



A mapping leader formation control strategy for multiple mobile robots based on two-stage sliding mode control
-
摘要:
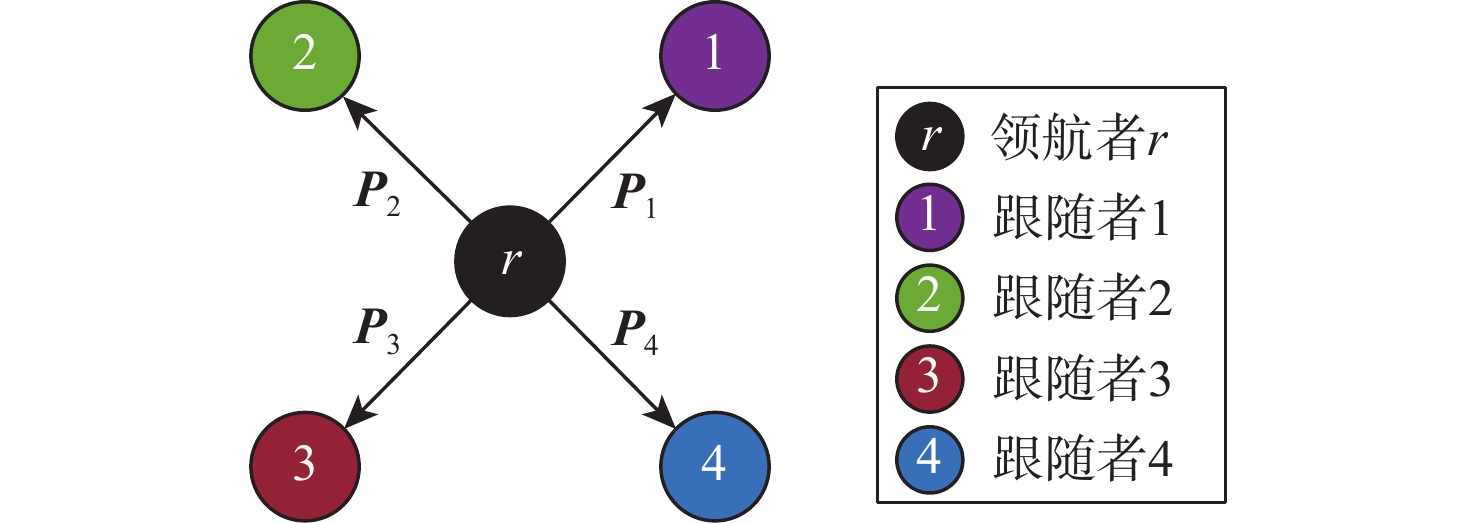
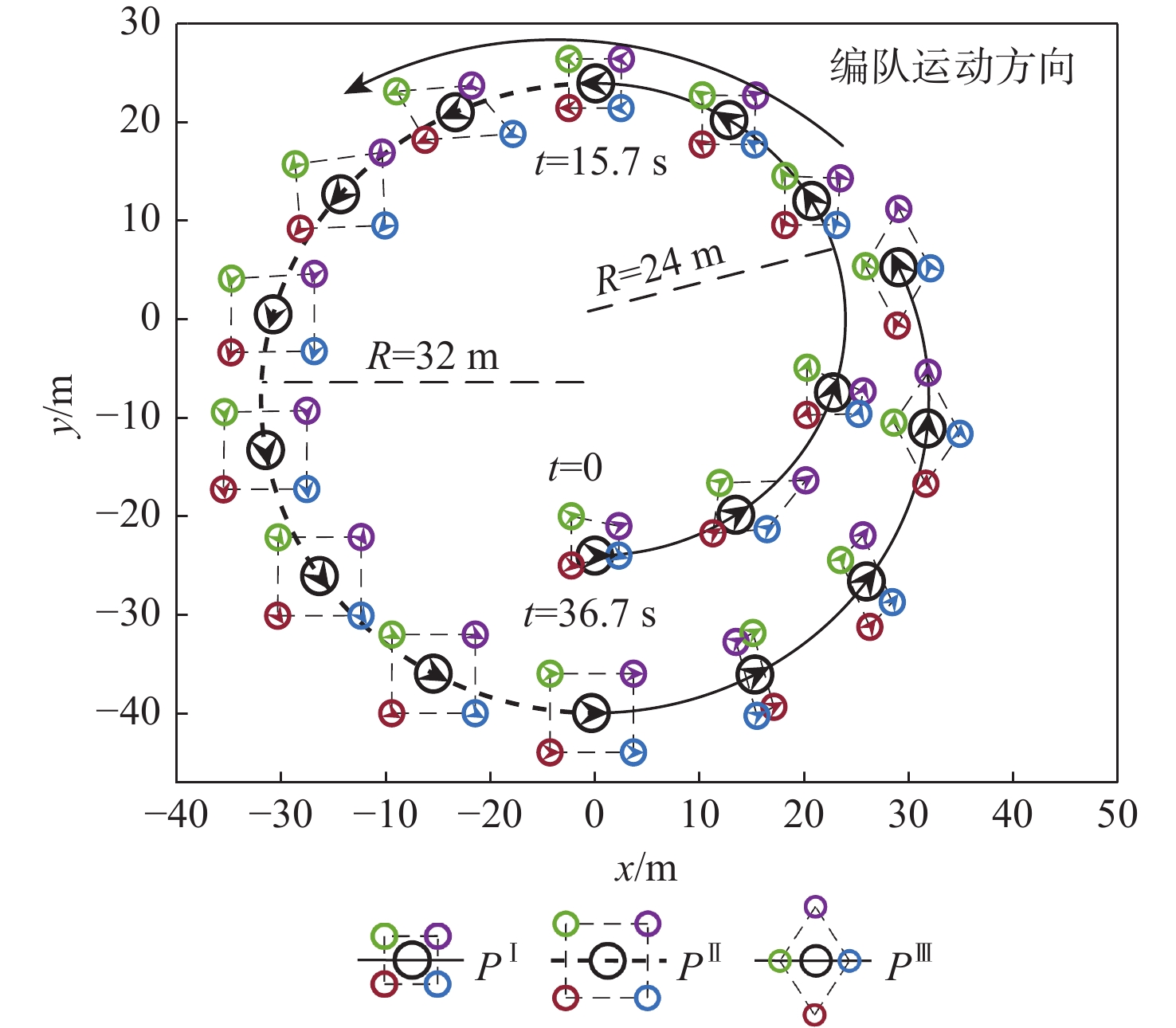
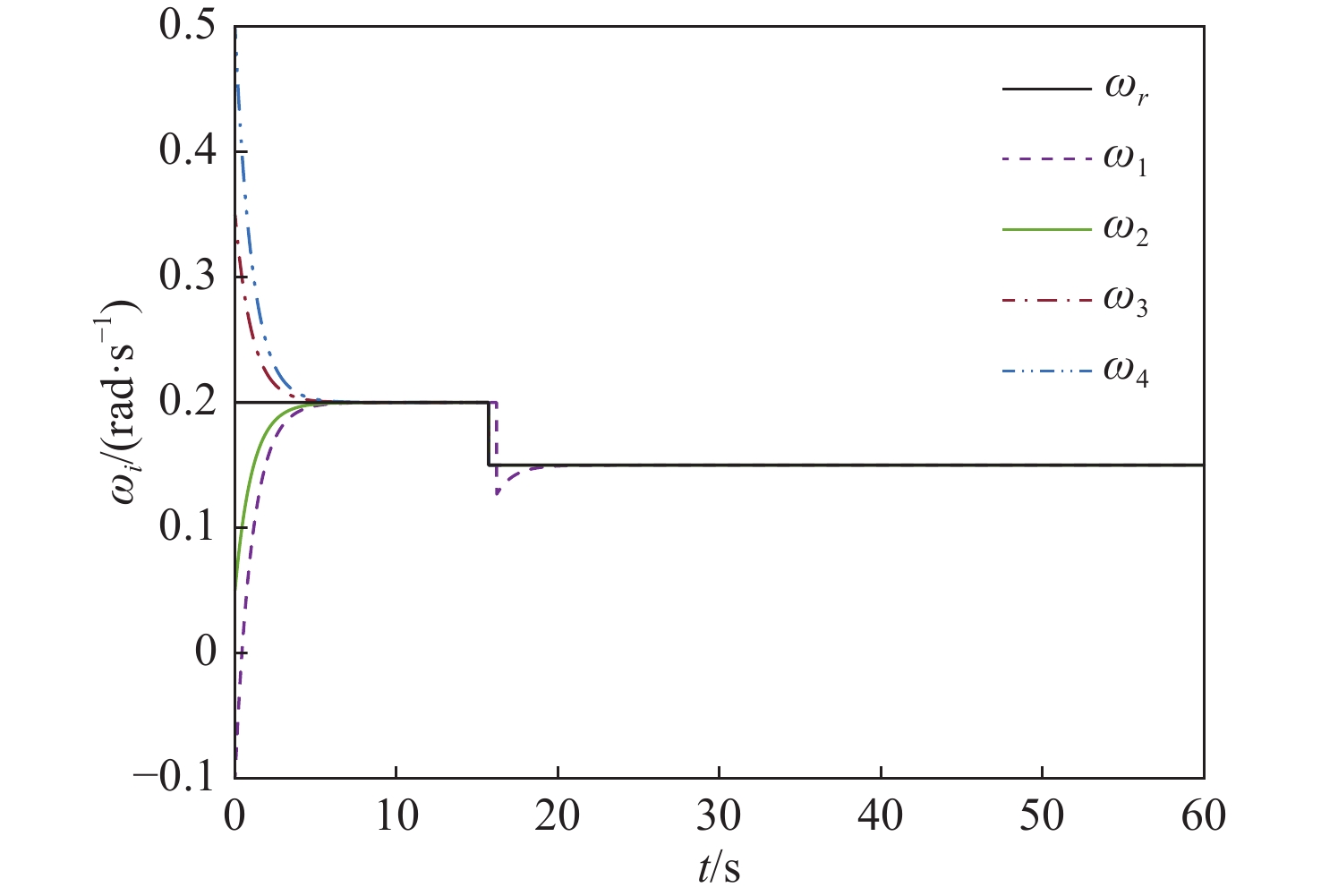
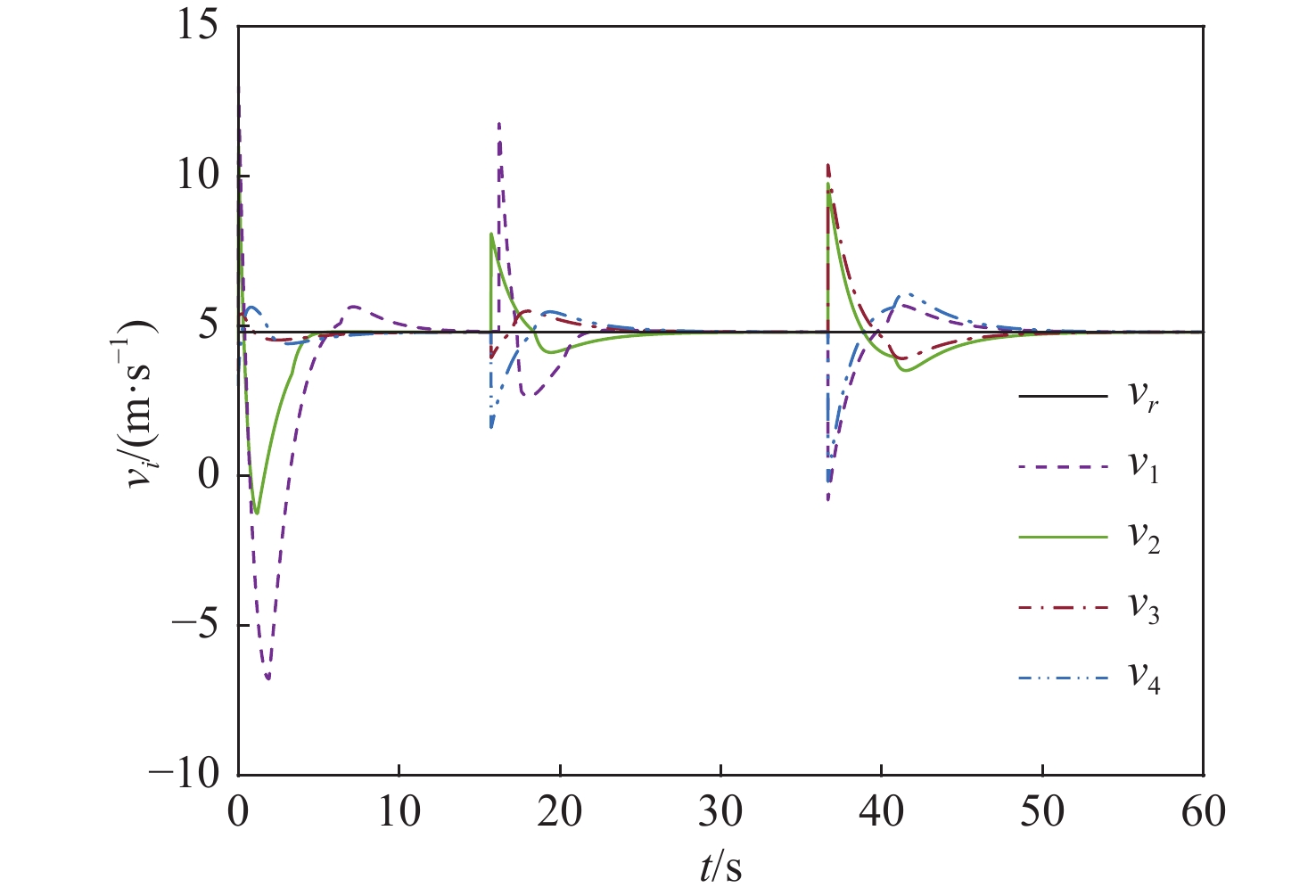
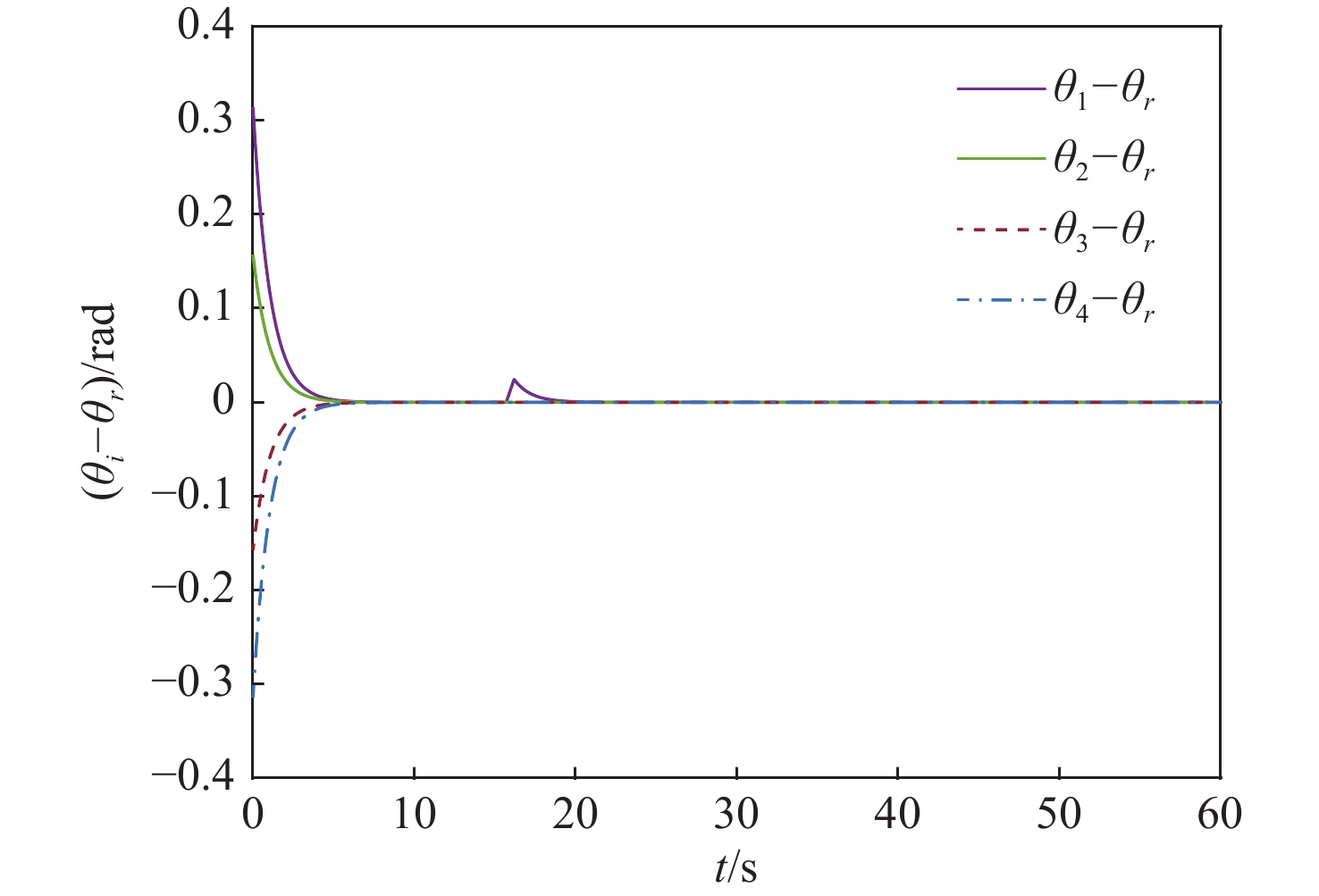
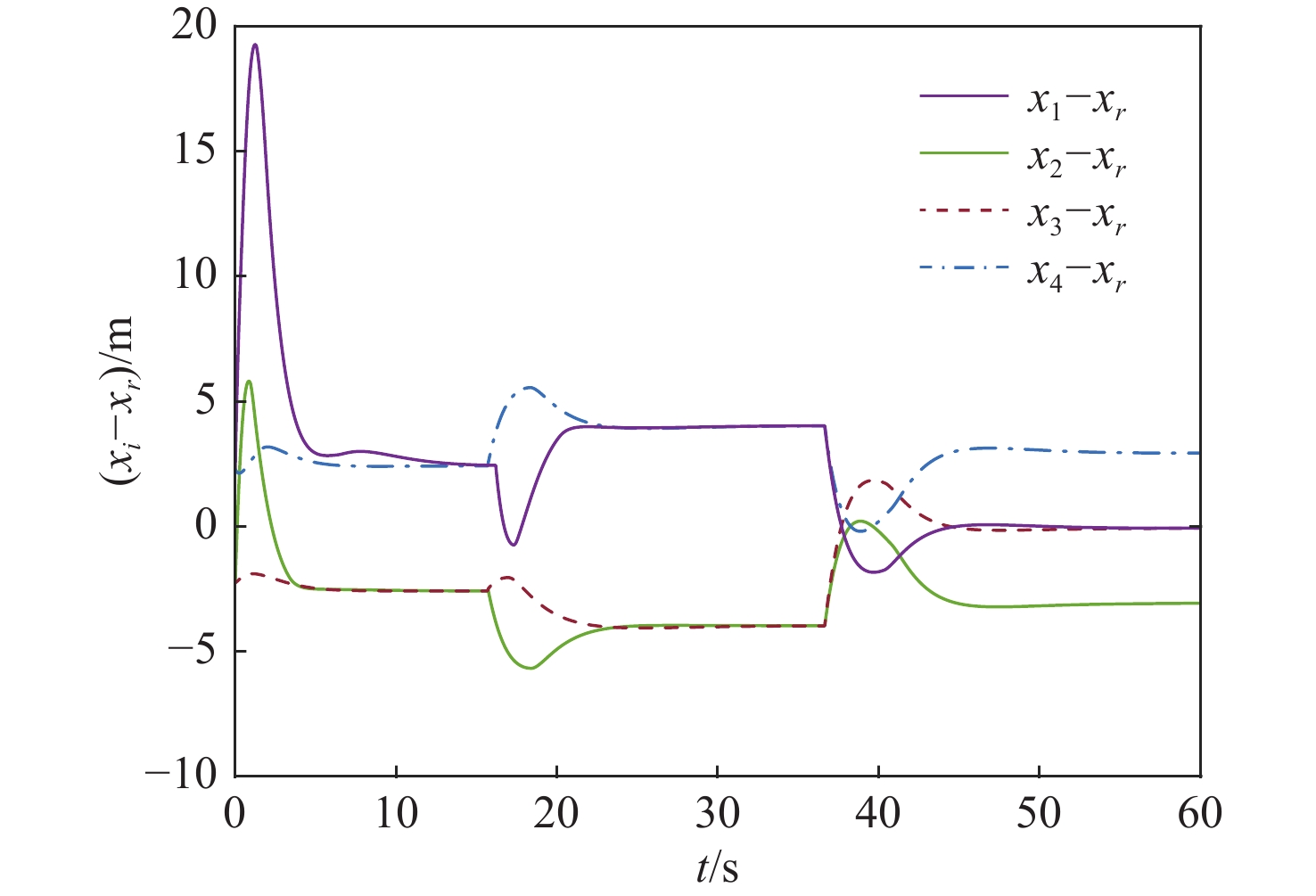
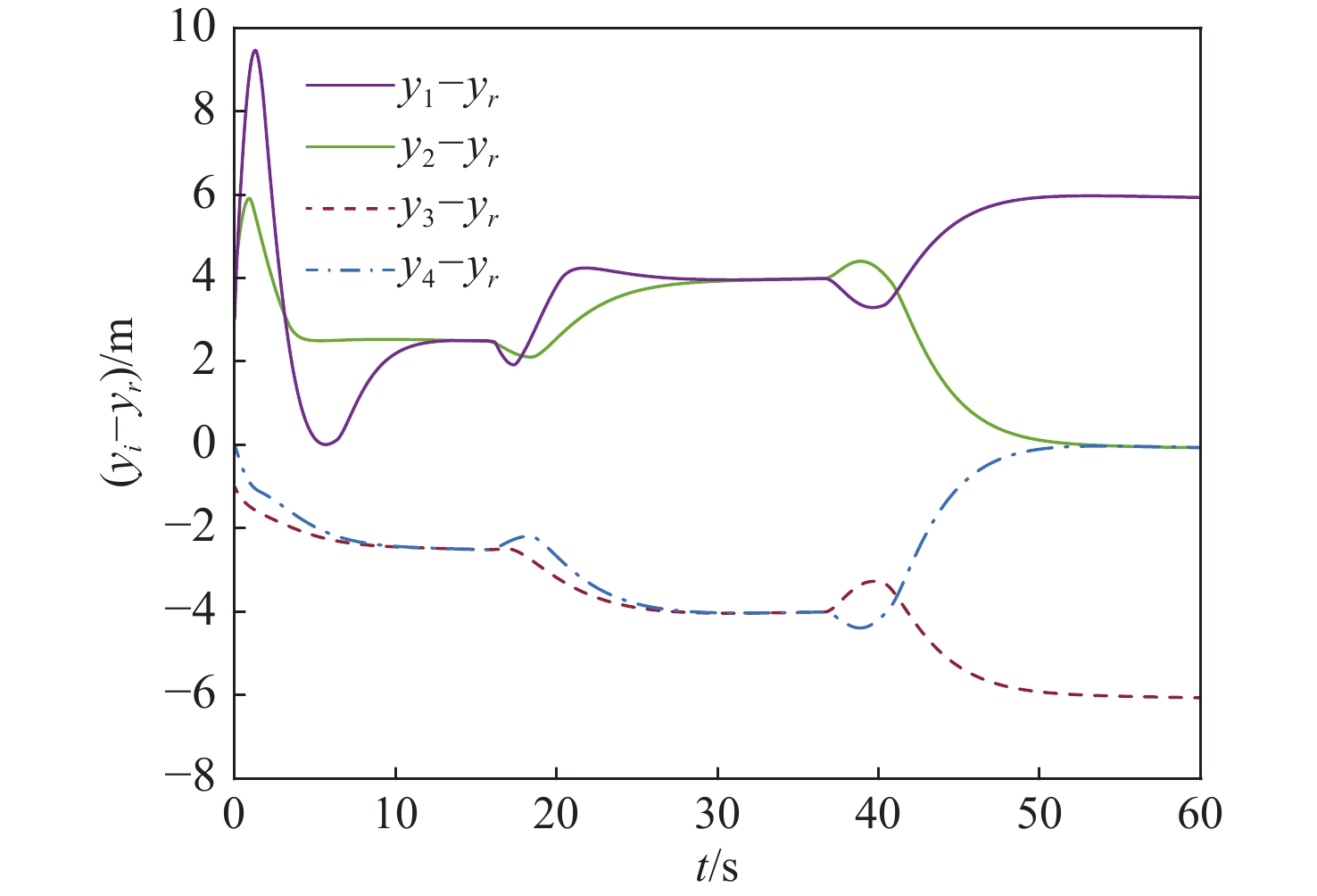
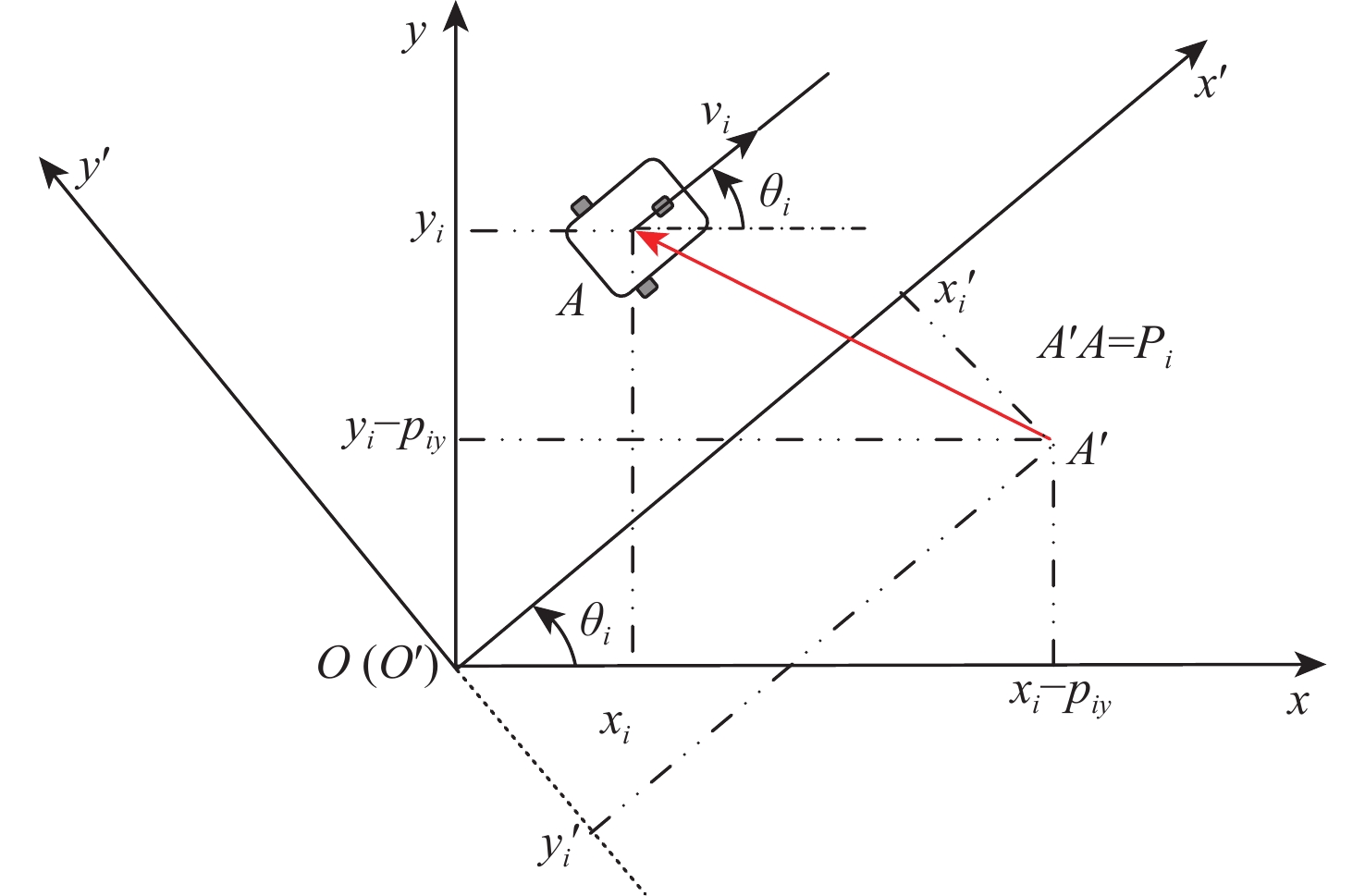
针对低通信负载下的多移动机器人编队控制进行研究。通过坐标变换和引入侧滑增量定义了非完整约束轮式移动机器人的运动学模型,显式满足纯滚动条件。提出领航编队控制策略,通过领航者对跟随者的单向通信和映射领航者规划,将系统编队问题转换为新模型下的分布式一致性控制问题。针对跟随者的转速与线速度设计了2级指数趋近滑模控制器,实现相对于领航者轨迹误差的快速收敛,并通过Lyapunov理论对控制器进行稳定性分析。数值仿真表明:所提策略可以满足多移动机器人队形保持和队形变换的任务要求,验证了理论分析的正确性和有效性。
Abstract:The formation control for multiple mobile robots under low communication load is investigated. A kinematics model of the nonholonomic constrained wheeled mobile robot is defined by coordinate transformation and the introduction of side slipping increment, which explicitly satisfies the pure rolling condition. By using the leader-follower strategy, system formation is converted into distributed consensus control under the new model through the one-way communication of leader to follower and the plan of a mapping leader. A two-stage exponential reaching sliding mode controller is designed for the angular and linear velocity of the follower to rapidly achieve convergence relative to the leader’s trajectory error, and the stability of the controller is then proved by Lyapunov theory. Numerical simulation studies show that the formation control strategy proposed in this paper can satisfy the task requirements of formation maintenance and formation transformation of multi-mobile robots, verifying the correctness and effectiveness of the theoretical analysis.
-
表 1 跟随机器人初始条件
Table 1. Initial conditions of followers
跟随
机器人$ i $位置坐标
$ ({x_i}(0),{y_i}(0)) $/m航向角
$ {\theta _i}(0) $/π rad速度
$ {v_i}(0) $/(m·s−1)角速度
$ {\omega _i}(0) $/(rad·s−1)1 (2.3,−21) 0.1 5 −0.1 2 (−2.25,−20) 0.05 4.5 0.05 3 (−2.25,−25) −0.05 3.5 0.35 4 (2.3,−24) −0.1 3 0.5  下载: 导出CSV
下载: 导出CSV
-
[1] MICHAEL R, ALEJANDRO C, RADHIKA N. Programmable self-assembly in a thousand-robot swarm[J]. Science, 2014, 345(6198): 795-799. doi: 10.1126/science.1254295 [2] RUAN W Y, DUAN H B. Multi-UAV obstacle avoidance control via multi-objective social learning pigeon-inspired optimization[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(5): 740-748. doi: 10.1631/FITEE.2000066 [3] 张婷婷, 蓝羽石, 宋爱国. 无人集群系统自主协同技术综述[J]. 指挥与控制学报, 2021, 7(2): 127-136.ZHANG T T, LAN Y S, SONG A G. An overview of autonomous collaboration technologies for unmanned swarm systems[J]. Journal of Command and Control, 2021, 7(2): 127-136(in Chinese). [4] LORIA A, DASDEMIR J, ALVAREZ J N. Leader–follower formation and tracking control of mobile robots along straight paths[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 727-732. doi: 10.1109/TCST.2015.2437328 [5] 刘安东, 秦冬冬. 基于虚拟结构法的多移动机器人分布式预测控制[J]. 控制与决策, 2021, 36(5): 1273-1280.LIU A D, QIN D D. Distributed predictive control of multiple mobile robots based on virtual structure method[J]. Control and Decision, 2021, 36(5): 1273-1280(in Chinese). [6] LEE G, CHWA D. Decentralized behavior-based formation control of multiple robots considering obstacle avoidance[J]. Intelligent Service Robotics, 2018, 11(1): 127-138. doi: 10.1007/s11370-017-0240-y [7] MATOUI F, BOUSSAID B, ABDELKRIM M N. Distributed path planning of a multi-robot system based on the neighborhood artificial potential field approach[J]. Simulation, 2019, 95(7): 637-657. doi: 10.1177/0037549718785440 [8] 胡凯, 陈旭, 杨平化, 等. 基于滑模变结构控制多机器人协同编队的研究综述[J]. 南京信息工程大学学报(自然科学版), 2022, 14(2): 197-211.HU K, CHEN X, YANG P H, et al. A review of cooperative formation of multiple robots based on sliding mode variable structure control[J]. Journal of Nanjing University of Information Science & Technology(Natural Science Edition), 2022, 14(2): 197-211(in Chinese). [9] PERRUQUETTI W, BARBOT J P. Sliding mode control in engineering[M]. New York: Marcel Dekker, 2002. [10] SLOTINE J J, SASTRY S S. Tracking control of non-linear systems using sliding surfaces with application to robot manipulators[J]. International Journal of Control, 1983, 38(2): 465-492. doi: 10.1080/00207178308933088 [11] UTKIN V I, DRAKUNOV S V, HASHIMOTO H, et al. Robot path obstacle avoidance control via sliding mode approach[C] // IEEE/RSJ International Workshop on Intelligent Robots and Systems. Piscataway: IEEE Press, 1991: 1287-1290. [12] 林洁琼, 杨雪梅, 闫东, 等. 一种改进的双幂次指数趋近律的滑模变结构控制策略[J]. 长春工业大学学报, 2021, 42(3): 193-199.LIN J Q, YANG X M, YAN D, et al. An improved sliding mode variable structure control strategy for double power exponential approach law[J]. Journal of Changchun University of Technology, 2021, 42(3): 193-199(in Chinese). [13] DESAI J P, OSTROWSKI J P, KUMAR V. Modeling and control of formations of nonholonomic mobile robots[J]. IEEE Transactions on Robotics and Automation, 2001, 17(6): 905-908. doi: 10.1109/70.976023 [14] DONG W. Tracking control of multiple-wheeled mobile robots with limited information of a desired trajectory[J]. IEEE Transactions on Robotics, 2012, 28(1): 262-268. doi: 10.1109/TRO.2011.2166436 [15] 易国, 毛建旭, 王耀南, 等. 非完整移动机器人领航-跟随编队分布式控制[J]. 仪器仪表学报, 2017, 38(9): 2266-2272.YI G, MAO J X, WANG Y N, et al. Distributed control for leader-follower formation tracking of multiple nonholonomic vehicles[J]. Chinese Journal of Scientific Instrument, 2017, 38(9): 2266-2272(in Chinese). [16] 苏博, 王洪斌, 高静. 事件触发策略下多AUV抗干扰固定时间编队控制[J]. 控制理论与应用, 2021, 38(7): 1113-1123.SU B, WANG H B, GAO J. Anti-disturbance fixed-time formation control of multi-AUVs via event-triggered strategy[J]. Control Theory & Applications, 2021, 38(7): 1113-1123(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 496
- HTML全文浏览量: 35
- PDF下载量: 18
- 被引次数: 0
