



Fading memory variational Bayesian adaptive filter based on variable attenuating factor
-
摘要:
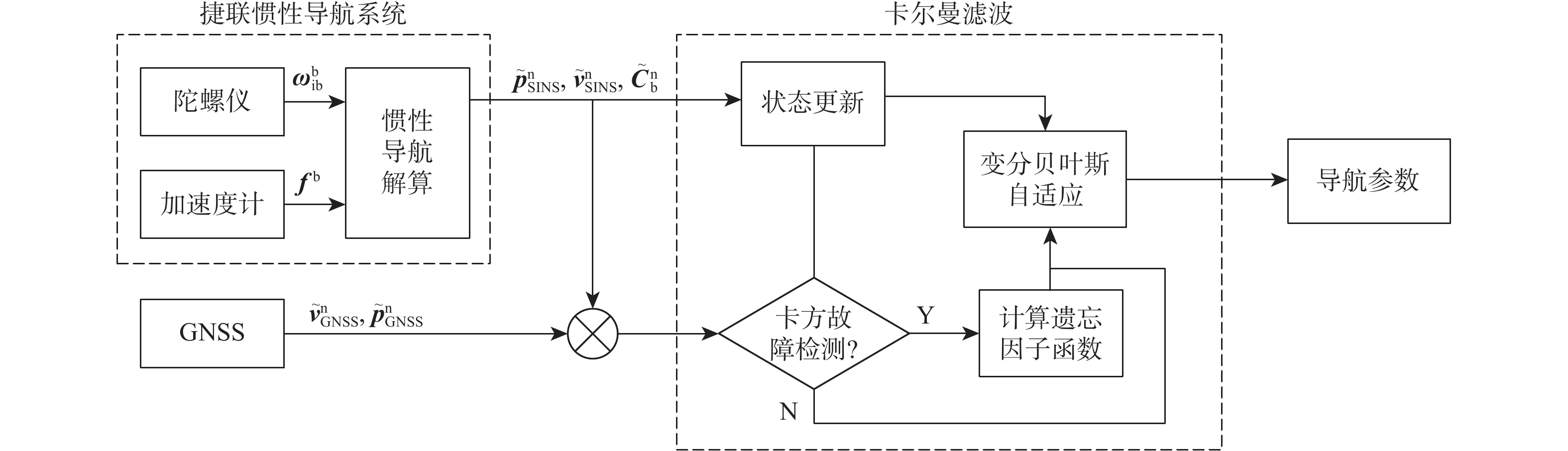
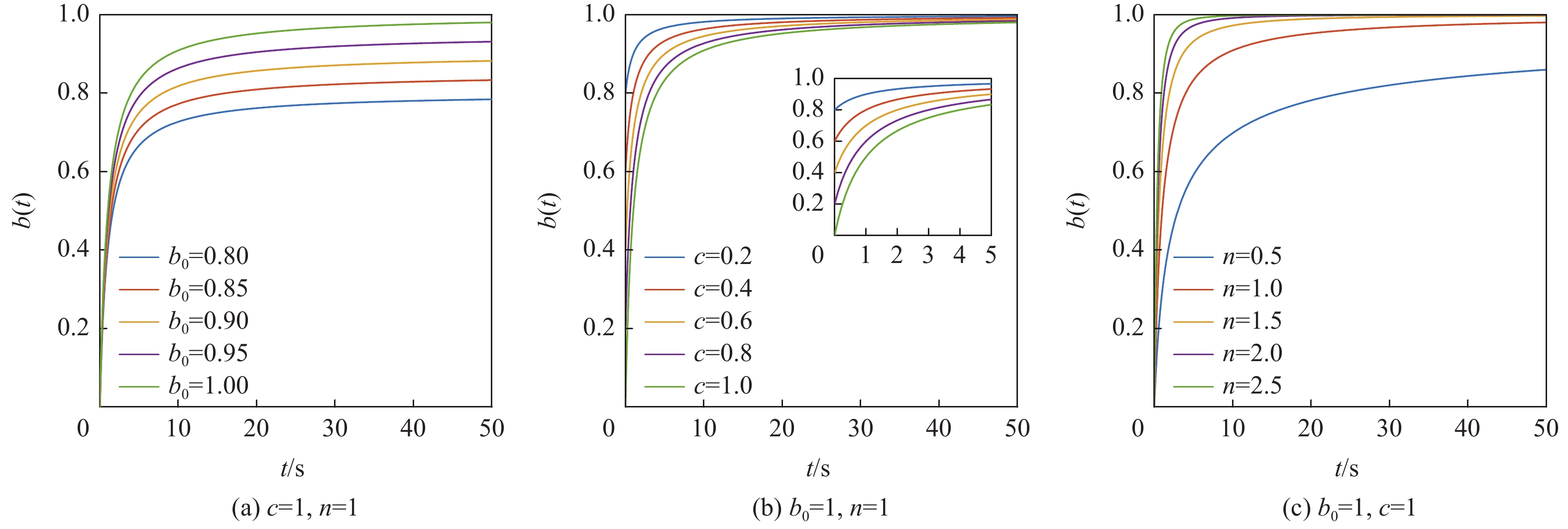
针对全球卫星导航系统/捷联惯性导航系统(GNSS/SINS)组合导航中GNSS信号易受干扰,造成量测噪声突变的问题,提出一种基于可变遗忘因子的渐消记忆变分贝叶斯自适应Kalman滤波(VBAKF)算法。针对自适应滤波中突变噪声难以准确探测,构建基于初值的噪声突变检验准则;为解决自适应滤波估计突变噪声的拖尾现象,将变分贝叶斯自适应滤波的超参数传递结构转化为协方差阵修正结构,通过构造可变遗忘因子函数动态调节自适应滤波中的遗忘因子。仿真和实测数据表明:所提算法可在GNSS/SINS噪声突变时快速估计量测噪声,提高组合导航精度。
Abstract:The measurement noise for global navigation satellite system/strapdown inertial navigation system (GNSS/SINS) suffers from abrupt changes due to the easy interference of GNSS signals. In this paper, a novel fading memory variational Bayesian adaptive Kalman filter (VBAKF) with variable attenuating factors is proposed to estimate the abrupt measurement noise for GNSS/SINS system. The Chi-square detection method is reconstructed by initial standard deviation of GNSS noise. The hyperparameter transfer structure of VBAKF is then transformed into the error covariance matrix correction structure, and a novel variable memorial factor function is established to dynamically adjust the attenuating factor in VBAKF. Experimental results show that the proposed algorithm can adaptively estimate the abrupt measurement noise, and that the position accuracy of GNSS/SINS is improved in the presence of abrupt noise.
-
Key words:
- variational Bayes /
- adaptive Kalman filter /
- attenuating factor /
- fading memory /
- integrated navigation
-
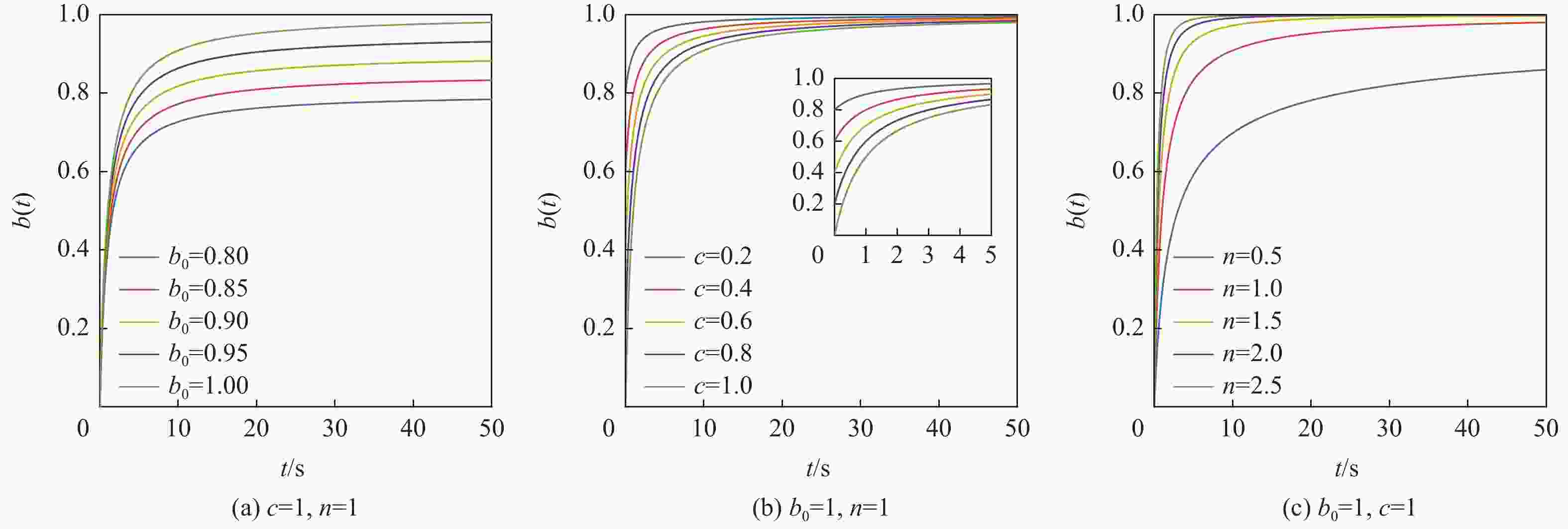
图 1 不同参数对遗忘因子函数的影响
Figure 1. Influence of different parameters on attenuating factor function
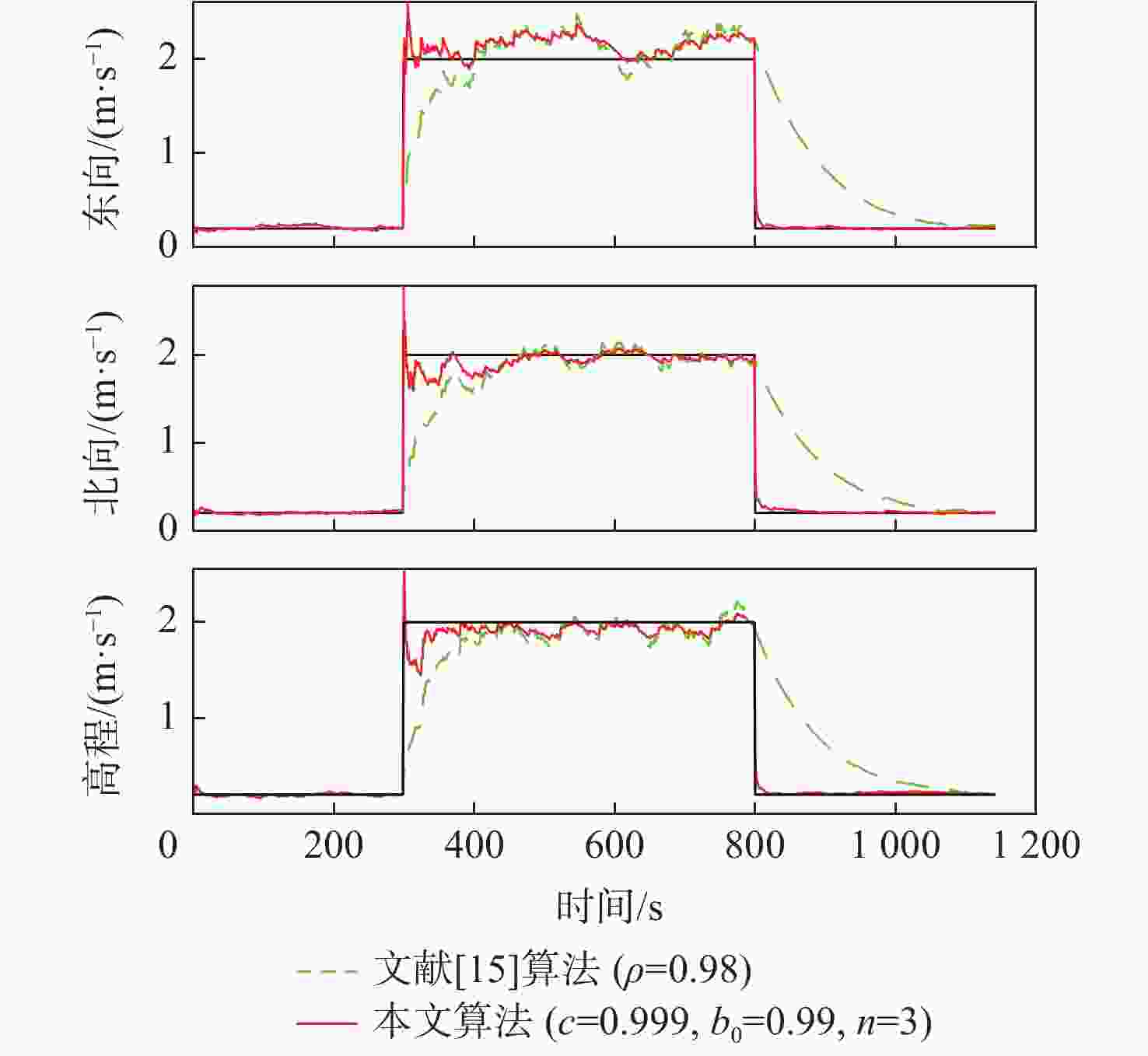
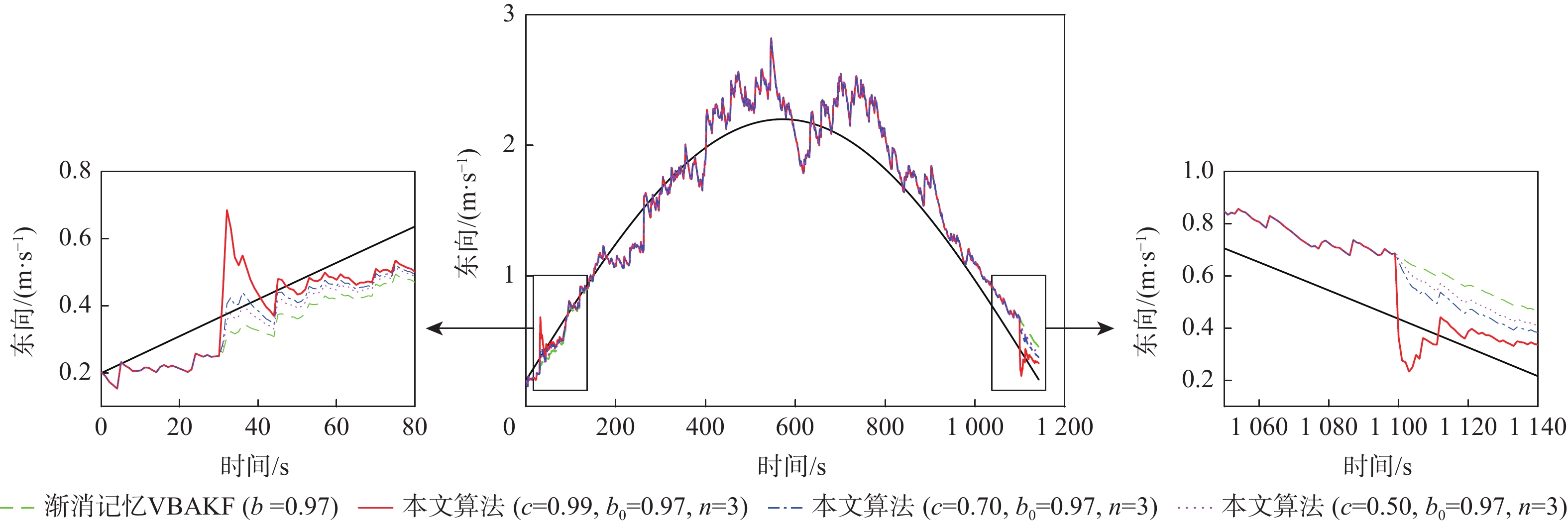
图 9 突变测速量测噪声跟踪结果对比
Figure 9. Comparison of noise tracking results of abrupt velocity measurement
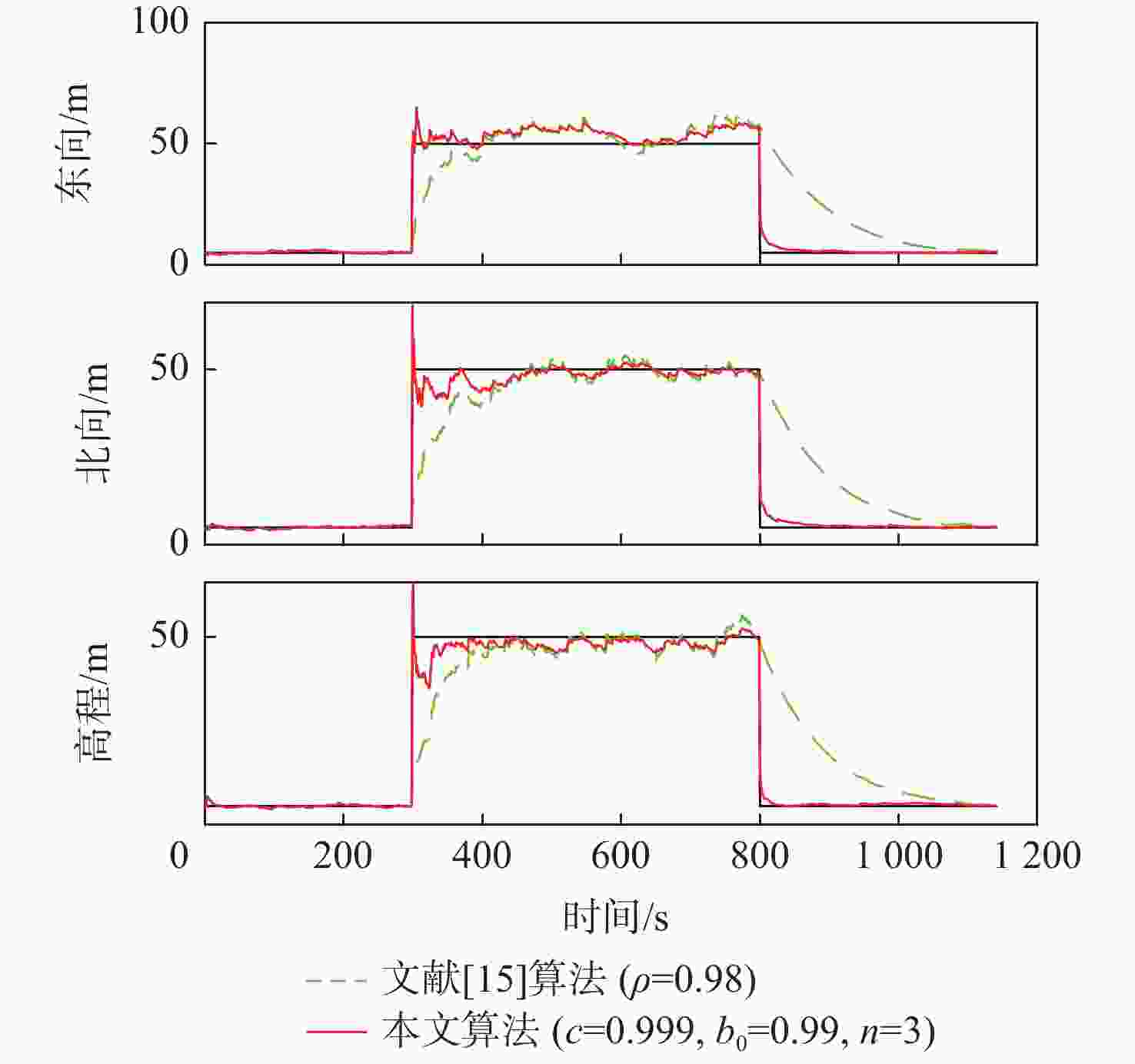
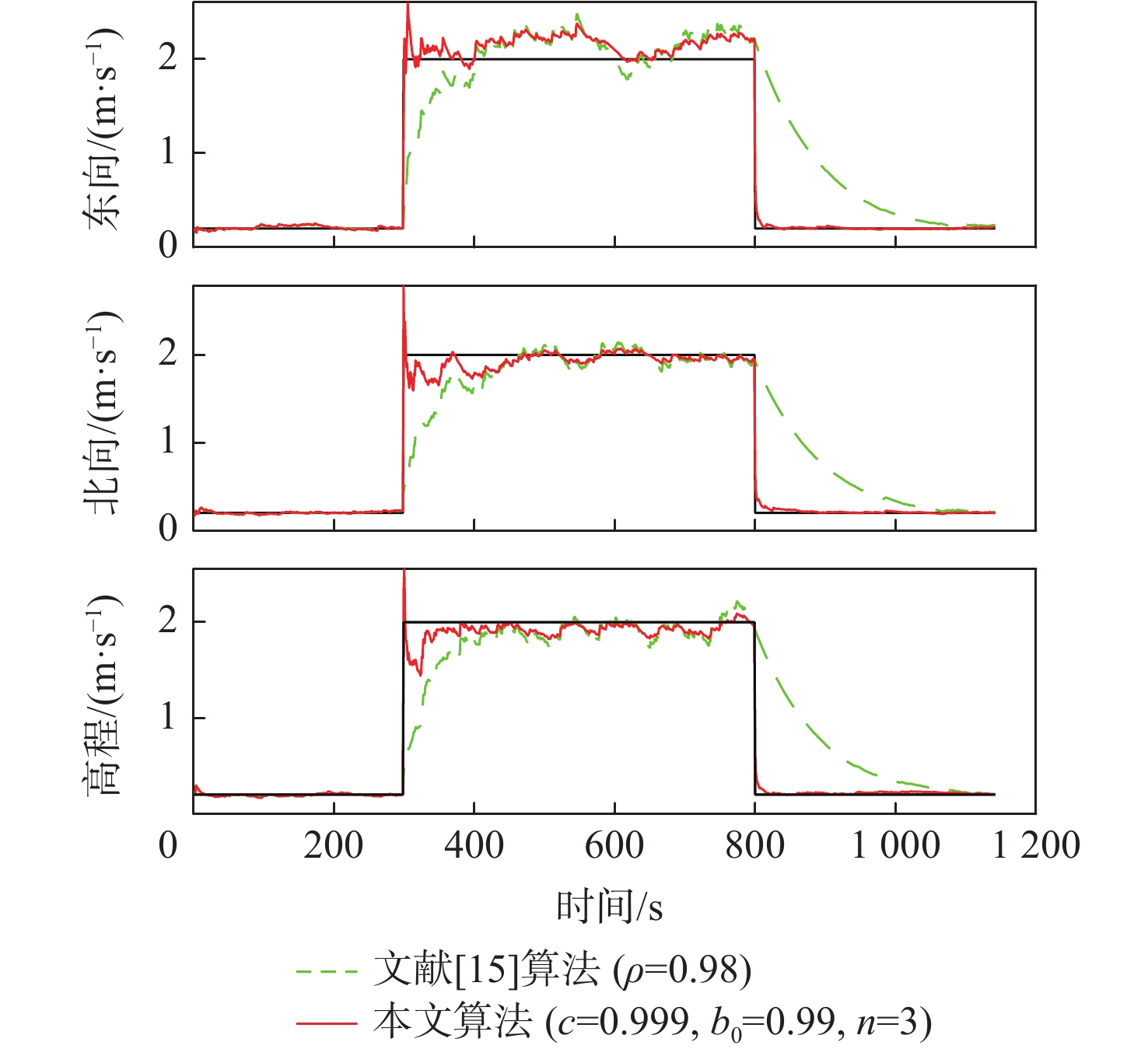
图 10 突变定位量测噪声跟踪结果对比
Figure 10. Comparison of noise tracking results of abrupt position measurement
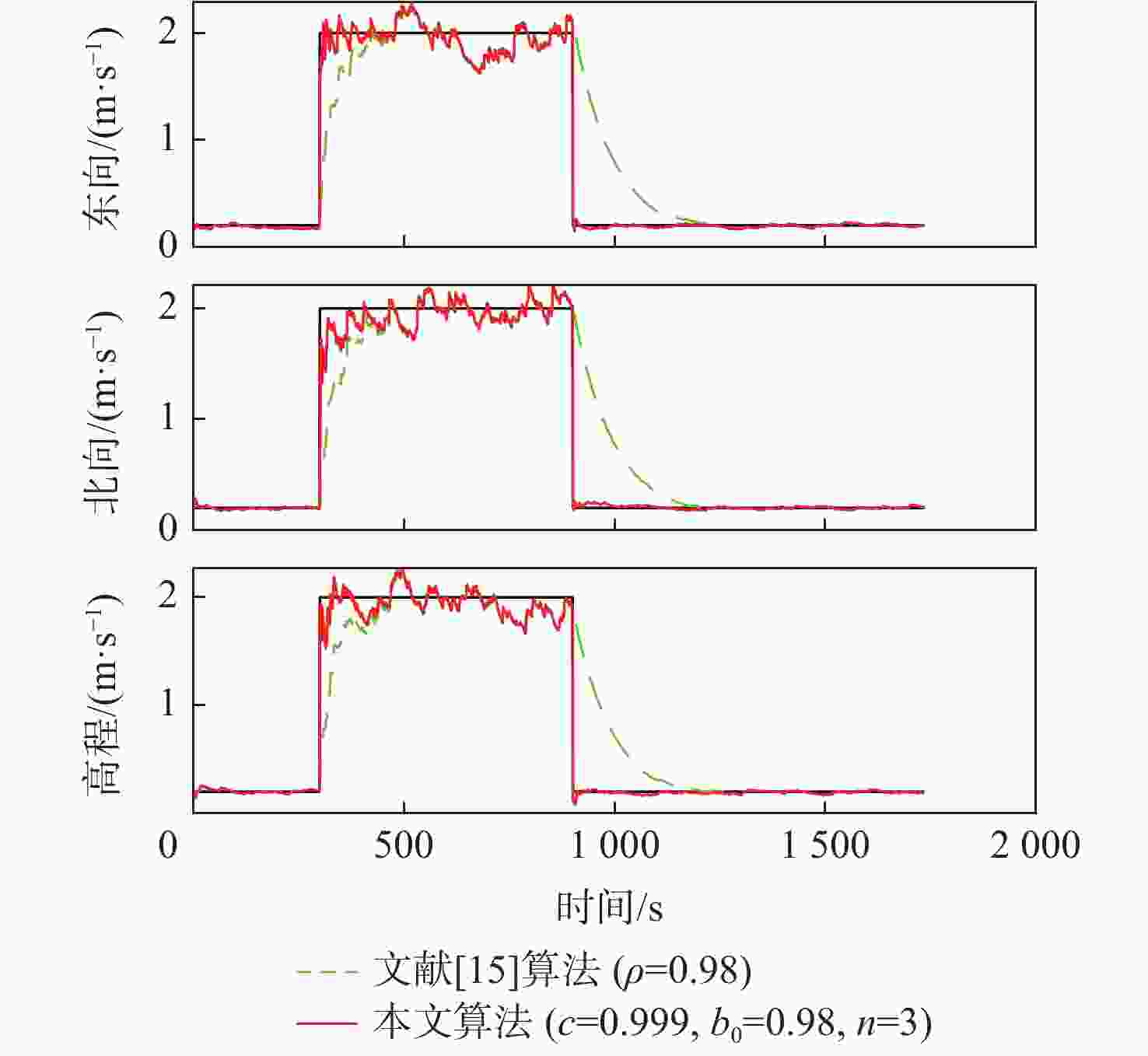
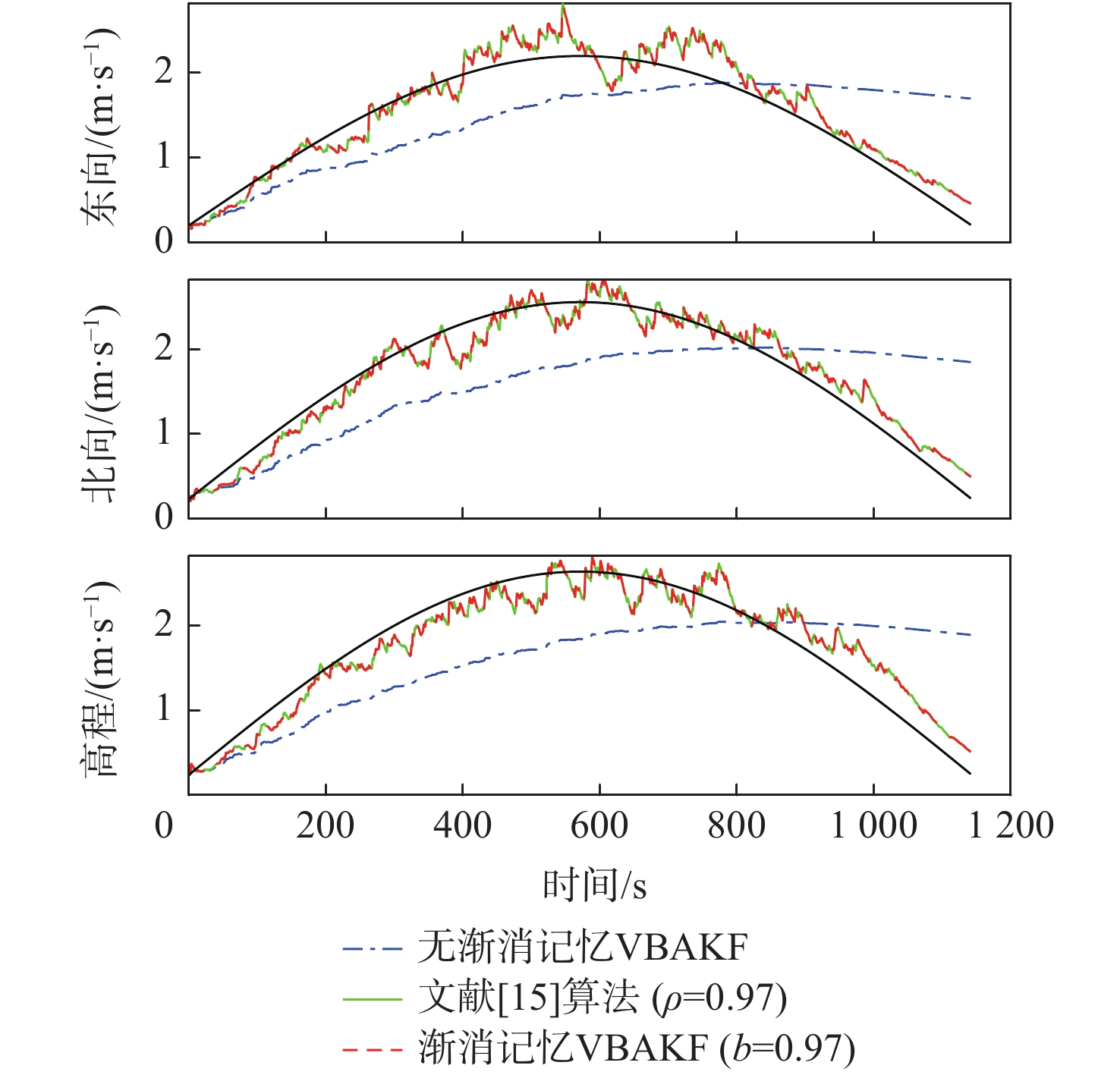
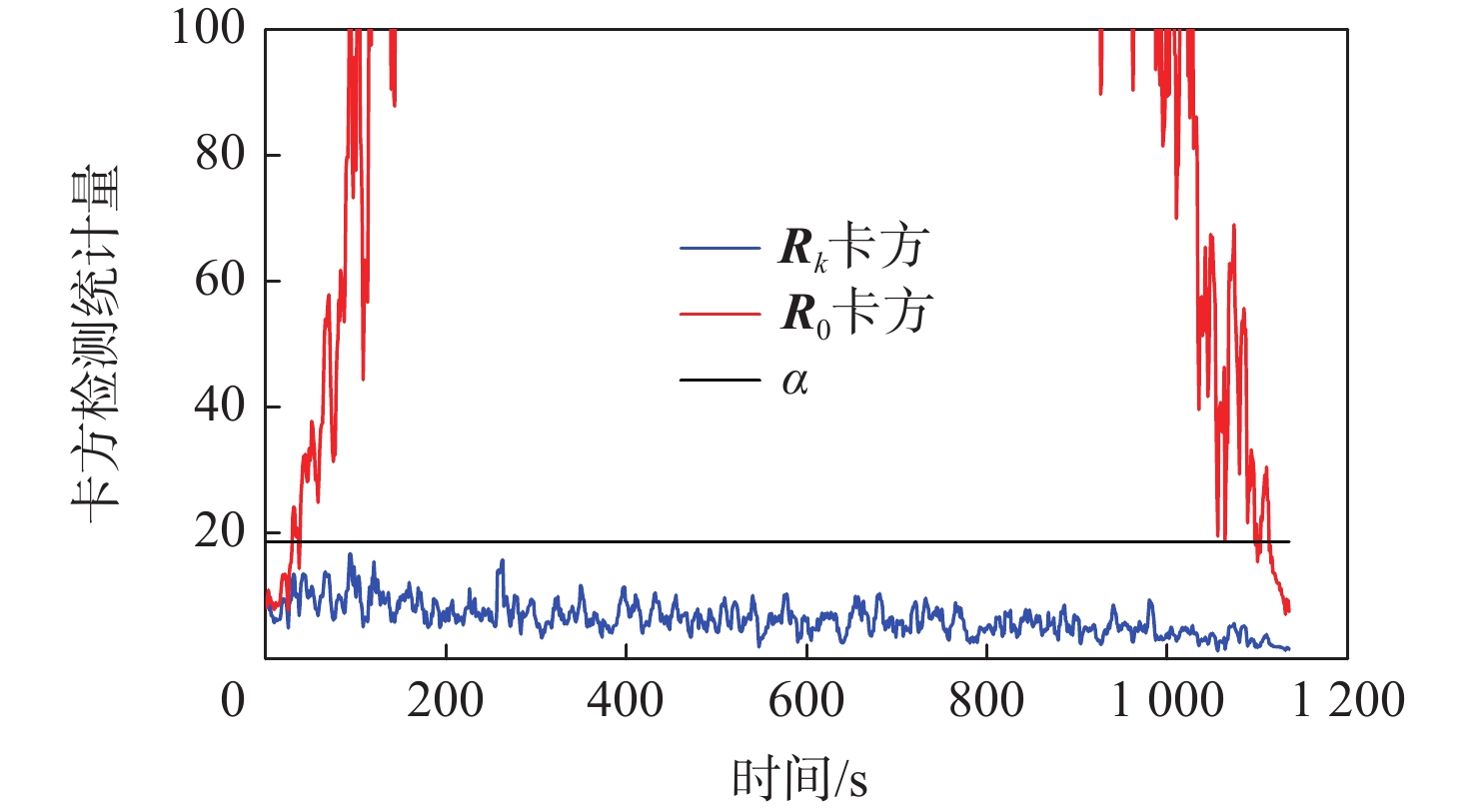
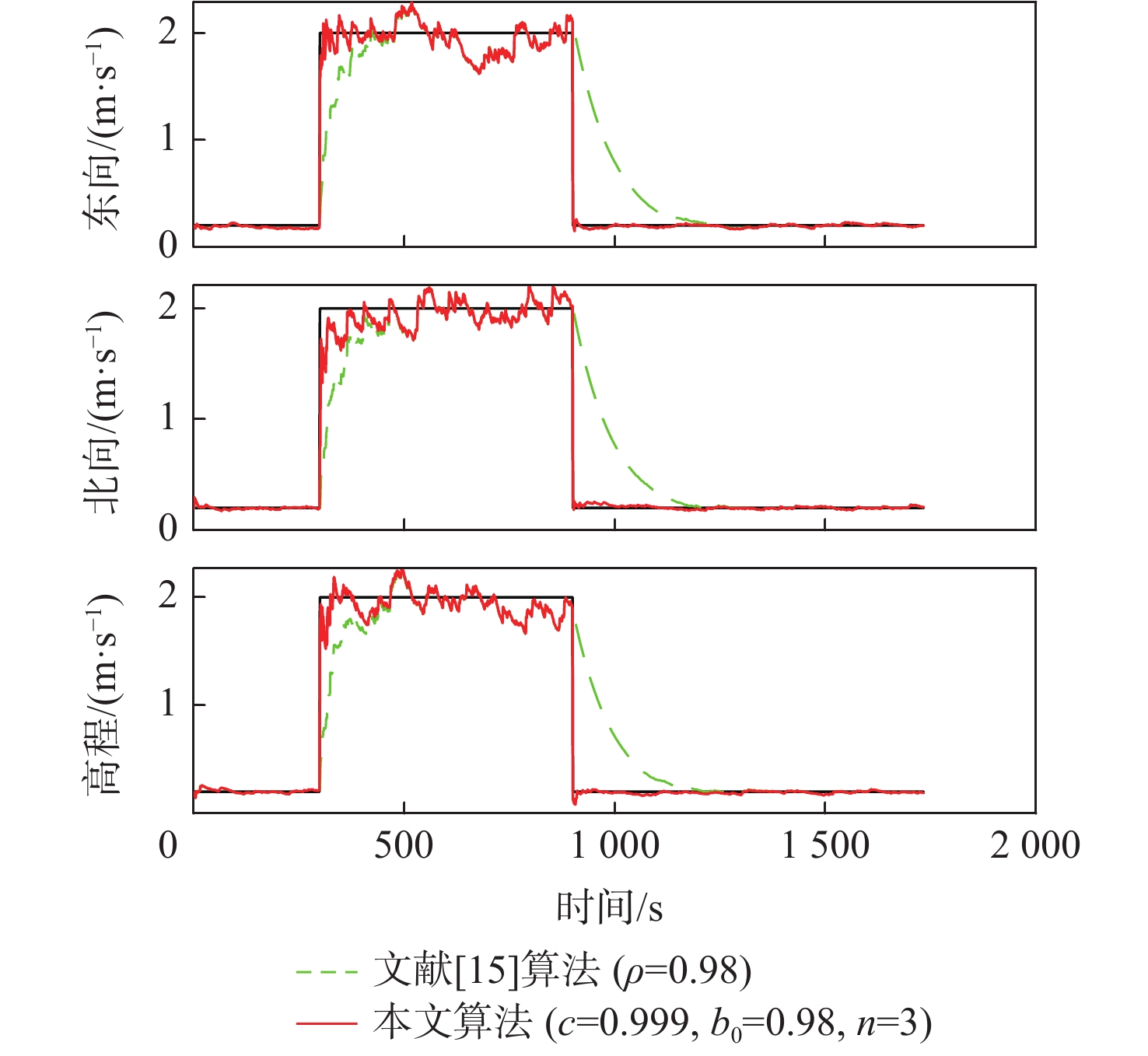
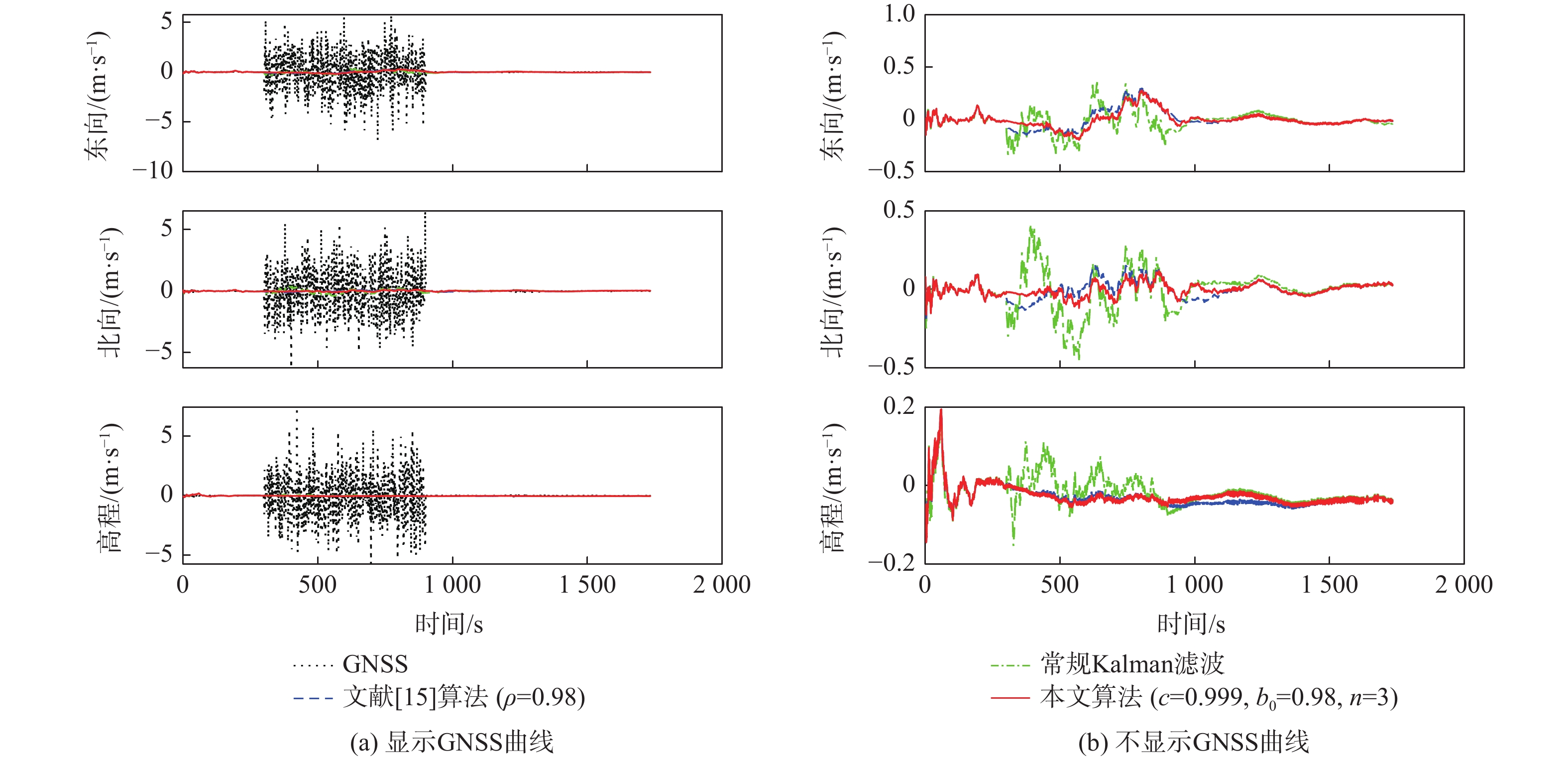
图 18 实测数据突变测速噪声跟踪结果对比
Figure 18. Comparison of tracking results of abrupt velocity noise of measured data

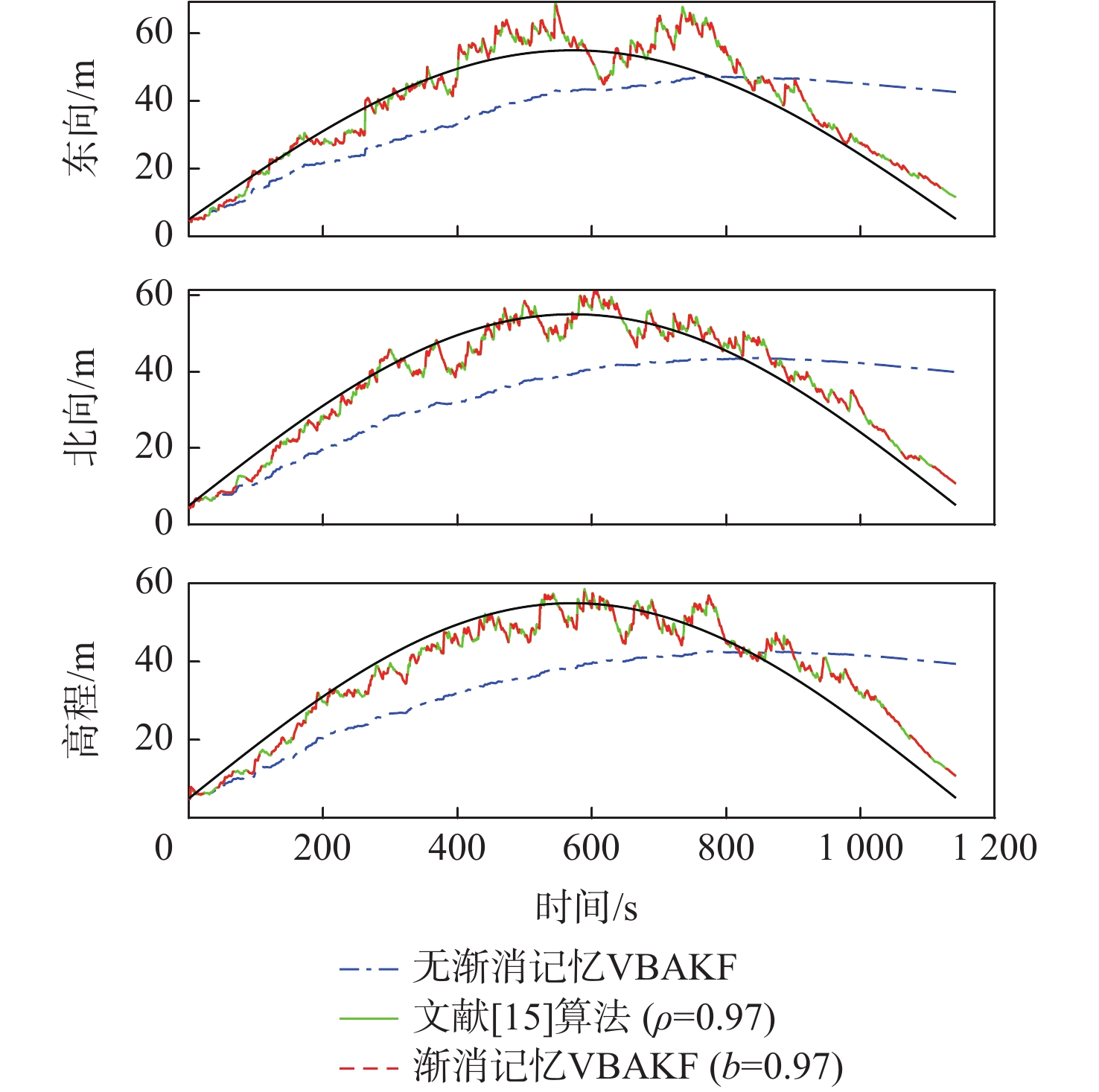
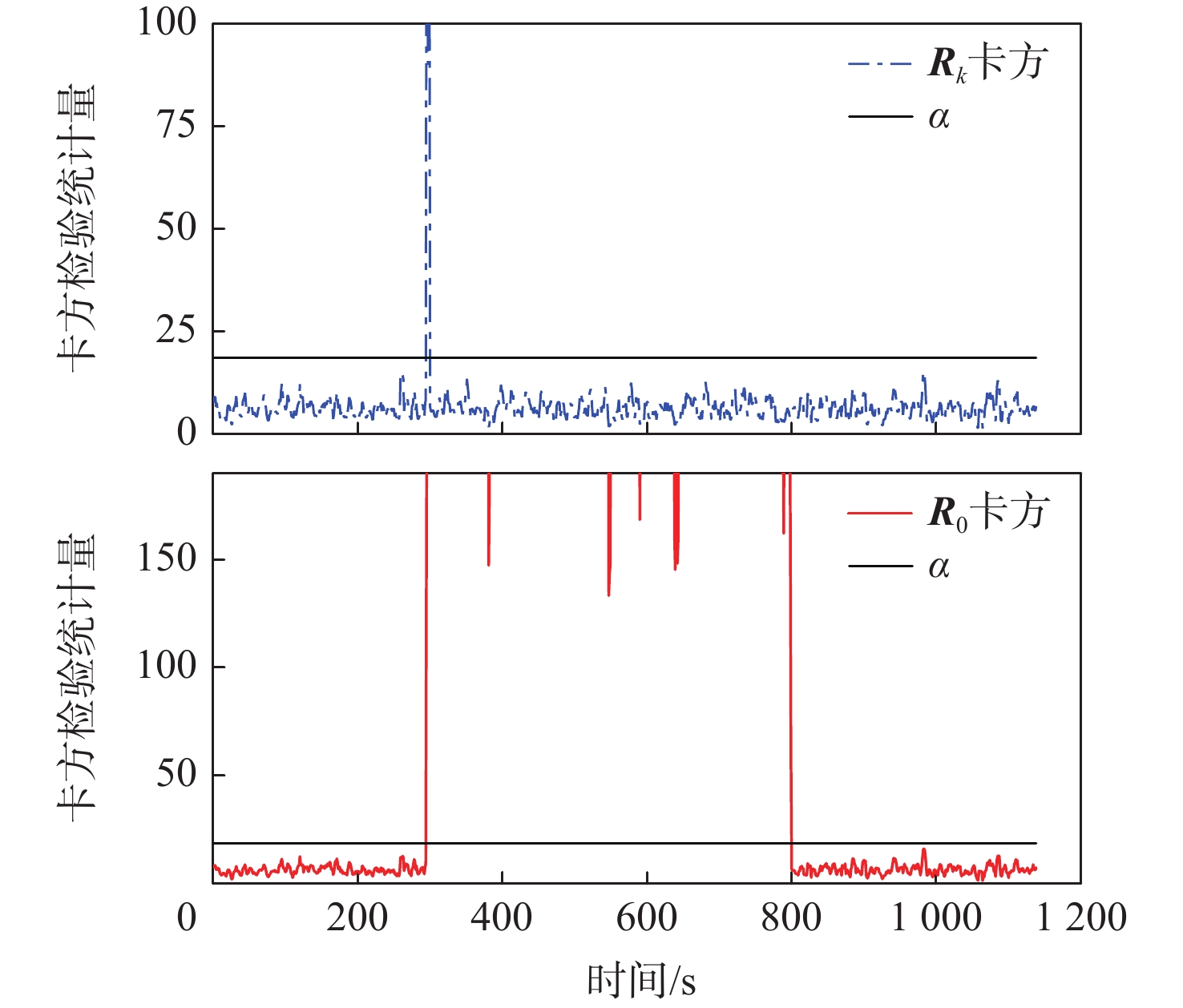
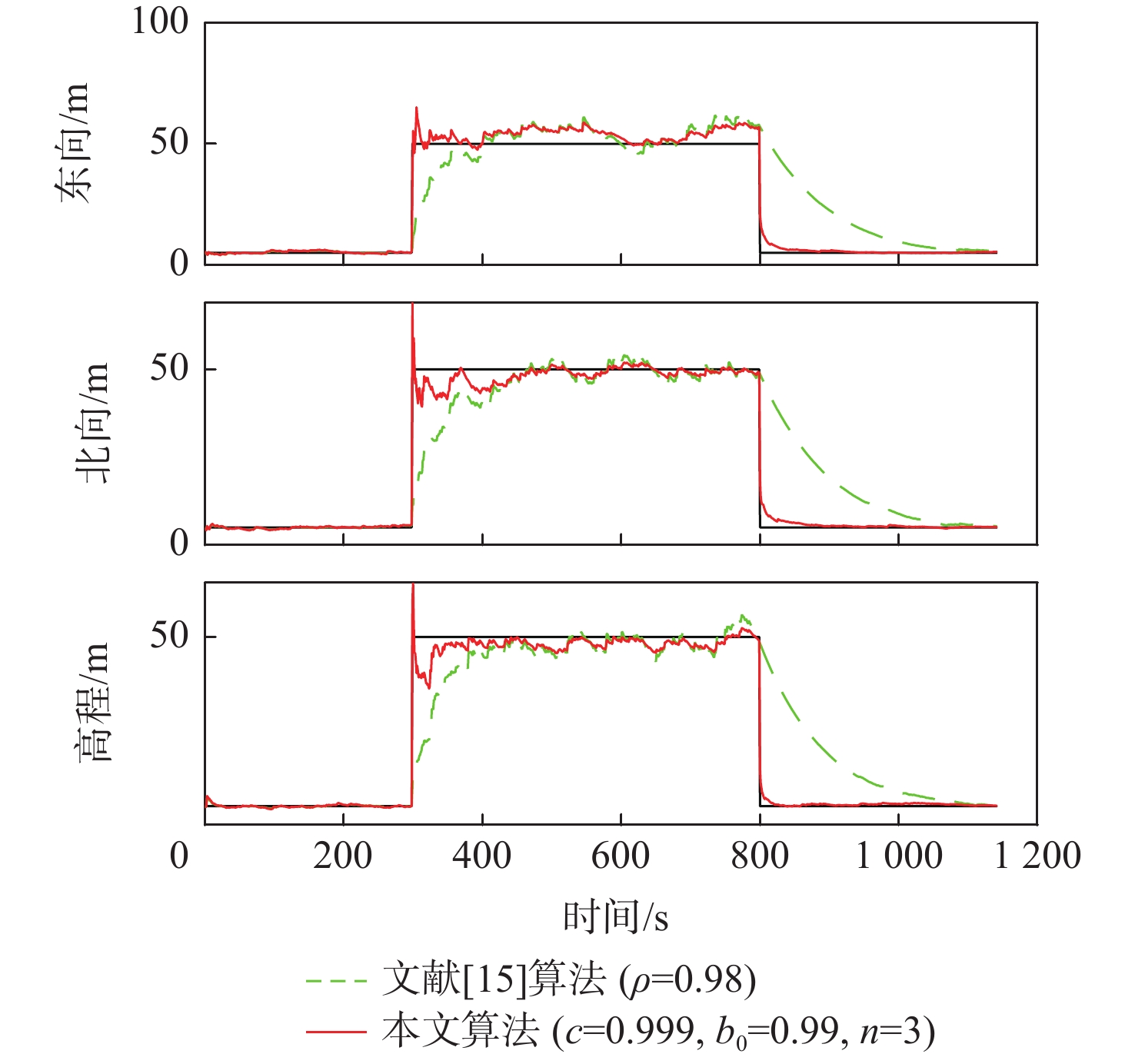
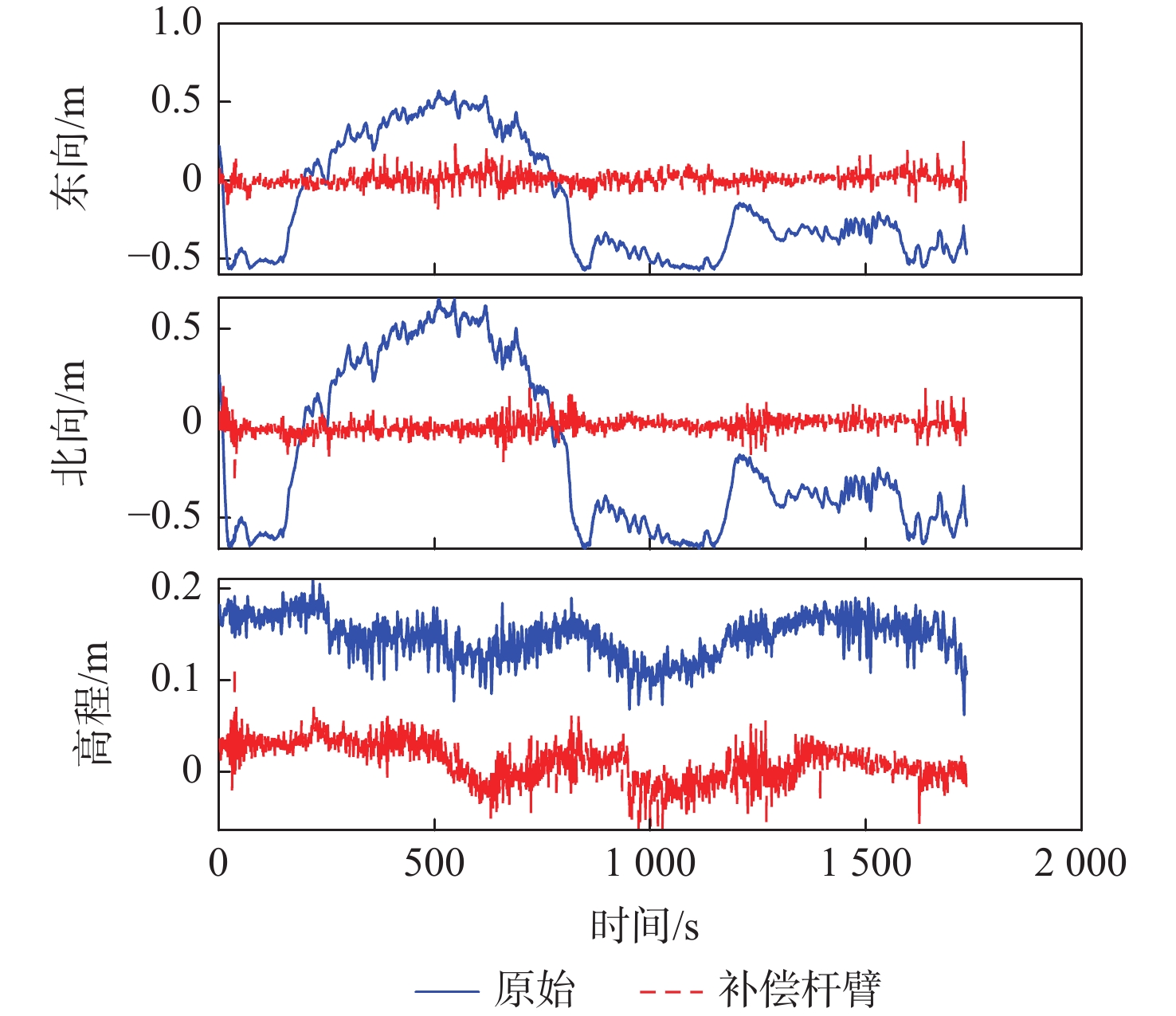
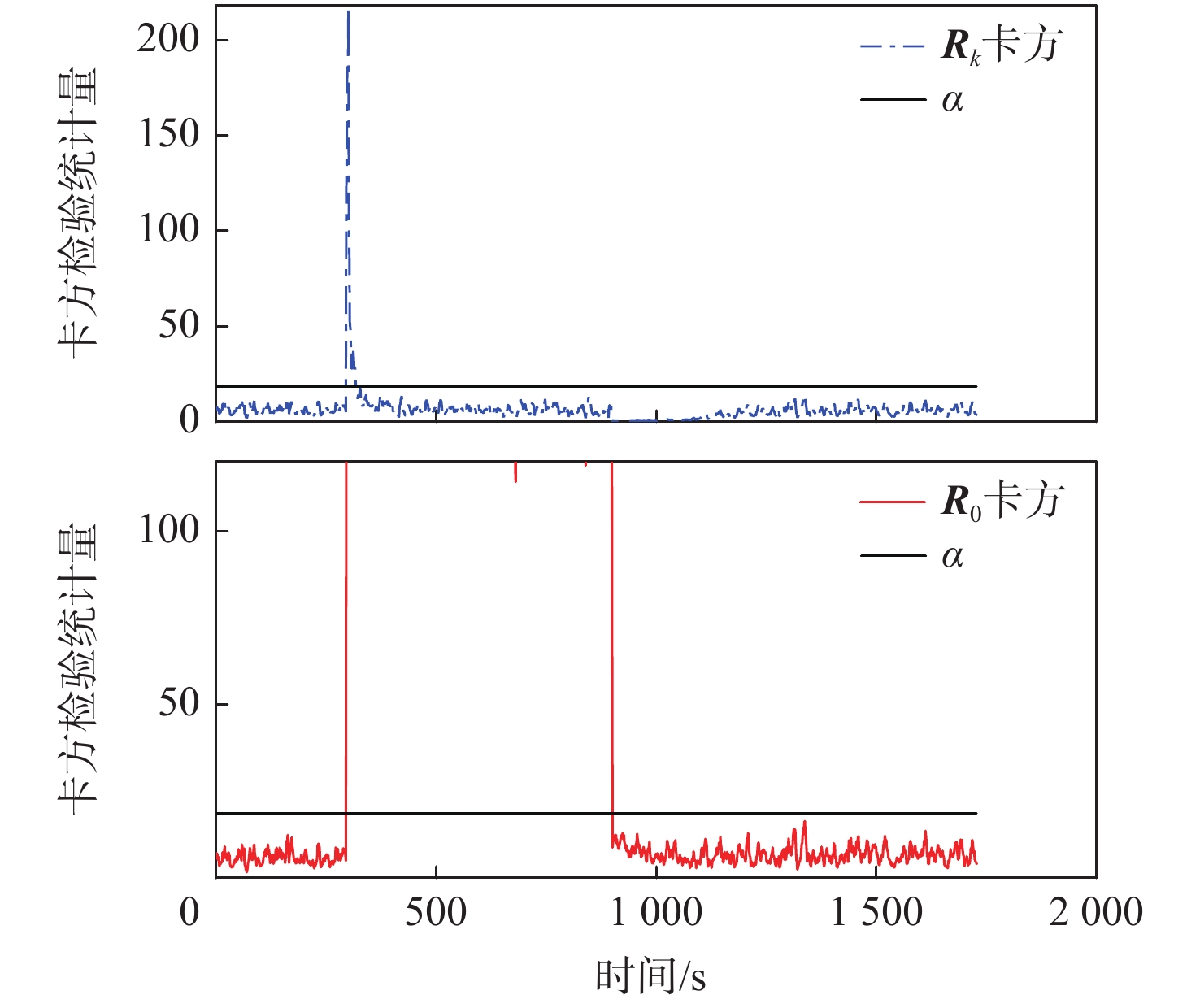
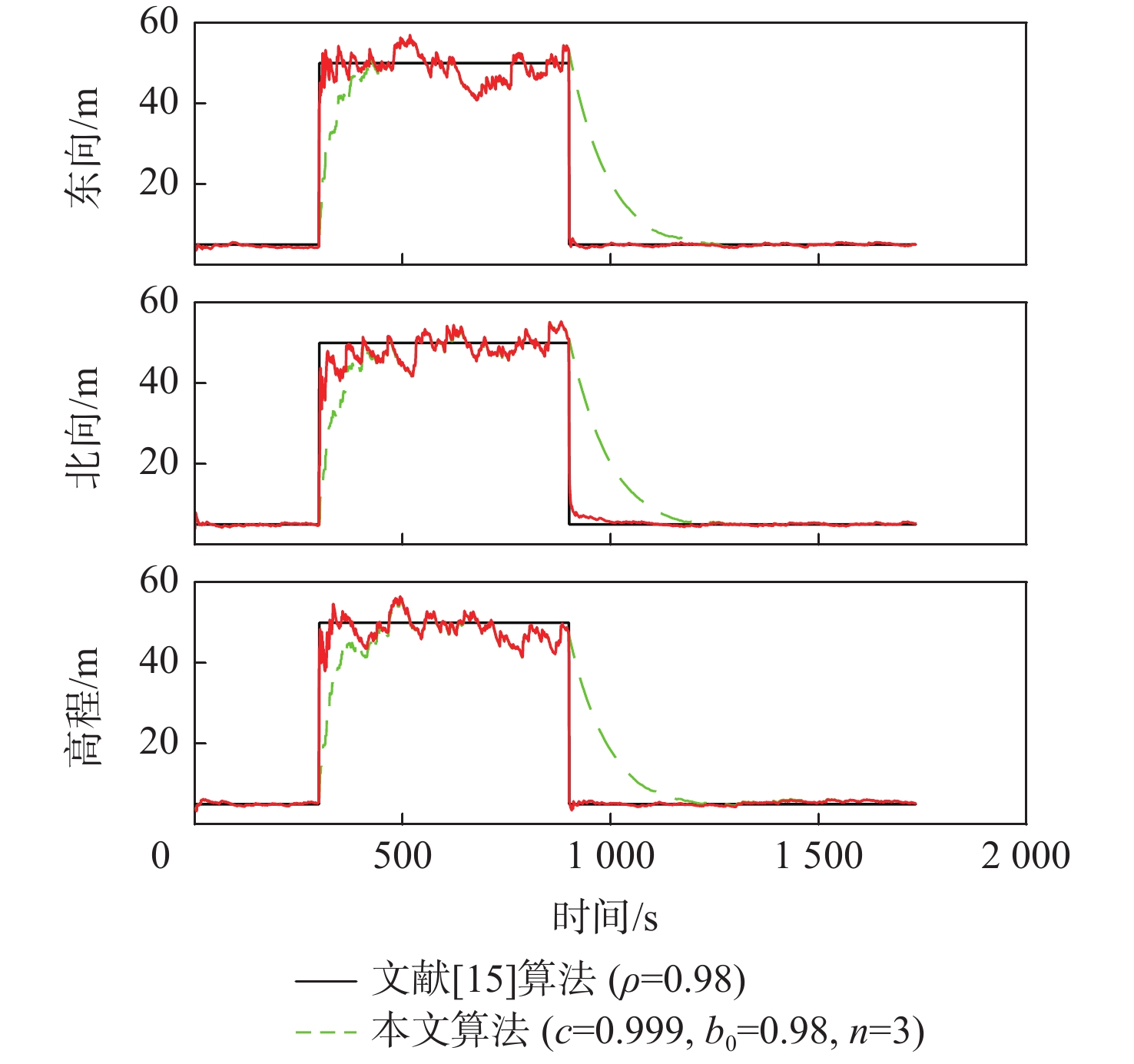
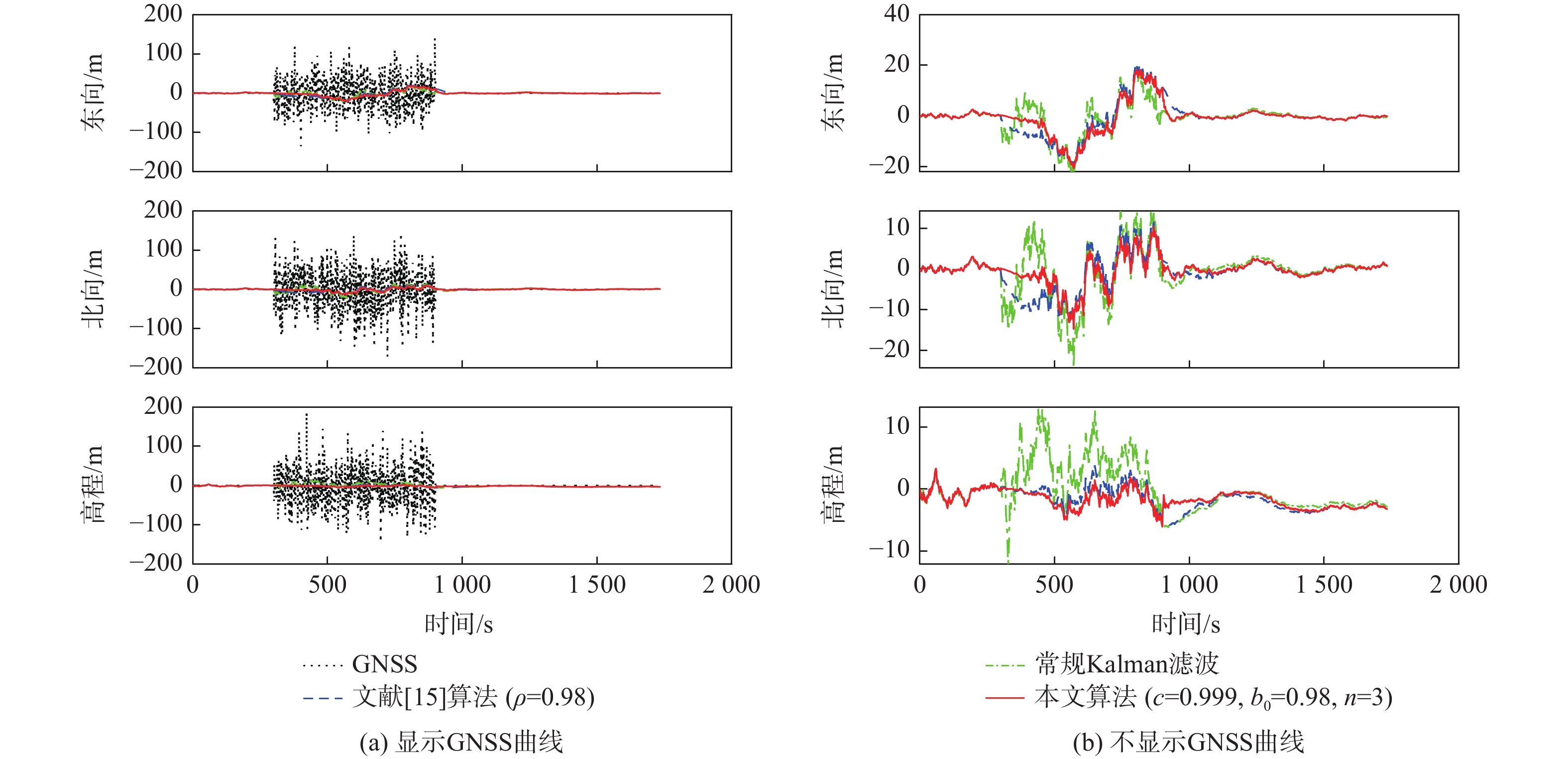
图 19 实测数据突变定位噪声跟踪结果对比
Figure 19. Comparison of tracking results of abrupt positioning noise of measured data

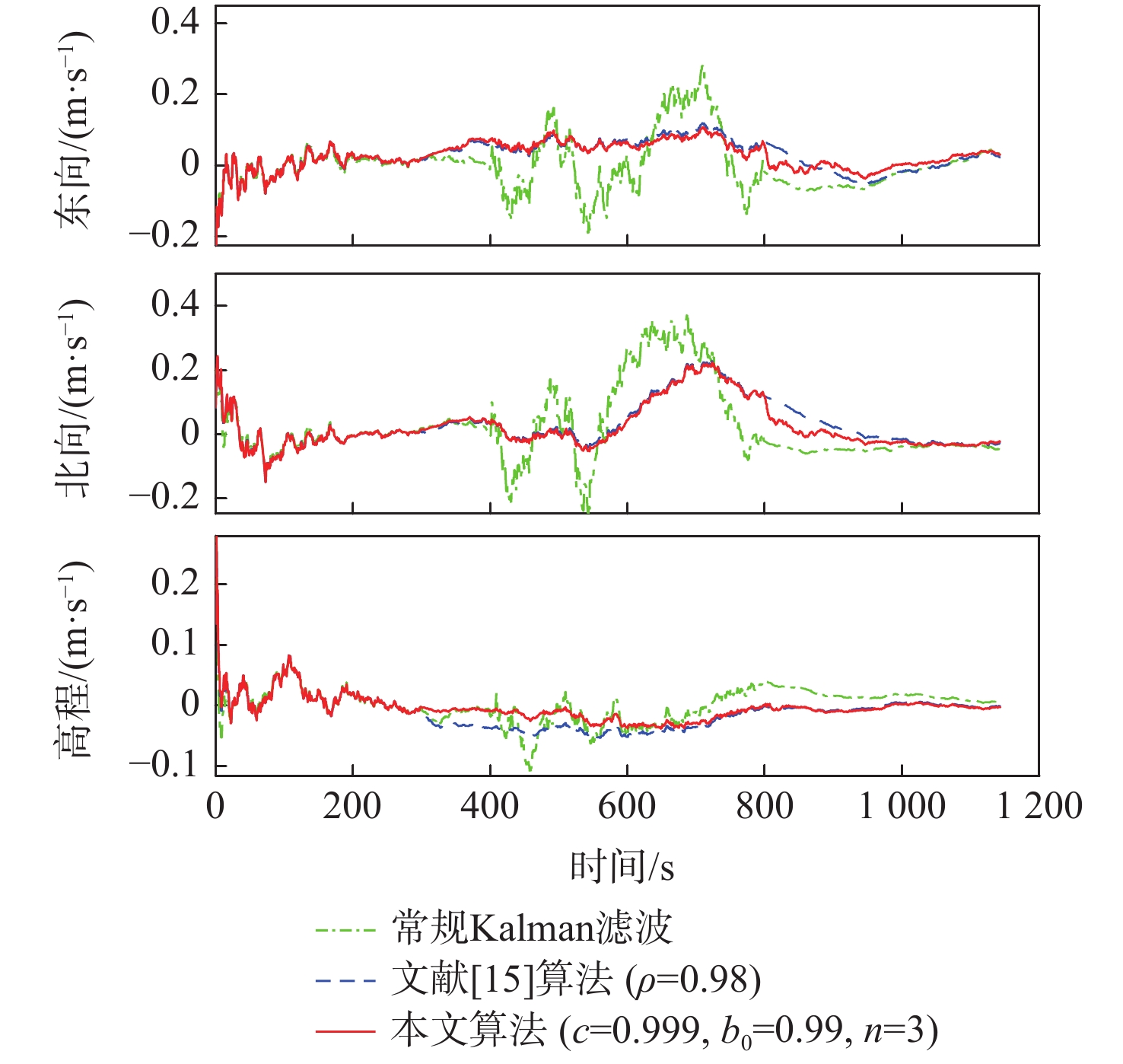
图 20 实测数据组合导航速度误差对比
Figure 20. Comparison of navigation velocity error with measured data

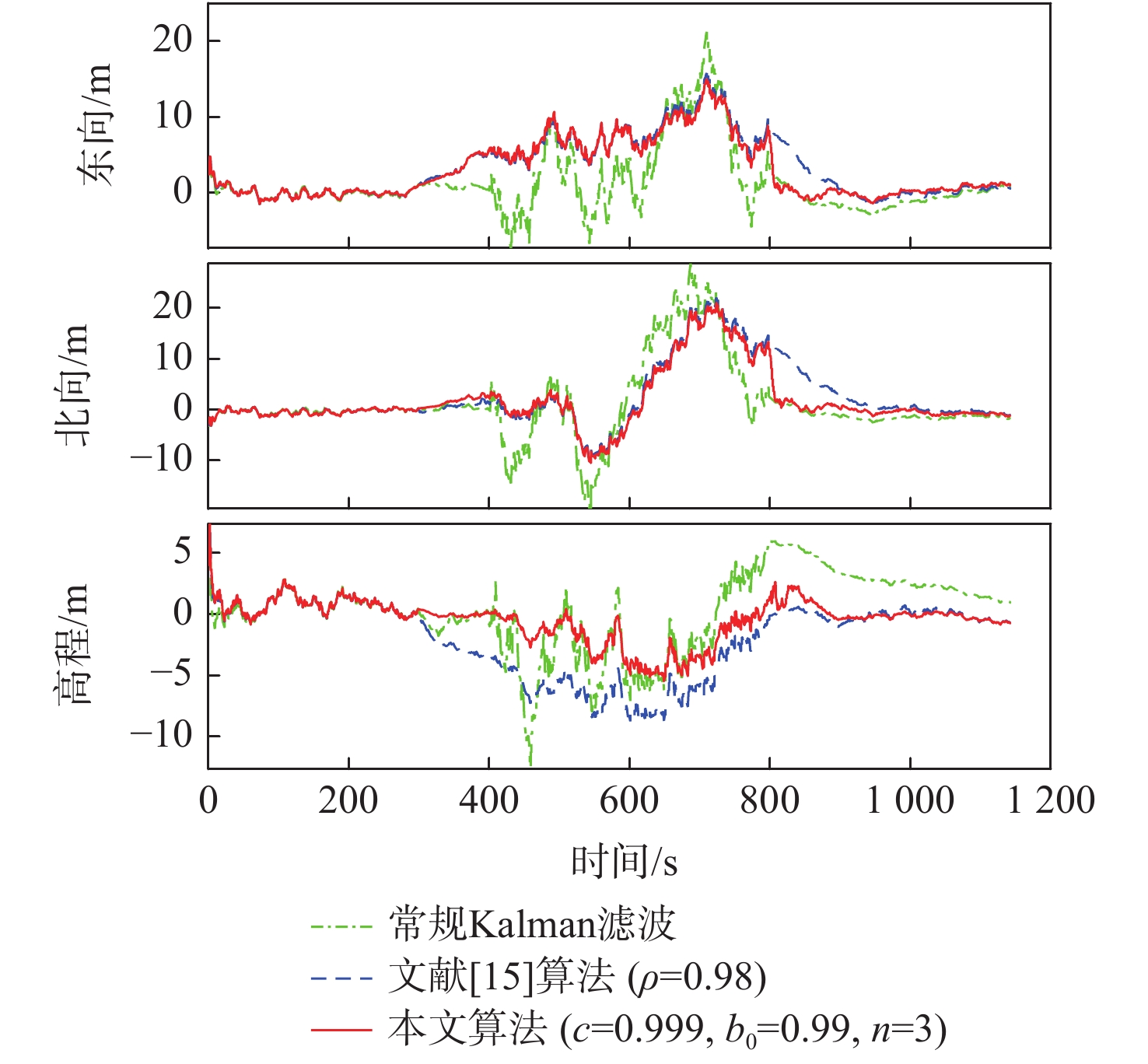
图 21 实测数据组合导航位置误差对比
Figure 21. Comparison of integrated navigation position error with measured data
表 1 传感器参数仿真值
Table 1. Simulation value of sensor parameters
误差项 设定值 陀螺常值零偏/((°)·h−1) 0.05 加速度计常值零偏/μg 1000 陀螺随机误差/($(^\circ )\cdot{\rm{h} }^{-\frac{1}{2} }$) 0.02 加速度计随机误差/(${ {\text{μg} } } \cdot{\text{Hz} }^ {-\frac{1}{2} }$) 500 SINS采样频率/Hz 100 GNSS测速误差($ 1\sigma $)/(m·s−1) 0.2 GNSS定位误差($ 1\sigma $)/m 5 GNSS采样频率/$ {\text{Hz}} $ 1  下载: 导出CSV
下载: 导出CSV
表 2 3种算法速度和位置的均方根差
Table 2. RMSE of velocity and position for three algorithms
算法 速度均方根
误差/($ {{\text{m}} \cdot {\text{s}}} ^{-1}$)位置均方根
误差/m东向 北向 高程 东向 北向 高程 常规Kalman滤波 0.075 0.113 0.029 4.362 7.322 3.146 文献[15]算法
($ \rho $=0.98)0.043 0.071 0.028 4.006 6.257 3.058 本文算法
($ c = 0.999 $,$ {b_0} = 0.99 $, $ n = 3 $)0.039 0.069 0.022 3.828 5.696 1.699
下载: 导出CSV
表 3 船载传感器参数
Table 3. Shipboard sensor parameters
误差项 指标 SINS采样频率/Hz 200 GNSS采样频率/Hz 1 陀螺零漂不稳定性/((°)·h−1) $ \leqslant 0.05 $ 加速度计零偏不稳定性/${\text{μg} }$ $ \leqslant $100 角随机游走/((°)·${\rm{h}}^{-\frac{1}{2}} $) $ 0.012 $
下载: 导出CSV
表 4 实测数据3种算法速度和位置的均方根误差
Table 4. RMSE of velocity and position of three algorithms for measured data
算法 速度均方根误差/(m·s−1) 位置均方根误差/m 东向 北向 高程 东向 北向 高程 GNSS 0.981 0.947 0.954 20.365 24.508 23.861 常规Kalman滤波 0.098 0.119 0.037 5.979 6.089 3.765 文献[15]算法($ \rho $=0.98) 0.086 0.055 0.029 3.968 5.954 1.803 本文算法($ c = 0.999 $,$ {b_0} = 0.98 $, $ n = 3 $) 0.075 0.039 0.028 3.605 5.400 1.395
下载: 导出CSV
-
[1] 严恭敏, 陈若彤, 郭鹍. 多矢量定姿的SVD和QUEST算法等价性分析[J]. 中国惯性技术学报, 2019, 27(5): 568-572.YAN G M, CHEN R T, GUO K. Equivalence analysis between SVD and QUEST for multi-vector attitude determination[J]. Journal of Chinese Inertial Technology, 2019, 27(5): 568-572(in Chinese). [2] ZENG Q H, QIU W Q, LIU J Y, et al. A high dynamics algorithm based on steepest ascent method for GNSS receiver[J]. Chinese Journal of Aeronautics, 2021, 34(12): 177-186. doi: 10.1016/j.cja.2021.01.023 [3] 尹潇, 柴洪洲, 向民志, 等. 附加运动学约束的BDS抗差UKF导航算法[J]. 测绘学报, 2020, 49(11): 1399-1406.YIN X, CHAI H Z, XIANG M Z, et al. Robust UKF algorithm with motion constraint in BDS navigation[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(11): 1399-1406(in Chinese). [4] 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7(2): 50-64. doi: 10.19306/j.cnki.2095-8110.2020.02.007YAN G M, DENG Y. Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning and Timing, 2020, 7(2): 50-64(in Chinese). doi: 10.19306/j.cnki.2095-8110.2020.02.007 [5] 马天力, 张扬, 陈超波. 带不确定混合噪声系统的变分贝叶斯期望最大滤波算法[J]. 中国惯性技术学报, 2021, 29(4): 475-481.MA T L, ZHANG Y, CHEN C B. Variational Bayesian expectation-maximization filter for systems with uncertain hybrid noises[J]. Journal of Chinese Inertial Technology, 2021, 29(4): 475-481(in Chinese). [6] MEHRA R. Approaches to adaptive filtering[J]. IEEE Transactions on Automatic Control, 1972, 17(5): 693-698. doi: 10.1109/TAC.1972.1100100 [7] 孙淑光, 温启新. 改进Sage-Husa算法在飞机组合导航中的应用[J]. 全球定位系统, 2021, 46(3): 54-60.SUN S G, WEN Q X. The application of improved Sage-Husa algorithm in aircraft integrated navigation[J]. GNSS World of China, 2021, 46(3): 54-60(in Chinese). [8] 朋子涵, 高成发, 尚睿. 顾及新息向量的Sage-Husa滤波在手机GNSS定位中的应用[J]. 导航定位学报, 2020, 8(2): 76-81. doi: 10.3969/j.issn.2095-4999.2020.02.013PENG Z H, GAO C F, SHANG R. Application of Sage-Husa filter considering innovation vectors in mobile phone GNSS location[J]. Journal of Navigation and Positioning, 2020, 8(2): 76-81(in Chinese). doi: 10.3969/j.issn.2095-4999.2020.02.013 [9] YANG R, ZHANG A J, ZHANG L F, et al. A novel adaptive H-infinity cubature Kalman filter algorithm based on sage-husa estimator for unmanned underwater vehicle[J]. Mathematical Problems in Engineering, 2020, 2020: 1-10. [10] XU S Q, ZHOU H Y, WANG J Q, et al. SINS/CNS/GNSS integrated navigation based on an improved federated sage–husa adaptive filter[J]. Sensors, 2019, 19(17): 3812. doi: 10.3390/s19173812 [11] LI X R, BAR-SHALOM Y. A recursive multiple model approach to noise identification[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(3): 671-684. doi: 10.1109/7.303738 [12] YANG Y, HE H, XU G. Adaptively robust filtering for kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2): 109-116. [13] 杨元喜, 任夏, 许艳. 自适应抗差滤波理论及应用的主要进展[J]. 导航定位学报, 2013, 1(1): 9-15.YANG Y X, REN X, XU Y. Main progress of adaptively robust filter with applications in navigation[J]. Journal of Navigation and Positioning, 2013, 1(1): 9-15(in Chinese). [14] 徐定杰, 沈忱, 沈锋. 鲁棒化的变分贝叶斯自适应卡尔曼滤波算法[J]. 华中科技大学学报(自然科学版), 2013, 41(11): 128-132.XU D J, SHEN C, SHEN F. Robust variational Bayesian adaptive Kalman filtering algorithm[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2013, 41(11): 128-132(in Chinese). [15] SARKKA S, NUMMENMAA A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations[J]. IEEE Transactions on Automatic Control, 2009, 54(3): 596-600. doi: 10.1109/TAC.2008.2008348 [16] HARTIKAINEN S S J. Variational Bayesian adaptation of noise covariances in non-linear Kalman filtering[EB/OL]. (2023-02-04)[2022-01-04]. https://arxiv.org/abs/1302.0681 [17] 林雪原, 刘丽丽, 董云云, 等. 改进的GNSS/SINS组合导航系统自适应滤波算法[J]. 武汉大学学报(信息科学版), 2023, 48(1): 127-134.LIN X Y, LIU L L, DONG Y Y, et al. Improved adaptive filtering algorithm for GNSS/SINS integrated navigation system[J]. Geomatics and Information Science of Wuhan University, 2023, 48(1): 127-134(in Chinese). [18] HUANG Y L, ZHANG Y G, LI N, et al. A novel robust student’s t-based Kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1545-1554. doi: 10.1109/TAES.2017.2651684 [19] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 88-95.YAN G M, WENG J. Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi’an: Northwestern Polytechnical University Press, 2019: 88-95 (in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 876
- HTML全文浏览量: 36
- PDF下载量: 32
- 被引次数: 0
