



-
摘要:
自主定位是移动机器人的重要任务,机器人绑架问题是定位技术中的难点。基于粒子滤波的自适应蒙特卡罗定位(AMCL)算法能够解决机器人绑架问题,但其在定位恢复过程中需要在全局地图中放入新粒子,恢复效率低。通过对自适应蒙特卡罗定位算法的研究,结合图像学中模板匹配思想,提出了一种基于快速仿射模板匹配的自适应蒙特卡罗定位(AMCL-FM)算法。该算法利用全局代价地图与局部代价地图估计出机器人的真实位置,并在估计出的位置放置新的粒子,提高定位恢复能力。与传统的自适应蒙特卡罗定位算法相比,所提算法定位精度提升了61.13%,定位恢复效率提升了69.23%。
Abstract:Autonomous positioning is an important task of mobile robots, and the problem of robot kidnapping is a difficult point in positioning technology. The adaptive Monte Carlo localization (AMCL) algorithm based on particle filtering can solve the problem of robot kidnapping, but it needed to put new particles on the global map during the positioning recovery process, resulting in low recovery efficiency. An adaptive Monte Carlo localization technique based on fast affine template matching (AMCL-FM) is proposed through research on the adaptive Monte Carlo localization algorithm and the idea of template matching in image science. The algorithm uses the global cost map and the local cost map to estimate the true position of the robot and then places new particles at the estimated position, which improves the effectiveness of the new particles. This algorithm’s positioning accuracy and positioning recovery effectiveness are both up 61.13% and 69.23% from adaptive Monte Carlo localization algorithm, respectively.
-
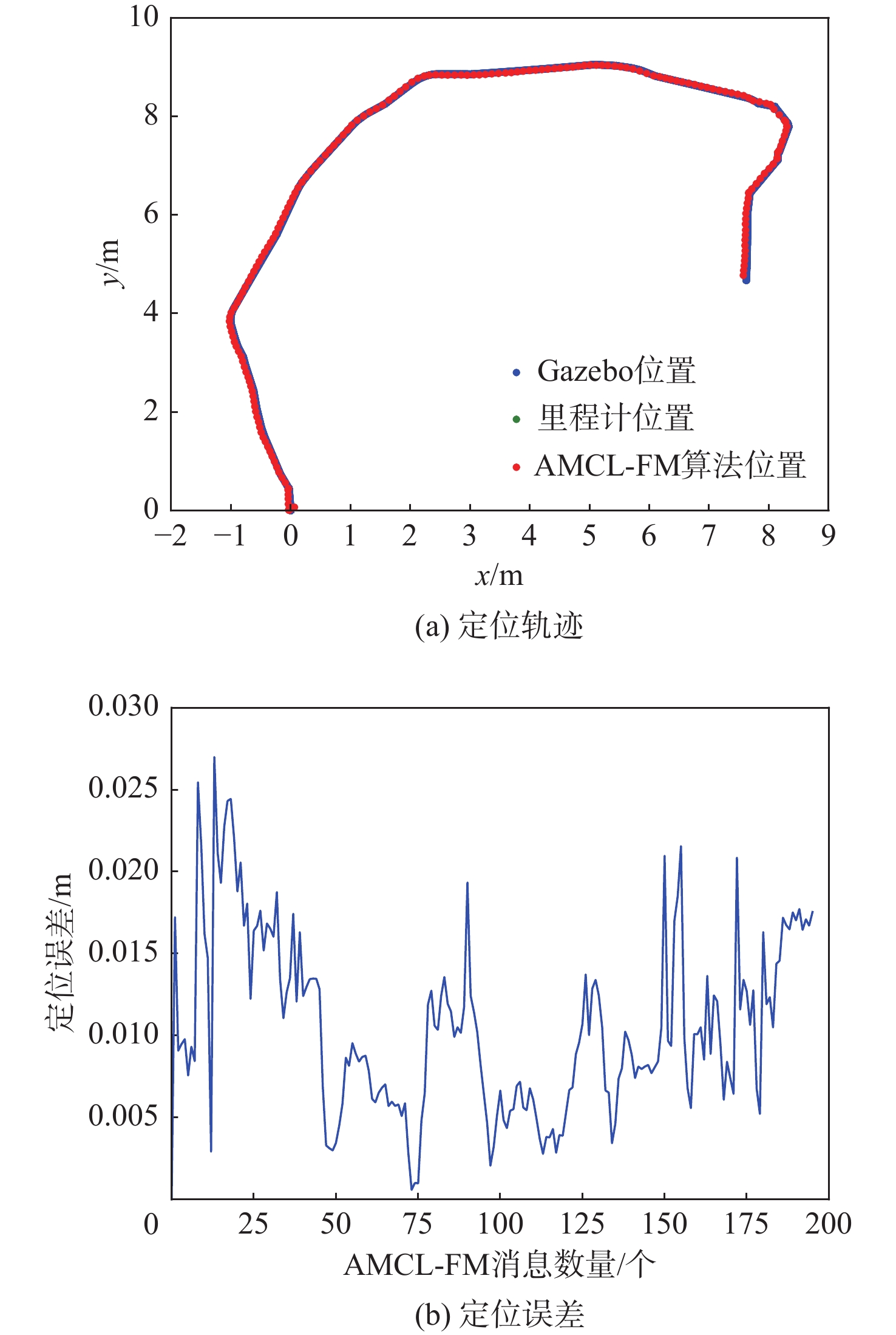
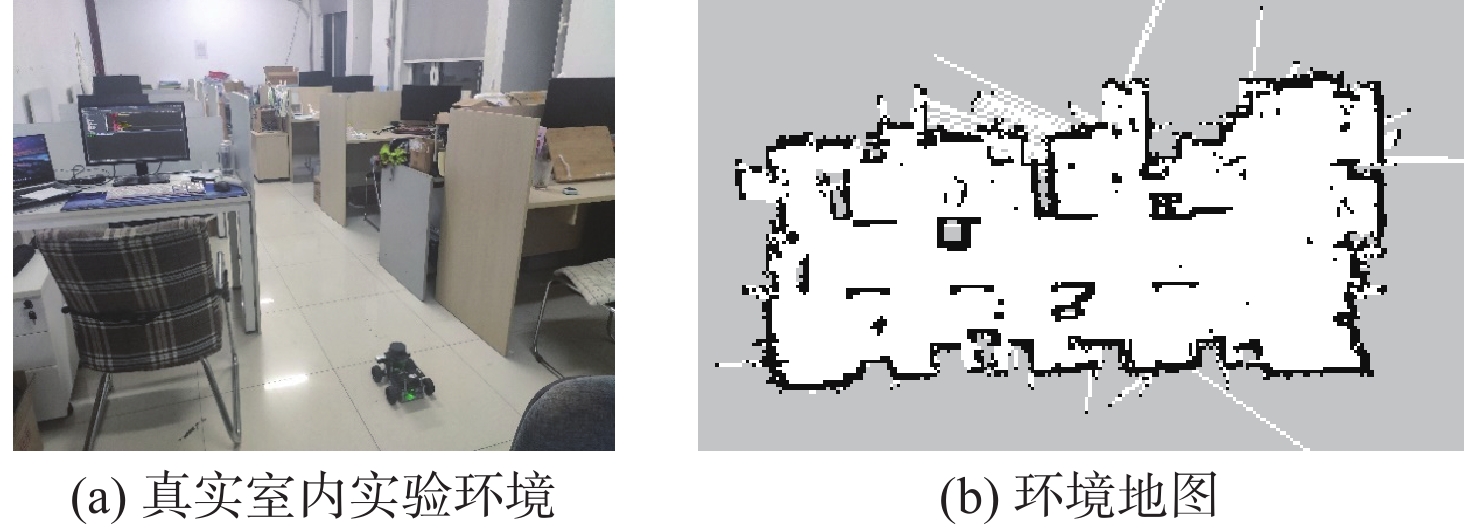
图 12 真实环境小车无绑架实验结果
Figure 12. Real environment car without kidnapping experiment results

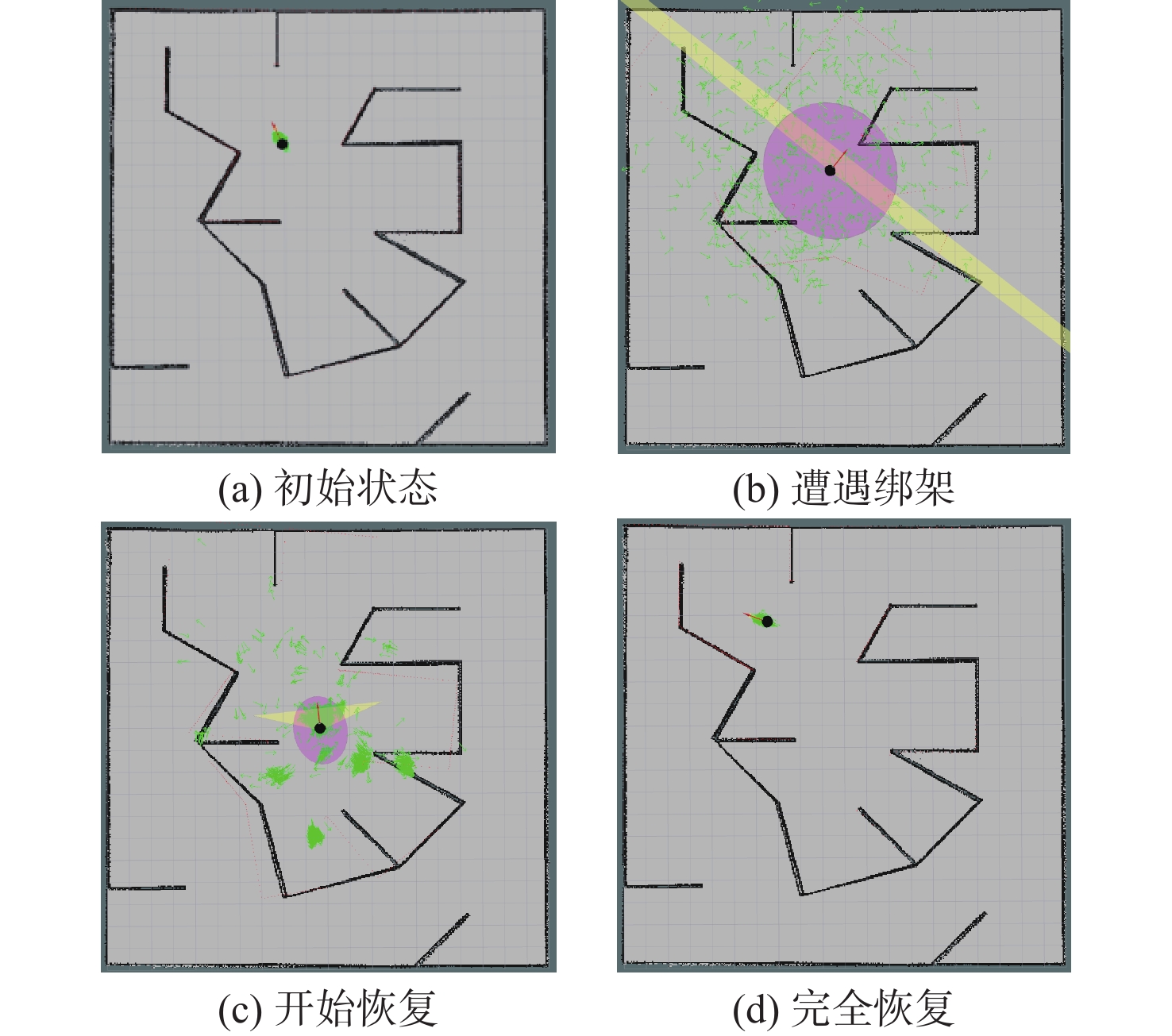
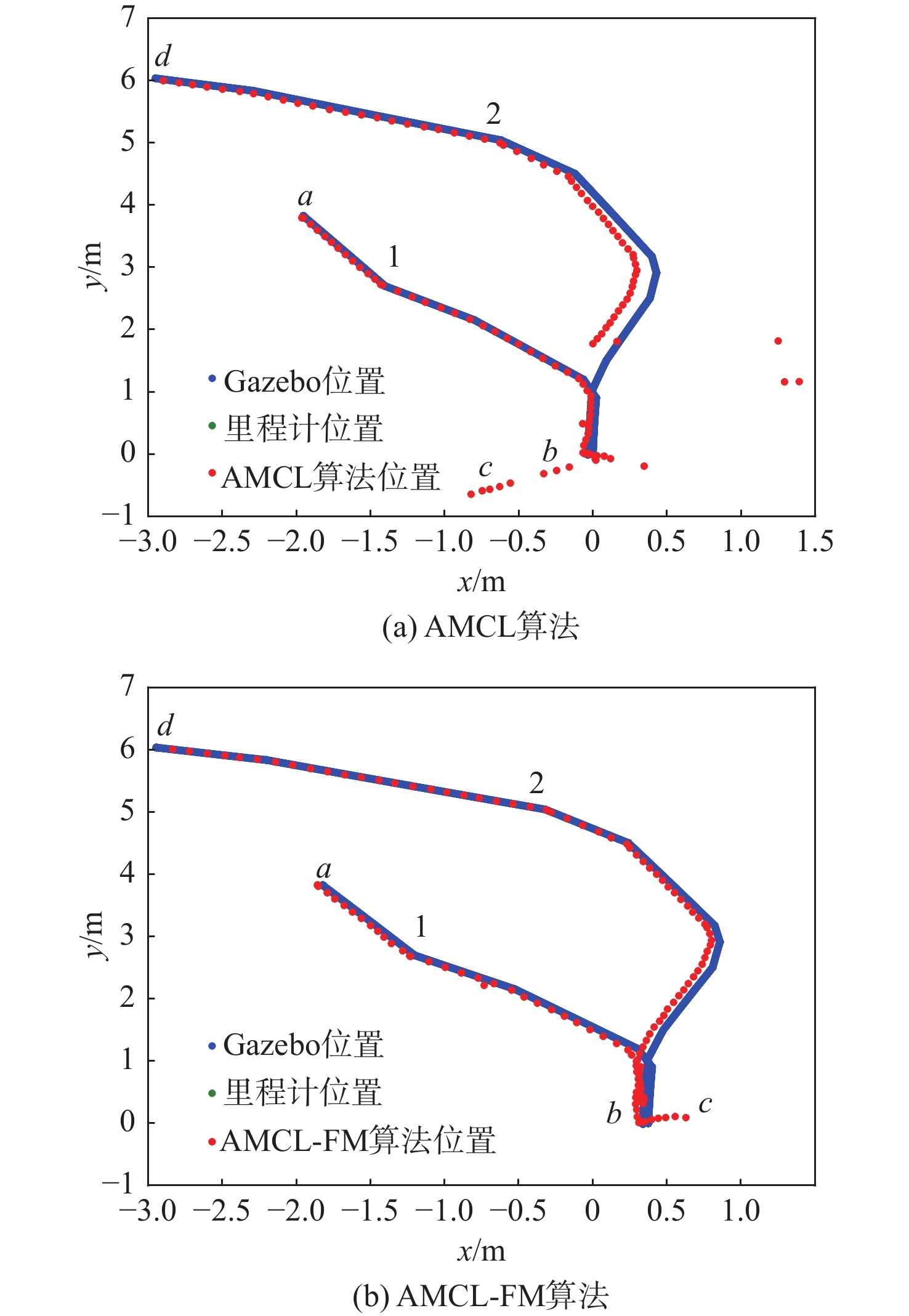
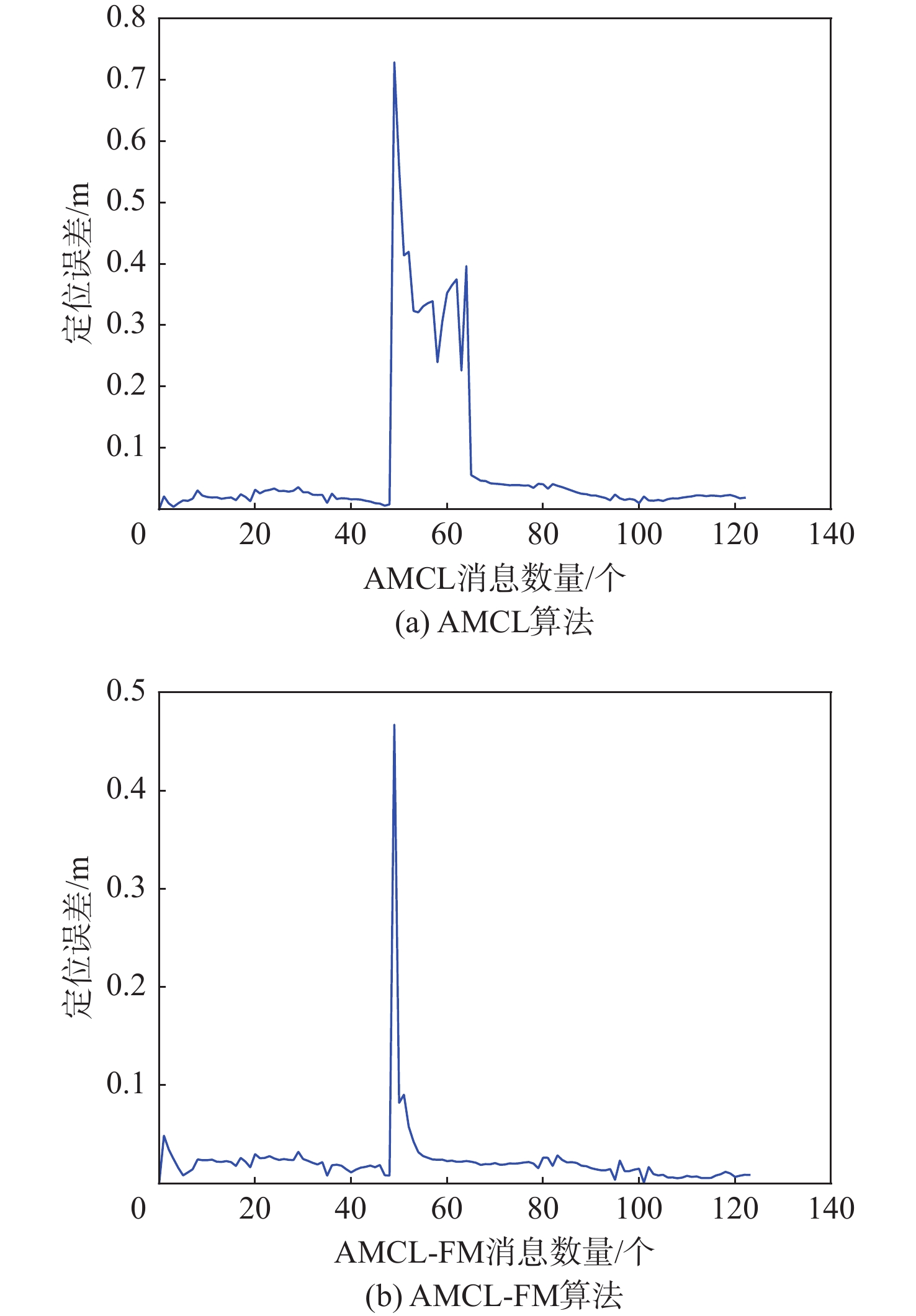
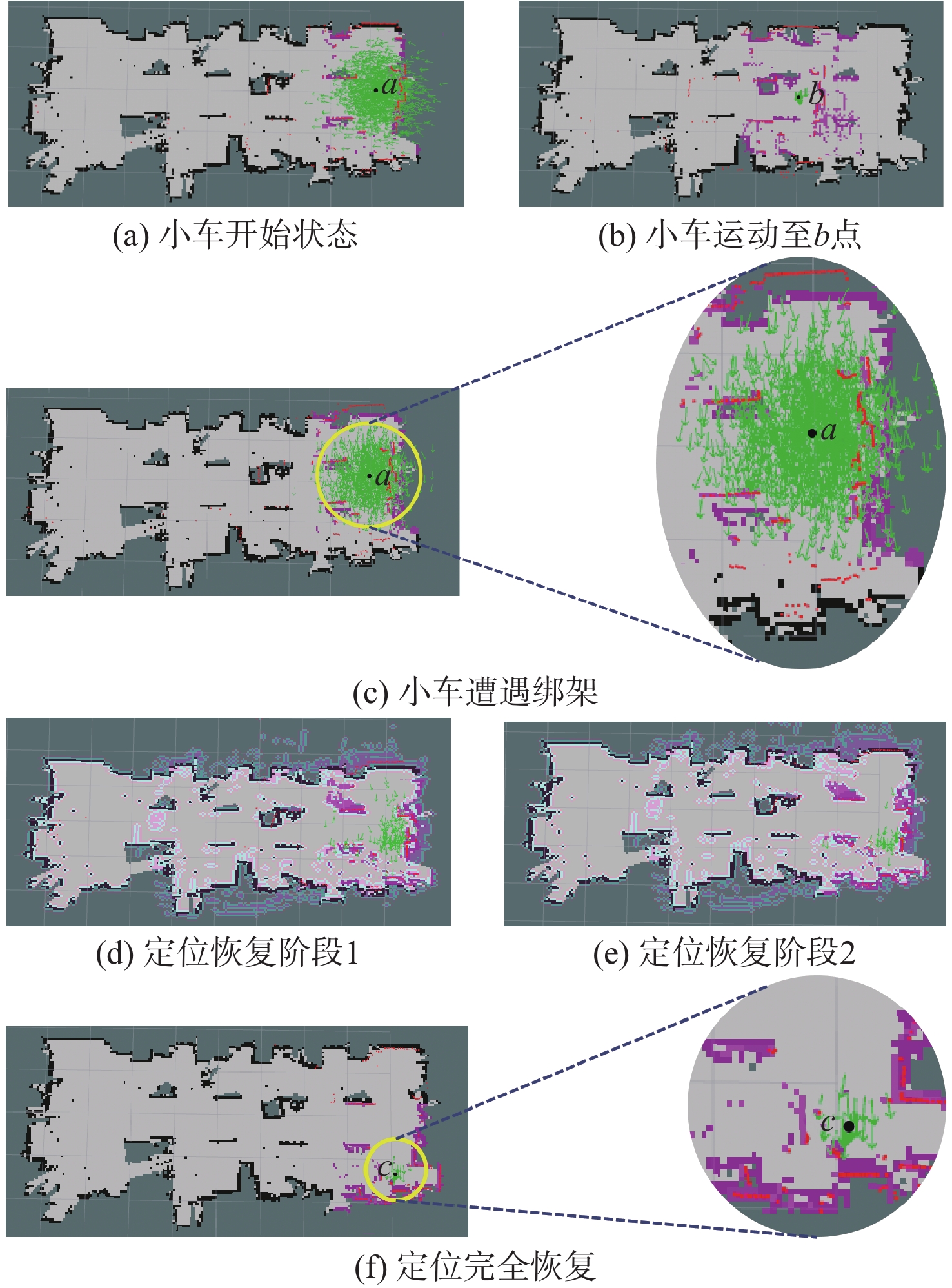
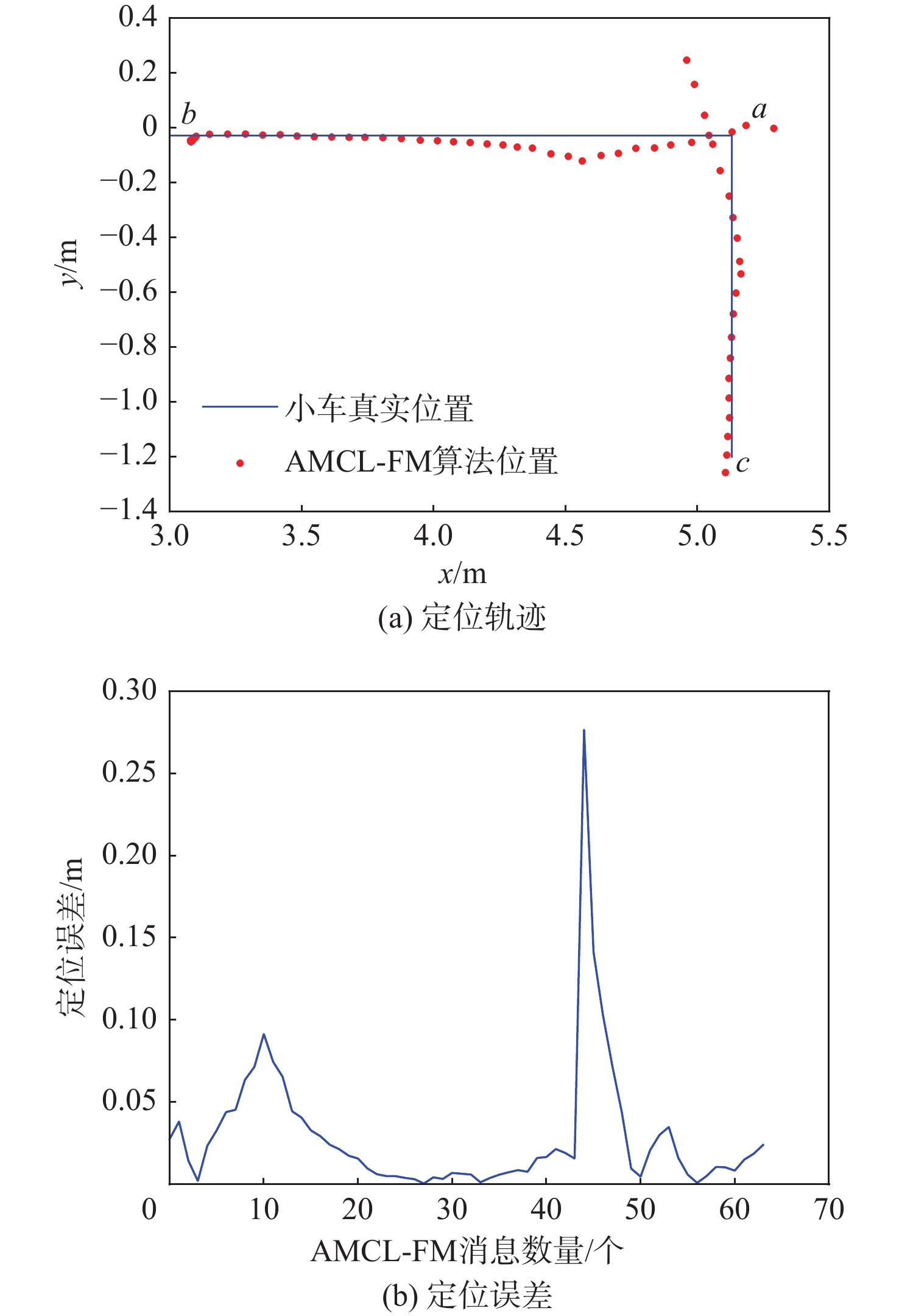
图 14 真实环境绑架实验轨迹与误差
Figure 14. Trajectory and error of kidnapping experiment in real environment
表 1 匹配度比较
Table 1. Match comparison
算法名称 匹配度 平均值 实验1 实验2 实验3 实验4 实验5 AMCL 0.0705 0.0639 0.0628 0.0677 0.0721 0.0674 AMCL-FM 0.023 0.025 0.029 0.021 0.033 0.0262  下载: 导出CSV
下载: 导出CSV
表 2 恢复定位所用时间
Table 2. Time to restore positioning
s 算法名称 恢复定位时间 平均值 实验1 实验2 实验3 实验4 实验5 AMCL 2.7 2.8 2.3 2.5 2.7 2.6 AMCL-FM 0.6 0.9 0.7 0.8 1.0 0.8
下载: 导出CSV
-
[1] 刘明阳, 郑晨, 张昂, 等. 一种轮式机器人轨迹跟踪控制算法的研究[J]. 现代导航, 2020, 11(4): 268-271. doi: 10.3969/j.issn.1674-7976.2020.04.007LIU M Y, ZHENG C, ZHANG A, et al. Research on a wheeled robot tracking control algorithm[J]. Modern Navigation, 2020, 11(4): 268-271(in Chinese). doi: 10.3969/j.issn.1674-7976.2020.04.007 [2] 张立志, 陈殿生, 刘维惠. 基于混合地图的护理机器人室内导航方法[J]. 北京航空航天大学学报, 2018, 44(5): 991-1000. doi: 10.13700/j.bh.1001-5965.2017.0325ZHANG L Z, CHEN D S, LIU W H. Care robot indoor navigation method based on hybrid map[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(5): 991-1000(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0325 [3] BUKHORI I, ISMAIL Z H, NAMERIKAWA T. Detection strategy for kidnapped robot problem in landmark-based map Monte Carlo localization[C]//Proceedings of the IEEE International Symposium on Robotics and Intelligent Sensors. Langkawi: IRIS, 2015: 75-80. [4] FOX D, BURGARD W, KRUPPA H, et al. A probabilistic approach to collaborative multi-robot localization[J]. Autonomous Robots, 2000, 8(3): 325-344. doi: 10.1023/A:1008937911390 [5] BLOK P M, BOHEEMEN K V, EVERT F V, et al. Robot navigation in orchards with localization based on particle filter and Kalman filter[J]. Computers and Electronics in Agriculture, 2019, 157: 261-269. doi: 10.1016/j.compag.2018.12.046 [6] BACCA B, SALVI J, CUFÍ X. Long-term mapping and localization using feature stability histograms[J]. Robotics and Autonomous Systems, 2013, 61(12): 1539-1558. doi: 10.1016/j.robot.2013.07.003 [7] KARKUS P, HSU D, LEE W S. Particle filter networks: End-to-end probabilistic localization from visual observations[EB/OL]. (2018-10-25)[2022-01-01]. https://arxiv.org/abs/1805.08975v1. [8] ZHANG L, ZAPATA R, LEPIBAY P. Self-adaptive Monte Carlo for single-robot and multi-robot localization[C]//Proceedings of the IEEE International Conference on Automation and Logistics. Piscataway: IEEE Press, 2009: 1927-1933. [9] CHEN R, YIN H, JIAO Y, et al. Deep samplable observation model for global localization and kidnapping[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2296-2303. doi: 10.1109/LRA.2021.3061339 [10] AKAI N, HIRAYAMA T, MURASE H. Hybrid localization using model-and learning-based methods: Fusion of Monte Carlo and E2E localizations via importance sampling[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2020: 6469-6475. [11] CHUNG M A, LIN C W. An improved localization of mobile robotic system based on AMCL algorithm[J]. IEEE Sensors Journal, 2021, 22(1): 900-908. [12] 冯佳萌, 裴东, 邹勇, 等. 基于机器人激光定位的一种改进AMCL算法[J]. 激光与光电子学进展, 2021, 58(20): 2028003.FENG J M, PEI D, ZOU Y, et al. An improved AMCL algorithm based on robot laser localization[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2028003(in Chinese). [13] GE G, ZHANG Y, WANG W, et al. Text-MCL: Autonomous mobile robot localization in similar environment using text-level semantic information[J]. Machines, 2022, 10(3): 169. doi: 10.3390/machines10030169 [14] JIA D, CAO J, SONG W, et al. Colour FAST (CFAST) match: Fast affine template matching for colour images[J]. Electronics Letters, 2016, 52(14): 1220-1221. doi: 10.1049/el.2016.1331 [15] THRUN S, BURGARD W, FOX D. 概率机器人[M]. 曹红玉, 谭志, 史晓霞, 等译. 北京: 机械工业出版社, 2017: 187-203.THRUN S, BURGARD W, FOX D. Probabilistic robotics[M]. CAO H Y, TAN Z, SHI X X, et al, translated. Beijing: Machinery Industry Press, 2017: 187-203(in Chinese). [16] GRISETTI G, STACHNISS C, BURGARD W. Improved techniques for grid mapping with Rao-Blackwellized particle filters[J]. IEEE Transactions on Robotics, 2007, 23(1): 34-46. doi: 10.1109/TRO.2006.889486 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 210
- HTML全文浏览量: 517
- PDF下载量: 40
- 被引次数: 0
