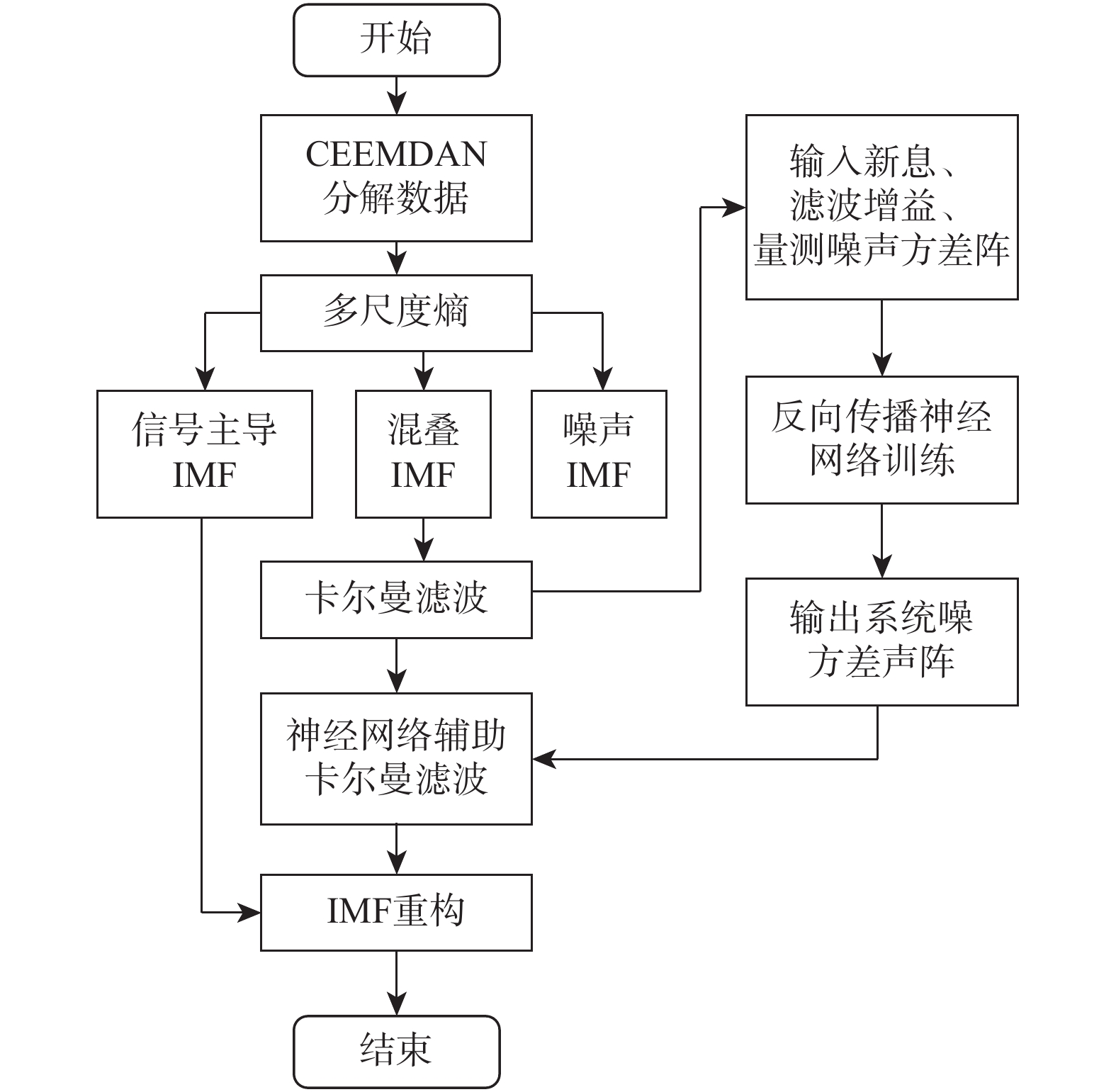
为了有效抑制微机械陀螺仪的随机误差,基于完备自适应噪声集合经验模态分解(CEEMDAN),结合反向传播神经网络(BPNN)建模和卡尔曼滤波(KF),提出了一种微机械陀螺仪改进的降噪方法。微机械陀螺仪数据经过CEEMDAN分解,得到本征模态分量(IMF);利用多尺度熵(MSE)算法对分量分类,对其中信号噪声混叠的分量进行反向传播神经网络辅助卡尔曼滤波;再对滤波结果和信号主导的分量进行重构,实现微机械陀螺信号降噪。实验验证了所提方法的有效性,该方法相比卡尔曼滤波、小波降噪等有更好的降噪效果。
Abstract:An improved MEMS gyroscope noise reduction approach is suggested based on complete ensemble EMD with adaptive noise (CEEMDAN), combined with back-propagation neural network (BPNN) modeling, and Kalman filtering (KF) method in order to effectively suppress the random error of MEMS gyroscope. The original data of the MEMS gyroscope is decomposed into the intrinsic mode function (IMF), and the IMF is classified by a multi-scale entropy (MSE) algorithm. The overlapping noise IMF is then fed back into the BPNN to assist KF, and the filter result and signal-led IMF are reconstructed to realize MEMS gyroscope signal noise reduction. Experiments show that the method has a better noise reduction effect than KF, small wave noise reduction, etc., and improves the accuracy of the MEMS gyroscope.
-
Key words:
- MEMS gyroscope /
- empirical modal decomposition /
- multi-scale entropy /
- Kalman filtering /
- neural network
-
表 1 AR模型系数
Table 1. Parameters of AR model
模型 a1 a2 a3 AIC AR(1) −0.6112 0 0 −2.08×105 AR(2) −0.8471 0.3859 0 −2.24×105 AR(3) −0.762 0.199 0.2206 −2.29×105  下载: 导出CSV
下载: 导出CSV
表 2 微机械陀螺仪5种噪声
Table 2. Five kinds of noise of MEMS gyroscope
原始数据
或方法量化
噪声/(°)角度
随机游走/
((°)⋅h−12)零偏
不稳定性/
((°)·h−1)角速率
游走/
((°)⋅h−32)速率
斜坡/
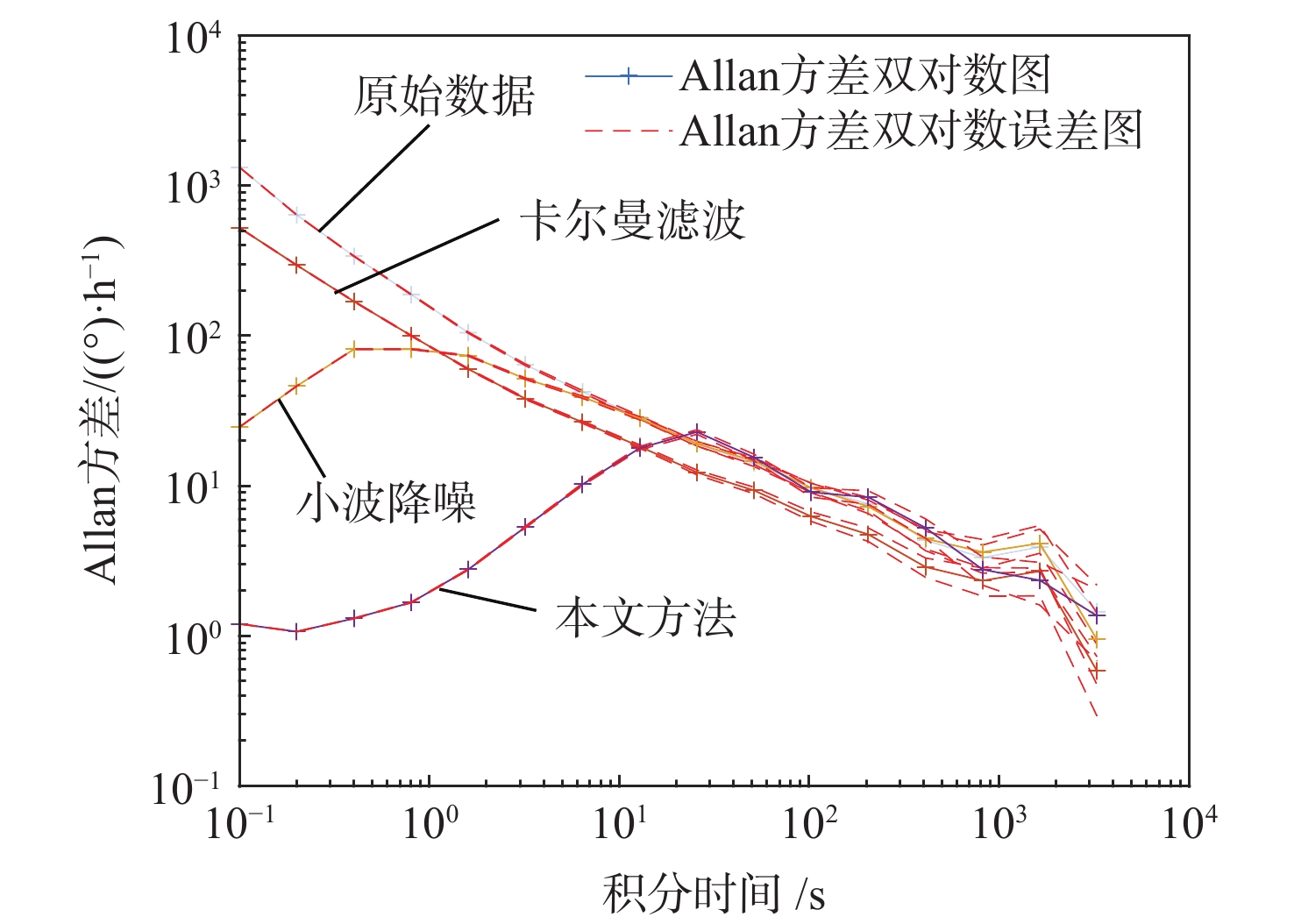
((°)·h−2)原始数据 77.9961 1.3714 95.8285 261.6499 203.7680 卡尔曼滤波 26.2625 1.3949 36.8138 100.5237 78.2844 小波降噪 8.0710 0.7058 58.8837 160.0747 124.5140 本文方法 1.5679 0.1587 20.6749 51.0494 38.5538
下载: 导出CSV
-
[1] 沈强, 刘洁瑜, 赵乾, 等. MEMS陀螺阵列的RCC-OBE估计融合方法[J]. 北京航空航天大学学报, 2018, 44(11): 2373-2379.SHEN Q, LIU J Y, ZHAO Q, et al. RCC-OBE estimation fusion approach for MEMS gyro array[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2373-2379(in Chinese). [2] 刘孝博, 陈光武, 王迪, 等. MEMS陀螺仪漂移和噪声的分析和补偿[J]. 传感技术学报, 2018, 31(3): 368-373.LIU X B, CHEN G W, WANG D, et al. Analysis and compensation of drift and noise in MEMS gyroscope[J]. Chinese Journal of Sensors and Actuators, 2018, 31(3): 368-373(in Chinese). [3] 韩颖. 基于卡尔曼滤波的MEMS陀螺噪声抑制算法设计与实现[J]. 电子测试, 2021(19): 51-53.HAN Y. Design and implementation of noise suppression algorithm for MEMS gyroscope based on Kalman filter[J]. Electronic Test, 2021(19): 51-53(in Chinese). [4] 周斌, 何春华, 刘玉县. 基于小波分析的MEMS陀螺仪信号降噪算法研究[J]. 仪表技术, 2020(7): 4-8.ZHOU B, HE C H, LIU Y X. Research on signal denoising algorithm of MEMS gyroscope based on wavelet analysis[J]. Instrumentation Technology, 2020(7): 4-8(in Chinese). [5] 李文华, 汪立新, 沈强, 等. 基于EMD的MEMS陀螺仪随机漂移分析方法[J]. 北京航空航天大学学报, 2021, 47(9): 1927-1932.LI W H, WANG L X, SHEN Q, et al. Random drift analysis method of MEMS gyroscope based on EMD[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1927-1932(in Chinese). [6] 杨菊花, 刘洋, 陈光武, 等. 基于改进EMD的微机械陀螺随机误差建模方法[J]. 仪器仪表学报, 2019, 40(12): 196-204.YANG J H, LIU Y, CHEN G W, et al. A modeling method for random error of micromechanical gyroscope based on the improved EMD[J]. Chinese Journal of Scientific Instrument, 2019, 40(12): 196-204(in Chinese). [7] 吴保锋, 夏林元, 吴东金, 等. MEMS陀螺仪随机误差分析与小波阈值去噪研究[J]. 电子设计工程, 2020, 28(15): 1-5.WU B F, XIA L Y, WU D J, et al. Random error analysis and wavelet threshold denoising of MEMS gyroscope[J]. Electronic Design Engineering, 2020, 28(15): 1-5(in Chinese). [8] 董晓芬, 陈国光, 田晓丽, 等. 基于CEEMDAN阈值滤波的磁场信号去噪模型[J]. 传感技术学报, 2021, 34(7): 919-925. doi: 10.3969/j.issn.1004-1699.2021.07.011DONG X F, CHEN G G, TIAN X L, et al. Denoising model of magnetic field signal based on CEEMDAN threshold filtering[J]. Chinese Journal of Sensors and Actuators, 2021, 34(7): 919-925(in Chinese). doi: 10.3969/j.issn.1004-1699.2021.07.011 [9] 刘美容, 刘津涛, 何怡刚. 基于EMD复合多尺度熵的模拟电路故障诊断方法[J]. 电子测量技术, 2021, 44(4): 51-56.LIU M R, LIU J T, HE Y G. Simulation circuit fault diagnosis method based on EMD composite multi-scale entropy[J]. Electronic Measurement Technology, 2021, 44(4): 51-56(in Chinese). [10] ZHU Z S, BO Y M, JIANG C H, et al. A MEMS gyroscope noise suppressing method using neural architecture search neural network[J]. Mathematical Problems in Engineering, 2019, 2019: 1-9. [11] 严恭敏, 李四海, 秦永元. 惯性仪器测试与数据分析[M]. 北京: 国防工业出版社. 2015.YAN G M, LI S H, QIN Y Y. Inertial instrument testing and data analysis[M]. Beijing: National Defense Industry Press, 2015(in Chinese). [12] 段志强, 刘洁瑜, 汪立新, 等. BPNN辅助KF的MEMS陀螺仪数据处理方法[J]. 压电与声光, 2020, 42(2): 284-288.DUAN Z Q, LIU J Y, WANG L X, et al. Research on data processing method of MEMS gyroscope based on BPNN assisted Kalman filter[J]. Piezoelectrics & Acoustooptics, 2020, 42(2): 284-288(in Chinese). [13] 王可东, 武雨霞. 一种MEMS陀螺随机漂移的高精度建模方法[J]. 北京航空航天大学学报, 2016, 42(8): 1584-1592.WANG K D, WU Y X. An accurate modeling method for random drift of MEMS gyro[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1584-1592(in Chinese). [14] BAI Y T, WANG X Y, JIN X B, et al. Adaptive filtering for MEMS gyroscope with dynamic noise model[J]. ISA Transactions, 2020, 101: 430-441. doi: 10.1016/j.isatra.2020.01.030 [15] 王晶, 刘强. MEMS传感器误差建模技术研究[J]. 自动化技术与应用, 2021, 40(5): 133-136.WANG J, LIU Q. Research on MEMS sensor error modeling technology[J]. Techniques of Automation and Applications, 2021, 40(5): 133-136(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1090
- HTML全文浏览量: 84
- PDF下载量: 33
- 被引次数: 0
